
Já vi muitos projetos desacelerarem porque colocaram o rastreamento inteligente no lugar errado. No meu trabalho, sempre procuro o caminho mais rápido para um rastreamento estável.
Para ligação de lente dupla, o processamento de IA é geralmente feito na Edge, dentro da própria câmera, não no Backend. Isso proporciona uma resposta mais rápida, menor latência e melhor estabilidade quando a rede está fraca ou completamente perdida.
 backend de ponta com IA de lente dupla
backend de ponta com IA de lente dupla
Frequentemente explico isso a integradores de sistemas que trabalham em fazendas, canteiros de obras e pátios remotos. A verdadeira questão não é apenas onde a IA é executada. A verdadeira questão é se a câmera pode reagir rápido o suficiente quando um alvo se move.
Índice
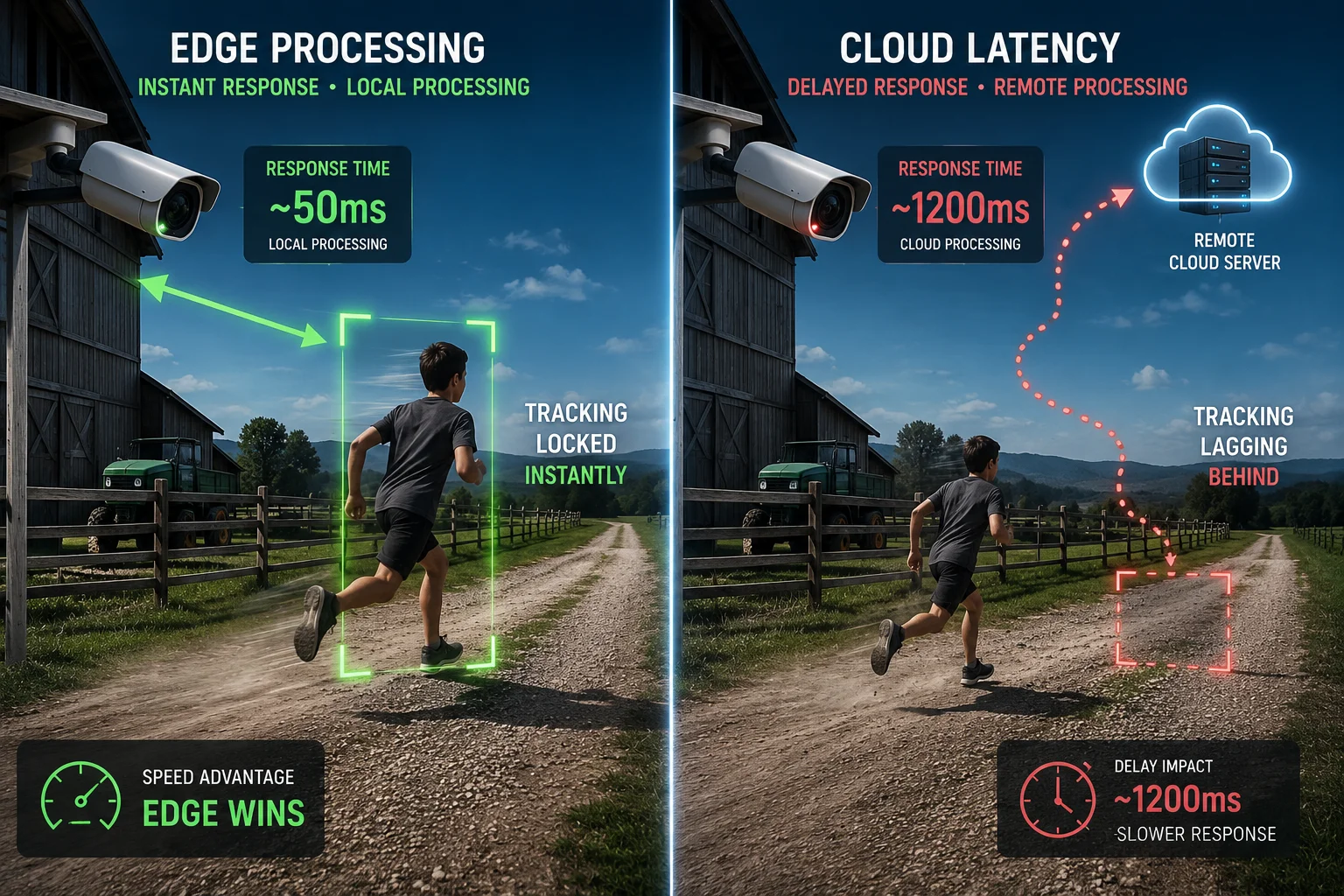
A ligação baseada na Edge garante um tempo de resposta mais rápido para rastreamento automático1 que um configuração baseada na nuvem2?
Aprendi que o atraso é a primeira coisa que quebra o rastreamento automático. Se a câmera esperar pelo feedback da nuvem, o alvo pode se mover antes mesmo que a PTZ comece a girar.
Sim, a ligação baseada na Edge é muito mais rápida do que uma configuração baseada na nuvem para rastreamento automático. A câmera processa o alvo localmente, para que possa enviar comandos PTZ em tempo real sem esperar por idas e vindas da rede.
 rastreamento automático de ponta vs nuvem
rastreamento automático de ponta vs nuvem
Gosto de pensar nisso como uma corrida entre reação local e controle remoto. A Edge vê o alvo, toma a decisão e move a PTZ dentro do mesmo dispositivo. Um sistema em nuvem precisa enviar o vídeo para cima, esperar pela análise e, em seguida, receber o comando de volta. Esse caminho extra adiciona latência. Em uma rede de escritório normal, essa latência pode parecer pequena no papel. No campo, muitas vezes parece muito maior.
Por que o processamento local é tão importante
Trabalho com clientes que se preocupam com resultados reais, não apenas com folhas de especificações. Eles querem que a câmera acompanhe uma pessoa andando, um carro entrando em um portão ou um trabalhador se movendo por um pátio. Uma configuração baseada na nuvem pode ser boa para revisão e armazenamento, mas é fraca para controle ao vivo. Se a rede estiver ocupada, a câmera pode perder o momento.
| Método de Rastreamento | Onde a IA é executada | Velocidade de Resposta | Melhor caso de uso |
|---|---|---|---|
| Ligação de Borda | Dentro da câmera | Muito rápido | Rastreamento automático ao vivo |
| Ligação na nuvem | Servidor remoto | Mais lento | Histórico, relatórios, controle central |
| Configuração híbrida3 | Tanto Borda quanto Backend | Equilibrado | Grandes projetos com necessidades mistas |
Eu também vejo uma clara razão de negócio aqui. Um cliente que paga por uma câmera quer que a câmera funcione na borda do local, não apenas quando a internet está perfeita. Se o alvo estiver se movendo rapidamente, mesmo um pequeno atraso pode prejudicar o resultado. É por isso que eu trato a computação de Borda como a camada base para a ligação de lente dupla.
Por que o atraso da nuvem se torna um problema real de campo
Lidei com locais onde a rede parecia boa no escritório, mas falhava no campo. Um sinal 4G pode oscilar para cima e para baixo. Ele também pode sofrer com perda de pacotes, carga da torre e problemas climáticos. Quando isso acontece, o rastreamento na nuvem começa a parecer lento e instável. A PTZ pode ultrapassar o alvo. Pode corrigir tarde. Pode até perder o alvo após uma curta pausa.
Eu também sei que muitos compradores usam o rastreamento automático para cortar custos de mão de obra. Eles querem que a câmera siga o assunto sozinha, para que não precisem de um guarda para mover a visão o dia todo. Se o rastreamento reagir tarde, o valor de todo o sistema diminui. É por isso que sempre coloco o cérebro de rastreamento dentro do corpo da câmera quando projeto para esses casos de uso.
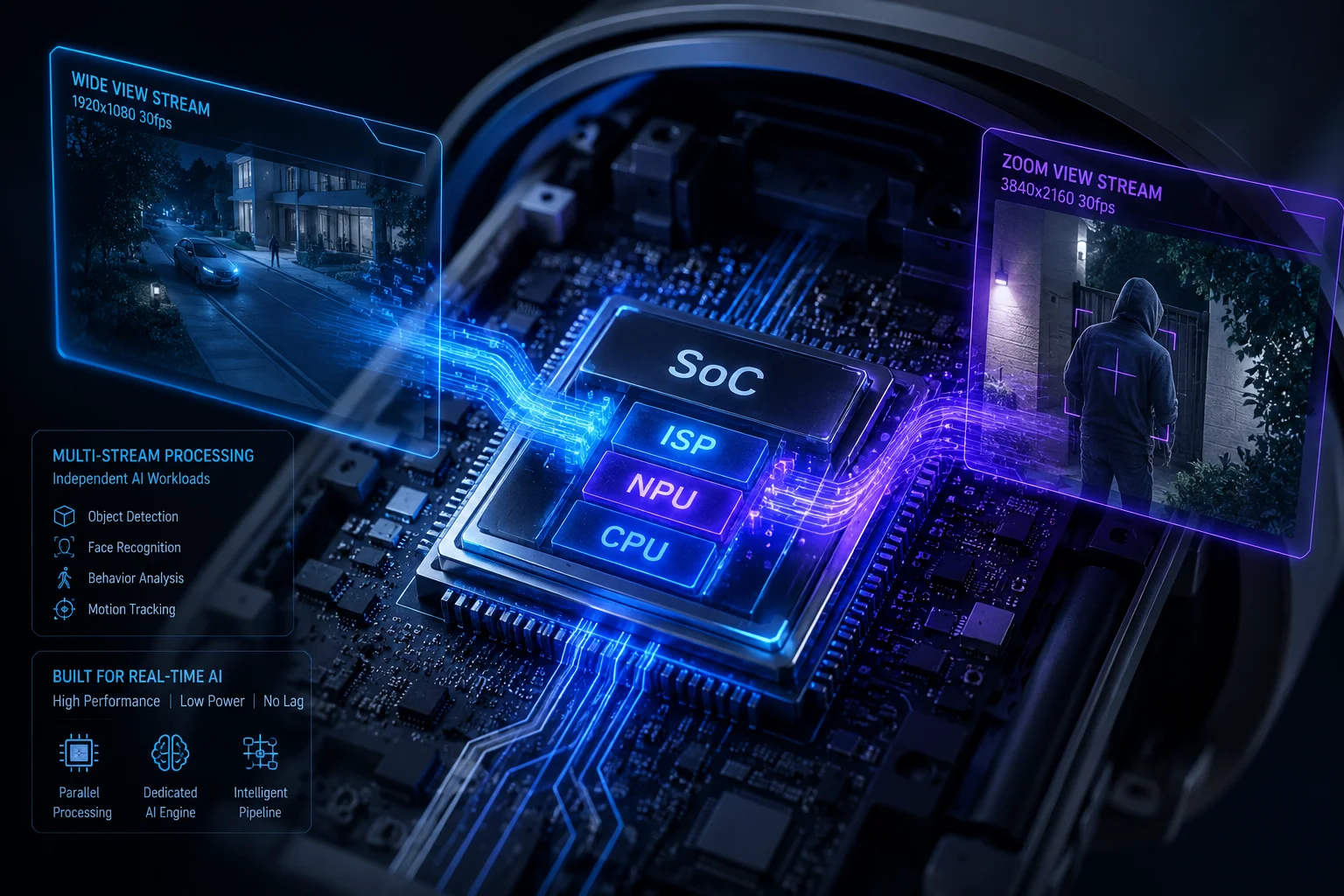
Como o SoC da câmera gerencia o processamento simultâneo de IA de dois feeds de vídeo independentes?
Frequentemente me perguntam como uma câmera pode processar dois fluxos de vídeo ao mesmo tempo sem travar. A resposta não é mágica. É uma mistura de design de SoC, NPU4 energia e divisão inteligente de tarefas.
O SoC da câmera gerencia ambos os fluxos usando blocos de hardware integrados, especialmente o NPU e o ISP, para que possa executar a detecção em um fluxo e o controle em outro fluxo ao mesmo tempo com baixo atraso.
 processamento de fluxo duplo soc
processamento de fluxo duplo soc
Eu vejo isso como uma pequena fábrica dentro da câmera. Uma parte lê a imagem. Uma parte a limpa. Uma parte executa IA. Outra parte lida com o controle de movimento. A câmera não envia todo o trabalho para um único núcleo de CPU fraco. Ela divide o trabalho. É assim que ela mantém ambas as lentes ativas ao mesmo tempo.
Como a carga de trabalho é dividida
Em uma ligação de lente dupla5 câmera, a lente fixa geralmente observa uma cena ampla. A lente PTZ então segue o alvo. A lente fixa faz o primeiro trabalho. Ela encontra a pessoa ou veículo. A SoC6 pega esse resultado e o transforma em uma ação PTZ. Isso pode acontecer muitas vezes por segundo.
| Bloco da Câmera | Trabalho Principal | Por que é importante |
|---|---|---|
| Provedor de Serviços de Internet7 | Melhora os dados brutos da imagem | Ajuda a IA a ver quadros mais claros |
| NPU | Executa modelos de detecção de IA | Torna a análise local rápida |
| CPU | Gerencia a lógica de controle | Envia comandos de rastreamento |
| Controle do motor PTZ | Move a lente | Mantém o alvo centralizado |
Acho que essa divisão é importante porque o trabalho de lente dupla não é apenas “duas câmeras em um invólucro”. É uma cadeia de tarefas. Se uma parte for muito lenta, toda a cadeia desacelera. Um bom SoC mantém a cadeia apertada. Ele pode lidar com detecção de alvo, conversão de coordenadas e controle PTZ8 sem sobrecarregar o trabalho principal para um servidor remoto.
Por que feeds independentes precisam de agendamento inteligente
Também presto atenção à taxa de quadros e ao uso de recursos. Dois feeds podem criar uma carga pesada. Se ambos os feeds rodarem em alta resolução e alta taxa de quadros, o chip deve agendar bem o trabalho. A câmera pode usar um feed para detecção de cena ampla e o outro para visualização detalhada com zoom. Ela também pode reduzir a carga de IA executando a detecção completa apenas em quadros selecionados.
Como explico isso aos compradores
Quando falo com compradores técnicos como David Miller, mantenho a explicação simples. Digo que o SoC é o gerente de tráfego. Ele não apenas processa vídeo. Ele decide qual tarefa tem prioridade. Ele ajuda a câmera a continuar rastreando mesmo quando a cena muda rapidamente. É por isso que um bom design de hardware é tão importante em um produto de IA de lente dupla.
O link de lente dupla ainda funcionará se o rede 4G9 conexão for completamente perdida?
Sei que esta é uma das maiores preocupações para implantação em campo. Muitos clientes trabalham em locais onde a rede não é estável o dia todo. Eles não querem uma câmera que falhe no momento em que o sinal cai.
Sim, o link de lente dupla ainda pode funcionar se o 4G for completamente perdido, desde que a lógica de IA e o controle PTZ sejam tratados localmente na câmera. O link não precisa de acesso constante à nuvem para continuar rastreando alvos.
 4g perdido lente dupla continua
4g perdido lente dupla continua
Quero enfatizar este ponto porque ele importa em projetos reais. Muitas pessoas pensam que o 4G é o cérebro do sistema. Não é. Em uma câmera Edge bem projetada, o 4G é apenas o canal para visualização remota, alertas e dados da plataforma. A decisão real de rastreamento deve permanecer dentro do dispositivo. É isso que mantém o sistema funcionando durante uma interrupção de rede.
O que ainda funciona quando a rede cai
Se a câmera for bem construída, várias funções principais devem continuar durante uma perda total de 4G:
| Função | Funciona sem 4G? | Notas |
|---|---|---|
| Detecção local de IA | Sim | Executa dentro da câmera |
| Rastreamento automático | Sim | PTZ segue o alvo localmente |
| gravação em cartão SD | Sim | Salva vídeo no local |
| Saída de alarme | Frequentemente sim | Depende do design do modelo |
| Visualização ao vivo na nuvem | Não | Requer conexão de rede |
Considero este ponto muito importante para fazendas, locais e estradas remotas. Esses locais geralmente têm cobertura fraca. Uma câmera que depende de controle na nuvem é muito frágil lá. Se a rede cair, o sistema ainda deve realizar sua função principal. Deve detectar, rastrear e gravar. Essa é a promessa básica da IA de Borda.
Por que a autonomia local é mais importante do que o controle remoto
Também penso em risco. Se uma câmera perde a rede e também perde o rastreamento, o cliente perde visibilidade e confiança. Isso é ruim para qualquer projeto de segurança. Mas se a câmera continuar rastreando por conta própria, o local ainda terá proteção. O operador pode perder a visualização remota ao vivo por um tempo, mas a câmera não se torna inútil.
Também vejo isso como um problema de serviço. Se um local remoto precisar de uma visita técnica toda vez que a rede cair, o custo aumenta rapidamente. O cliente pode gastar mais em serviço do que na própria câmera. É por isso que defendo a tomada de decisão local. Isso protege o desempenho e o orçamento.
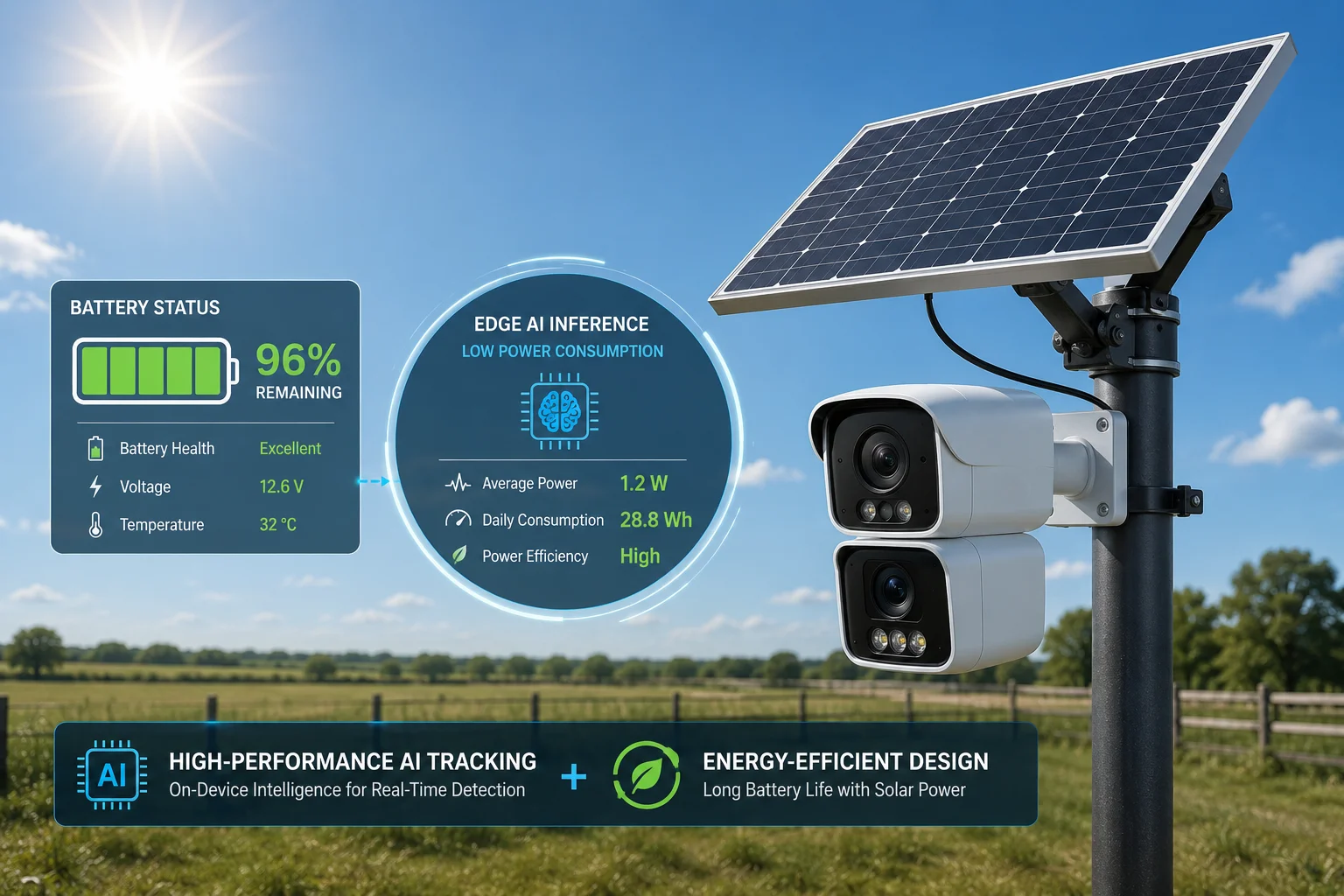
Qual é o consumo de energia10 diferença quando ambas as lentes estão realizando análise de IA na Borda?
Frequentemente ouço clientes perguntarem se a IA de Borda consumirá muita energia. Essa pergunta é muito justa, especialmente para sistemas solares e 4G. O uso de energia pode determinar o sucesso ou o fracasso de todo o projeto.
Quando ambas as lentes executam IA na Borda, o consumo de energia é maior do que a gravação simples, mas ainda é muito mais eficiente do que enviar vídeo pesado para o Backend para análise. Uma câmera bem projetada usa chips dedicados para manter o uso de energia sob controle.
 consumo de energia ia de borda
consumo de energia ia de borda
Eu olho para o uso de energia de forma prática. A câmera deve equilibrar a carga de IA, o movimento da lente, o infravermelho, a transmissão 4G e o armazenamento. Se o dispositivo usar um design fraco, a bateria descarrega rapidamente e o painel solar não consegue acompanhar. Se o dispositivo usar um bom SoC e agendamento inteligente, ele pode executar IA forte sem desperdiçar energia.
O que aumenta o consumo de energia
Existem algumas razões principais para o aumento do consumo de energia quando ambas as lentes executam IA:
| Fator de Potência | Efeito no Uso | Razão Simples |
|---|---|---|
| Inferência de IA | Médio a alto | A NPU trabalha duro |
| Movimento PTZ | Médio | Motores precisam de corrente |
| Transmissão 4G | Médio | Rádio usa energia para enviar dados |
| IR noturno ou laser | Alta | Iluminação é cara em termos de energia |
| Alta taxa de quadros | Médio | Mais quadros significam mais trabalho |
Acho que ajuda a separar a “energia da IA” da “energia do sistema”. A IA é apenas uma parte. Em muitos casos, o maior consumo vem da iluminação noturna e do movimento PTZ, não do modelo de detecção em si. É por isso que me importo tanto com o design completo, não apenas com as especificações do chip.
Por que a IA de Borda ainda pode ser a melhor opção de energia
Acredito que a IA de Borda geralmente economiza mais energia do que uma configuração em nuvem porque a câmera não precisa transmitir vídeo bruto pesado o tempo todo. O uplink de vídeo pode ser caro. A câmera pode precisar manter o rádio 4G ativo por mais tempo. Também pode precisar de configurações de taxa de bits mais altas para ajudar os servidores remotos a analisar a cena. Isso adiciona carga.
Com a IA de Borda, a câmera pode enviar apenas eventos, metadados e clipes curtos quando necessário. Isso reduz o uso de dados e geralmente reduz o trabalho total do sistema. Para projetos solares, isso é um grande negócio. Um orçamento de energia menor e mais inteligente pode significar menos problemas de bateria e menos falhas de inicialização a frio após mau tempo.
Como guio os compradores neste ponto
Quando discuto energia com os compradores, faço três perguntas simples. O local tem energia estável? Precisa de rastreamento em tempo integral? Precisa de IA noturna também? Se a resposta for sim para todos os três, então recomendo um modelo com um plano de bateria forte, uma configuração solar adequada configuração solar11, e um SoC de câmera feito para trabalho contínuo de Borda. Não recomendo adivinhar. Recomendo medir a carga real de campo.
Conclusão
Trato o link de lente dupla como uma tarefa de Borda primeiro, porque a IA local oferece rastreamento mais rápido, melhor tempo de atividade e implantação de campo mais segura.
1. Explore como o rastreamento automático funciona em câmeras PTZ para seguir alvos em movimento. ︎↩︎ 2. Entenda as compensações entre análise de vídeo baseada em nuvem e processamento local. ︎↩︎ 3. Descubra como as arquiteturas híbridas de borda-nuvem equilibram desempenho e escalabilidade. ︎↩︎ 4. Descubra como as Unidades de Processamento Neural aceleram a inferência de IA em dispositivos de borda. ︎↩︎ 5. Compreender o conceito de sistemas de câmeras de lente dupla para segurança e vigilância. ︎↩︎ 6. Aprender como o System-on-Chip integra múltiplas unidades de processamento para IA de câmera. ︎↩︎ 7. Compreender o papel dos Processadores de Sinal de Imagem na melhoria da qualidade de vídeo para IA. ︎↩︎ 8. Aprender sobre os mecanismos de controle de câmeras Pan-Tilt-Zoom e suas aplicações. ︎↩︎ 9. Compreender as redes celulares 4G e seu papel na conectividade remota de câmeras. ︎↩︎ 10. Aprender sobre os fatores que afetam o uso de energia em dispositivos de IA de ponta (edge). ︎↩︎ 11. Compreender como os sistemas de energia solar suportam instalações remotas de câmeras. ︎↩︎