
J'ai vu de nombreux projets ralentir parce qu'ils plaçaient le suivi intelligent au mauvais endroit. Dans mon travail, je cherche toujours le chemin le plus rapide vers un suivi stable.
Pour la liaison double objectif, le calcul IA est généralement géré en périphérie (Edge), à l'intérieur de la caméra elle-même, et non en arrière-plan (Backend). Cela permet une réponse plus rapide, un délai plus faible et une meilleure stabilité lorsque le réseau est faible ou complètement perdu.
 double objectif ia périphérie arrière-plan
double objectif ia périphérie arrière-plan
J'explique souvent cela aux intégrateurs de systèmes qui travaillent dans les fermes, les chantiers de construction et les cours éloignées. La vraie question n'est pas seulement où l'IA s'exécute. La vraie question est de savoir si la caméra peut réagir assez rapidement lorsqu'une cible bouge.
Table des matières
La liaison basée sur la périphérie (Edge) assure-t-elle un temps de réponse plus rapide pour suivi automatique1 qu'une configuration basée sur le cloud2?
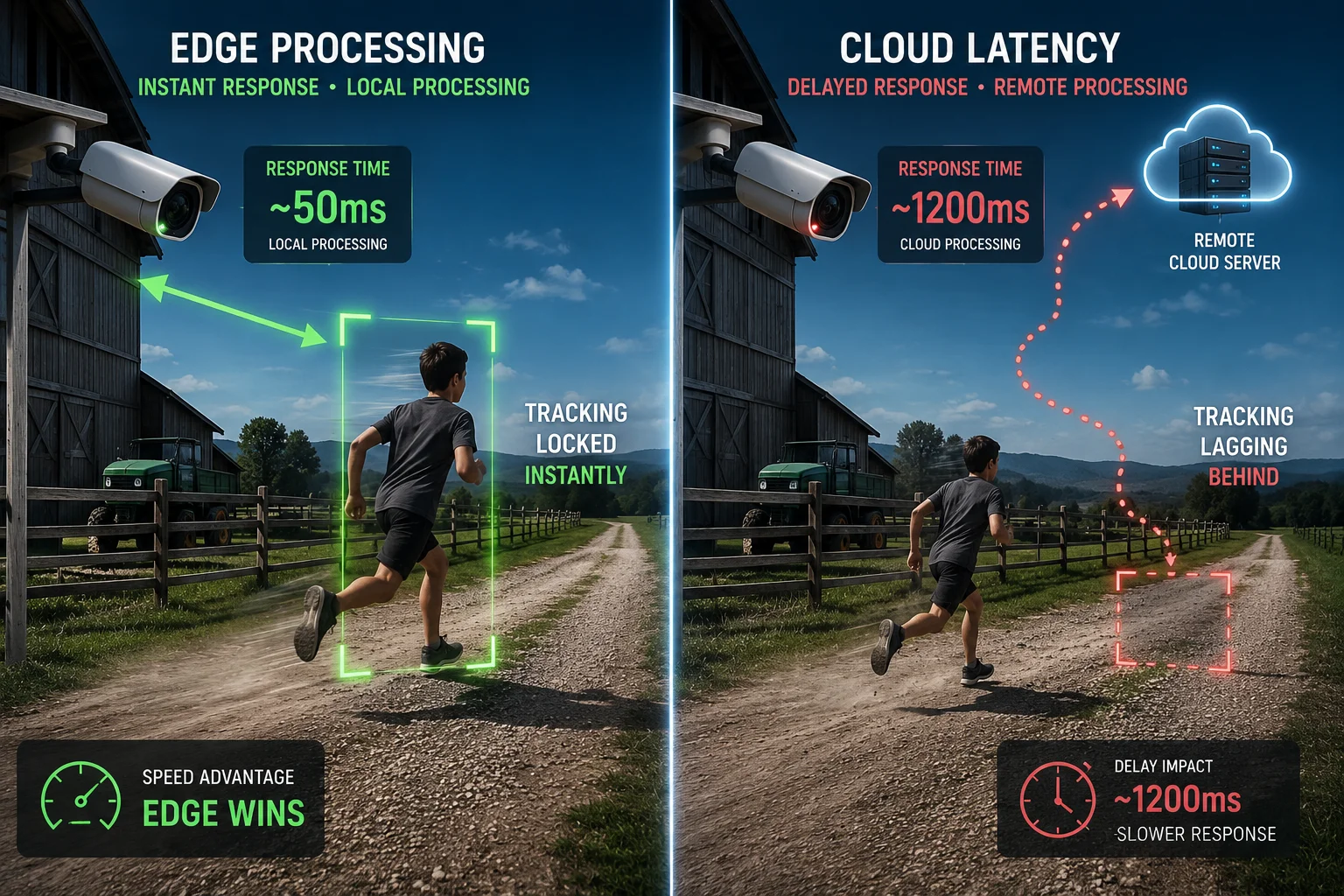
J'ai appris que le délai est la première chose qui casse l'autotraitement. Si la caméra attend le retour du cloud, la cible peut s'éloigner avant même que le PTZ ne commence à tourner.
Oui, la liaison basée sur la périphérie (Edge) est beaucoup plus rapide qu'une configuration basée sur le cloud pour l'autotraitement. La caméra traite la cible localement, elle peut donc envoyer des commandes PTZ en temps réel sans attendre les allers-retours réseau.
 périphérie vs cloud autotraitement
périphérie vs cloud autotraitement
J'aime penser à cela comme une course entre la réaction locale et le contrôle à distance. La périphérie (Edge) voit la cible, prend la décision et déplace le PTZ à l'intérieur du même appareil. Un système cloud doit envoyer la vidéo vers le haut, attendre l'analyse, puis récupérer la commande vers le bas. Ce chemin supplémentaire ajoute un décalage. Dans un réseau de bureau normal, ce décalage peut sembler faible sur le papier. Sur le terrain, il semble souvent beaucoup plus important.
Pourquoi le traitement local est si important
Je travaille avec des clients qui se soucient des résultats réels, pas seulement des fiches techniques. Ils veulent que la caméra suive une personne qui marche, une voiture qui entre dans un portail ou un travailleur qui traverse une cour. Une configuration basée sur le cloud peut être suffisante pour la révision et le stockage, mais elle est faible pour le contrôle en direct. Si le réseau est occupé, la caméra peut manquer le moment.
| Méthode de suivi | Où l'IA s'exécute | Vitesse de réponse | Meilleur cas d'utilisation |
|---|---|---|---|
| Liaison Edge | Dans la caméra | Très rapide | Suivi automatique en direct |
| Liaison Cloud | Serveur distant | Plus lent | Historique, rapports, contrôle central |
| Configuration hybride3 | Edge et Backend | Équilibré | Grands projets aux besoins mixtes |
Je vois aussi une raison commerciale claire ici. Un client qui paie pour une caméra veut que la caméra fonctionne en périphérie du site, pas seulement lorsque l'internet est parfait. Si la cible se déplace rapidement, même un court délai peut nuire au résultat. C'est pourquoi je considère le calcul Edge comme la couche de base pour la liaison double objectif.
Pourquoi le délai du cloud devient un vrai problème sur le terrain
J'ai traité des sites où le réseau semblait bon au bureau, mais échouait sur le terrain. Un signal 4G peut fluctuer. Il peut également souffrir de pertes de paquets, de la charge de la tour et de problèmes météorologiques. Lorsque cela se produit, le suivi dans le cloud commence à sembler lent et instable. Le PTZ peut dépasser la cible. Il peut corriger tardivement. Il peut même perdre la cible après une courte pause.
Je sais aussi que de nombreux acheteurs utilisent le suivi automatique pour réduire les coûts de main-d'œuvre. Ils veulent que la caméra suive le sujet par elle-même, afin de ne pas avoir besoin d'un gardien pour déplacer la vue toute la journée. Si le suivi réagit tardivement, la valeur de l'ensemble du système diminue. C'est pourquoi je place toujours le cerveau de suivi à l'intérieur du boîtier de la caméra lorsque je conçois pour ces cas d'utilisation.
Comment le SoC de la caméra gère-t-il le traitement IA simultané de deux flux vidéo indépendants ?
On me demande souvent comment une caméra peut traiter deux flux vidéo en même temps sans geler. La réponse n'est pas magique. C'est un mélange de conception SoC, NPU4 d'alimentation et de répartition intelligente des tâches.
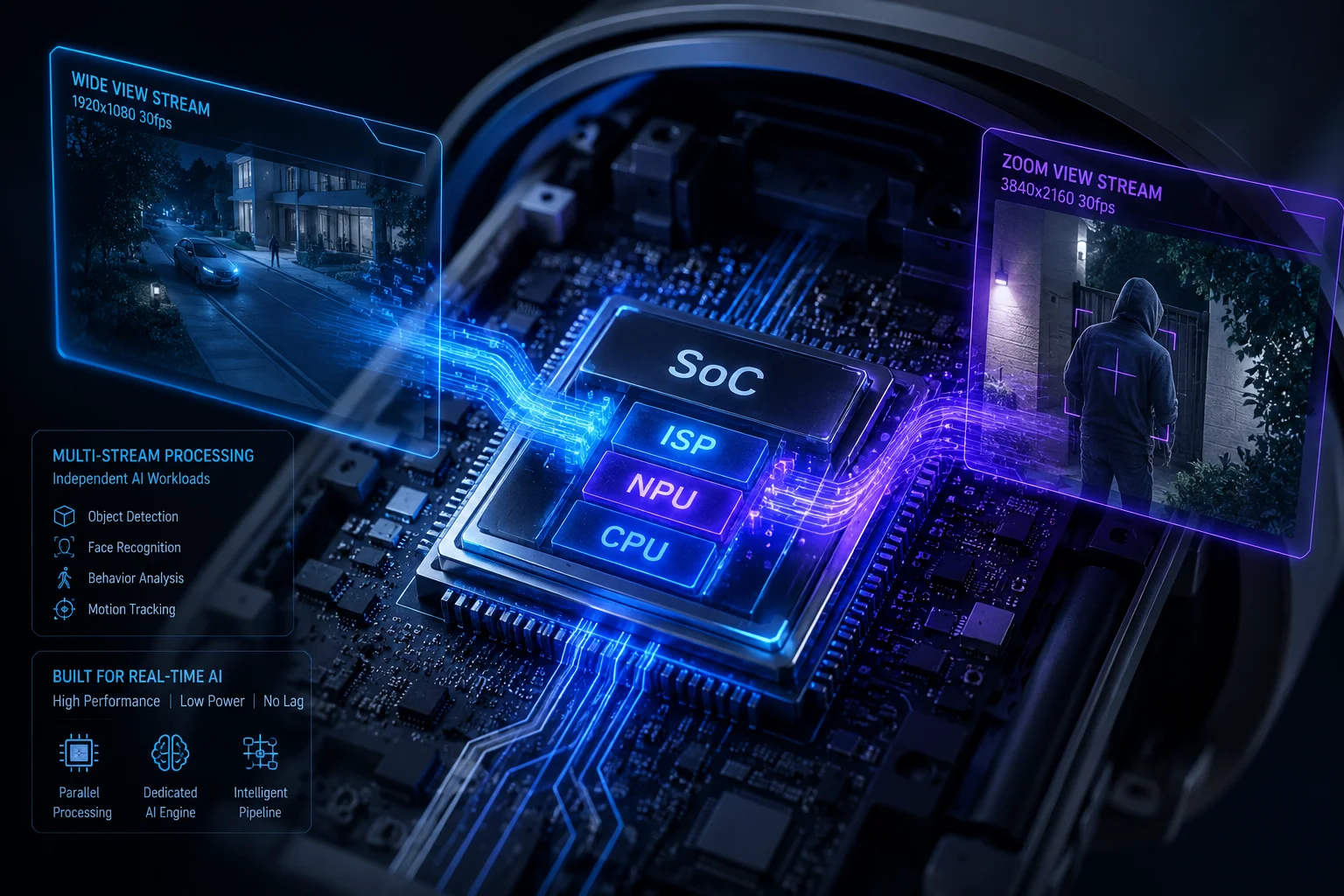
Le SoC de la caméra gère les deux flux en utilisant des blocs matériels intégrés, en particulier le NPU et l'ISP, de sorte qu'il peut exécuter la détection sur un flux et le contrôle sur l'autre flux en même temps avec un faible délai.
 traitement double flux soc
traitement double flux soc
Je vois cela comme une petite usine à l'intérieur de la caméra. Une partie lit l'image. Une partie la nettoie. Une partie exécute l'IA. Une autre partie gère le contrôle de mouvement. La caméra n'envoie pas tout le travail à un seul cœur CPU faible. Elle divise le travail. C'est ainsi qu'elle maintient les deux objectifs actifs simultanément.
Comment la charge de travail est répartie
Dans un liaison double objectif5 caméra, l'objectif fixe surveille souvent une scène large. L'objectif PTZ suit ensuite la cible. L'objectif fixe fait le premier travail. Il trouve la personne ou le véhicule. Le SoC6 prend ce résultat et le transforme en une action PTZ. Cela peut se produire plusieurs fois par seconde.
| Bloc Caméra | Travail Principal | Pourquoi c'est important |
|---|---|---|
| FAI7 | Améliore les données brutes de l'image | Aide l'IA à voir des images plus claires |
| NPU | Exécute les modèles de détection IA | Rend l'analyse locale rapide |
| Processeur | Gère la logique de contrôle | Envoie les commandes de suivi |
| Contrôle du moteur PTZ | Déplace l'objectif | Maintient la cible centrée |
Je pense que cette répartition est importante car le travail à double objectif n'est pas juste “ deux caméras dans un seul boîtier ”. C'est une chaîne de tâches. Si une partie est trop lente, toute la chaîne ralentit. Un bon SoC maintient la chaîne serrée. Il peut gérer la détection de cible, la conversion de coordonnées et contrôle PTZ8 sans pousser le travail principal vers un serveur distant.
Pourquoi les flux indépendants nécessitent une planification intelligente
Je fais également attention au taux de rafraîchissement et à l'utilisation des ressources. Deux flux peuvent créer une charge importante. Si les deux flux fonctionnent à haute résolution et à haute fréquence d'images, la puce doit bien planifier le travail. La caméra peut utiliser un flux pour la détection de scène large et l'autre pour une vue zoom détaillée. Elle peut également réduire la charge de l'IA en n'exécutant la détection complète que sur des images sélectionnées.
Comment j'explique cela aux acheteurs
Lorsque je parle à des acheteurs techniques comme David Miller, je garde l'explication simple. Je dis que le SoC est le gestionnaire de trafic. Il ne se contente pas de traiter la vidéo. Il décide quelle tâche a la priorité. Il aide la caméra à continuer de suivre même lorsque la scène change rapidement. C'est pourquoi une bonne conception matérielle est si importante dans un produit IA à double objectif.
Le lien à double objectif fonctionnera-t-il toujours si la réseau 4G9 connexion est complètement perdue ?
Je sais que c'est l'une des plus grandes préoccupations pour le déploiement sur le terrain. De nombreux clients travaillent dans des endroits où le réseau n'est pas stable toute la journée. Ils ne veulent pas d'une caméra qui tombe en panne au moment où le signal chute.
Oui, le lien à double objectif peut toujours fonctionner si la 4G est complètement perdue, tant que la logique IA et le contrôle PTZ sont gérés localement sur la caméra. Le lien n'a pas besoin d'un accès cloud constant pour continuer à suivre les cibles.
 4g perdue double objectif continue
4g perdue double objectif continue
Je veux insister sur ce point car il est important dans les projets réels. Beaucoup de gens pensent que la 4G est le cerveau du système. Ce n'est pas le cas. Dans une caméra Edge bien conçue, la 4G n'est que le canal pour la visualisation à distance, les alertes et les données de la plateforme. La décision de suivi réelle doit rester à l'intérieur de l'appareil. C'est ce qui maintient le système en vie pendant une panne de réseau.
Ce qui fonctionne toujours lorsque le réseau tombe
Si la caméra est bien construite, plusieurs fonctions principales devraient continuer pendant une perte totale de 4G :
| Fonction | Fonctionne sans 4G ? | Notes |
|---|---|---|
| Détection IA locale | Oui | S'exécute à l'intérieur de la caméra |
| Suivi automatique | Oui | PTZ suit la cible localement |
| sur carte SD | Oui | Sauvegarde la vidéo sur site |
| Sortie d'alarme | Souvent oui | Dépend de la conception du modèle |
| Vue en direct sur le cloud | Non | Nécessite une connexion réseau |
Je trouve ce point très important pour les fermes, les sites et les routes isolées. Ces endroits ont souvent une couverture faible. Une caméra qui dépend du contrôle cloud y est trop fragile. Si le réseau tombe, le système devrait quand même faire son travail principal. Il devrait détecter, suivre et enregistrer. C'est la promesse fondamentale de l'IA en périphérie (Edge AI).
Pourquoi l'autonomie locale est plus importante que le contrôle à distance
Je pense aussi au risque. Si une caméra perd le réseau et perd aussi le suivi, alors le client perd à la fois la visibilité et la confiance. C'est mauvais pour tout projet de sécurité. Mais si la caméra continue de suivre par elle-même, le site est toujours protégé. L'opérateur peut perdre la vue en direct à distance pendant un certain temps, mais la caméra ne devient pas inutile.
Je vois aussi cela comme un problème de service. Si un site distant nécessite une intervention sur site chaque fois que le réseau tombe, le coût augmente rapidement. Le client peut dépenser plus en service qu'en caméra elle-même. C'est pourquoi je plaide pour la prise de décision locale. Cela protège à la fois les performances et le budget.
Quelle est la consommation d'énergie10 différence lorsque les deux objectifs effectuent une analyse IA en périphérie ?
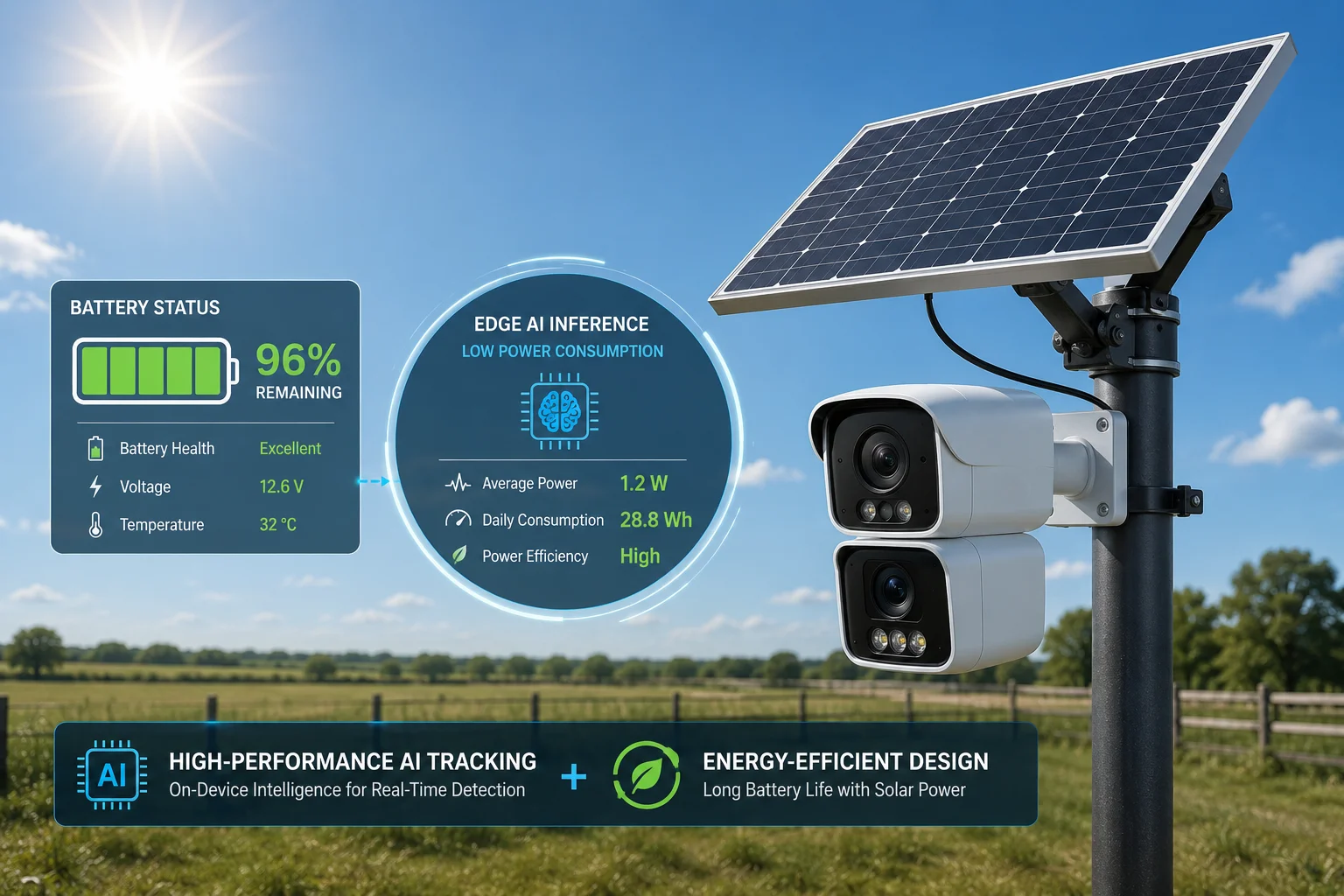
J'entends souvent les clients demander si l'IA en périphérie consommera trop d'énergie. Cette question est très juste, surtout pour les systèmes solaires et 4G. La consommation d'énergie peut faire ou défaire toute la conception.
Lorsque les deux objectifs exécutent l'IA en périphérie, la consommation d'énergie est plus élevée que pour un simple enregistrement, mais elle est toujours beaucoup plus efficace que l'envoi de vidéos lourdes vers le backend pour analyse. Une caméra bien conçue utilise des puces dédiées pour maîtriser la consommation d'énergie.
 consommation d'énergie ia en périphérie
consommation d'énergie ia en périphérie
Je considère la consommation d'énergie d'un point de vue pratique. La caméra doit équilibrer la charge de l'IA, le mouvement de l'objectif, l'infrarouge, la transmission 4G et le stockage. Si l'appareil utilise une conception faible, la batterie se vide rapidement et le panneau solaire ne peut pas suivre. Si l'appareil utilise un bon SoC et une planification intelligente, il peut exécuter une IA performante sans gaspiller d'énergie.
Ce qui augmente la consommation d'énergie
Il y a quelques raisons principales pour lesquelles la consommation d'énergie augmente lorsque les deux objectifs exécutent l'IA :
| Facteur de puissance | Effet sur l'utilisation | Raison simple |
|---|---|---|
| Inférence IA | Moyen à élevé | Le NPU travaille dur |
| Mouvement PTZ | Moyen | 1. Les moteurs ont besoin de courant |
| 2. Transmission 4G | Moyen | 3. La radio utilise de l'énergie pour envoyer des données |
| 4. IR ou laser de nuit | Haut | 5. L'éclairage coûte cher en énergie |
| 6. Fréquence d'images élevée | Moyen | 7. Plus d'images signifient plus de travail |
8. Je pense qu'il est utile de séparer la “ puissance de l'IA ” de la “ puissance du système ”. L'IA n'est qu'une partie. Dans de nombreux cas, la plus grande consommation provient de l'éclairage nocturne et du mouvement PTZ, et non du modèle de détection lui-même. C'est pourquoi je m'intéresse autant à la conception complète, pas seulement aux spécifications de la puce.
9. Pourquoi l'IA Edge peut toujours être le meilleur choix en termes de consommation d'énergie
10. Je pense que l'IA Edge permet souvent d'économiser plus d'énergie qu'une configuration cloud, car la caméra n'a pas besoin de diffuser en continu de la vidéo brute lourde tout le temps. Le téléchargement vidéo peut être coûteux. La caméra peut avoir besoin de maintenir la radio 4G active plus longtemps. Elle peut également nécessiter des paramètres de débit binaire plus élevés pour aider les serveurs distants à analyser la scène. Cela ajoute de la charge.
11. Avec l'IA Edge, la caméra peut envoyer uniquement des événements, des métadonnées et de courts clips lorsque nécessaire. Cela réduit l'utilisation des données et souvent le travail total du système. Pour les projets solaires, c'est une affaire importante. Un budget d'énergie plus petit et plus intelligent peut signifier moins de problèmes de batterie et moins de pannes au démarrage à froid après un mauvais temps.
12. Comment je guide les acheteurs sur ce point
13. Lorsque je discute de l'énergie avec les acheteurs, je pose trois questions simples. Le site dispose-t-il d'une alimentation stable ? A-t-il besoin d'un suivi à temps plein ? A-t-il également besoin de l'IA de nuit ? Si la réponse est oui à toutes les trois, alors je recommande un modèle avec un plan de batterie solide, une configuration solaire appropriée 14. , et un SoC de caméra conçu pour un travail Edge continu. Je ne recommande pas de deviner. Je recommande de mesurer la charge réelle sur le terrain.11, 15. Je traite la liaison double objectif comme une tâche Edge d'abord, car l'IA locale offre un suivi plus rapide, une meilleure disponibilité et un déploiement plus sûr sur le terrain.
Conclusion
16. 1. Explorez comment le suivi automatique fonctionne dans les caméras PTZ pour suivre les cibles en mouvement.
17. 2. Comprenez les compromis entre l'analyse vidéo basée sur le cloud et le traitement local. ︎↩︎ 18. 3. Découvrez comment les architectures hybrides edge-cloud équilibrent performance et évolutivité. ︎↩︎ 19. 4. Découvrez comment les unités de traitement neuronal accélèrent l'inférence de l'IA dans les appareils Edge. ︎↩︎ 4. Découvrez comment les unités de traitement neuronal accélèrent l'inférence de l'IA dans les appareils périphériques. ︎↩︎ 5. Comprendre le concept des systèmes de caméras à double objectif pour la sécurité et la surveillance. ︎↩︎ 6. Apprendre comment le System-on-Chip intègre plusieurs unités de traitement pour l'IA des caméras. ︎↩︎ 7. Comprendre le rôle des processeurs de signal d'image dans l'amélioration de la qualité vidéo pour l'IA. ︎↩︎ 8. Apprendre les mécanismes de contrôle des caméras Pan-Tilt-Zoom et leurs applications. ︎↩︎ 9. Comprendre les réseaux cellulaires 4G et leur rôle dans la connectivité des caméras à distance. ︎↩︎ 10. Apprendre les facteurs affectant la consommation d'énergie dans les appareils d'IA en périphérie. ︎↩︎ 11. Comprendre comment les systèmes d'énergie solaire prennent en charge les installations de caméras à distance. ︎↩︎