
Ho visto molti progetti rallentare perché hanno posizionato il tracciamento intelligente nel posto sbagliato. Nel mio lavoro, cerco sempre il percorso più veloce per un tracciamento stabile.
Per il collegamento a doppio obiettivo, l'elaborazione AI viene solitamente gestita sull'Edge, all'interno della telecamera stessa, non sul Backend. Ciò garantisce una risposta più rapida, un ritardo inferiore e una migliore stabilità quando la rete è debole o completamente persa.
 backend edge ai a doppio obiettivo
backend edge ai a doppio obiettivo
Spiego spesso questo ai system integrator che lavorano in fattorie, cantieri edili e cortili remoti. La vera domanda non è solo dove viene eseguita l'AI. La vera domanda è se la telecamera può reagire abbastanza velocemente quando un bersaglio si muove.
Indice dei contenuti
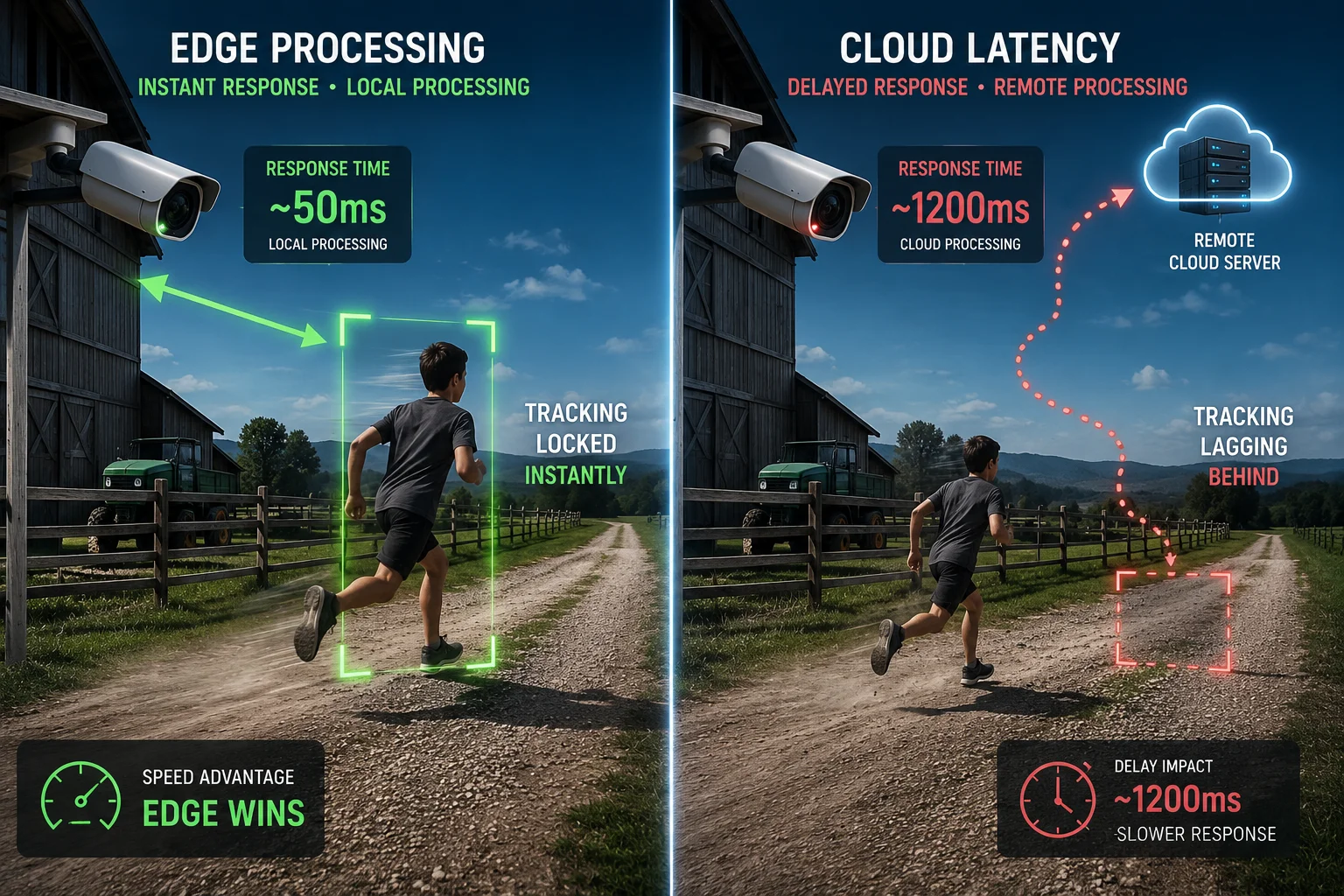
Il collegamento basato sull'Edge garantisce un tempo di risposta più rapido per tracciamento automatico1 di un configurazione basata sul cloud2?
Ho imparato che il ritardo è la prima cosa che rompe l'auto-tracking. Se la telecamera attende il feedback dal cloud, il bersaglio può allontanarsi prima ancora che la PTZ inizi a girare.
Sì, il collegamento basato sull'Edge è molto più veloce di una configurazione basata sul cloud per l'auto-tracking. La telecamera elabora il bersaglio localmente, quindi può inviare comandi PTZ in tempo reale senza attendere i viaggi di andata e ritorno della rete.
 tracciamento automatico edge vs cloud
tracciamento automatico edge vs cloud
Mi piace pensare a questo come a una gara tra reazione locale e controllo remoto. L'Edge vede il bersaglio, prende la decisione e muove la PTZ all'interno dello stesso dispositivo. Un sistema cloud deve inviare il video, attendere l'analisi e quindi ricevere il comando indietro. Quel percorso aggiuntivo aggiunge ritardo. In una normale rete d'ufficio, quel ritardo può sembrare piccolo sulla carta. Sul campo, spesso sembra molto più grande.
Perché l'elaborazione locale è così importante
Lavoro con clienti che si preoccupano dei risultati reali, non solo delle schede tecniche. Vogliono che la telecamera tenga il passo con una persona che cammina, un'auto che entra in un cancello o un operaio che si muove attraverso un cortile. Una configurazione basata sul cloud può andare bene per la revisione e l'archiviazione, ma è debole per il controllo dal vivo. Se la rete è occupata, la telecamera può perdere il momento.
| Metodo di tracciamento | Dove viene eseguita l'AI | Velocità di risposta | Il miglior caso d'uso |
|---|---|---|---|
| Collegamento Edge | All'interno della telecamera | Molto veloce | Tracciamento automatico in tempo reale |
| Collegamento Cloud | Server remoto | Più lento | Cronologia, report, controllo centrale |
| Configurazione ibrida3 | Sia Edge che Backend | Bilanciato | Grandi progetti con esigenze miste |
Vedo anche una chiara ragione commerciale qui. Un cliente che paga per una telecamera vuole che la telecamera funzioni al limite del sito, non solo quando Internet è perfetto. Se il bersaglio si muove velocemente, anche un breve ritardo può compromettere il risultato. Ecco perché considero l'Edge compute come lo strato di base per il collegamento a doppia lente.
Perché il ritardo del cloud diventa un vero problema sul campo
Ho gestito siti in cui la rete sembrava a posto in ufficio, ma falliva sul campo. Un segnale 4G può oscillare su e giù. Può anche soffrire di perdita di pacchetti, carico della torre e problemi meteorologici. Quando ciò accade, il tracciamento cloud inizia a sembrare lento e instabile. La PTZ potrebbe superare il bersaglio. Potrebbe correggere in ritardo. Potrebbe persino perdere il bersaglio dopo una breve pausa.
So anche che molti acquirenti utilizzano il tracciamento automatico per ridurre i costi di manodopera. Vogliono che la telecamera segua il soggetto da sola, in modo da non aver bisogno di una guardia per muovere la visuale tutto il giorno. Se il tracciamento reagisce in ritardo, il valore dell'intero sistema diminuisce. Ecco perché posiziono sempre il cervello di tracciamento all'interno del corpo della telecamera quando progetto per questi casi d'uso.
Come gestisce il SoC della telecamera l'elaborazione AI simultanea di due flussi video indipendenti?
Mi viene spesso chiesto come una telecamera possa elaborare due flussi video contemporaneamente senza bloccarsi. La risposta non è magia. È un mix di progettazione SoC, NPU4 alimentazione e divisione intelligente dei compiti.
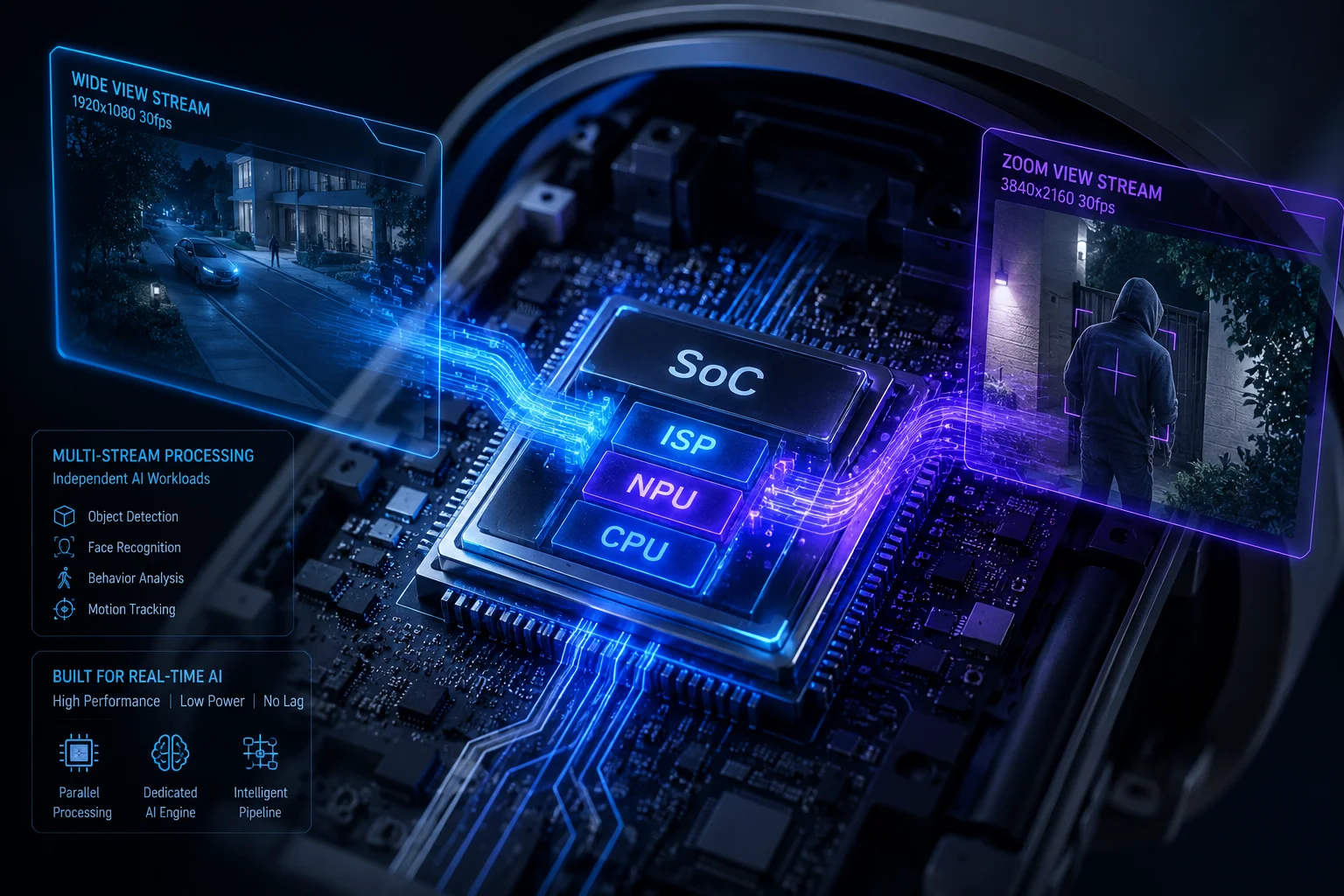
Il SoC della telecamera gestisce entrambi i flussi utilizzando blocchi hardware integrati, in particolare NPU e ISP, in modo da poter eseguire il rilevamento su uno stream e il controllo sull'altro stream contemporaneamente con basso ritardo.
 elaborazione dual feed soc
elaborazione dual feed soc
La vedo come una piccola fabbrica all'interno della telecamera. Una parte legge l'immagine. Una parte la pulisce. Una parte esegue l'AI. Un'altra parte gestisce il controllo del movimento. La telecamera non invia l'intero lavoro a un singolo core CPU debole. Divide il lavoro. È così che mantiene attive entrambe le lenti contemporaneamente.
Come viene suddiviso il carico di lavoro
In una collegamento a doppio obiettivo5 telecamera, l'obiettivo fisso osserva spesso una scena ampia. L'obiettivo PTZ segue quindi il bersaglio. L'obiettivo fisso svolge il primo compito. Trova la persona o il veicolo. Il SoC6 prende quel risultato e lo trasforma in un'azione PTZ. Questo può accadere molte volte al secondo.
| Blocco telecamera | Compito principale | Perché è importante |
|---|---|---|
| ISP7 | Migliora i dati grezzi dell'immagine | Aiuta l'IA a vedere fotogrammi più chiari |
| NPU | Esegue modelli di rilevamento IA | Rende veloce l'analisi locale |
| CPU | Gestisce la logica di controllo | Invia comandi di tracciamento |
| Controllo motore PTZ | Muove l'obiettivo | Mantiene il bersaglio centrato |
Penso che questa suddivisione sia importante perché il lavoro a doppio obiettivo non è solo “due telecamere in un unico chassis”. È una catena di compiti. Se una parte è troppo lenta, l'intera catena rallenta. Un buon SoC mantiene la catena stretta. Può gestire il rilevamento del bersaglio, la conversione delle coordinate e controllo PTZ8 senza spingere il lavoro principale su un server remoto.
Perché i feed indipendenti necessitano di una pianificazione intelligente
Presto attenzione anche alla frequenza dei fotogrammi e all'uso delle risorse. Due feed possono creare un carico pesante. Se entrambi i feed funzionano a risoluzione elevata e frequenza dei fotogrammi elevata, il chip deve pianificare bene il lavoro. La telecamera può utilizzare un feed per il rilevamento di scene ampie e l'altro per una vista zoom dettagliata. Può anche ridurre il carico dell'IA eseguendo il rilevamento completo solo su fotogrammi selezionati.
Come spiego questo agli acquirenti
Quando parlo con acquirenti tecnici come David Miller, mantengo la spiegazione semplice. Dico che il SoC è il gestore del traffico. Non elabora solo video. Decide quale attività ha la priorità. Aiuta la fotocamera a continuare a tracciare anche quando la scena cambia rapidamente. Ecco perché un buon design hardware è così importante in un prodotto AI dual-lens.
Il collegamento dual-lens funzionerà ancora se il rete 4G9 la connessione viene persa completamente?
So che questa è una delle maggiori preoccupazioni per l'implementazione sul campo. Molti clienti lavorano in luoghi dove la rete non è stabile tutto il giorno. Non vogliono una fotocamera che si guasti nel momento in cui il segnale cade.
Sì, il collegamento dual-lens può ancora funzionare se il 4G viene perso completamente, purché la logica AI e il controllo PTZ siano gestiti localmente sulla fotocamera. Il collegamento non necessita di un accesso costante al cloud per continuare a tracciare i bersagli.
 4g perso dual lens continua
4g perso dual lens continua
Voglio sottolineare questo punto perché è importante nei progetti reali. Molte persone pensano che il 4G sia il cervello del sistema. Non lo è. In una fotocamera Edge ben progettata, il 4G è solo il canale per la visualizzazione remota, gli avvisi e i dati della piattaforma. La decisione effettiva di tracciamento dovrebbe rimanere all'interno del dispositivo. Questo è ciò che mantiene vivo il sistema durante un'interruzione di rete.
Cosa funziona ancora quando la rete cade
Se la fotocamera è costruita correttamente, diverse funzioni principali dovrebbero continuare durante una perdita totale del 4G:
| Funzione | Funziona senza 4G? | Note |
|---|---|---|
| Rilevamento AI locale | Sì | Esegue all'interno della fotocamera |
| Tracciamento automatico | Sì | PTZ segue il bersaglio localmente |
| registrazione su scheda SD | Sì | Salva video in loco |
| Uscita allarme | Spesso sì | Dipende dal design del modello |
| Visualizzazione live su cloud | No | Necessita di connessione di rete |
Trovo questo punto molto importante per fattorie, siti e strade remote. Questi luoghi hanno spesso una copertura debole. Una telecamera che dipende dal controllo cloud è troppo fragile lì. Se la rete cade, il sistema dovrebbe comunque svolgere il suo compito principale. Dovrebbe rilevare, seguire e registrare. Questa è la promessa di base dell'Edge AI.
Perché l'autonomia locale è più importante del controllo remoto
Penso anche al rischio. Se una telecamera perde la rete e anche il tracciamento, il cliente perde sia la visibilità che la fiducia. Questo è negativo per qualsiasi progetto di sicurezza. Ma se la telecamera continua a tracciare da sola, il sito ha ancora protezione. L'operatore potrebbe perdere la visualizzazione live remota per un po', ma la telecamera non diventa inutile.
Vedo anche questo come un problema di servizio. Se un sito remoto necessita di un intervento tecnico ogni volta che la rete cade, i costi aumentano rapidamente. Il cliente potrebbe spendere di più in assistenza che nella telecamera stessa. Ecco perché spingo per il processo decisionale locale. Protegge sia le prestazioni che il budget.
Qual è il consumo energetico10 differenza quando entrambe le lenti eseguono l'analisi AI sull'Edge?
Sento spesso i clienti chiedere se l'Edge AI consumerà troppa energia. Questa domanda è molto legittima, specialmente per i sistemi solari e 4G. Il consumo energetico può fare o rompere l'intero progetto.
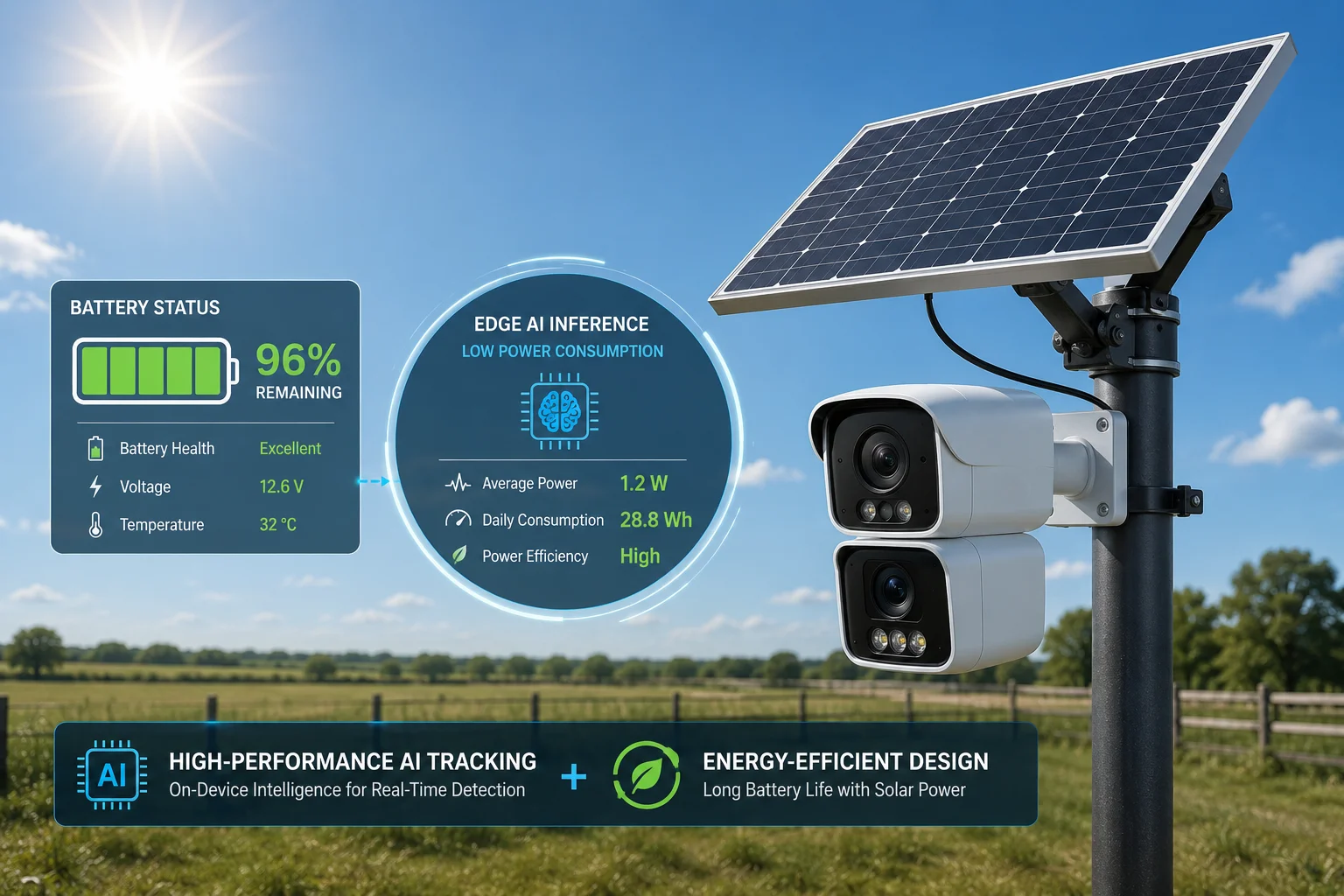
Quando entrambe le lenti eseguono l'AI sull'Edge, il consumo energetico è più elevato rispetto alla semplice registrazione, ma è comunque molto più efficiente rispetto all'invio di video pesanti al Backend per l'analisi. Una telecamera ben progettata utilizza chip dedicati per mantenere sotto controllo il consumo energetico.
 consumo energetico edge ai
consumo energetico edge ai
Guardo al consumo energetico in modo pratico. La telecamera deve bilanciare il carico AI, il movimento delle lenti, l'infrarosso, la trasmissione 4G e l'archiviazione. Se il dispositivo utilizza un design debole, la batteria si scarica rapidamente e il pannello solare non riesce a tenere il passo. Se il dispositivo utilizza un buon SoC e una pianificazione intelligente, può eseguire un'AI potente senza sprecare energia.
Cosa aumenta il consumo energetico
Ci sono alcuni motivi principali per cui il consumo energetico aumenta quando entrambe le lenti eseguono l'AI:
| Fattore di potenza | Effetto sull'uso | Ragione semplice |
|---|---|---|
| Inferenza AI | Medio-alto | L'NPU lavora sodo |
| Movimento PTZ | Medio | I motori hanno bisogno di corrente |
| Trasmissione 4G | Medio | La radio usa energia per inviare dati |
| IR notturno o laser | Alto | L'illuminazione è costosa in termini di energia |
| Frequenza fotogrammi elevata | Medio | Più fotogrammi significano più lavoro |
Penso che aiuti a separare l“”energia AI“ dall”"energia di sistema". L'AI è solo una parte. In molti casi, il maggiore consumo proviene dall'illuminazione notturna e dal movimento PTZ, non dal modello di rilevamento stesso. Ecco perché tengo così tanto al design completo, non solo alle specifiche del chip.
Perché l'Edge AI può ancora essere la scelta energetica migliore
Credo che l'Edge AI spesso risparmi più energia di una configurazione cloud perché la fotocamera non ha bisogno di trasmettere continuamente video grezzi pesanti. L'uplink video può essere costoso. La fotocamera potrebbe dover mantenere attiva la radio 4G più a lungo. Potrebbe anche necessitare di impostazioni di bitrate più elevate per aiutare i server remoti ad analizzare la scena. Ciò aggiunge carico.
Con l'Edge AI, la fotocamera può inviare solo eventi, metadati e brevi clip quando necessario. Ciò riduce l'uso dei dati e spesso riduce il lavoro totale del sistema. Per i progetti solari, questo è un grosso problema. Un budget energetico più piccolo e più intelligente può significare meno problemi con la batteria e meno guasti all'avvio a freddo dopo il maltempo.
Come guido gli acquirenti su questo punto
Quando discuto di energia con gli acquirenti, pongo tre semplici domande. Il sito dispone di alimentazione stabile? Ha bisogno di tracciamento a tempo pieno? Ha bisogno anche di AI notturna? Se la risposta è sì a tutte e tre, allora consiglio un modello con un piano batteria robusto, un adeguato configurazione solare11, e un SoC per fotocamera progettato per il lavoro continuo Edge. Non consiglio di indovinare. Consiglio di misurare il carico reale sul campo.
Conclusione
Tratto il collegamento a doppia lente come un compito Edge prima di tutto, perché l'AI locale offre un tracciamento più veloce, una migliore disponibilità e un dispiegamento sul campo più sicuro.
1. Esplora come funziona l'auto-tracking nelle telecamere PTZ per seguire bersagli in movimento. ︎↩︎ 2. Comprendi i compromessi tra l'analisi video basata su cloud e l'elaborazione locale. ︎↩︎ 3. Scopri come le architetture ibride edge-cloud bilanciano prestazioni e scalabilità. ︎↩︎ 4. Scopri come le unità di elaborazione neurale accelerano l'inferenza AI nei dispositivi edge. ︎↩︎ 5. Comprendere il concetto di sistemi a doppia lente per la sicurezza e la sorveglianza. ︎↩︎ 6. Imparare come il System-on-Chip integra più unità di elaborazione per l'IA delle telecamere. ︎↩︎ 7. Comprendere il ruolo dei processori di segnale d'immagine nel migliorare la qualità video per l'IA. ︎↩︎ 8. Informarsi sui meccanismi di controllo delle telecamere Pan-Tilt-Zoom e sulle loro applicazioni. ︎↩︎ 9. Comprendere le reti cellulari 4G e il loro ruolo nella connettività remota delle telecamere. ︎↩︎ 10. Informarsi sui fattori che influiscono sul consumo energetico nei dispositivi AI edge. ︎↩︎ 11. Comprendere come i sistemi di energia solare supportano le installazioni di telecamere remote. ︎↩︎