
Ich habe viele Projekte verlangsamt gesehen, weil sie intelligentes Tracking an der falschen Stelle platziert haben. Bei meiner Arbeit suche ich immer nach dem schnellsten Weg zu stabilem Tracking.
Bei der Dual-Lens-Verknüpfung wird die KI-Berechnung normalerweise am Edge, innerhalb der Kamera selbst, und nicht im Backend durchgeführt. Dies sorgt für eine schnellere Reaktion, geringere Verzögerung und bessere Stabilität, wenn das Netzwerk schwach ist oder vollständig ausfällt.
 Dual-Lens KI Edge Backend
Dual-Lens KI Edge Backend
Ich erkläre dies oft Systemintegratoren, die auf Bauernhöfen, Baustellen und abgelegenen Höfen arbeiten. Die eigentliche Frage ist nicht nur, wo die KI läuft. Die eigentliche Frage ist, ob die Kamera schnell genug reagieren kann, wenn sich ein Ziel bewegt.
Inhaltsübersicht
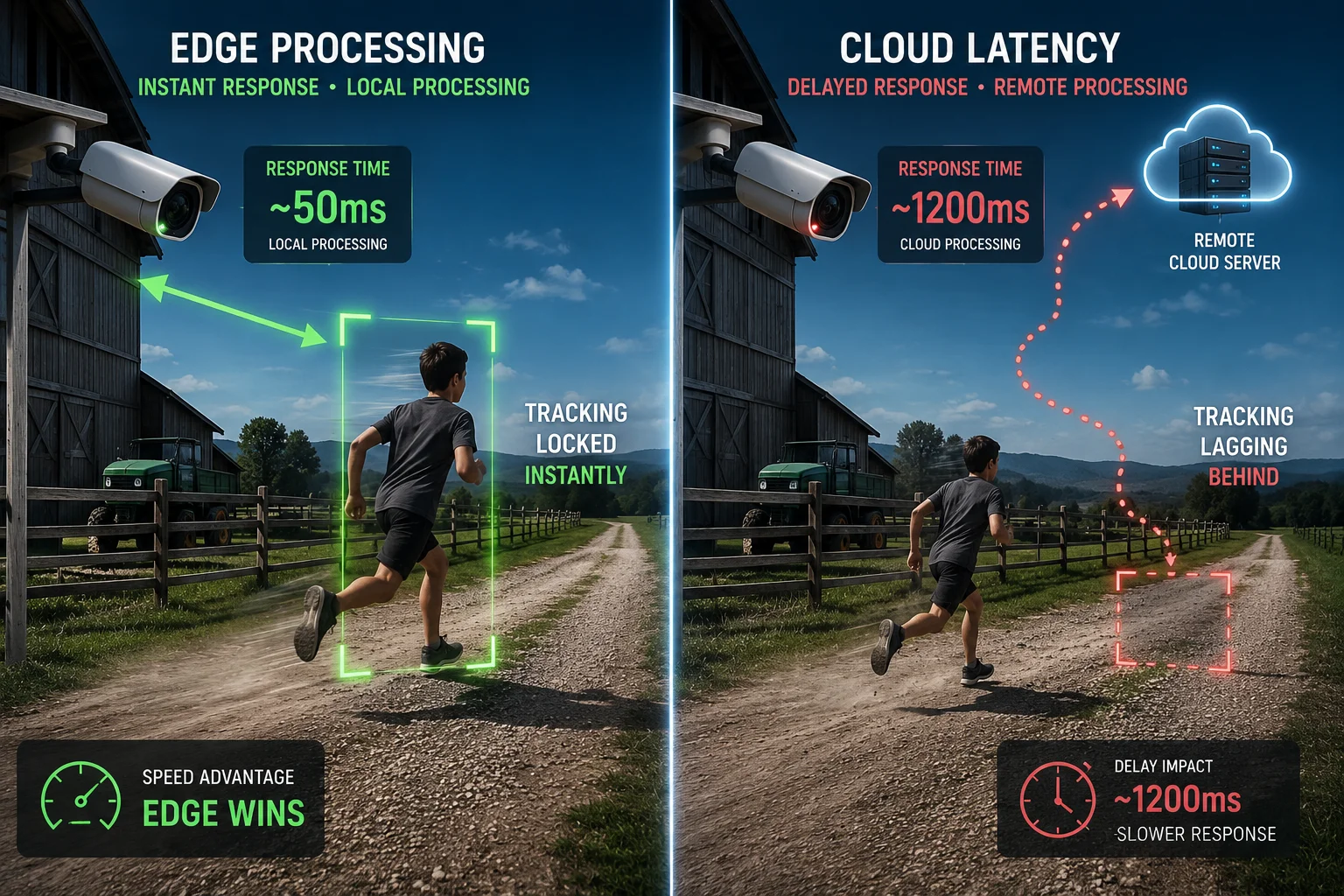
Gewährleistet die Edge-basierte Verknüpfung eine schnellere Reaktionszeit für automatischen Verfolgungsmodus1 als ein Cloud-basiertes Setup2?
Ich habe gelernt, dass Verzögerung das Erste ist, was das Auto-Tracking zum Scheitern bringt. Wenn die Kamera auf eine Cloud-Rückmeldung wartet, kann sich das Ziel bereits wegbewegt haben, bevor sich die PTZ überhaupt zu drehen beginnt.
Ja, die Edge-basierte Verknüpfung ist für das Auto-Tracking wesentlich schneller als ein Cloud-basiertes Setup. Die Kamera verarbeitet das Ziel lokal, sodass sie PTZ-Befehle in Echtzeit senden kann, ohne auf Netzwerk-Roundtrips warten zu müssen.
 Edge vs. Cloud Auto-Tracking
Edge vs. Cloud Auto-Tracking
Ich stelle mir das gerne als Wettrennen zwischen lokaler Reaktion und Fernsteuerung vor. Der Edge erkennt das Ziel, trifft die Entscheidung und bewegt die PTZ innerhalb desselben Geräts. Ein Cloud-System muss das Video hochsenden, auf die Analyse warten und dann den Befehl zurückbekommen. Dieser zusätzliche Weg führt zu Verzögerungen. In einem normalen Büronetzwerk mag diese Verzögerung auf dem Papier gering erscheinen. Im Feld fühlt sie sich oft viel größer an.
Warum lokale Verarbeitung so wichtig ist
Ich arbeite mit Kunden zusammen, denen es um echte Ergebnisse geht, nicht nur um Datenblätter. Sie möchten, dass die Kamera mit einer gehenden Person, einem Auto, das durch ein Tor fährt, oder einem Arbeiter, der sich über einen Hof bewegt, mithalten kann. Ein Cloud-basiertes Setup kann für die Überprüfung und Speicherung gut sein, ist aber für die Live-Steuerung schwach. Wenn das Netzwerk ausgelastet ist, kann die Kamera den Moment verpassen.
| Tracking-Methode | Wo KI läuft | Reaktionsgeschwindigkeit | Bester Anwendungsfall |
|---|---|---|---|
| Edge-Verknüpfung | Innerhalb der Kamera | Sehr schnell | Live-Autotracking |
| Cloud-Verknüpfung | Remote-Server | Langsamer | Verlauf, Berichte, zentrale Steuerung |
| Hybride Einrichtung3 | Sowohl Edge als auch Backend | Ausgewogen | Große Projekte mit gemischten Anforderungen |
Ich sehe hier auch einen klaren geschäftlichen Grund. Ein Kunde, der für eine Kamera bezahlt, möchte, dass die Kamera am Rande des Standorts funktioniert, nicht nur, wenn das Internet perfekt ist. Wenn sich das Ziel schnell bewegt, kann selbst eine kurze Verzögerung das Ergebnis beeinträchtigen. Deshalb betrachte ich Edge Computing als Basisschicht für die Dual-Lens-Verknüpfung.
Warum Cloud-Verzögerung zu einem echten Feldproblem wird
Ich habe Standorte betreut, an denen das Netzwerk im Büro gut aussah, aber im Feld versagte. Ein 4G-Signal kann schwanken. Es kann auch unter Paketverlust, Netzwerkauslastung und Wetterproblemen leiden. Wenn das passiert, fühlt sich die Cloud-Verfolgung langsam und instabil an. Die PTZ kann überschießen. Sie kann spät korrigieren. Sie kann das Ziel sogar nach einer kurzen Pause verlieren.
Ich weiß auch, dass viele Käufer Autotracking nutzen, um Arbeitskosten zu senken. Sie möchten, dass die Kamera das Motiv von selbst verfolgt, damit sie keinen Wachmann brauchen, der den Blick den ganzen Tag bewegt. Wenn die Verfolgung spät reagiert, sinkt der Wert des gesamten Systems. Deshalb platziere ich das Tracking-Gehirn immer im Kameragehäuse, wenn ich für diese Anwendungsfälle entwerfe.
Wie verwaltet der SoC der Kamera die gleichzeitige KI-Verarbeitung von zwei unabhängigen Videostreams?
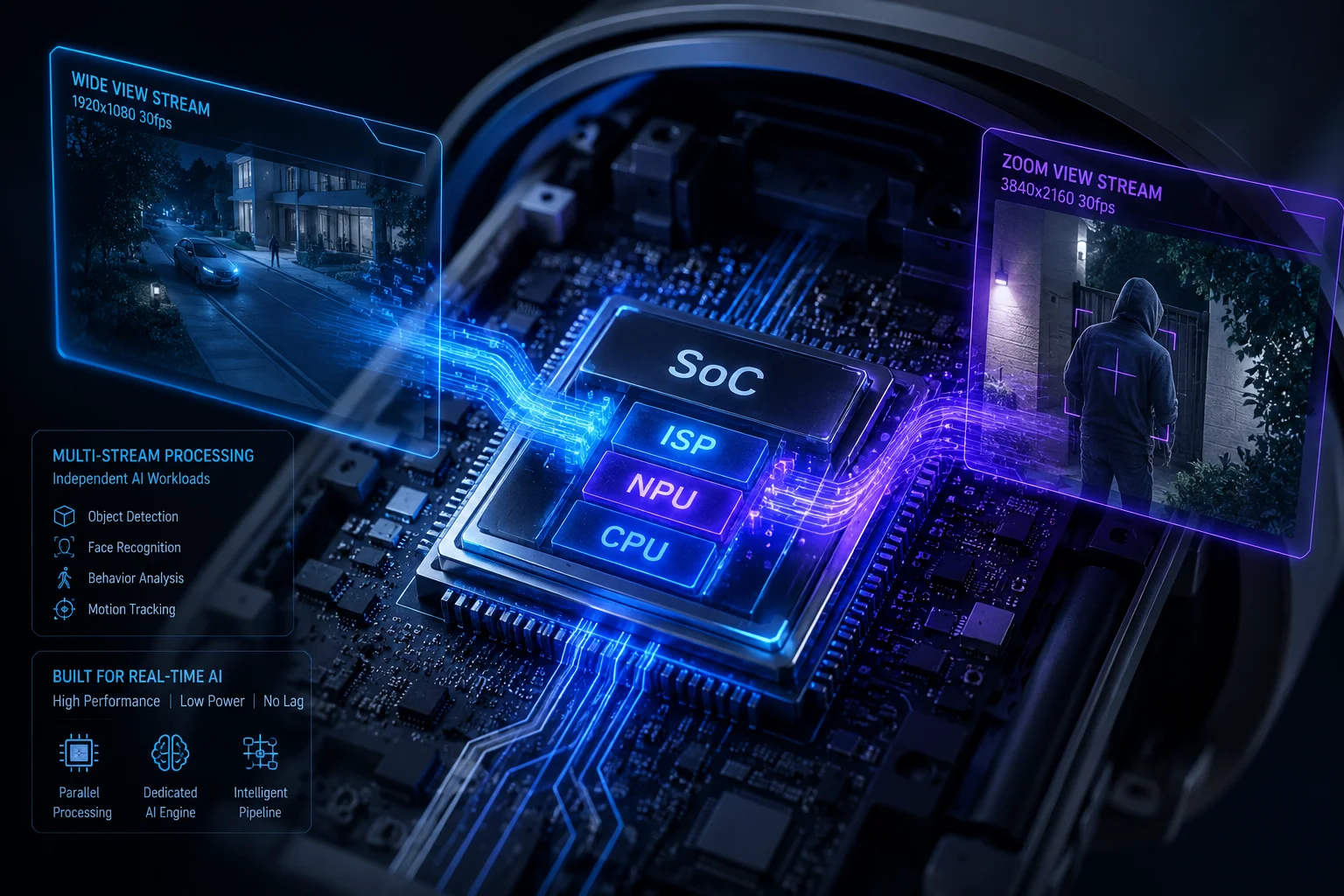
Mir wird oft die Frage gestellt, wie eine Kamera zwei Videostreams gleichzeitig verarbeiten kann, ohne einzufrieren. Die Antwort ist kein Zauber. Es ist eine Mischung aus SoC-Design, NPU4 Stromversorgung und intelligenter Aufgabenverteilung.
Der SoC der Kamera verwaltet beide Streams mithilfe integrierter Hardwareblöcke, insbesondere der NPU und ISP, sodass er gleichzeitig mit geringer Verzögerung die Erkennung auf einem Stream und die Steuerung auf dem anderen Stream durchführen kann.
 SoC Dual-Feed-Verarbeitung
SoC Dual-Feed-Verarbeitung
Ich sehe das als eine kleine Fabrik in der Kamera. Ein Teil liest das Bild. Ein Teil bereinigt es. Ein Teil führt KI aus. Ein anderer Teil kümmert sich um die Bewegungssteuerung. Die Kamera sendet nicht den gesamten Job an einen schwachen CPU-Kern. Sie teilt die Arbeit auf. So hält sie beide Linsen gleichzeitig aktiv.
Wie die Arbeitslast aufgeteilt wird
Bei einer Dual-Objektiv-Verknüpfung5 Kamera, das feste Objektiv erfasst oft eine weite Szene. Das PTZ-Objektiv verfolgt dann das Ziel. Das feste Objektiv erledigt die erste Aufgabe. Es findet die Person oder das Fahrzeug. Das SoC6 nimmt dieses Ergebnis und wandelt es in eine PTZ-Aktion um. Dies kann viele Male pro Sekunde geschehen.
| Kamerablock | Hauptaufgabe | Warum es wichtig ist |
|---|---|---|
| Internetdienstanbieter7 | Verbessert rohe Bilddaten | Hilft der KI, klarere Bilder zu sehen |
| NPU | Führt KI-Erkennungsmodelle aus | Macht lokale Analyse schnell |
| CPU | Verwaltet Steuerlogik | Sendet Tracking-Befehle |
| PTZ-Motorsteuerung | Bewegt das Objektiv | Hält das Ziel zentriert |
Ich denke, diese Aufteilung ist wichtig, weil die Dual-Objektiv-Arbeit nicht nur “zwei Kameras in einer Hülle” ist. Es ist eine Kette von Aufgaben. Wenn ein Teil zu langsam ist, verlangsamt sich die gesamte Kette. Ein guter SoC hält die Kette straff. Er kann Zielerkennung, Koordinatenumrechnung und PTZ-Steuerung8 bewältigen, ohne die Hauptaufgabe an einen entfernten Server zu verlagern.
Warum unabhängige Feeds intelligentes Scheduling benötigen
Ich achte auch auf Bildrate und Ressourcennutzung. Zwei Feeds können eine hohe Last erzeugen. Wenn beide Feeds mit hoher Auflösung und hoher Bildrate laufen, muss der Chip die Arbeit gut planen. Die Kamera kann einen Feed für die Weitbereichserkennung und den anderen für die detaillierte Zoomansicht verwenden. Sie kann auch die KI-Last reduzieren, indem sie nur bei ausgewählten Frames eine vollständige Erkennung durchführt.
Wie ich das Käufern erkläre
Wenn ich mit technischen Käufern wie David Miller spreche, halte ich die Erklärung einfach. Ich sage, dass der SoC der Verkehrsmanager ist. Er verarbeitet nicht nur Videos. Er entscheidet, welche Aufgabe Priorität hat. Er hilft der Kamera, auch bei sich schnell ändernden Szenen die Verfolgung beizubehalten. Deshalb ist ein gutes Hardwaredesign bei einem Dual-Lens-KI-Produkt so wichtig.
Funktioniert die Dual-Lens-Verknüpfung immer noch, wenn die 4G-Netzwerk erreichen9 Verbindung vollständig unterbrochen ist?
Ich weiß, dass dies eine der größten Sorgen bei der Feldeinführung ist. Viele Kunden arbeiten an Orten, an denen das Netzwerk nicht den ganzen Tag stabil ist. Sie wollen keine Kamera, die ausfällt, sobald das Signal abbricht.
Ja, die Dual-Lens-Verknüpfung kann auch bei vollständigem Verlust von 4G weiterhin funktionieren, solange die KI-Logik und die PTZ-Steuerung lokal auf der Kamera gehandhabt werden. Die Verknüpfung benötigt keinen ständigen Cloud-Zugriff, um Ziele weiter zu verfolgen.
 4g verloren Dual-Lens läuft weiter
4g verloren Dual-Lens läuft weiter
Ich möchte diesen Punkt betonen, weil er in realen Projekten wichtig ist. Viele Leute denken, 4G sei das Gehirn des Systems. Das ist es nicht. Bei einer gut konzipierten Edge-Kamera ist 4G nur die Leitung für Fernanzeige, Benachrichtigungen und Plattformdaten. Die eigentliche Verfolgungsentscheidung sollte im Gerät verbleiben. Das hält das System bei einem Netzwerkausfall am Laufen.
Was funktioniert bei Netzwerkausfall weiterhin?
Wenn die Kamera richtig gebaut ist, sollten mehrere Kernfunktionen auch bei vollständigem 4G-Verlust weiterlaufen:
| Funktion | Funktioniert ohne 4G? | Anmerkungen |
|---|---|---|
| Lokale KI-Erkennung | Ja | Läuft in der Kamera |
| Auto-Tracking | Ja | PTZ folgt dem Ziel lokal |
| SD-Kartenaufnahme | Ja | Speichert Videos vor Ort |
| Alarm-Ausgabe | Häufig ja | Abhängig vom Modell-Design |
| Cloud-Live-Ansicht | Nein | Benötigt Netzwerkverbindung |
Ich halte diesen Punkt für sehr wichtig für Bauernhöfe, Standorte und abgelegene Straßen. Diese Orte haben oft eine schwache Abdeckung. Eine Kamera, die auf Cloud-Steuerung angewiesen ist, ist dort zu anfällig. Wenn das Netzwerk ausfällt, sollte das System seine Hauptaufgabe immer noch erfüllen. Sie sollte erkennen, verfolgen und aufzeichnen. Das ist das Grundversprechen von Edge AI.
Warum lokale Autonomie wichtiger ist als Fernsteuerung
Ich denke auch an das Risiko. Wenn eine Kamera die Netzwerkverbindung verliert und auch die Verfolgung, verliert der Kunde sowohl die Sichtbarkeit als auch das Vertrauen. Das ist schlecht für jedes Sicherheitsprojekt. Aber wenn die Kamera selbstständig weiter verfolgt, hat der Standort immer noch Schutz. Der Betreiber kann zwar vorübergehend die Fern-Live-Ansicht verlieren, aber die Kamera wird nicht nutzlos.
Ich sehe das auch als Serviceproblem. Wenn ein abgelegener Standort jedes Mal einen Techniker benötigt, wenn das Netzwerk ausfällt, steigen die Kosten schnell. Der Kunde gibt möglicherweise mehr für Service aus als für die Kamera selbst. Deshalb dränge ich auf lokale Entscheidungsfindung. Das schützt sowohl die Leistung als auch das Budget.
Was ist der Stromverbrauch10 Unterschied, wenn beide Objektive eine KI-Analyse am Edge durchführen?
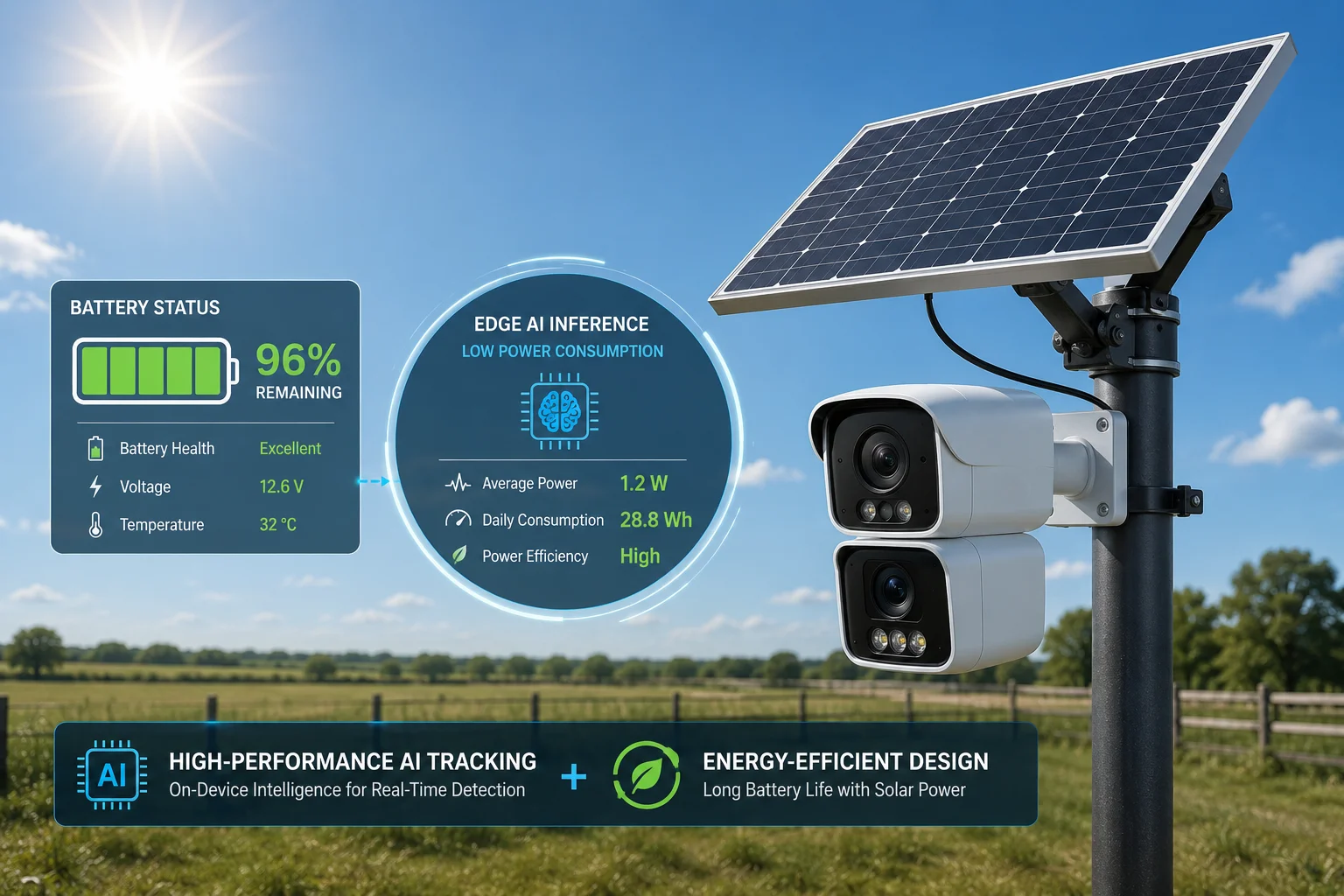
Ich höre oft Kunden fragen, ob Edge AI zu viel Strom verbraucht. Diese Frage ist sehr berechtigt, insbesondere für Solar- und 4G-Systeme. Der Stromverbrauch kann das gesamte Design ausmachen oder brechen.
Wenn beide Objektive KI am Edge ausführen, ist der Stromverbrauch höher als bei der einfachen Aufzeichnung, aber er ist immer noch weitaus effizienter, als Videos zur Analyse an das Backend zu senden. Eine gut konzipierte Kamera verwendet spezielle Chips, um den Energieverbrauch unter Kontrolle zu halten.
 Stromverbrauch Edge AI
Stromverbrauch Edge AI
Ich betrachte den Stromverbrauch praktisch. Die Kamera muss die KI-Last, die Objektivbewegung, Infrarot, 4G-Übertragung und Speicherung ausbalancieren. Wenn das Gerät ein schwaches Design verwendet, entlädt sich der Akku schnell und das Solarpanel kann nicht mithalten. Wenn das Gerät eine gute SoC und intelligente Zeitplanung verwendet, kann es starke KI ausführen, ohne Energie zu verschwenden.
Was treibt den Stromverbrauch in die Höhe
Es gibt einige Hauptgründe, warum der Stromverbrauch steigt, wenn beide Objektive KI ausführen:
| Leistungsfaktor | Auswirkung auf die Nutzung | Einfacher Grund |
|---|---|---|
| KI-Inferenz | Mittel bis hoch | Die NPU arbeitet hart |
| PTZ-Bewegung | Mittel | Motoren benötigen Strom |
| 4G-Übertragung | Mittel | Radio verbraucht Strom, um Daten zu senden |
| Nacht-IR oder Laser | Hoch | Beleuchtung ist teuer im Stromverbrauch |
| Hohe Bildrate | Mittel | Mehr Bilder bedeuten mehr Arbeit |
Ich denke, es hilft, “KI-Strom” von “Systemstrom” zu trennen. KI ist nur ein Teil. In vielen Fällen stammt die größte Belastung von Nachtbeleuchtung und PTZ-Bewegung, nicht vom Erkennungsmodell selbst. Deshalb lege ich so viel Wert auf das gesamte Design, nicht nur auf die Chip-Spezifikation.
Warum Edge AI immer noch die bessere Stromoption sein kann
Ich glaube, Edge AI spart oft mehr Strom als ein Cloud-Setup, da die Kamera nicht ständig schwere Rohvideos streamen muss. Video-Uplink kann kostspielig sein. Die Kamera muss möglicherweise das 4G-Radio länger aktiv halten. Sie benötigt möglicherweise auch höhere Bitrateneinstellungen, um entfernte Server bei der Analyse der Szene zu unterstützen. Das erhöht die Last.
Mit Edge AI kann die Kamera bei Bedarf nur Ereignisse, Metadaten und kurze Clips senden. Dies reduziert den Datenverbrauch und oft die gesamte Systemarbeit. Für Solarprojekte ist das eine große Sache. Ein kleineres und intelligenteres Strombudget kann weniger Batterieprobleme und weniger Kaltstartfehler nach schlechtem Wetter bedeuten.
Wie ich Käufer bei diesem Punkt berate
Wenn ich mit Käufern über Strom spreche, stelle ich drei einfache Fragen. Hat der Standort eine stabile Stromversorgung? Benötigt er eine Vollzeitverfolgung? Benötigt er auch Nacht-KI? Wenn die Antwort auf alle drei Ja lautet, empfehle ich ein Modell mit einem starken Batterieplan, einem ordnungsgemäßen Solar-Setup11, und einem Kamera-SoC, der für kontinuierliche Edge-Arbeit ausgelegt ist. Ich empfehle kein Raten. Ich empfehle, die tatsächliche Feldlast zu messen.
Schlussfolgerung
Ich behandle Dual-Lens-Verknüpfung zuerst als Edge-Aufgabe, da lokale KI eine schnellere Verfolgung, eine bessere Betriebszeit und eine sicherere Feldinstallation ermöglicht.
1. Erforschen Sie, wie die automatische Verfolgung in PTZ-Kameras funktioniert, um sich bewegende Ziele zu verfolgen. ︎↩︎ 2. Verstehen Sie die Kompromisse zwischen Cloud-basierter Videoanalyse und lokaler Verarbeitung. ︎↩︎ 3. Entdecken Sie, wie hybride Edge-Cloud-Architekturen Leistung und Skalierbarkeit ausbalancieren. ︎↩︎ 4. Entdecken Sie, wie Neural Processing Units die KI-Inferenz auf Edge-Geräten beschleunigen. ︎↩︎ 5. Verstehen Sie das Konzept von Dual-Kamera-Systemen für Sicherheit und Überwachung. ︎↩︎ 6. Erfahren Sie, wie System-on-Chip mehrere Verarbeitungseinheiten für Kamera-KI integriert. ︎↩︎ 7. Verstehen Sie die Rolle von Bildsignalprozessoren bei der Verbesserung der Videoqualität für KI. ︎↩︎ 8. Erfahren Sie mehr über Pan-Tilt-Zoom-Kamerasteuerungsmechanismen und ihre Anwendungen. ︎↩︎ 9. Verstehen Sie 4G-Mobilfunknetze und ihre Rolle bei der Fernverbindung von Kameras. ︎↩︎ 10. Erfahren Sie mehr über Faktoren, die den Stromverbrauch von Edge-KI-Geräten beeinflussen. ︎↩︎ 11. Verstehen Sie, wie Solaranlagen ferngesteuerte Kamerainstallationen unterstützen. ︎↩︎