
لقد رأيت العديد من المشاريع تتباطأ لأنها وضعت التتبع الذكي في المكان الخطأ. في عملي، أبحث دائمًا عن أسرع مسار لتحقيق تتبع مستقر.
بالنسبة للربط ثنائي العدسة، تتم معالجة الذكاء الاصطناعي عادةً على الحافة، داخل الكاميرا نفسها، وليس على الواجهة الخلفية. هذا يوفر استجابة أسرع، وتأخيرًا أقل، واستقرارًا أفضل عندما تكون الشبكة ضعيفة أو مفقودة تمامًا.
 الذكاء الاصطناعي للحافة الخلفية ثنائية العدسة
الذكاء الاصطناعي للحافة الخلفية ثنائية العدسة
غالبًا ما أشرح هذا لمدمجي الأنظمة الذين يعملون في المزارع ومواقع البناء والساحات النائية. السؤال الحقيقي ليس فقط أين يعمل الذكاء الاصطناعي. السؤال الحقيقي هو ما إذا كانت الكاميرا يمكنها الاستجابة بسرعة كافية عندما يتحرك هدف.
جدول المحتويات
هل يضمن الربط المستند إلى الحافة وقت استجابة أسرع لـ التتبع التلقائي1 من الإعداد المستند إلى السحابة2?
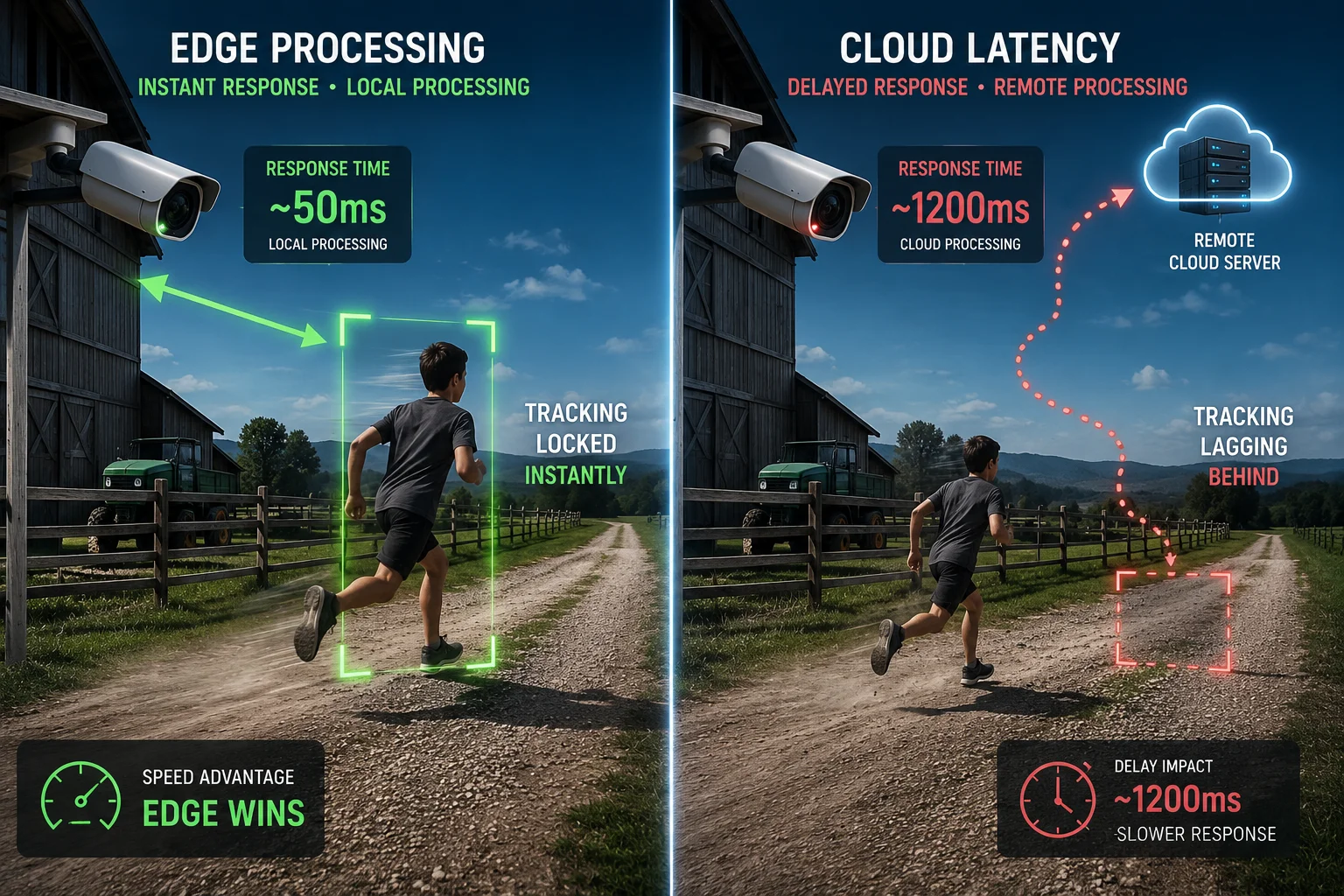
لقد تعلمت أن التأخير هو أول شيء يكسر التتبع التلقائي. إذا انتظرت الكاميرا ردود فعل سحابية، يمكن للهدف أن يتحرك بعيدًا قبل أن تبدأ PTZ في الدوران.
نعم، الربط المستند إلى الحافة أسرع بكثير من الإعداد المستند إلى السحابة للتتبع التلقائي. تعالج الكاميرا الهدف محليًا، لذا يمكنها إرسال أوامر PTZ في الوقت الفعلي دون انتظار رحلات ذهاب وعودة عبر الشبكة.
 الحافة مقابل السحابة للتتبع التلقائي
الحافة مقابل السحابة للتتبع التلقائي
أحب أن أفكر في هذا على أنه سباق بين رد الفعل المحلي والتحكم عن بعد. ترى الحافة الهدف، وتتخذ القرار، وتحرك PTZ داخل نفس الجهاز. يجب على النظام السحابي إرسال الفيديو لأعلى، والانتظار للتحليل، ثم استلام الأمر مرة أخرى لأسفل. هذا المسار الإضافي يضيف تأخيرًا. في شبكة مكتب عادية، قد يبدو هذا التأخير صغيرًا على الورق. في الميدان، غالبًا ما يبدو أكبر بكثير.
لماذا المعالجة المحلية مهمة جدًا
أعمل مع عملاء يهتمون بالنتائج الحقيقية، وليس فقط أوراق المواصفات. يريدون أن تواكب الكاميرا شخصًا يمشي، أو سيارة تدخل بوابة، أو عاملًا يتحرك عبر ساحة. يمكن أن يكون الإعداد المستند إلى السحابة جيدًا للمراجعة والتخزين، ولكنه ضعيف للتحكم المباشر. إذا كانت الشبكة مزدحمة، يمكن للكاميرا أن تفوت اللحظة.
| طريقة التتبع | أين يعمل الذكاء الاصطناعي | سرعة الاستجابة | أفضل حالة استخدام |
|---|---|---|---|
| ربط الحافة | داخل الكاميرا | سريع جداً | تتبع تلقائي مباشر |
| ربط سحابي | خادم عن بعد | أبطأ | سجلات، تقارير، تحكم مركزي |
| إعداد هجين3 | الحافة والواجهة الخلفية معاً | متوازن | مشاريع كبيرة ذات احتياجات مختلطة |
أرى أيضاً سبباً تجارياً واضحاً هنا. العميل الذي يدفع مقابل كاميرا يريد أن تعمل الكاميرا على حافة الموقع، وليس فقط عندما يكون الإنترنت مثالياً. إذا كان الهدف يتحرك بسرعة، فإن تأخيرًا قصيرًا يمكن أن يضر بالنتيجة. لهذا السبب أعامل الحوسبة الطرفية كطبقة أساسية للربط المزدوج العدسة.
لماذا يصبح تأخير السحابة مشكلة ميدانية حقيقية
لقد تعاملت مع مواقع بدت فيها الشبكة جيدة في المكتب، لكنها فشلت في الميدان. يمكن لإشارة 4G أن تتأرجح صعودًا وهبوطًا. يمكن أن تعاني أيضًا من فقدان الحزم، وحمل البرج، ومشكلات الطقس. عندما يحدث ذلك، يبدأ التتبع السحابي في الشعور بالبطء وعدم الاستقرار. قد تتجاوز الكاميرا المتحركة الهدف. قد تصحح متأخرة. قد تفقد الهدف حتى بعد توقف قصير.
أعلم أيضًا أن العديد من المشترين يستخدمون التتبع التلقائي لخفض تكاليف العمالة. يريدون أن تتبع الكاميرا الموضوع بنفسها، لذلك لا يحتاجون إلى حارس لتحريك العرض طوال اليوم. إذا كان التتبع يتفاعل متأخرًا، فإن قيمة النظام بأكمله تنخفض. لهذا السبب أضع دائمًا دماغ التتبع داخل جسم الكاميرا عند التصميم لهذه الحالات الاستخدام.
كيف تدير وحدة معالجة الرقاقة (SoC) الخاصة بالكاميرا المعالجة المتزامنة للذكاء الاصطناعي لتدفقات فيديو مستقلة مزدوجة؟
غالبًا ما يُسألني كيف يمكن لكاميرا واحدة معالجة تغذيتين للفيديو في نفس الوقت دون تجميد. الإجابة ليست سحرًا. إنها مزيج من تصميم SoC،, وحدة المعالجة العصبية4 الطاقة، وتقسيم المهام الذكي.
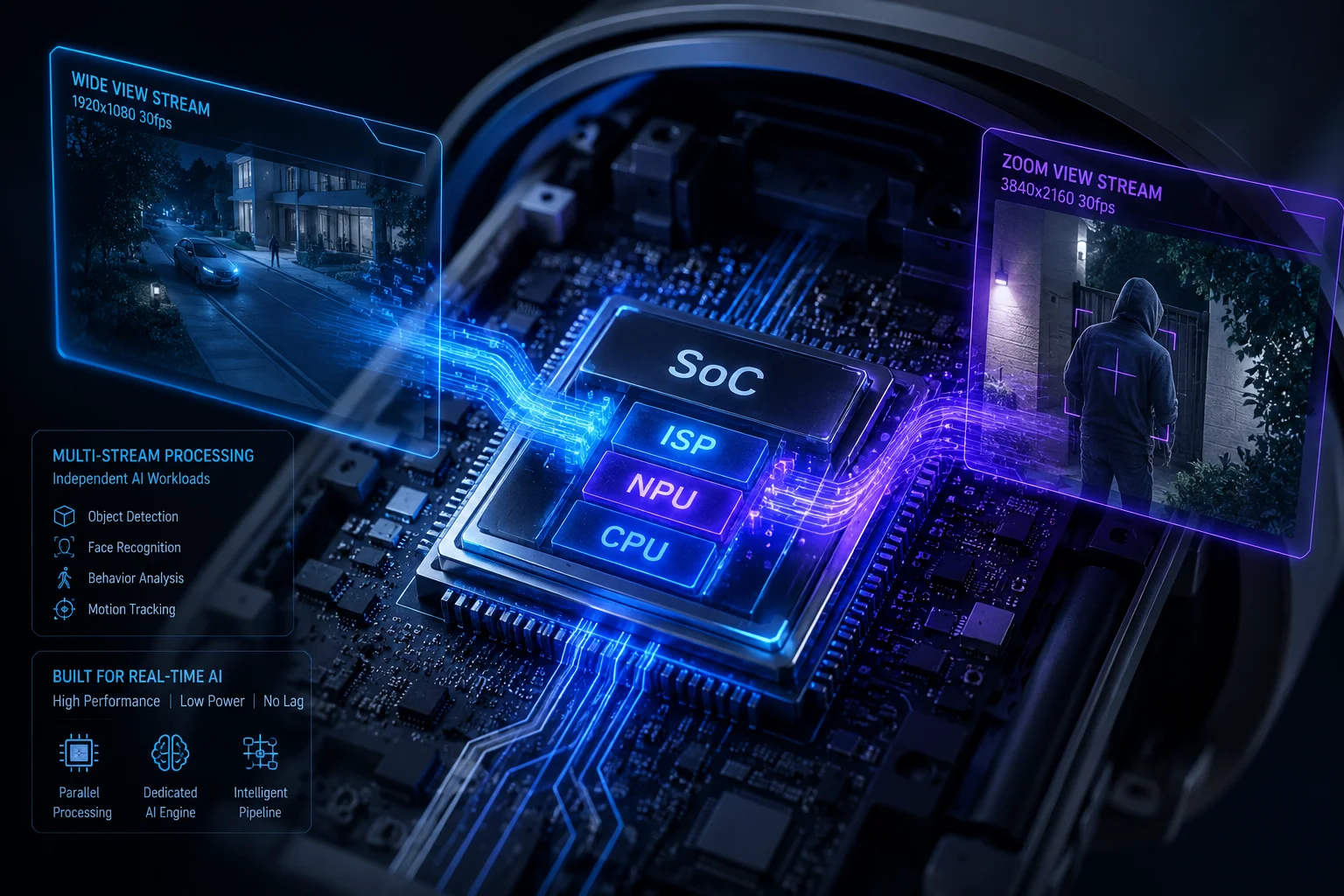
تدير وحدة المعالجة المركزية (SoC) للكاميرا كلا التغذيتين باستخدام كتل الأجهزة المدمجة، وخاصة NPU و ISP، بحيث يمكنها تشغيل الكشف على تدفق واحد والتحكم على التدفق الآخر في نفس الوقت مع تأخير منخفض.
 معالجة تغذية مزدوجة لوحدة المعالجة المركزية (SoC)
معالجة تغذية مزدوجة لوحدة المعالجة المركزية (SoC)
أرى هذا كمصنع صغير داخل الكاميرا. جزء يقرأ الصورة. جزء ينظفها. جزء يشغل الذكاء الاصطناعي. جزء آخر يتعامل مع التحكم في الحركة. الكاميرا لا ترسل المهمة بأكملها إلى نواة معالج ضعيفة واحدة. إنها تقسم العمل. هكذا تحافظ على تشغيل العدستين في وقت واحد.
كيف يتم تقسيم عبء العمل
في ربط العدسة المزدوجة5 الكاميرا، غالبًا ما تراقب العدسة الثابتة مشهدًا واسعًا. ثم تتبع عدسة PTZ الهدف. تقوم العدسة الثابتة بالمهمة الأولى. إنها تجد الشخص أو المركبة. SoC6 يأخذ هذه النتيجة ويحولها إلى إجراء PTZ. يمكن أن يحدث هذا عدة مرات في الثانية.
| كتلة الكاميرا | المهمة الرئيسية | ما أهمية ذلك |
|---|---|---|
| مزود خدمة الإنترنت7 | يحسن بيانات الصورة الأولية | يساعد الذكاء الاصطناعي على رؤية إطارات أوضح |
| وحدة المعالجة العصبية | يشغل نماذج الكشف بالذكاء الاصطناعي | يجعل التحليل المحلي سريعًا |
| وحدة المعالجة المركزية (CPU) | يدير منطق التحكم | يرسل أوامر التتبع |
| التحكم في محرك PTZ | يحرك العدسة | يحافظ على توسيط الهدف |
أعتقد أن هذا التقسيم مهم لأن العمل بالعدسة المزدوجة ليس مجرد “كاميرتين في غلاف واحد”. إنها سلسلة من المهام. إذا كان جزء واحد بطيئًا جدًا، فإن السلسلة بأكملها تتباطأ. تحافظ شريحة النظام (SoC) الجيدة على إحكام السلسلة. يمكنها التعامل مع اكتشاف الهدف، وتحويل الإحداثيات، التحكم PTZ8 دون دفع المهمة الرئيسية إلى خادم بعيد.
لماذا تحتاج خلاصات الفيديو المستقلة إلى جدولة ذكية
أنا أيضًا أولي اهتمامًا لمعدل الإطارات واستخدام الموارد. يمكن لخلاصتي فيديو أن تخلقا عبئًا ثقيلًا. إذا كانت كلتا الخلاصة تعملان بدقة عالية ومعدل إطارات عالٍ، فيجب على الشريحة جدولة العمل بشكل جيد. قد تستخدم الكاميرا إحدى الخلاصة لاكتشاف المشهد الواسع والأخرى لعرض التفاصيل المكبرة. قد تقلل أيضًا من عبء الذكاء الاصطناعي عن طريق تشغيل الكشف الكامل فقط على إطارات محددة.
كيف أشرح هذا للمشترين
عندما أتحدث إلى المشترين التقنيين مثل ديفيد ميلر، أبقي الشرح بسيطًا. أقول إن SoC هو مدير حركة المرور. لا يقوم بمعالجة الفيديو فقط. يقرر المهمة التي تحصل على الأولوية. يساعد الكاميرا على الاستمرار في التتبع حتى عندما يتغير المشهد بسرعة. لهذا السبب يعتبر تصميم الأجهزة الجيد مهمًا جدًا في منتج ذكاء اصطناعي مزدوج العدسة.
هل سيظل ربط العدسة المزدوجة يعمل إذا شبكة 4G9 انقطع الاتصال تمامًا؟
أعرف أن هذا أحد أكبر المخاوف للنشر الميداني. يعمل العديد من العملاء في أماكن لا تكون فيها الشبكة مستقرة طوال اليوم. لا يريدون كاميرا تفشل بمجرد انقطاع الإشارة.
نعم، يمكن لربط العدسة المزدوجة أن يستمر في العمل إذا فقدت شبكة 4G تمامًا، طالما أن منطق الذكاء الاصطناعي والتحكم في PTZ يتم التعامل معهما محليًا على الكاميرا. لا يحتاج الربط إلى وصول مستمر إلى السحابة للاستمرار في تتبع الأهداف.
 فقدان 4G استمرار العدسة المزدوجة
فقدان 4G استمرار العدسة المزدوجة
أريد التأكيد على هذه النقطة لأنها مهمة في المشاريع الحقيقية. يعتقد الكثير من الناس أن 4G هو عقل النظام. ليس كذلك. في كاميرا Edge مصممة جيدًا، 4G هو مجرد قناة للعرض عن بُعد والتنبيهات وبيانات المنصة. يجب أن يظل قرار التتبع الفعلي داخل الجهاز. هذا ما يبقي النظام قيد التشغيل أثناء انقطاع الشبكة.
ما الذي لا يزال يعمل عند انقطاع الشبكة
إذا تم بناء الكاميرا بشكل صحيح، يجب أن تستمر العديد من الوظائف الأساسية أثناء فقدان شبكة 4G بالكامل:
| الوظيفة | يعمل بدون 4G؟ | الملاحظات |
|---|---|---|
| كشف الذكاء الاصطناعي المحلي | نعم | يعمل داخل الكاميرا |
| التتبع التلقائي | نعم | تتبع PTZ الهدف محليًا |
| تسجيل بطاقة SD | نعم | يحفظ الفيديو في الموقع |
| خرج الإنذار | في كثير من الأحيان نعم | يعتمد على تصميم النموذج |
| عرض مباشر سحابي | لا يوجد | يحتاج إلى اتصال بالشبكة |
أجد هذه النقطة مهمة جدًا للمزارع والمواقع والطرق النائية. غالبًا ما يكون لهذه الأماكن تغطية ضعيفة. الكاميرا التي تعتمد على التحكم السحابي هشة للغاية هناك. إذا انقطع الاتصال بالشبكة، يجب أن يظل النظام يقوم بمهمته الرئيسية. يجب أن يكتشف ويتابع ويسجل. هذا هو الوعد الأساسي لـ Edge AI.
لماذا الاستقلالية المحلية أهم من التحكم عن بعد
أفكر أيضًا في المخاطر. إذا فقدت الكاميرا الاتصال بالشبكة وفقدت أيضًا التتبع، فإن العميل يفقد كلاً من الرؤية والثقة. هذا سيء لأي مشروع أمني. ولكن إذا استمرت الكاميرا في التتبع بنفسها، فلا يزال الموقع يتمتع بالحماية. قد يفقد المشغل العرض المباشر عن بعد لفترة من الوقت، لكن الكاميرا لا تصبح عديمة الفائدة.
أرى هذا أيضًا كقضية خدمة. إذا احتاج موقع بعيد إلى زيارة ميدانية في كل مرة ينقطع فيها الاتصال بالشبكة، فإن التكلفة تزداد بسرعة. قد ينفق العميل على الخدمة أكثر مما ينفقه على الكاميرا نفسها. لهذا السبب أضغط من أجل اتخاذ القرارات المحلية. إنها تحمي الأداء والميزانية.
ما هو استهلاك الطاقة10 الفرق عندما تقوم العدستان بتحليل الذكاء الاصطناعي على الحافة؟
غالبًا ما أسمع العملاء يسألون عما إذا كان Edge AI سيستنزف الكثير من الطاقة. هذا السؤال عادل جدًا، خاصة بالنسبة للأنظمة الشمسية وأنظمة 4G. يمكن أن يؤدي استخدام الطاقة إلى نجاح أو فشل التصميم بأكمله.
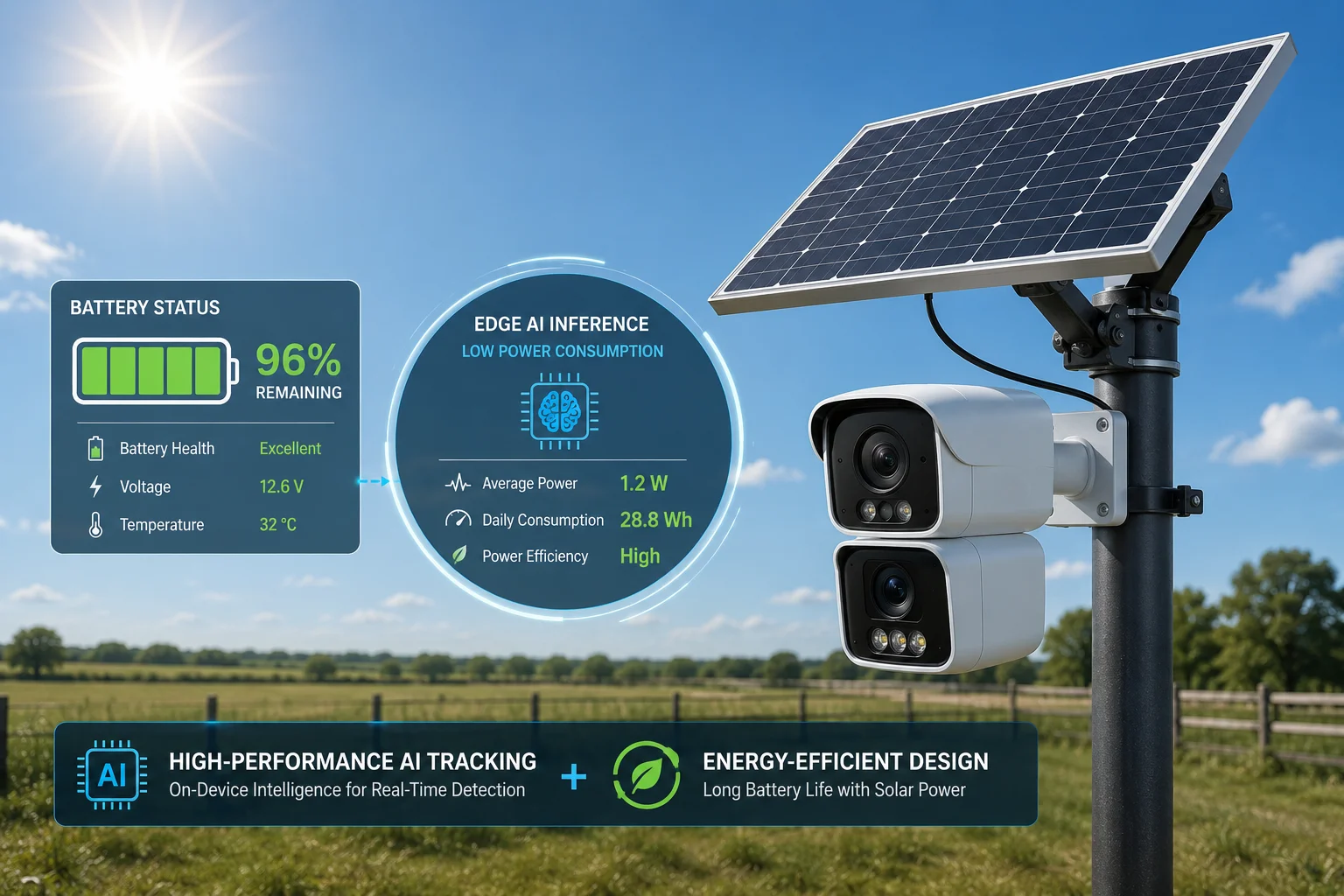
عندما تعمل العدستان على تشغيل الذكاء الاصطناعي على الحافة، يكون استهلاك الطاقة أعلى من التسجيل البسيط، ولكنه لا يزال أكثر كفاءة بكثير من إرسال الفيديو الثقيل إلى الواجهة الخلفية للتحليل. تستخدم الكاميرا المصممة جيدًا شرائح مخصصة للحفاظ على استهلاك الطاقة تحت السيطرة.
 استهلاك الطاقة Edge AI
استهلاك الطاقة Edge AI
أنظر إلى استخدام الطاقة بطريقة عملية. يجب أن توازن الكاميرا بين حمل الذكاء الاصطناعي وحركة العدسة والأشعة تحت الحمراء وإرسال 4G والتخزين. إذا كان الجهاز يستخدم تصميمًا ضعيفًا، فإن البطارية تنفد بسرعة ولا يمكن للوحة الشمسية مواكبة ذلك. إذا كان الجهاز يستخدم SoC جيد وجدولة ذكية، فيمكنه تشغيل ذكاء اصطناعي قوي دون إهدار الطاقة.
ما الذي يزيد من استهلاك الطاقة
هناك عدد قليل من الأسباب الرئيسية لارتفاع استهلاك الطاقة عندما تقوم العدستان بتشغيل الذكاء الاصطناعي:
| عامل الطاقة | التأثير على الاستخدام | سبب بسيط |
|---|---|---|
| استدلال الذكاء الاصطناعي | متوسط إلى مرتفع | تعمل وحدة المعالجة العصبية بجد |
| حركة PTZ | متوسط | تحتاج المحركات إلى تيار |
| إرسال 4G | متوسط | يستخدم الراديو الطاقة لإرسال البيانات |
| الأشعة تحت الحمراء الليلية أو الليزر | عالية | الإضاءة مكلفة من حيث الطاقة |
| معدل إطارات مرتفع | متوسط | المزيد من الإطارات يعني المزيد من العمل |
أعتقد أنه من المفيد فصل “طاقة الذكاء الاصطناعي” عن “طاقة النظام”. الذكاء الاصطناعي هو جزء واحد فقط. في كثير من الحالات، يأتي أكبر استنزاف من الإضاءة الليلية وحركة PTZ، وليس من نموذج الكشف نفسه. لهذا السبب أهتم كثيرًا بالتصميم الكامل، وليس فقط بمواصفات الشريحة.
لماذا لا يزال الذكاء الاصطناعي الطرفي هو الخيار الأفضل للطاقة
أعتقد أن الذكاء الاصطناعي الطرفي غالبًا ما يوفر طاقة أكبر من إعدادات السحابة لأن الكاميرا لا تحتاج إلى بث فيديو خام ثقيل طوال الوقت. يمكن أن يكون رفع الفيديو مكلفًا. قد تحتاج الكاميرا إلى إبقاء راديو 4G نشطًا لفترة أطول. قد تحتاج أيضًا إلى إعدادات معدل بت أعلى لمساعدة الخوادم البعيدة على تحليل المشهد. هذا يضيف عبئًا.
مع الذكاء الاصطناعي الطرفي، يمكن للكاميرا إرسال الأحداث والبيانات الوصفية والمقاطع القصيرة فقط عند الحاجة. هذا يقلل من استخدام البيانات وغالبًا ما يقلل من إجمالي عمل النظام. بالنسبة لمشاريع الطاقة الشمسية، هذا أمر مهم. يمكن أن تعني ميزانية طاقة أصغر وأكثر ذكاءً مشاكل أقل في البطارية وفشل أقل في البدء البارد بعد الطقس السيئ.
كيف أرشد المشترين في هذه النقطة
عندما أناقش الطاقة مع المشترين، أطرح ثلاثة أسئلة بسيطة. هل الموقع لديه طاقة مستقرة؟ هل يحتاج إلى تتبع بدوام كامل؟ هل يحتاج إلى ذكاء اصطناعي ليلي أيضًا؟ إذا كانت الإجابة بنعم على الثلاثة، فأنا أوصي بنموذج بخطة بطارية قوية، إعداد طاقة شمسية مناسب11, ، وشريحة كاميرا SoC مصممة للعمل الطرفي المستمر. لا أوصي بالتخمين. أوصي بقياس الحمل الفعلي في الميدان.
الخاتمة
أتعامل مع ربط العدسة المزدوجة كمهمة طرفية أولاً، لأن الذكاء الاصطناعي المحلي يوفر تتبعًا أسرع، ووقت تشغيل أفضل، ونشرًا ميدانيًا أكثر أمانًا.
1. استكشف كيف يعمل التتبع التلقائي في كاميرات PTZ لتتبع الأهداف المتحركة. ︎↩︎ 2. فهم المفاضلات بين تحليل الفيديو المستند إلى السحابة والمعالجة المحلية. ︎↩︎ 3. اكتشف كيف توازن معماريات الحافة السحابية الهجينة بين الأداء وقابلية التوسع. ︎↩︎ 4. اكتشف كيف تسرع وحدات المعالجة العصبية استدلال الذكاء الاصطناعي في الأجهزة الطرفية. ︎↩︎ 5. فهم مفهوم أنظمة الكاميرات ثنائية العدسة للأمن والمراقبة. ︎↩︎ 6. تعلم كيف يقوم نظام على شريحة (System-on-Chip) بدمج وحدات معالجة متعددة لذكاء اصطناعي الكاميرا. ︎↩︎ 7. فهم دور معالجات إشارة الصور (Image Signal Processors) في تحسين جودة الفيديو للذكاء الاصطناعي. ︎↩︎ 8. تعرف على آليات التحكم في كاميرات التحريك والإمالة والتقريب (Pan-Tilt-Zoom) وتطبيقاتها. ︎↩︎ 9. فهم شبكات الجيل الرابع (4G) الخلوية ودورها في اتصال الكاميرات عن بعد. ︎↩︎ 10. تعلم العوامل التي تؤثر على استهلاك الطاقة في أجهزة الذكاء الاصطناعي الطرفية (edge AI devices). ︎↩︎ 11. فهم كيف تدعم أنظمة الطاقة الشمسية تركيبات الكاميرات عن بعد. ︎↩︎