
He visto muchos proyectos ralentizarse porque pusieron el seguimiento inteligente en el lugar equivocado. En mi trabajo, siempre busco el camino más rápido hacia un seguimiento estable.
Para el enlace de doble lente, el cómputo de IA generalmente se maneja en el Edge, dentro de la propia cámara, no en el Backend. Esto proporciona una respuesta más rápida, menor latencia y mejor estabilidad cuando la red es débil o se pierde por completo.
 ia de doble lente en el borde del backend
ia de doble lente en el borde del backend
A menudo explico esto a los integradores de sistemas que trabajan en granjas, sitios de construcción y patios remotos. La verdadera pregunta no es solo dónde se ejecuta la IA. La verdadera pregunta es si la cámara puede reaccionar lo suficientemente rápido cuando un objetivo se mueve.
Índice
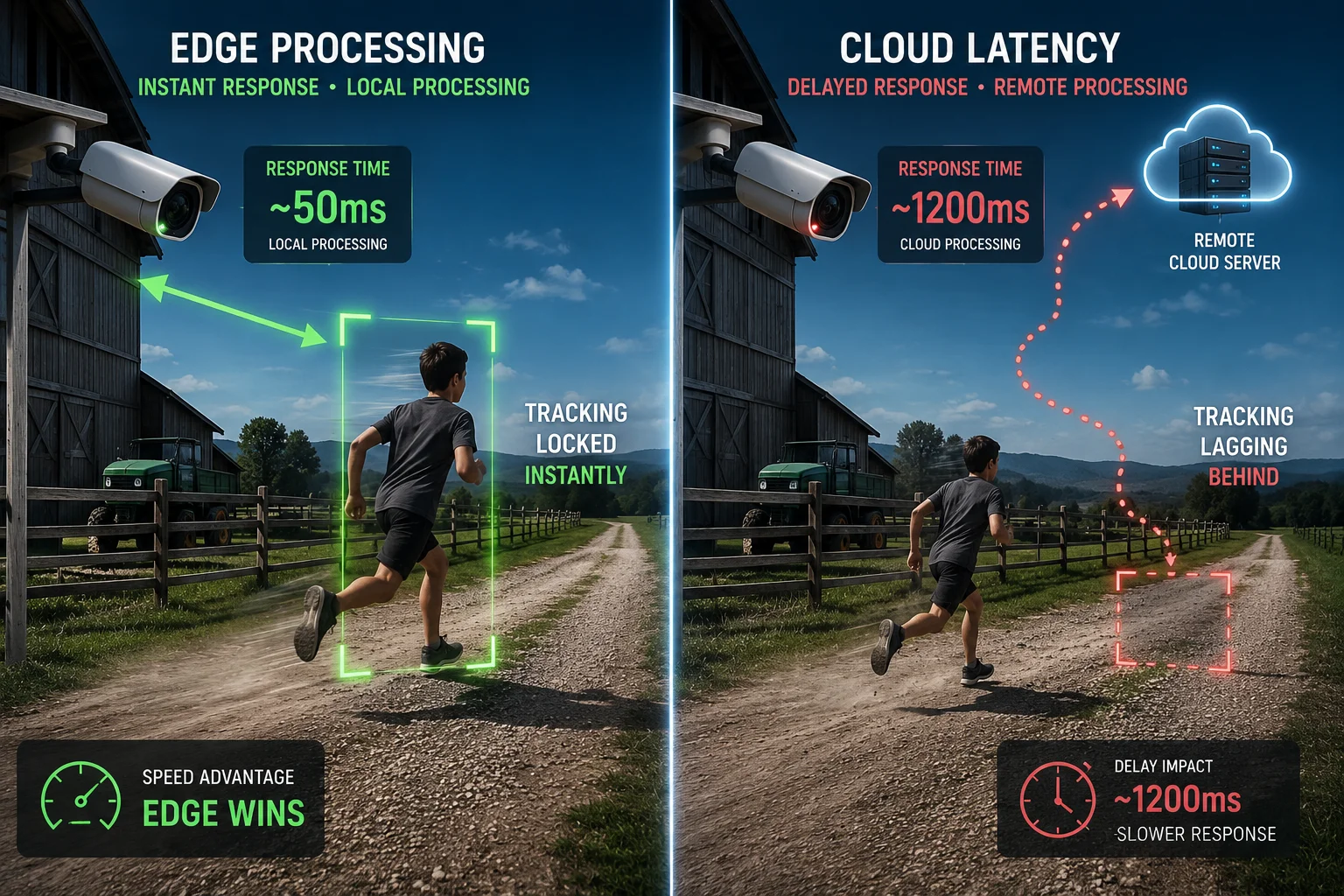
¿El enlace basado en Edge garantiza un tiempo de respuesta más rápido para seguimiento automático1 que un configuración basada en la nube2?
He aprendido que la latencia es lo primero que rompe el auto-seguimiento. Si la cámara espera la retroalimentación de la nube, el objetivo puede alejarse antes de que el PTZ comience a girar.
Sí, el enlace basado en Edge es mucho más rápido que una configuración basada en la nube para el auto-seguimiento. La cámara procesa el objetivo localmente, por lo que puede enviar comandos PTZ en tiempo real sin esperar los viajes de ida y vuelta de la red.
 borde vs nube auto seguimiento
borde vs nube auto seguimiento
Me gusta pensar en esto como una carrera entre la reacción local y el control remoto. El Edge ve el objetivo, toma la decisión y mueve el PTZ dentro del mismo dispositivo. Un sistema en la nube debe enviar el video hacia arriba, esperar el análisis y luego recibir el comando de regreso. Esa ruta adicional agrega latencia. En una red de oficina normal, esa latencia puede parecer pequeña en el papel. En el campo, a menudo se siente mucho mayor.
Por qué el procesamiento local importa tanto
Trabajo con clientes a los que les importan los resultados reales, no solo las hojas de especificaciones. Quieren que la cámara siga el ritmo de una persona caminando, un automóvil entrando por una puerta o un trabajador moviéndose por un patio. Una configuración basada en la nube puede ser adecuada para la revisión y el almacenamiento, pero es débil para el control en vivo. Si la red está ocupada, la cámara puede perder el momento.
| Método de seguimiento | Dónde se ejecuta la IA | Velocidad de respuesta | El mejor caso de uso |
|---|---|---|---|
| Vinculación de borde | Dentro de la cámara | Muy rápido | Seguimiento automático en vivo |
| Vinculación en la nube | Servidor remoto | Más lento | Historial, informes, control central |
| Configuración híbrida3 | Tanto de borde como de backend | Equilibrado | Proyectos grandes con necesidades mixtas |
También veo una clara razón comercial aquí. Un cliente que paga por una cámara quiere que la cámara funcione en el borde del sitio, no solo cuando Internet es perfecto. Si el objetivo se mueve rápido, incluso un pequeño retraso puede perjudicar el resultado. Es por eso que trato la computación de borde como la capa base para la vinculación de doble lente.
Por qué el retraso de la nube se convierte en un problema real en el campo
He tratado con sitios donde la red parecía estar bien en la oficina, pero fallaba en el campo. Una señal 4G puede fluctuar. También puede sufrir pérdida de paquetes, carga de la torre y problemas climáticos. Cuando eso sucede, el seguimiento en la nube comienza a sentirse lento e inestable. El PTZ puede pasarse de largo. Puede corregir tarde. Incluso puede perder el objetivo después de una breve pausa.
También sé que muchos compradores utilizan el seguimiento automático para reducir los costos de mano de obra. Quieren que la cámara siga al sujeto por sí sola, para no necesitar un guardia que mueva la vista todo el día. Si el seguimiento reacciona tarde, el valor de todo el sistema disminuye. Es por eso que siempre coloco el cerebro de seguimiento dentro del cuerpo de la cámara cuando diseño para estos casos de uso.
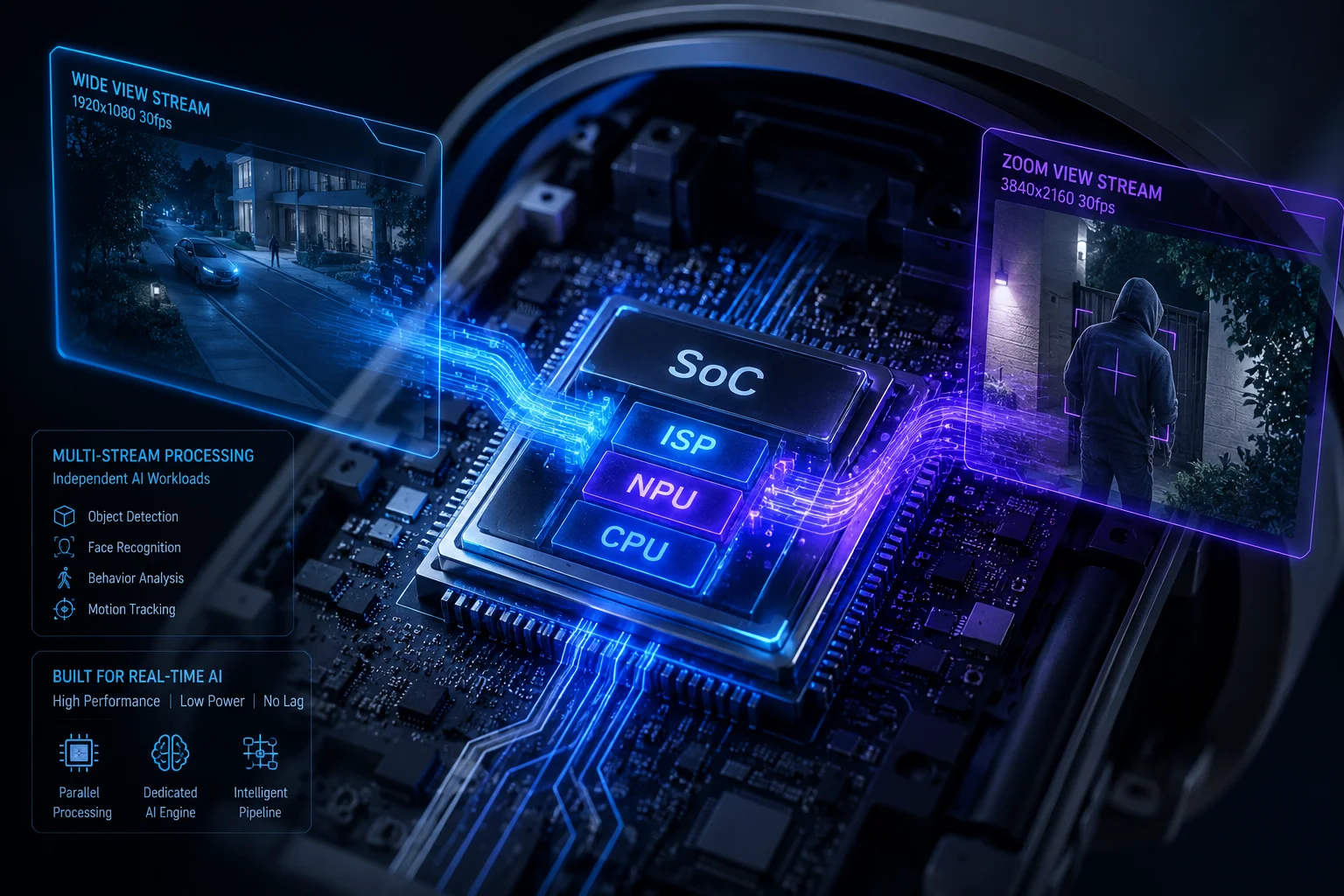
¿Cómo gestiona el SoC de la cámara el procesamiento simultáneo de IA de dos flujos de video independientes?
A menudo me preguntan cómo una cámara puede procesar dos flujos de video al mismo tiempo sin congelarse. La respuesta no es magia. Es una combinación de diseño de SoC, NPU4 potencia y división inteligente de tareas.
El SoC de la cámara gestiona ambos flujos utilizando bloques de hardware integrados, especialmente la NPU y la ISP, por lo que puede ejecutar la detección en un flujo y el control en el otro flujo al mismo tiempo con baja latencia.
 procesamiento de doble flujo soc
procesamiento de doble flujo soc
Veo esto como una pequeña fábrica dentro de la cámara. Una parte lee la imagen. Una parte la limpia. Una parte ejecuta IA. Otra parte maneja el control de movimiento. La cámara no envía todo el trabajo a un solo núcleo de CPU débil. Divide el trabajo. Así es como mantiene ambas lentes activas a la vez.
Cómo se divide la carga de trabajo
En una enlace de doble lente5 cámara, la lente fija a menudo observa una escena amplia. La lente PTZ luego sigue al objetivo. La lente fija hace el primer trabajo. Encuentra a la persona o vehículo. La SoC6 toma ese resultado y lo convierte en una acción PTZ. Esto puede suceder muchas veces por segundo.
| Bloque de cámara | Trabajo principal | Por qué es importante |
|---|---|---|
| ISP7 | Mejora los datos de imagen sin procesar | Ayuda a la IA a ver fotogramas más claros |
| NPU | Ejecuta modelos de detección de IA | Realiza análisis local rápido |
| CPU | Gestiona la lógica de control | Envía comandos de seguimiento |
| Control del motor PTZ | Mueve la lente | Mantiene el objetivo centrado |
Creo que esta división es importante porque el trabajo de doble lente no es solo “dos cámaras en una carcasa”. Es una cadena de tareas. Si una parte es demasiado lenta, toda la cadena se ralentiza. Un buen SoC mantiene la cadena ajustada. Puede manejar la detección de objetivos, la conversión de coordenadas y control PTZ8 sin enviar el trabajo principal a un servidor remoto.
Por qué las transmisiones independientes necesitan una programación inteligente
También presto atención a la velocidad de fotogramas y al uso de recursos. Dos transmisiones pueden crear una carga pesada. Si ambas transmisiones se ejecutan a alta resolución y alta velocidad de fotogramas, el chip debe programar bien el trabajo. La cámara puede usar una transmisión para la detección de escenas amplias y la otra para la vista de zoom detallada. También puede reducir la carga de IA ejecutando la detección completa solo en fotogramas seleccionados.
Cómo explico esto a los compradores
Cuando hablo con compradores técnicos como David Miller, mantengo la explicación simple. Digo que el SoC es el gestor de tráfico. No solo procesa video. Decide qué tarea tiene prioridad. Ayuda a la cámara a seguir rastreando incluso cuando la escena cambia rápidamente. Es por eso que un buen diseño de hardware es tan importante en un producto de IA de doble lente.
¿Seguirá funcionando el enlace de doble lente si la red 4G9 conexión se pierde por completo?
Sé que esta es una de las mayores preocupaciones para el despliegue en campo. Muchos clientes trabajan en lugares donde la red no es estable todo el día. No quieren una cámara que falle en el momento en que la señal se cae.
Sí, el enlace de doble lente puede seguir funcionando si se pierde completamente el 4G, siempre y cuando la lógica de IA y el control PTZ se manejen localmente en la cámara. El enlace no necesita acceso constante a la nube para seguir rastreando objetivos.
 4g perdido doble lente continúa
4g perdido doble lente continúa
Quiero enfatizar este punto porque es importante en proyectos reales. Mucha gente piensa que el 4G es el cerebro del sistema. No lo es. En una cámara Edge bien diseñada, el 4G es solo el conducto para la visualización remota, las alertas y los datos de la plataforma. La decisión real de seguimiento debe permanecer dentro del dispositivo. Eso es lo que mantiene vivo el sistema durante una interrupción de la red.
Qué sigue funcionando cuando la red se cae
Si la cámara está bien construida, varias funciones principales deberían continuar durante una pérdida total de 4G:
| Función | ¿Funciona sin 4G? | Notas |
|---|---|---|
| Detección local de IA | Sí | Se ejecuta dentro de la cámara |
| Seguimiento automático | Sí | PTZ sigue al objetivo localmente |
| grabación de tarjeta SD | Sí | Guarda video en el sitio |
| Salida de alarma | A menudo sí | Depende del diseño del modelo |
| Vista en vivo en la nube | No | Necesita conexión de red |
Encuentro este punto muy importante para granjas, sitios y carreteras remotas. Estos lugares a menudo tienen cobertura débil. Una cámara que depende del control en la nube es demasiado frágil allí. Si la red se cae, el sistema aún debería hacer su trabajo principal. Debería detectar, seguir y grabar. Esa es la promesa básica de Edge AI.
Por qué la autonomía local importa más que el control remoto
También pienso en el riesgo. Si una cámara pierde la red y también pierde el seguimiento, el cliente pierde tanto la visibilidad como la confianza. Eso es malo para cualquier proyecto de seguridad. Pero si la cámara sigue rastreando por sí sola, el sitio aún tiene protección. El operador puede perder la vista en vivo remota por un tiempo, pero la cámara no se vuelve inútil.
También veo esto como un problema de servicio. Si un sitio remoto necesita una visita técnica cada vez que se cae la red, el costo aumenta rápidamente. El cliente puede gastar más en servicio que en la propia cámara. Es por eso que insisto en la toma de decisiones local. Protege tanto el rendimiento como el presupuesto.
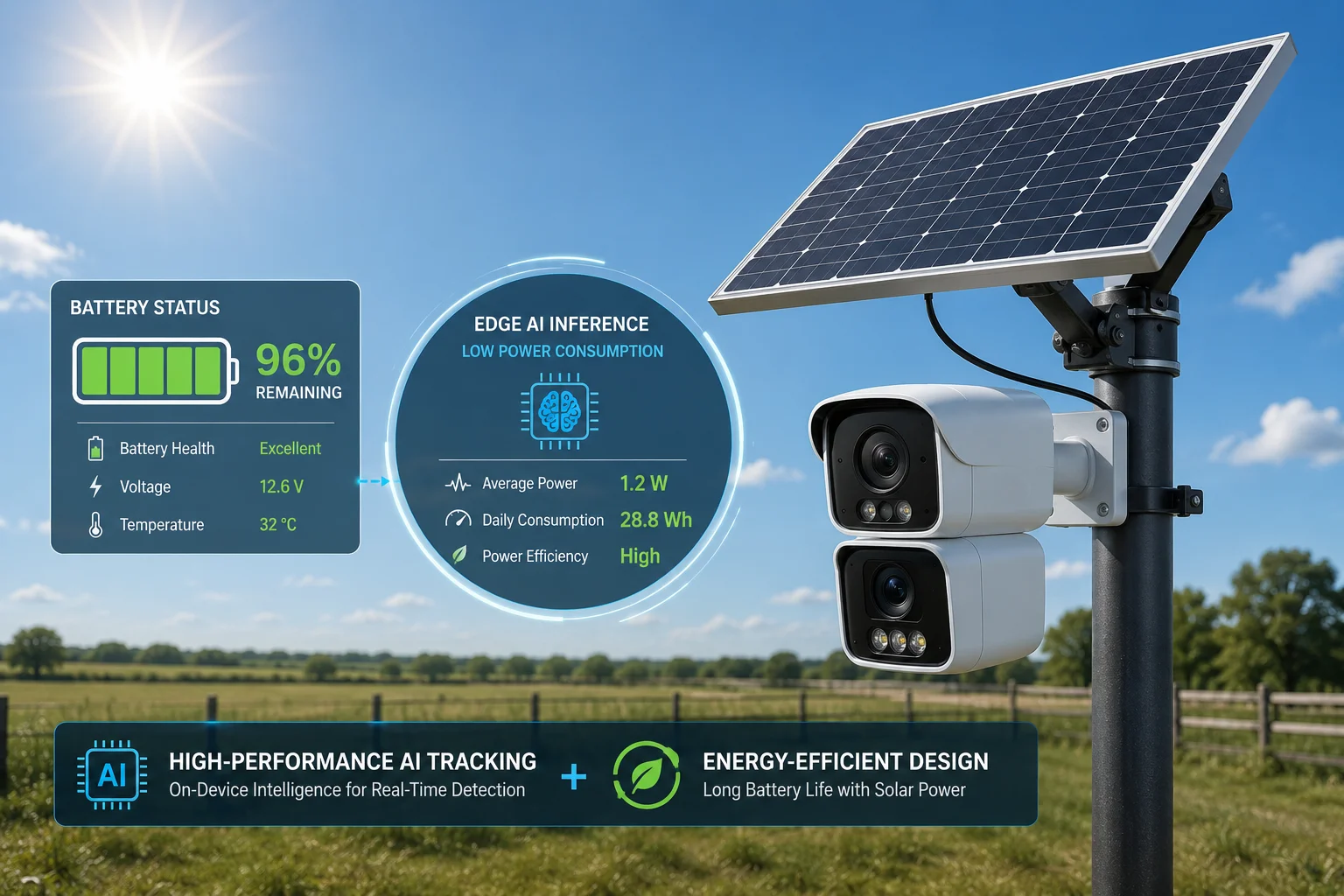
¿Cuál es el consumo de energía10 diferencia cuando ambos lentes realizan análisis de IA en el Edge?
A menudo escucho a los clientes preguntar si Edge AI consumirá demasiada energía. Esta pregunta es muy justa, especialmente para sistemas solares y 4G. El uso de energía puede hacer o deshacer todo el diseño.
Cuando ambos lentes ejecutan IA en el Edge, el consumo de energía es mayor que la simple grabación, pero sigue siendo mucho más eficiente que enviar video pesado al Backend para su análisis. Una cámara bien diseñada utiliza chips dedicados para mantener el consumo de energía bajo control.
 consumo de energía edge ai
consumo de energía edge ai
Miro el uso de energía de manera práctica. La cámara debe equilibrar la carga de IA, el movimiento del lente, el infrarrojo, la transmisión 4G y el almacenamiento. Si el dispositivo utiliza un diseño débil, la batería se agota rápidamente y el panel solar no puede seguir el ritmo. Si el dispositivo utiliza un SoC bueno y una programación inteligente, puede ejecutar IA potente sin desperdiciar energía.
Qué aumenta el consumo de energía
Hay algunas razones principales por las que el consumo de energía aumenta cuando ambos lentes ejecutan IA:
| Factor de potencia | Efecto en el uso | Razón simple |
|---|---|---|
| Inferencia de IA | Medio a alto | La NPU trabaja duro |
| Movimiento PTZ | Medio | Los motores necesitan corriente |
| Transmisión 4G | Medio | La radio usa energía para enviar datos |
| IR nocturno o láser | Alta | La iluminación es costosa en términos de energía |
| Alta tasa de fotogramas | Medio | Más fotogramas significan más trabajo |
Creo que ayuda a separar la “potencia de IA” de la “potencia del sistema”. La IA es solo una parte. En muchos casos, el mayor consumo proviene de la iluminación nocturna y el movimiento PTZ, no del modelo de detección en sí. Es por eso que me importa tanto el diseño completo, no solo la especificación del chip.
Por qué Edge AI puede seguir siendo la mejor opción de energía
Creo que Edge AI a menudo ahorra más energía que una configuración en la nube porque la cámara no necesita transmitir video crudo pesado todo el tiempo. El enlace ascendente de video puede ser costoso. La cámara puede necesitar mantener la radio 4G activa por más tiempo. También puede necesitar configuraciones de mayor tasa de bits para ayudar a los servidores remotos a analizar la escena. Eso añade carga.
Con Edge AI, la cámara puede enviar solo eventos, metadatos y clips cortos cuando sea necesario. Esto reduce el uso de datos y a menudo reduce el trabajo total del sistema. Para proyectos solares, eso es un gran problema. Un presupuesto de energía más pequeño e inteligente puede significar menos problemas de batería y menos fallos de arranque en frío después de un clima adverso.
Cómo guío a los compradores en este punto
Cuando hablo de energía con los compradores, hago tres preguntas sencillas. ¿El sitio tiene energía estable? ¿Necesita seguimiento a tiempo completo? ¿Necesita IA nocturna también? Si la respuesta es sí a las tres, entonces recomiendo un modelo con un plan de batería sólido, una configuración solar adecuada configuración solar11, y un SoC de cámara hecho para trabajo continuo en el borde. No recomiendo adivinar. Recomiendo medir la carga real en campo.
Conclusión
Trato el enlace de doble lente como una tarea de Edge primero, porque la IA local proporciona un seguimiento más rápido, un mejor tiempo de actividad y una implementación de campo más segura.
1. Explore cómo funciona el auto-seguimiento en las cámaras PTZ para seguir objetivos en movimiento. ︎↩︎ 2. Comprenda las compensaciones entre el análisis de video basado en la nube y el procesamiento local. ︎↩︎ 3. Descubra cómo las arquitecturas híbridas de borde-nube equilibran el rendimiento y la escalabilidad. ︎↩︎ 4. Descubra cómo las Unidades de Procesamiento Neuronal aceleran la inferencia de IA en dispositivos de borde. ︎↩︎ 5. Comprender el concepto de sistemas de cámara de doble lente para seguridad y vigilancia. ︎↩︎ 6. Aprender cómo el System-on-Chip integra múltiples unidades de procesamiento para la IA de la cámara. ︎↩︎ 7. Comprender el papel de los procesadores de señal de imagen en la mejora de la calidad de video para la IA. ︎↩︎ 8. Aprender sobre los mecanismos de control de cámaras Pan-Tilt-Zoom y sus aplicaciones. ︎↩︎ 9. Comprender las redes celulares 4G y su papel en la conectividad remota de cámaras. ︎↩︎ 10. Aprender sobre los factores que afectan el uso de energía en dispositivos de IA de borde. ︎↩︎ 11. Comprender cómo los sistemas de energía solar soportan instalaciones de cámaras remotas. ︎↩︎