
Já vi as taxas de detecção de IA caírem de 98% para 60% em projetos reais. A causa principal era sempre a mesma: configurações ruins de tempo de permanência no caminho de cruzeiro do PTZ.
A precisão do tempo de permanência nos caminhos de cruzeiro controla o número de quadros claros e estáveis que o mecanismo de IA obtém em cada posição predefinida. Se o tempo de permanência for muito curto, começar muito cedo ou mudar entre os ciclos, a IA perderá alvos, criará falsos negativos e fornecerá resultados analíticos não confiáveis em todo o site.
 Precisão do tempo de permanência da câmera PTZ Reconhecimento de IA caminho de cruzeiro
Precisão do tempo de permanência da câmera PTZ Reconhecimento de IA caminho de cruzeiro
Abaixo, detalho as necessidades exatas de tempo, os métodos de sincronização, os riscos de detecção de tempos de permanência curtos e os truques de otimização que todo integrador deve conhecer antes de implementar câmeras PTZ com tecnologia de IA.
Quantos segundos de tempo de espera são necessários para que a IA examine uma nova cena?
Eu costumava definir o tempo de permanência em 2 segundos e depois me perguntava por que minha IA continuava errando metade dos alvos. A matemática me mostrou o motivo.
A maioria dos algoritmos de IA precisa de pelo menos 3 a 5 segundos de tempo de permanência estável em cada predefinição. Os primeiros 0,5 a 1 segundo vão para a estabilização mecânica e o foco automático. O restante fornece os quadros claros consecutivos de que a IA precisa para detecção e confirmação confiáveis do alvo.
 Tempo de permanência da PTZ segundos necessários para a varredura de cena AI
Tempo de permanência da PTZ segundos necessários para a varredura de cena AI
Compreensão do orçamento de tempo em cada predefinição
Quando uma câmera PTZ chega a uma nova posição predefinida, várias coisas devem acontecer antes que a IA possa fazer qualquer trabalho útil. Primeiro, o motor para. Mas o corpo da câmera não para instantaneamente. Sempre há alguma vibração física causada pela parada repentina. Essa vibração pode durar de 0,3 a 0,5 segundo na maioria das unidades PTZ comerciais. Durante esse período, todos os quadros capturados pela câmera apresentam desfoque de movimento. Modelos de IA como YOLO 1 ou qualquer detector acelerado por TensorRT precisam de bordas nítidas para encontrar objetos. Quadros borrados são inúteis.
Depois que a vibração se acalma, o sistema de foco automático entra em ação. Mesmo rápido PDAF (foco automático com detecção de fase) 2 leva cerca de 0,3 a 0,5 segundos para travar na cena. Até que o foco seja travado, a imagem é suave. A IA não pode extrair recursos como estrutura facial ou caracteres de placas de carro de uma imagem suave.
Somente depois que a estabilização e o foco são concluídos é que a IA obtém quadros utilizáveis. Veja como o orçamento de tempo se divide em cada predefinição:
| Fase | Duração | O que acontece | Usabilidade da IA |
|---|---|---|---|
| Estabilização mecânica | 0,3-0,5 s | O motor para, a vibração é amortecida | Os quadros estão embaçados |
| Bloqueio de foco automático | 0,3-0,5 s | A lente se ajusta à nova profundidade da cena | A imagem é suave |
| Janela de captura de IA | 2-3 segundos | Fluxo de quadros claro e estável para IA | Válido para detecção |
| Zona de buffer/retentativa | 0,5 a 1 segundo | Trata o atraso da rede ou a repetição do algoritmo | Margem de segurança |
| Total recomendado | 3-5 segundos | — | — |
Por que 2 segundos quase nunca são suficientes
Converso com integradores que definem o tempo de permanência em 2 segundos porque querem cobrir mais predefinições em um único ciclo de cruzeiro. A lógica parece sólida - mais paradas significam mais cobertura. Mas a realidade é diferente.
Se o tempo total de permanência for de 2 segundos e a câmera gastar 0,5 segundo no amortecimento da vibração e mais 0,5 segundo no foco automático, a IA obterá apenas 1 segundo de filmagem nítida. A 15 FPS, são apenas 15 quadros. A maioria dos algoritmos de IA usa um método de votação de vários quadros. Eles precisam ver um alvo em pelo menos 3 a 5 quadros consecutivos antes de marcá-lo como “confirmado”. Com apenas 15 quadros e possíveis obstruções ou mudanças de iluminação, o algoritmo geralmente não consegue concluir o loop de detecção, rastreamento e confirmação.
O resultado é simples. A IA vê algo, mas não tem dados suficientes para dizer “sim, isso é uma pessoa” ou “sim, isso é um veículo”. Portanto, ela permanece em silêncio. E o operador nunca recebe o alerta.
Posso sincronizar o acionador de detecção de IA com a chegada da câmera a uma predefinição?
Certa vez, passei uma semana inteira depurando detecções perdidas em um projeto de perímetro. A IA estava acionando a varredura antes mesmo de a câmera terminar de focalizar.
Sim, a sincronização é possível. Mas o acionamento da detecção de IA deve começar depois que a câmera confirmar a estabilização mecânica e o bloqueio do foco automático. Iniciar a varredura de IA quando o comando de movimento é enviado, em vez de quando a câmera informa “posição alcançada e focada”, é o erro de integração mais comum.
 O gatilho de detecção de IA sincroniza a chegada predefinida de PTZ
O gatilho de detecção de IA sincroniza a chegada predefinida de PTZ
A diferença entre “Comando enviado” e “Posição confirmada”
É nesse ponto que muitos projetos dão errado. Na maioria dos sistemas de controle PTZ, há dois eventos separados. O primeiro evento é o “comando enviado”. Esse é o momento em que o controlador diz à câmera para ir para a predefinição 5. O segundo evento é “posição confirmada”. Esse é o momento em que a câmera informa que chegou, parou de se mover e travou o foco.
O problema é que muitas plataformas NVR e VMS iniciam a contagem regressiva do tempo de espera a partir do “comando enviado”. Isso significa que o relógio já está funcionando enquanto a câmera ainda está girando. Quando a câmera realmente para e focaliza, uma grande parte do tempo de espera já passou.
Sempre recomendo verificar se o seu protocolo PTZ é compatível com uma chamada de retorno ou sinalizador de status “posição alcançada”. Perfil S do ONVIF 3, por exemplo, oferece suporte a consultas de status de posição predefinida. Se o seu sistema puder ler esse sinalizador, você poderá criar uma regra lógica simples. A regra diz: “Não inicie a varredura de IA até que a câmera confirme que está na posição de destino e o foco esteja travado.”
Como os diferentes métodos de sincronização se comparam
Nem todos os sistemas PTZ oferecem o mesmo nível de sincronização. Aqui está uma comparação das abordagens comuns que vejo em campo:
| Método de sincronização | Como funciona | Prós | Contras |
|---|---|---|---|
| Baseado em temporizador (atraso fixo) | Inicia a varredura de IA X segundos após o comando de movimentação | Simples de configurar | Não se adapta a tempos de movimentação variáveis |
| Sondagem de status ONVIF | Verifica o sinalizador de status predefinido a cada 200 ms | Precisão para câmeras compatíveis | Adiciona uma pequena sobrecarga de rede |
| Acionado por codificador | A IA é iniciada quando o codificador confirma a estabilidade do vídeo | Muito confiável | Requer integração no nível do codificador |
| Calibração manual | O operador testa e define o atraso por predefinição | Funciona em qualquer sistema | Consome tempo, não é escalável |
Minha abordagem preferida
Para projetos em que uso nossas câmeras PTZ Loyalty-Secu, prefiro o método acionado por codificador. Nossas câmeras informam um sinalizador de vídeo estável quando o motor para e o ciclo PDAF é concluído. Esse sinalizador passa pelos metadados do fluxo RTSP. O backend de IA lê esse sinalizador e inicia sua janela de detecção somente após recebê-lo. Dessa forma, nunca perco tempo de espera em quadros desfocados ou sem foco. Cada segundo de tempo de espera é um segundo produtivo para a IA.
Se o VMS não for compatível com a análise de metadados, eu recorro a um método de atraso fixo. Mas sempre adiciono uma margem de segurança de 1 segundo ao tempo de estabilização medido. É melhor perder 1 segundo de cobertura do que perder toda a detecção nessa predefinição.
Um tempo de espera curto fará com que minha IA perca alertas de detecção de pessoas ou veículos?
Recebi uma ligação de um cliente às 2h da manhã porque a IA de perímetro não detectou um intruso andando em um estacionamento. O tempo de permanência foi definido como 1,5 segundo.
Sim. Um tempo de permanência curto causa diretamente a perda de detecções. Os algoritmos de IA usam votação de vários quadros para confirmar alvos. Se a câmera se afastar antes que o algoritmo termine seu ciclo de detecção-rastreamento-confirmação, o sistema produzirá falsos negativos. As ameaças reais passam pela cena sem serem detectadas.
 Tempo de permanência curto Detecção de veículo humano perdida por IA
Tempo de permanência curto Detecção de veículo humano perdida por IA
Como funciona a votação em vários quadros
A maioria dos sistemas modernos de detecção de IA não depende de um único quadro. Um único quadro pode conter sombras, reflexos ou formas estranhas que se parecem com uma pessoa, mas não são. Para evitar esses alarmes falsos, a IA usa um método chamado votação em vários quadros.
O processo funciona da seguinte forma. A IA executa seu modelo de detecção no Quadro 1. Ela encontra uma forma que se parece com um ser humano com 72% de confiança. Ela ainda não aciona um alerta. No Quadro 2, ela encontra a mesma forma em uma posição semelhante com 78% de confiança. No Quadro 3, 81%. No Quadro 4, 85%. Depois de ver o alvo em 3 a 5 quadros consecutivos com confiança crescente ou estável, o algoritmo o marca como um “alvo confirmado” e envia o alerta.
Esse processo leva tempo. A 15 FPS, cinco quadros levam cerca de 0,33 segundos. Isso parece rápido. Mas lembre-se, essa é apenas a etapa de votação. Antes de iniciar a votação, o algoritmo também precisa inicializar o rastreador, criar uma caixa delimitadora e comparar o alvo com suas classes de modelo. O loop completo de detecção-rastreamento-confirmação geralmente leva de 1 a 2 segundos de vídeo limpo.
O que acontece quando você interrompe o ciclo
Se o tempo de permanência for de apenas 1,5 segundo e os primeiros 0,8 segundo forem perdidos para estabilização e foco, a IA terá apenas 0,7 segundo de vídeo limpo. Isso equivale a cerca de 10 quadros a 15 FPS. O algoritmo inicia sua detecção no Quadro 1. No Quadro 5, ele está ganhando confiança. No Quadro 10, ele pode estar próximo da confirmação. Mas então a câmera se move. O alvo desaparece do quadro. O rastreador perde o objeto. A pontuação de confiança é redefinida.
A IA nunca aciona o alerta. O alvo estava lá. A câmera o viu. Mas o algoritmo não teve tempo suficiente para dizer “confirmado”. Isso é um falso negativo. E os falsos negativos são muito mais perigosos do que os falsos positivos. Um falso positivo é um alerta extra incômodo. Um falso negativo é um intruso perdido.
O impacto em diferentes tarefas de detecção
Nem todas as tarefas de IA têm as mesmas necessidades de tempo. O reconhecimento de placas de veículos (LPR) é mais exigente do que a simples detecção humana porque o algoritmo precisa ler caracteres individuais. Aqui está um guia aproximado baseado em minha experiência com projetos:
| Tarefa de IA | Mínimo de quadros transparentes necessários | Tempo mínimo efetivo de permanência | Risco se o tempo de permanência for muito curto |
|---|---|---|---|
| Detecção humana | 3-5 quadros | 2-3 segundos | Alertas de intruso perdidos |
| Detecção de veículos | 3-5 quadros | 2-3 segundos | Registros de entrada de veículos perdidos |
| Reconhecimento de placas de veículos | 8-15 quadros | 4-5 segundos | Caracteres de placa ilegíveis |
| Reconhecimento facial | 10-20 quadros | 5 a 7 segundos | Falha na correspondência de identidade |
| Análise comportamental (vadiagem) | Mais de 30 quadros | 5-10 segundos | Cálculos falsos de tempo de permanência |
Essa tabela deixa uma coisa bem clara. Quanto mais detalhes a IA precisa extrair, mais tempo ela precisa. E esse tempo deve ser limpo, estável e focado. Não há atalhos.
Como posso otimizar a programação de cruzeiros para equilibrar a área de cobertura e a precisão da IA?
Eu sempre digo aos meus clientes o seguinte: mais predefinições não significam melhor segurança. Às vezes, menos paradas com tempos de espera mais longos proporcionam resultados muito melhores no mundo real.
Para equilibrar a área de cobertura e a precisão da IA, reduza o número de predefinições para apenas zonas de alta prioridade, dê a cada parada pelo menos 5 segundos de tempo de permanência e siga a regra dos 5 segundos - 1 segundo para estabilização, 3 segundos para captura de IA e 1 segundo para buffer contra atrasos na rede ou no processamento.
 otimizar a cobertura de equilíbrio da programação de cruzeiros Precisão da IA
otimizar a cobertura de equilíbrio da programação de cruzeiros Precisão da IA
A regra dos 5 segundos
Eu uso uma estrutura simples para cada caminho de cruzeiro que configuro. Eu a chamo de regra dos 5 segundos. Ela divide cada período de permanência em três fases:
- Segundo 1: A câmera se estabiliza. A vibração do motor é interrompida. O PDAF bloqueia o foco. Nenhum trabalho útil de IA acontece aqui.
- Segundos 2 a 4: Essa é a janela principal de captura da IA. A 15 FPS, a IA obtém 45 quadros limpos. Isso é suficiente para detecção humana, detecção de veículos e até mesmo LPR básico com boa iluminação.
- Segundo 5: Essa é a zona de buffer. Ela lida com a latência da rede entre a câmera e o NVR, quaisquer ciclos de repetição de algoritmo e pequenos atrasos de codificação.
Essa regra não é perfeita para todos os cenários. Para reconhecimento facial ou análise comportamental, eu amplio o tempo de permanência para 7 ou até 10 segundos. Mas para a segurança de perímetro padrão com detecção de pessoas e veículos, 5 segundos por predefinição é uma linha de base sólida.
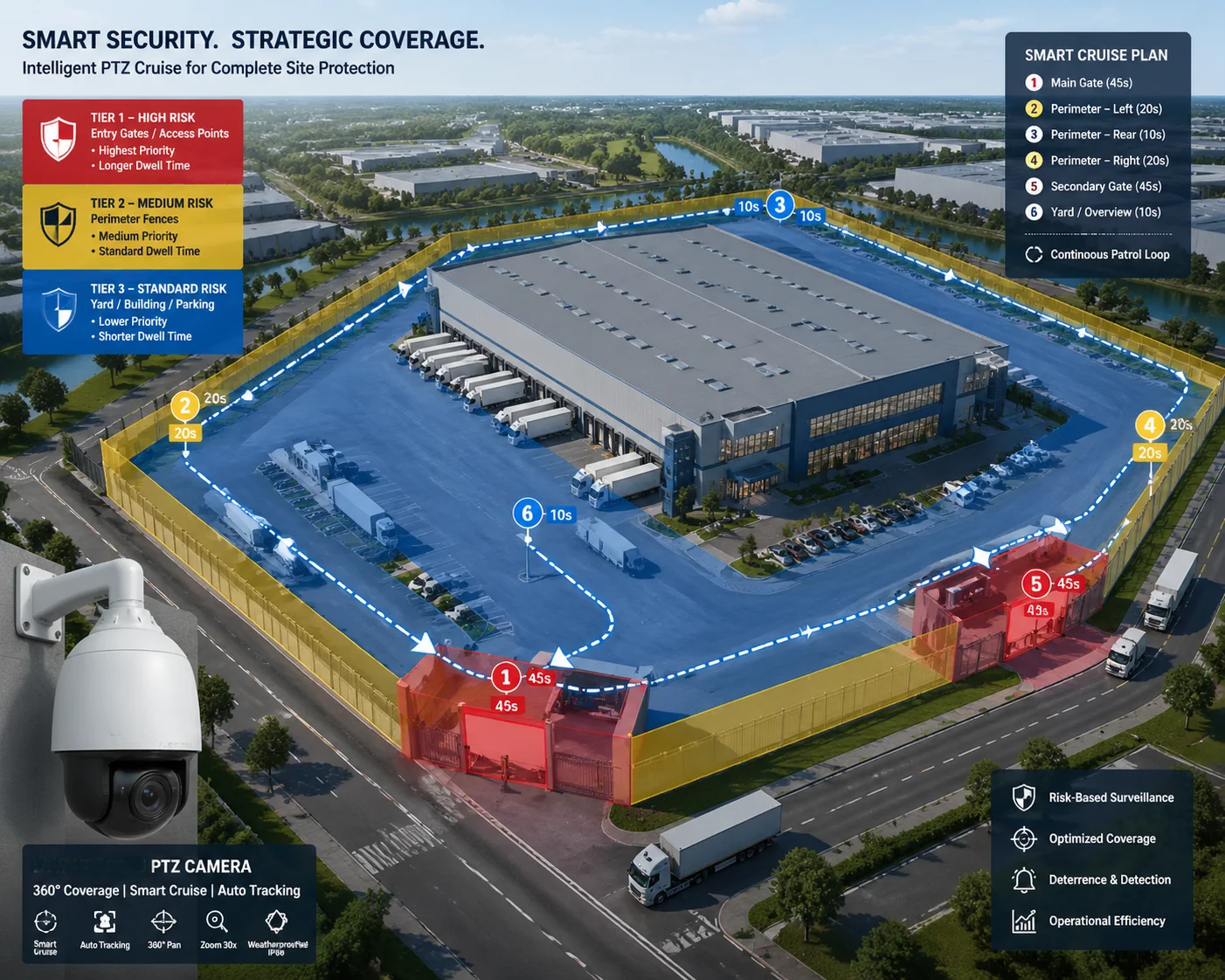
Priorização de predefinições por nível de risco
Nem todas as áreas de uma instalação precisam da mesma atenção. Um portão de entrada principal precisa de mais tempo de permanência do que uma parede lateral silenciosa. Recomendo classificar todas as posições predefinidas em três níveis de prioridade:
- Nível 1 (alto risco): Pontos de entrada, estacionamentos, docas de carga. Eles têm de 7 a 10 segundos de tempo de permanência.
- Nível 2 (risco médio): Linhas de cerca, corredores secundários, áreas de armazenamento. Esses têm 5 segundos.
- Nível 3 (baixo risco): Campos abertos sem ativos, áreas decorativas. Elas ganham 3 segundos ou são totalmente removidas da rota de cruzeiro.
Ao reduzir o número total de predefinições e dar mais tempo para as mais importantes, o ciclo de cruzeiro é concluído mais rapidamente e a IA tem dados suficientes em cada ponto crítico. Observei que essa abordagem aumentou as taxas gerais de detecção de 20% a 30% em sites que anteriormente usavam 15 ou mais predefinições com tempos de permanência de 2 segundos em toda a linha.
Mantenha o tempo de espera consistente entre os ciclos
Uma coisa que sempre verifico é se o tempo de espera permanece o mesmo de um ciclo para o outro. Alguns controladores PTZ mais baratos apresentam desvios de tempo. Eles podem manter uma predefinição por 5 segundos no primeiro ciclo e 3,2 segundos no próximo. Essa inconsistência prejudica a análise de IA que depende de regras baseadas em tempo, como detecção de ociosidade ou medição de tempo de fila.
Se o seu sistema PTZ apresentar desvio de tempo, sugiro mudar para um controlador ou NVR que use programação precisa baseada em ONVIF. Ou você pode usar nossas câmeras PTZ Loyalty-Secu, que têm um mecanismo de cruzeiro integrado com consistência de tempo de permanência em nível de milissegundos. Isso elimina a dependência de um controlador externo e garante que cada ciclo seja idêntico.
A precisão do retorno predefinido também é importante
Mesmo que o tempo de espera seja perfeito, a IA ainda falhará se a câmera não retornar ao mesmo ângulo exato todas as vezes. Se a predefinição 5 apontar para 45,0° no primeiro ciclo e 45,3° no ciclo seguinte, a zona de detecção virtual que você desenhou no VMS se deslocará no quadro. Os objetos que deveriam estar dentro da zona ficarão fora dela. A regra de IA não será acionada.
As câmeras PTZ de primeira linha oferecem precisão de retorno predefinido de ±0,1° ou melhor. Isso mantém o enquadramento da cena idêntico em centenas de ciclos. Nossas câmeras da Loyalty-Secu são construídas de acordo com esse padrão. A combinação de tempo de permanência estável e retorno preciso da predefinição proporciona à IA a consistência necessária para trabalhar de forma confiável, dia após dia.
Conclusão
A precisão do tempo de espera não é apenas uma configuração de PTZ. Ela é a base que decide se as detecções de IA são confiáveis ou inúteis. Se o tempo estiver correto, a IA funcionará. Se estiver errado, você estará pagando por um sistema inteligente que age às cegas.
1. Processamento de vários quadros com detecção de objetos em tempo real YOLO. ︎ 2. Tempo de estabilização do foco automático de detecção de fase para câmeras PTZ. ︎ 3. Consulta do status da posição predefinida do perfil S do ONVIF. ︎ 4. Votação em vários quadros para redução de falsos positivos em IA. ︎ 5. Tempo de amortecimento da vibração de estabilização do motor para cabeçotes PTZ. ︎ 6. Tempo mínimo de permanência para extração de recursos no reconhecimento facial. ︎ 7. Quadros de confirmação de caracteres de reconhecimento de placas de veículos. ︎ 8. Precisão do cálculo da janela de tempo de detecção de ociosidade. ︎ 9. Metadados ONVIF para posição PTZ e status de foco. ︎ 10. Tolerância de precisão de retorno predefinida para zonas de detecção virtual. ︎