
لقد رأيت معدلات اكتشاف الذكاء الاصطناعي تتعطل من 98% إلى 60% في مشاريع حقيقية. كان السبب الجذري هو نفسه دائمًا - إعدادات وقت السكون السيئة في مسار رحلة PTZ.
تتحكم دقة وقت السكون في مسارات الرحلات البحرية في عدد الإطارات الواضحة والمستقرة التي يحصل عليها محرك الذكاء الاصطناعي في كل موضع محدد مسبقًا. إذا كان وقت المكوث قصيرًا جدًا، أو بدأ مبكرًا جدًا، أو تغير بين الدورات، فإن الذكاء الاصطناعي سيفقد الأهداف، ويخلق نتائج سلبية كاذبة، ويعطي نتائج تحليلات غير موثوقة عبر الموقع بأكمله.
 دقة وقت مكوث كاميرا PTZ في الكاميرا PTZ مسار رحلة التعرف على الذكاء الاصطناعي
دقة وقت مكوث كاميرا PTZ في الكاميرا PTZ مسار رحلة التعرف على الذكاء الاصطناعي
فيما يلي، أقوم بتفصيل احتياجات التوقيت الدقيق، وطرق المزامنة، ومخاطر الكشف عن أوقات السكون القصيرة، وحيل التحسين التي يجب أن يعرفها كل مُدمج قبل نشر كاميرات PTZ التي تعمل بالذكاء الاصطناعي.
كم ثانية من الوقت اللازم للذكاء الاصطناعي لفحص مشهد جديد؟
كنت أضبط وقت المكوث على ثانيتين ثم أتساءل لماذا ظل الذكاء الاصطناعي الخاص بي يخطئ نصف الأهداف. أظهرت لي الرياضيات السبب.
تحتاج معظم خوارزميات الذكاء الاصطناعي إلى ما لا يقل عن 3 إلى 5 ثوانٍ من وقت السكون الثابت في كل إعداد مسبق. تذهب أول 0.5 إلى ثانية واحدة إلى التثبيت الميكانيكي والتركيز البؤري التلقائي. يوفر الباقي الإطارات الواضحة المتتالية التي يحتاجها الذكاء الاصطناعي لاكتشاف الهدف وتأكيده بشكل موثوق.
 وقت مكوث PTZ بالثواني اللازمة لمسح المشهد بالذكاء الاصطناعي
وقت مكوث PTZ بالثواني اللازمة لمسح المشهد بالذكاء الاصطناعي
فهم الميزانية الزمنية في كل إعداد مسبق
عندما تصل كاميرا PTZ إلى موضع جديد محدد مسبقاً، يجب أن تحدث عدة أشياء قبل أن يتمكن الذكاء الاصطناعي من القيام بأي عمل مفيد. أولاً، يتوقف المحرك. لكن جسم الكاميرا لا يتوقف على الفور. هناك دائماً بعض الاهتزازات المادية الناتجة عن التوقف المفاجئ. يمكن أن يستمر هذا الاهتزاز من 0.3 إلى 0.5 ثانية في معظم وحدات PTZ التجارية. خلال هذه الفترة، يكون لكل إطار تلتقطه الكاميرا ضبابية في الحركة. نماذج الذكاء الاصطناعي مثل يولو 1 أو أي كاشف تسريع TensorRT يحتاج إلى حواف حادة للعثور على الأجسام. الإطارات الضبابية عديمة الفائدة.
بعد استقرار الاهتزاز، يبدأ نظام التركيز التلقائي في العمل. حتى بسرعة PDAF (التركيز البؤري التلقائي لاكتشاف الطور) 2 تستغرق حوالي 0.3 إلى 0.5 ثانية لتثبيت المشهد. حتى يتم تثبيت التركيز البؤري، تكون الصورة ناعمة. لا يمكن للذكاء الاصطناعي استخراج ميزات مثل بنية الوجه أو أحرف لوحة الترخيص من صورة ناعمة.
لا يمكن للذكاء الاصطناعي الحصول على إطارات قابلة للاستخدام إلا بعد الانتهاء من التثبيت والتركيز البؤري. إليك كيفية تقسيم الميزانية الزمنية في كل إعداد مسبق:
| المرحلة | المدة | ما يحدث | سهولة استخدام الذكاء الاصطناعي |
|---|---|---|---|
| التثبيت الميكانيكي | 0.3 - 0.5 ثانية | يتوقف المحرك، ويخمد الاهتزاز | ❌ الإطارات ضبابية |
| قفل التركيز البؤري التلقائي | 0.3 - 0.5 ثانية | تتكيف العدسة مع عمق المشهد الجديد | ❌ الصورة ناعمة |
| نافذة التقاط الذكاء الاصطناعي | 2-3 ثوانٍ | تدفق إطارات واضحة ومستقرة إلى الذكاء الاصطناعي | ✅ صالح للكشف |
| المنطقة العازلة/إعادة المحاولة | 0.5-1 ثانية | يعالج تأخير الشبكة أو إعادة محاولة الخوارزمية | ✅ هامش الأمان |
| إجمالي الموصى به | 3-5 ثوانٍ | — | — |
لماذا 2 ثانية لا تكفي أبداً
أتحدث إلى شركات الدمج التي تحدد وقت السكون بثانيتين لأنهم يريدون تغطية المزيد من الإعدادات المسبقة في دورة كروز واحدة. يبدو المنطق سليمًا - المزيد من التوقفات يعني المزيد من التغطية. لكن الواقع مختلف.
إذا كان إجمالي وقت السكون ثانيتين، وكانت الكاميرا تقضي 0.5 ثانية في تخميد الاهتزاز و0.5 ثانية أخرى في التركيز البؤري التلقائي، فإن الذكاء الاصطناعي يحصل على ثانية واحدة فقط من اللقطات الواضحة. بمعدل 15 إطاراً في الثانية، أي 15 إطاراً فقط. تستخدم معظم خوارزميات الذكاء الاصطناعي طريقة التصويت متعدد الإطارات. فهي تحتاج إلى رؤية الهدف في 3 إلى 5 إطارات متتالية على الأقل قبل أن تضع علامة “مؤكد”. مع وجود 15 إطارًا فقط واحتمال وجود عوائق أو تغيرات في الإضاءة، غالبًا ما تفشل الخوارزمية في إكمال حلقة تأكيد التتبع والكشف.
والنتيجة بسيطة. يرى الذكاء الاصطناعي شيئًا ما، ولكن ليس لديه بيانات كافية ليقول “نعم، هذا شخص” أو “نعم، هذه مركبة”. لذلك يبقى صامتاً. ولا يتلقى المشغل التنبيه أبداً.
هل يمكنني مزامنة مشغل اكتشاف الذكاء الاصطناعي مع وصول الكاميرا إلى إعداد مسبق؟
لقد أمضيت ذات مرة أسبوعًا كاملاً في تصحيح أخطاء الاكتشافات الفائتة في مشروع محيط. كان الذكاء الاصطناعي يقوم بتشغيل المسح قبل أن تنتهي الكاميرا من التركيز.
نعم، المزامنة ممكنة. ولكن يجب أن يبدأ مشغل اكتشاف الذكاء الاصطناعي بعد أن تؤكد الكاميرا كلاً من التثبيت الميكانيكي وقفل التركيز التلقائي. يعد بدء تشغيل فحص الذكاء الاصطناعي عند إرسال أمر النقل - بدلاً من بدء تشغيله عندما تبلغ الكاميرا عن “الوصول إلى الموضع والتركيز” - هو الخطأ الوحيد الأكثر شيوعًا في التكامل.
 مزامنة مشغل الكشف بالذكاء الاصطناعي مزامنة وصول الإعداد المسبق PTZ
مزامنة مشغل الكشف بالذكاء الاصطناعي مزامنة وصول الإعداد المسبق PTZ
الفرق بين “تم إرسال الأمر” و“تم تأكيد الموقف”
هذا هو المكان الذي تسوء فيه العديد من المشاريع. في معظم أنظمة التحكم في PTZ، هناك حدثان منفصلان. الحدث الأول هو “إرسال الأمر”. هذه هي اللحظة التي تخبر فيها وحدة التحكم الكاميرا بالانتقال إلى الإعداد المسبق 5. الحدث الثاني هو “تأكيد الموضع”. هذه هي اللحظة التي تبلغ فيها الكاميرا أنها قد وصلت وتوقفت عن الحركة وأغلقت التركيز البؤري.
تكمن المشكلة في أن العديد من منصات NVR و VMS تبدأ العد التنازلي لوقت السكون من “الأمر المرسل”. هذا يعني أن الساعة تعمل بالفعل بينما لا تزال الكاميرا تدور. وبحلول الوقت الذي تتوقف فيه الكاميرا بالفعل وتركز، يكون جزء كبير من وقت السكون قد انتهى بالفعل.
أوصي دائمًا بالتحقق مما إذا كان بروتوكول PTZ الخاص بك يدعم رد استدعاء “تم الوصول إلى الموضع” أو علامة الحالة. ملف تعريف ONVIF S 3, ، على سبيل المثال، تدعم استعلامات حالة الموضع المحددة مسبقًا. إذا كان نظامك يستطيع قراءة هذه العلامة، يمكنك إنشاء قاعدة منطقية بسيطة. تنص القاعدة على: “لا تبدأ المسح بالذكاء الاصطناعي حتى تؤكد الكاميرا أنها في الموضع المستهدف وأن التركيز البؤري مقفل.”
كيفية المقارنة بين طرق المزامنة المختلفة
لا تقدم جميع أنظمة PTZ نفس المستوى من المزامنة. فيما يلي مقارنة بين الأساليب الشائعة التي أراها في هذا المجال:
| طريقة المزامنة | كيف تعمل | الإيجابيات | السلبيات |
|---|---|---|---|
| قائم على المؤقت (تأخير ثابت) | بدء فحص الذكاء الاصطناعي بعد مرور X ثانية من أمر النقل | سهولة الإعداد | لا يتكيف مع أوقات الحركة المتغيرة |
| استطلاع حالة ONVIF ONVIF | يتحقق من علامة الحالة المحددة مسبقاً كل 200 مللي ثانية | دقيق للكاميرات المدعومة | تضيف نفقات إضافية طفيفة على الشبكة |
| مُشغِّل التشفير | يبدأ الذكاء الاصطناعي عند تأكيد أداة التشفير استقرار الفيديو | موثوقة للغاية | يتطلب التكامل على مستوى التشفير |
| المعايرة اليدوية | يختبر المشغل ويضبط التأخير حسب الإعداد المسبق | يعمل على أي نظام | مستهلك للوقت وغير قابل للتطوير |
النهج المفضل لديّ
بالنسبة للمشاريع التي أستخدم فيها كاميراتنا من نوع Loyalty-Secu PTZ، أفضل طريقة التشفير المشغّل. تبلغ كاميراتنا عن علامة فيديو ثابتة بمجرد توقف المحرك واكتمال دورة PDAF. تمر هذه العلامة عبر البيانات الوصفية لدفق RTSP. تقرأ الواجهة الخلفية للذكاء الاصطناعي هذه العلامة ولا تبدأ نافذة الكشف الخاصة بها إلا بعد استلامها. بهذه الطريقة، لا أضيع وقت السكون على إطارات ضبابية أو غير مركزة. كل ثانية من وقت السكون هي ثانية منتجة للذكاء الاصطناعي.
إذا كان نظام إدارة الفيديو لا يدعم تحليل البيانات الوصفية، أعود إلى طريقة التأخير الثابت. لكنني دائمًا ما أضيف دائمًا هامش أمان مدته ثانية واحدة فوق وقت التثبيت المقاس. من الأفضل أن أفقد ثانية واحدة من التغطية بدلاً من فقدان الكشف بالكامل عند هذا الإعداد المسبق.
هل سيؤدي وقت المكوث القصير إلى تفويت الذكاء الاصطناعي لتنبيهات اكتشاف الإنسان أو المركبات؟
لقد تلقيت مكالمة من عميل في الساعة 2 صباحًا لأن الذكاء الاصطناعي المحيط بهم لم يلتقط دخيلًا يمشي في موقف للسيارات. تم ضبط وقت المكوث على 1.5 ثانية.
نعم. يؤدي وقت المكوث القصير مباشرةً إلى اكتشافات مفقودة. تستخدم خوارزميات الذكاء الاصطناعي التصويت متعدد الإطارات لتأكيد الأهداف. إذا تحركت الكاميرا بعيدًا قبل أن تنتهي الخوارزمية من دورة الكشف والتأكيد على المسار-التعقب، سينتج النظام نتائج سلبية خاطئة. تمشي التهديدات الحقيقية في المشهد دون أن يتم اكتشافها.
 فترة مكوث قصيرة لم يكتشف فيها الذكاء الاصطناعي المركبات البشرية المفقودة
فترة مكوث قصيرة لم يكتشف فيها الذكاء الاصطناعي المركبات البشرية المفقودة
كيفية عمل التصويت متعدد الأطر
لا تعتمد معظم أنظمة اكتشاف الذكاء الاصطناعي الحديثة على إطار واحد. يمكن أن يحتوي الإطار الواحد على ظلال أو انعكاسات أو أشكال غريبة تشبه الشخص ولكنها ليست كذلك. لتجنب هذه الإنذارات الخاطئة، يستخدم الذكاء الاصطناعي طريقة تسمى التصويت متعدد الإطارات.
تعمل العملية على النحو التالي. يقوم الذكاء الاصطناعي بتشغيل نموذج الكشف الخاص به على الإطار 1. يعثر على شكل يشبه الإنسان بثقة 72%. لا يُطلق تنبيهًا بعد. في الإطار 2، يعثر على نفس الشكل في موضع مشابه بثقة 78%. في الإطار 3، 81%. في الإطار 4، 85%. بعد رؤية الهدف في 3 إلى 5 إطارات متتالية بثقة متزايدة أو مستقرة، تضع الخوارزمية علامة “هدف مؤكد” وترسل تنبيهًا.
تستغرق هذه العملية وقتاً. عند 15 إطاراً في الثانية، تستغرق خمسة إطارات حوالي 0.33 ثانية. يبدو ذلك سريعاً. لكن تذكر أن هذه مجرد خطوة التصويت. قبل أن يبدأ التصويت، تحتاج الخوارزمية أيضًا إلى تهيئة المتعقب الخاص بها، وبناء مربع محدّد، ومقارنة الهدف بفئات النموذج الخاص به. غالبًا ما تستغرق حلقة الكشف-التعقب-التأكيد الكاملة من ثانية إلى ثانيتين من الفيديو النظيف.
ما الذي يحدث عندما تقطع الدورة التدريبية؟
إذا كان وقت السكون 1.5 ثانية فقط وفقدت أول 0.8 ثانية للتثبيت والتركيز البؤري، فإن الذكاء الاصطناعي يحصل على 0.7 ثانية فقط من الفيديو النظيف. هذا حوالي 10 إطارات بمعدل 15 إطارًا في الثانية. تبدأ الخوارزمية اكتشافها في الإطار 1. وبحلول الإطار 5، فإنها تبني الثقة. بحلول الإطار 10، قد تكون قريبة من التأكيد. لكن بعد ذلك تتحرك الكاميرا. يختفي الهدف من الإطار. يفقد المتعقب الجسم. تتم إعادة تعيين درجة الثقة.
لا يطلق الذكاء الاصطناعي الإنذار أبدًا. كان الهدف هناك. رأته الكاميرا. لكن الخوارزمية لم يكن لديها الوقت الكافي لتقول “تم التأكيد”. هذه سلبية كاذبة. والسلبيات الكاذبة أخطر بكثير من الإيجابيات الكاذبة. الإيجابية الكاذبة هي تنبيه إضافي مزعج. أما السلبية الكاذبة فهي دخيل مفقود.
التأثير على مهام الكشف المختلفة
ليست كل مهام الذكاء الاصطناعي لها نفس احتياجات التوقيت. فالتعرّف على لوحة الترخيص (LPR) أكثر تطلبًا من الاكتشاف البشري البسيط لأن الخوارزمية تحتاج إلى قراءة الأحرف الفردية. فيما يلي دليل تقريبي يستند إلى خبرتي في المشروع:
| مهمة الذكاء الاصطناعي | الحد الأدنى من الإطارات الواضحة المطلوبة | الحد الأدنى لزمن المكوث الفعال | المخاطر إذا كانت مدة المكوث قصيرة جداً |
|---|---|---|---|
| الكشف البشري | 3-5 إطارات | 2-3 ثوانٍ | تنبيهات الدخلاء الفائتة |
| الكشف عن المركبات | 3-5 إطارات | 2-3 ثوانٍ | سجلات دخول المركبات الفائتة |
| التعرف على لوحة السيارة | 8-15 إطاراً | 4-5 ثوانٍ | أحرف اللوحة غير مقروءة |
| التعرف على الوجه | 10-20 إطاراً | 5-7 ثوانٍ | فشل مطابقة الهوية الفاشلة |
| التحليل السلوكي (التسكع) | أكثر من 30 إطاراً | 5-10 ثوانٍ | حسابات وقت التسكع الخاطئة |
يوضح هذا الجدول شيئًا واحدًا واضحًا للغاية. كلما زادت التفاصيل التي يحتاج الذكاء الاصطناعي إلى استخراجها، زاد الوقت الذي يحتاجه. ويجب أن يكون هذا الوقت نظيفًا ومستقرًا ومركّزًا. لا يوجد اختصار.
كيف يمكنني تحسين جدول الرحلات البحرية لتحقيق التوازن بين منطقة التغطية ودقة الذكاء الاصطناعي؟
دائماً ما أقول لعملائي هذا: المزيد من الإعدادات المسبقة لا تعني أماناً أفضل. في بعض الأحيان، يمنحك عدد أقل من التوقفات مع فترات مكوث أطول نتائج أفضل بكثير في العالم الحقيقي.
لتحقيق التوازن بين منطقة التغطية ودقة الذكاء الاصطناعي، قلل عدد الإعدادات المسبقة إلى المناطق ذات الأولوية العالية فقط، وامنح كل محطة 5 ثوانٍ على الأقل من وقت المكوث، واتبع قاعدة الثواني الخمس - ثانية واحدة للتثبيت، و3 ثوانٍ لالتقاط الذكاء الاصطناعي، وثانية واحدة للتخزين المؤقت ضد تأخيرات الشبكة أو المعالجة.
 تحسين تغطية جدول الرحلات البحرية المتوازنة التغطية بدقة الذكاء الاصطناعي
تحسين تغطية جدول الرحلات البحرية المتوازنة التغطية بدقة الذكاء الاصطناعي
قاعدة الخمس ثوانٍ
أستخدم إطار عمل بسيط لكل مسار رحلة بحرية أقوم بتكوينه. أسميها قاعدة الخمس ثوانٍ. وهي تقسم كل فترة مكوث إلى ثلاث مراحل:
- الثانية 1: تستقر الكاميرا. يتوقف اهتزاز المحرك. يقفل PDAF التركيز البؤري. لا يحدث أي عمل مفيد للذكاء الاصطناعي هنا.
- الثواني من 2 إلى 4: هذه هي نافذة التقاط الذكاء الاصطناعي الأساسية. عند 15 إطارًا في الثانية، يحصل الذكاء الاصطناعي على 45 إطارًا نظيفًا. هذا كافٍ لرصد البشر، ورصد المركبات، وحتى التقاط الصور الأساسية في الإضاءة الجيدة.
- الثانية 5: هذه هي منطقة المخزن المؤقت. وهي تعالج زمن انتقال الشبكة بين الكاميرا ومسجل فيديو الشبكة وأي دورات إعادة محاولة خوارزمية وتأخيرات الترميز الطفيفة.
هذه القاعدة ليست مثالية لكل سيناريو. بالنسبة للتعرف على الوجوه أو التحليل السلوكي، أقوم بتمديد وقت المكوث إلى 7 أو حتى 10 ثوانٍ. ولكن بالنسبة لأمن المحيط القياسي مع الكشف عن البشر والمركبات، فإن 5 ثوانٍ لكل إعداد مسبق هو خط أساس قوي.
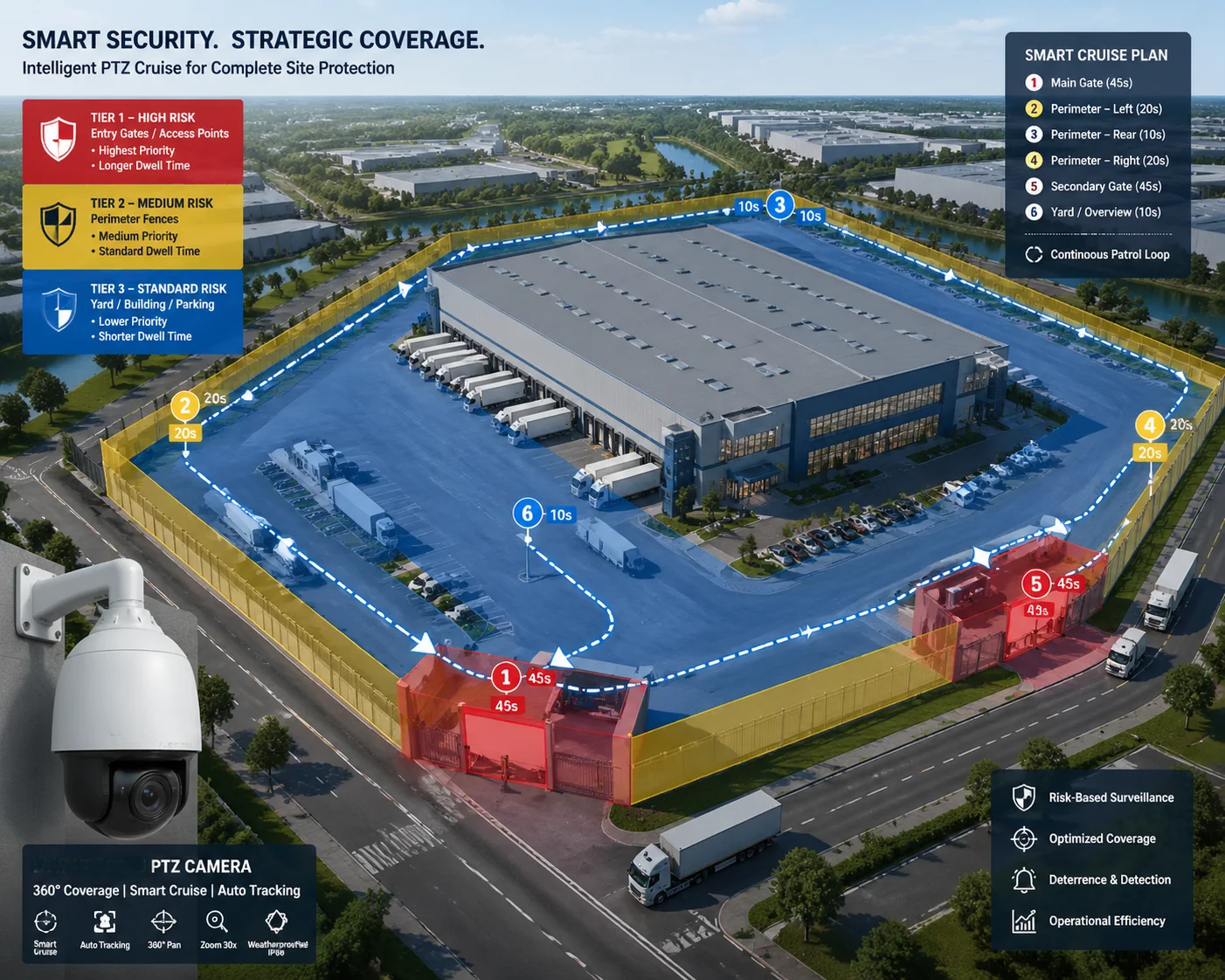
تحديد أولويات الإعدادات المسبقة حسب مستوى المخاطر
لا تحتاج كل منطقة في المنشأة إلى نفس الاهتمام. فبوابة المدخل الرئيسي تحتاج إلى وقت مكوث أكثر من الحائط الجانبي الهادئ. أوصي بتصنيف جميع المواضع المحددة مسبقاً إلى ثلاثة مستويات ذات أولوية:
- المستوى 1 (عالي الخطورة): نقاط الدخول، ومواقف السيارات، وأرصفة التحميل. هذه تحصل على 7 إلى 10 ثوانٍ من وقت المكوث.
- المستوى 2 (متوسط المخاطر): خطوط السياج، والممرات الثانوية، ومناطق التخزين. تحصل هذه على 5 ثوانٍ.
- المستوى 3 (منخفض المخاطر): حقول مفتوحة بدون أصول ومناطق زخرفية. تحصل هذه على 3 ثوانٍ أو تُزال من مسار الرحلة بالكامل.
من خلال تقليل العدد الإجمالي للإعدادات المسبقة وإعطاء المزيد من الوقت للإعدادات المهمة، تكتمل دورة الرحلة بشكل أسرع ويكون لدى الذكاء الاصطناعي بيانات كافية في كل نقطة حرجة. لقد رأيت أن هذا النهج يزيد من معدلات الاكتشاف الإجمالية بمقدار 20% إلى 30% في المواقع التي كانت تستخدم سابقًا 15 إعدادًا مسبقًا أو أكثر مع فترات مكوث مدتها ثانيتان في جميع المجالات.
حافظ على اتساق وقت المكوث بين الدورات
أحد الأشياء التي أتحقق منها دائمًا هو ما إذا كان وقت السكون يظل كما هو من دورة إلى أخرى. تحتوي بعض وحدات تحكم PTZ الأرخص ثمناً على انحراف في التوقيت. قد يحتفظون بإعداد مسبق لمدة 5 ثوانٍ في الدورة الأولى و3.2 ثانية في الدورة التالية. يؤدي هذا التناقض إلى تعطيل تحليلات الذكاء الاصطناعي التي تعتمد على القواعد المستندة إلى الوقت، مثل اكتشاف التباطؤ أو قياس وقت الانتظار.
إذا أظهر نظام PTZ الخاص بك انجرافًا في التوقيت، أقترح التبديل إلى وحدة تحكم أو مسجل فيديو شبكي يستخدم جدولة دقيقة قائمة على ONVIF. أو يمكنك استخدام كاميرات Loyalty-Secu PTZ الخاصة بنا، والتي تحتوي على محرك مدمج للرحلات البحرية مع اتساق وقت السكون على مستوى المللي ثانية. هذا يزيل الاعتماد على وحدة تحكم خارجية ويضمن أن تكون كل دورة متطابقة.
دقة الإرجاع المضبوطة مسبقًا مهمة أيضًا
حتى لو كان وقت المكوث مثاليًا، سيظل الذكاء الاصطناعي يفشل إذا لم تعد الكاميرا إلى نفس الزاوية بالضبط في كل مرة. إذا كان الإعداد المسبق 5 يشير إلى 45.0 درجة في الدورة الأولى و45.3 درجة في الدورة التالية، فإن منطقة الكشف الافتراضية التي رسمتها في نظام إدارة الفيديو ستتحول في الإطار. الأجسام التي يجب أن تكون داخل المنطقة ستقع خارجها. لن تعمل قاعدة الذكاء الاصطناعي.
توفر كاميرات PTZ من الدرجة الأولى دقة إرجاع محددة مسبقًا تبلغ ± 0.1 درجة أو أفضل. وهذا يحافظ على تطابق تأطير المشهد عبر مئات الدورات. تم تصميم كاميراتنا في Loyalty-Secu وفقًا لهذا المعيار. إن الجمع بين وقت السكون المستقر والعودة الدقيقة المضبوطة مسبقًا يمنح الذكاء الاصطناعي الاتساق الذي يحتاجه للعمل بشكل موثوق يومًا بعد يوم.
الخاتمة
دقة وقت السكون ليست مجرد إعدادات PTZ. إنها الأساس الذي يقرر ما إذا كانت اكتشافات الذكاء الاصطناعي الخاصة بك موثوقة أو عديمة الفائدة. احصل على التوقيت الصحيح، وسيعمل الذكاء الاصطناعي. إذا أخطأت، فستدفع مقابل نظام ذكي يعمل بشكل أعمى.
1. معالجة متعددة الإطارات للكشف عن الأجسام في الوقت الحقيقي YOLO. ︎ 2. وقت ضبط التركيز البؤري التلقائي لاكتشاف الطور لكاميرات PTZ. ︎ 3. الاستعلام عن حالة الموضع المضبوط مسبقاً ONVIF Profile S. ︎ 4. التصويت متعدد الأطر للحد من التصويت الإيجابي الخاطئ في الذكاء الاصطناعي. ︎ 5. وقت تخميد اهتزاز استقرار المحرك لرؤوس PTZ. ︎ 6. الحد الأدنى من الوقت الذي يستغرقه التعرف على الوجوه لاستخراج السمات. ︎ 7. إطارات تأكيد شخصية التعرف على لوحة الترخيص. ︎ 8. دقة حساب النافذة الزمنية لاكتشاف التباطؤ في كشف التباطؤ. ︎ 9. البيانات الوصفية لـ ONVIF لموضع PTZ وحالة التركيز البؤري. ︎ 10. تفاوت دقة الإرجاع المضبوط مسبقاً لمناطق الكشف الافتراضية. ︎