
Ich habe bei echten Projekten AI-Erkennungsraten von 98% bis hinunter zu 60% gesehen. Die Grundursache war immer dieselbe - schlechte Verweilzeiteinstellungen im PTZ-Fahrweg.
Die Genauigkeit der Verweilzeit in den Fahrwegen steuert, wie viele klare, stabile Bilder die KI-Engine an jeder voreingestellten Position erhält. Wenn die Verweilzeit zu kurz ist, zu früh beginnt oder sich zwischen den Zyklen ändert, verfehlt die KI Ziele, erzeugt falsche Negative und liefert unzuverlässige Analyseergebnisse für die gesamte Website.
 PTZ-Kamera Verweildauer Genauigkeit AI-Erkennung Fahrstrecke
PTZ-Kamera Verweildauer Genauigkeit AI-Erkennung Fahrstrecke
Im Folgenden erläutere ich die genauen Anforderungen an das Timing, die Synchronisierungsmethoden, die Erkennungsrisiken bei kurzen Verweilzeiten und die Optimierungstricks, die jeder Integrator kennen sollte, bevor er KI-gesteuerte PTZ-Kameras einsetzt.
Wie viele Sekunden Verweildauer sind nötig, damit die KI eine neue Szene scannen kann?
Früher habe ich die Verweilzeit auf 2 Sekunden eingestellt und mich dann gewundert, warum meine KI immer die Hälfte der Ziele verfehlte. Die Mathematik zeigte mir, warum.
Die meisten AI-Algorithmen benötigen bei jeder Voreinstellung mindestens 3 bis 5 Sekunden stabile Verweilzeit. Die ersten 0,5 bis 1 Sekunde werden für die mechanische Stabilisierung und den Autofokus verwendet. Der Rest liefert die aufeinanderfolgenden klaren Bilder, die die KI für eine zuverlässige Zielerfassung und -bestätigung benötigt.
 PTZ-Verweilzeit Sekunden AI-Szenenabtastung erforderlich
PTZ-Verweilzeit Sekunden AI-Szenenabtastung erforderlich
Verstehen des Zeitbudgets bei jeder Voreinstellung
Wenn eine PTZ-Kamera an einer neuen voreingestellten Position ankommt, müssen mehrere Dinge geschehen, bevor die KI eine sinnvolle Arbeit leisten kann. Zunächst wird der Motor angehalten. Das Kameragehäuse hält jedoch nicht sofort an. Durch den plötzlichen Stillstand kommt es immer zu einer gewissen physischen Vibration. Diese Vibration kann bei den meisten handelsüblichen PTZ-Einheiten 0,3 bis 0,5 Sekunden andauern. Während dieses Zeitraums ist jedes Bild, das die Kamera aufnimmt, mit Bewegungsunschärfe behaftet. AI-Modelle wie YOLO 1 oder jeder TensorRT-beschleunigte Detektor brauchen scharfe Kanten, um Objekte zu finden. Unscharfe Bilder sind nutzlos.
Nachdem sich die Vibration beruhigt hat, schaltet sich das Autofokussystem ein. Auch schnell PDAF (Phase Detection Auto-Focus) 2 braucht etwa 0,3 bis 0,5 Sekunden, um das Motiv zu erfassen. Bis die Schärfe eingestellt ist, ist das Bild weich. Die KI kann aus einem unscharfen Bild keine Merkmale wie Gesichtsstrukturen oder Nummernschilder extrahieren.
Erst wenn sowohl die Stabilisierung als auch die Fokussierung abgeschlossen sind, erhält die KI brauchbare Bilder. Hier sehen Sie, wie sich das Zeitbudget bei jeder Voreinstellung aufteilt:
| Phase | Dauer | Was passiert | AI-Nutzbarkeit |
|---|---|---|---|
| Mechanische Stabilisierung | 0,3-0,5 Sekunden | Motor stoppt, Vibration wird gedämpft | ❌ Bilder sind unscharf |
| Auto-Fokus-Sperre | 0,3-0,5 Sekunden | Das Objektiv passt sich der neuen Szenentiefe an | ❌ Bild ist weich |
| AI-Erfassungsfenster | 2-3 Sekunden | Klarer, stabiler Framestream zu AI | ✅ Gültig für den Nachweis |
| Puffer-/Wiederholungszone | 0,5-1 Sekunde | Behandelt Netzwerkverzögerungen oder Algorithmus-Neuversuche | ✅ Sicherheitsmarge |
| Insgesamt empfohlen | 3-5 Sekunden | — | — |
Warum 2 Sekunden fast nie ausreichen
Ich spreche mit Integratoren, die die Verweilzeit auf 2 Sekunden festlegen, weil sie in einem einzigen Fahrzyklus mehr Voreinstellungen abdecken wollen. Die Logik scheint schlüssig - mehr Stopps bedeuten mehr Abdeckung. Aber die Realität sieht anders aus.
Wenn die Gesamtverweildauer 2 Sekunden beträgt und die Kamera 0,5 Sekunden für die Vibrationsdämpfung und weitere 0,5 Sekunden für den Autofokus aufwendet, erhält die KI nur 1 Sekunde an klarem Bildmaterial. Bei 15 FPS sind das gerade einmal 15 Bilder. Die meisten KI-Algorithmen verwenden ein Verfahren zur Abstimmung mehrerer Bilder. Sie müssen ein Ziel in mindestens 3 bis 5 aufeinanderfolgenden Bildern sehen, bevor sie es als “bestätigt” markieren. Bei nur 15 Bildern und möglichen Hindernissen oder Beleuchtungsänderungen gelingt es dem Algorithmus oft nicht, seine Erkennungs-, Verfolgungs- und Bestätigungsschleife abzuschließen.
Das Ergebnis ist einfach. Die KI sieht etwas, aber sie hat nicht genügend Daten, um zu sagen: “Ja, das ist eine Person” oder “Ja, das ist ein Fahrzeug”. Also bleibt sie stumm. Und der Bediener erhält nie den Alarm.
Kann ich den Auslöser der AI-Erkennung mit der Ankunft der Kamera an einem Preset synchronisieren?
Ich habe einmal eine ganze Woche damit verbracht, fehlende Erkennungen bei einem Perimeter-Projekt zu beheben. Die KI löste ihren Scan aus, bevor die Kamera überhaupt fokussiert hatte.
Ja, eine Synchronisierung ist möglich. Aber der Auslöser für die KI-Erkennung muss starten, nachdem die Kamera sowohl die mechanische Stabilisierung als auch die Autofokussperre bestätigt hat. Der häufigste Fehler bei der Integration besteht darin, den AI-Scan zu starten, wenn der Bewegungsbefehl gesendet wird - und nicht, wenn die Kamera “Position erreicht und fokussiert” meldet.
 AI-Erkennungsauslöser synchronisieren PTZ-Voreinstellung Ankunft
AI-Erkennungsauslöser synchronisieren PTZ-Voreinstellung Ankunft
Der Unterschied zwischen “Befehl gesendet” und “Position bestätigt”
Genau hier gehen viele Projekte schief. Bei den meisten PTZ-Steuerungssystemen gibt es zwei getrennte Ereignisse. Das erste Ereignis ist “Befehl gesendet”. Dies ist der Moment, in dem das Steuergerät der Kamera mitteilt, dass sie zur Voreinstellung 5 gehen soll. Das zweite Ereignis ist “Position bestätigt”. Dies ist der Moment, in dem die Kamera zurückmeldet, dass sie angekommen ist, sich nicht mehr bewegt und den Fokus eingestellt hat.
Das Problem ist, dass viele NVR- und VMS-Plattformen den Countdown für die Verweilzeit ab “Befehl gesendet” starten. Das bedeutet, dass die Uhr bereits läuft, während sich die Kamera noch dreht. Bis die Kamera tatsächlich anhält und fokussiert, ist bereits ein großer Teil der Verweilzeit verstrichen.
Ich empfehle immer zu prüfen, ob Ihr PTZ-Protokoll einen Rückruf oder ein Statusflag “Position erreicht” unterstützt. ONVIF-Profil S 3, unterstützt zum Beispiel die Abfrage des voreingestellten Positionsstatus. Wenn Ihr System dieses Flag lesen kann, können Sie eine einfache Logikregel erstellen. Die Regel lautet: “Starten Sie den AI-Scan erst, wenn die Kamera bestätigt, dass sie sich an der Zielposition befindet und der Fokus gesperrt ist.”
Unterschiedliche Synchronisationsmethoden im Vergleich
Nicht alle PTZ-Systeme bieten das gleiche Maß an Synchronisierung. Hier ist ein Vergleich der gängigen Ansätze, die ich in der Praxis sehe:
| Sync-Methode | Wie es funktioniert | Profis | Nachteile |
|---|---|---|---|
| Timer-basiert (feste Verzögerung) | Startet AI-Scan X Sekunden nach Bewegungsbefehl | Einfach einzurichten | Passt sich nicht an variable Umzugszeiten an |
| ONVIF-Statusabfrage | Prüft das voreingestellte Statusflag alle 200ms | Präzise für unterstützte Kameras | Geringfügiger zusätzlicher Netzwerk-Overhead |
| Encoder-gesteuert | AI startet, wenn der Encoder ein stabiles Video bestätigt | Sehr zuverlässig | Erfordert Integration auf Encoderebene |
| Manuelle Kalibrierung | Bediener testet und stellt Verzögerung pro Voreinstellung ein | Funktioniert auf jedem System | Zeitaufwendig, nicht skalierbar |
Mein bevorzugter Ansatz
Bei Projekten, bei denen ich unsere Loyalty-Secu-PTZ-Kameras verwende, bevorzuge ich die Encoder-getriggerte Methode. Unsere Kameras melden ein stabiles Videoflag, sobald der Motor angehalten hat und der PDAF-Zyklus abgeschlossen ist. Dieses Flag wird in den Metadaten des RTSP-Streams angezeigt. Das AI-Backend liest dieses Flag und startet sein Erkennungsfenster erst, nachdem es dieses Flag erhalten hat. Auf diese Weise verschwende ich keine Verweilzeit mit unscharfen oder unscharfen Bildern. Jede Sekunde Verweilzeit ist eine produktive Sekunde für die KI.
Wenn das VMS das Parsen von Metadaten nicht unterstützt, greife ich auf eine feste Verzögerungsmethode zurück. Ich füge jedoch immer eine Sicherheitsmarge von 1 Sekunde zur gemessenen Stabilisierungszeit hinzu. Es ist besser, 1 Sekunde der Erfassung zu verlieren, als die gesamte Erkennung bei dieser Voreinstellung zu verlieren.
Kann eine kurze Verweilzeit dazu führen, dass meine KI Alarme zur Erkennung von Menschen oder Fahrzeugen verpasst?
Ein Kunde rief mich nachts um 2 Uhr an, weil seine KI einen Eindringling übersehen hatte, der über einen Parkplatz lief. Die Verweilzeit war auf 1,5 Sekunden eingestellt.
Ja. Eine kurze Verweilzeit führt direkt zu verpassten Erkennungen. KI-Algorithmen verwenden zur Bestätigung von Zielen die Abstimmung mehrerer Bilder. Wenn sich die Kamera wegbewegt, bevor der Algorithmus seinen Erkennungs-, Verfolgungs- und Bestätigungszyklus abgeschlossen hat, erzeugt das System falsch negative Ergebnisse. Echte Bedrohungen laufen unerkannt durch die Szene.
 kurze Verweilzeit AI verpasste menschliche Fahrzeugerkennung
kurze Verweilzeit AI verpasste menschliche Fahrzeugerkennung
So funktioniert die Multi-Frame-Abstimmung
Die meisten modernen KI-Erkennungssysteme verlassen sich nicht auf ein Einzelbild. Ein Einzelbild kann Schatten, Reflexionen oder seltsame Formen enthalten, die wie eine Person aussehen, es aber nicht sind. Um diese Fehlalarme zu vermeiden, verwendet die KI eine Methode namens Multi-Frame-Voting.
Der Prozess läuft folgendermaßen ab. Die KI führt ihr Erkennungsmodell auf Bild 1 aus. Sie findet eine Form, die mit 72% Sicherheit wie ein Mensch aussieht. Sie löst noch keinen Alarm aus. Auf Bild 2 findet sie die gleiche Form in einer ähnlichen Position mit 78% Konfidenz. Bei Bild 3: 81%. Bei Frame 4: 85%. Nachdem das Ziel in 3 bis 5 aufeinanderfolgenden Frames mit steigender oder stabiler Konfidenz gesehen wurde, markiert der Algorithmus es als “bestätigtes Ziel” und sendet die Warnung.
Dieser Prozess braucht Zeit. Bei 15 FPS dauern fünf Bilder etwa 0,33 Sekunden. Das klingt schnell. Aber bedenken Sie, dass dies nur der Schritt der Abstimmung ist. Bevor die Abstimmung beginnt, muss der Algorithmus auch seinen Tracker initialisieren, einen Begrenzungsrahmen erstellen und das Ziel mit seinen Modellklassen vergleichen. Die gesamte Erkennungs-, Verfolgungs- und Bestätigungsschleife dauert oft 1 bis 2 Sekunden bei sauberem Video.
Was passiert, wenn man den Zyklus abbricht
Wenn die Verweilzeit nur 1,5 Sekunden beträgt und die ersten 0,8 Sekunden für die Stabilisierung und Fokussierung verloren gehen, erhält die KI nur 0,7 Sekunden sauberes Video. Das sind etwa 10 Bilder bei 15 FPS. Der Algorithmus beginnt seine Erkennung bei Bild 1. Bei Bild 5 gewinnt er an Vertrauen. Bei Bild 10 könnte er kurz vor der Bestätigung stehen. Doch dann bewegt sich die Kamera. Das Ziel verschwindet aus dem Bild. Der Tracker verliert das Objekt. Der Vertrauenswert wird zurückgesetzt.
Die KI hat den Alarm nie ausgelöst. Das Ziel war da. Die Kamera hat es gesehen. Aber der Algorithmus hatte nicht genug Zeit, um “bestätigt” zu sagen. Dies ist ein falsches Negativ. Und falsche Negativmeldungen sind weitaus gefährlicher als falsche Positivmeldungen. Ein falsches Positiv ist ein lästiger zusätzlicher Alarm. Ein falsches Negativ ist ein übersehener Eindringling.
Die Auswirkungen auf verschiedene Detektionsaufgaben
Nicht alle KI-Aufgaben haben die gleichen zeitlichen Anforderungen. Die Kennzeichenerkennung (LPR) ist anspruchsvoller als die einfache Erkennung von Menschen, da der Algorithmus einzelne Zeichen lesen muss. Hier ist ein grober Leitfaden, der auf meiner Projekterfahrung beruht:
| AI-Aufgabe | Mindestens benötigte freie Rahmen | Effektive Mindestverweildauer | Risiko bei zu kurzer Verweilzeit |
|---|---|---|---|
| Erkennung von Menschen | 3-5 Rahmen | 2-3 Sekunden | Verpasste Einbrecherwarnungen |
| Fahrzeugerkennung | 3-5 Rahmen | 2-3 Sekunden | Protokolle über versäumte Fahrzeugeinfahrten |
| Nummernschild-Erkennung | 8-15 Bilder | 4-5 Sekunden | Unleserliche Schriftzeichen |
| Gesichtserkennung | 10-20 Bilder | 5-7 Sekunden | Identitätsabgleich fehlgeschlagen |
| Verhaltensanalyse (Herumlungern) | 30+ Rahmen | 5-10 Sekunden | Falsche Berechnung der Verweilzeit |
Diese Tabelle macht eines sehr deutlich. Je mehr Details die KI extrahieren muss, desto mehr Zeit braucht sie. Und diese Zeit muss sauber, stabil und fokussiert sein. Es gibt keine Abkürzung.
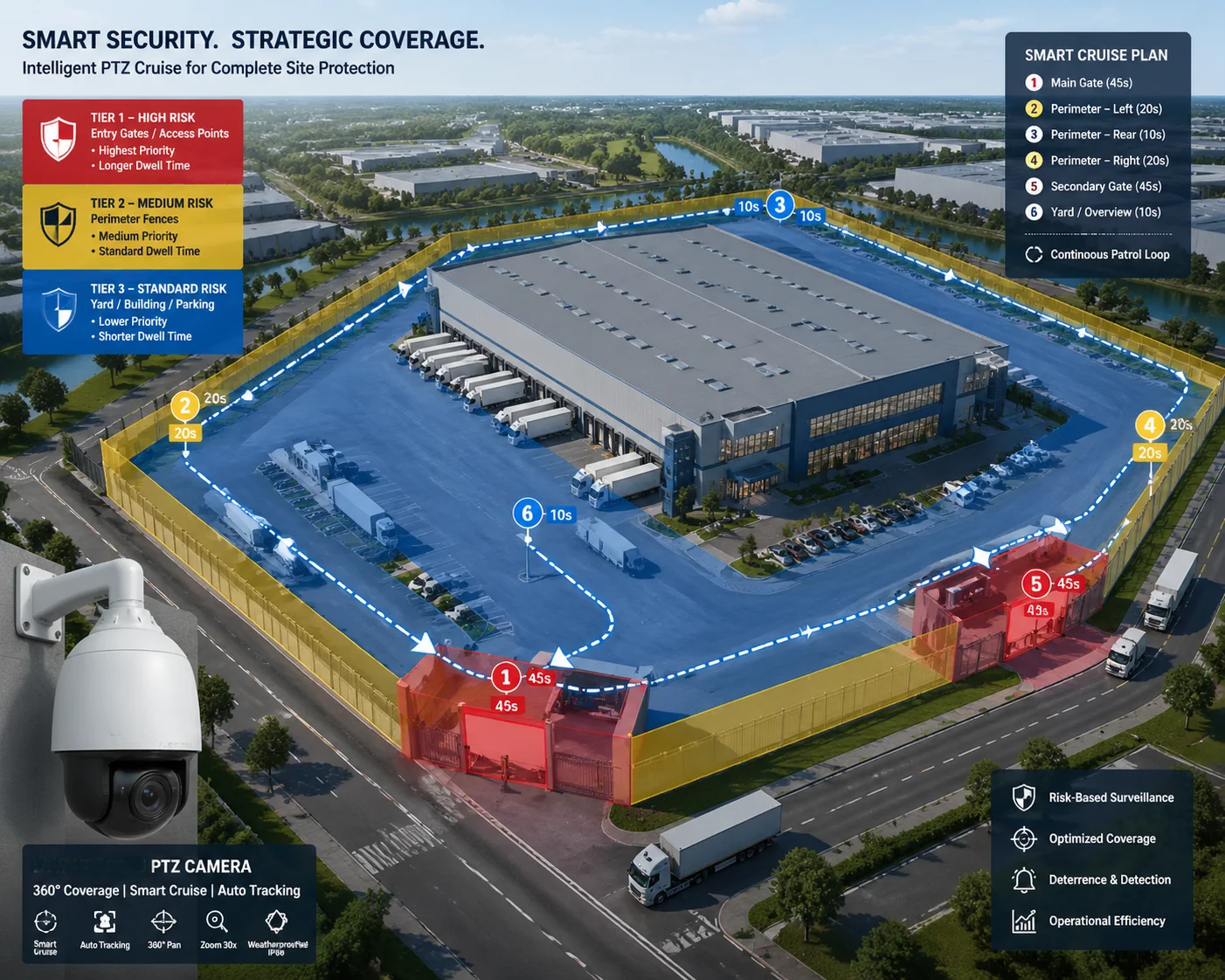
Wie optimiere ich den Fahrplan, um ein Gleichgewicht zwischen Erfassungsbereich und KI-Genauigkeit herzustellen?
Ich sage meinen Kunden immer, dass mehr Voreinstellungen nicht gleichbedeutend mit besserer Sicherheit sind. Manchmal führen weniger Stopps mit längeren Verweilzeiten zu weitaus besseren Ergebnissen in der Praxis.
Um ein Gleichgewicht zwischen Erfassungsbereich und KI-Genauigkeit herzustellen, sollten Sie die Anzahl der Voreinstellungen auf Zonen mit hoher Priorität beschränken, jedem Stopp mindestens 5 Sekunden Verweildauer einräumen und die 5-Sekunden-Regel befolgen: 1 Sekunde für die Stabilisierung, 3 Sekunden für die KI-Erfassung und 1 Sekunde als Puffer gegen Netzwerk- oder Verarbeitungsverzögerungen.
 Optimierung des Kreuzfahrtplans - ausgewogene Abdeckung der AI-Genauigkeit
Optimierung des Kreuzfahrtplans - ausgewogene Abdeckung der AI-Genauigkeit
Die 5-Sekunden-Regel
Ich verwende einen einfachen Rahmen für jeden von mir konfigurierten Kreuzfahrtweg. Ich nenne es die 5-Sekunden-Regel. Sie unterteilt jede Verweildauer in drei Phasen:
- Zweite 1: Die Kamera kommt zur Ruhe. Die Motorvibrationen hören auf. PDAF stellt den Fokus ein. Hier findet keine nützliche KI-Arbeit statt.
- Sekunden 2 bis 4: Dies ist das zentrale KI-Erfassungsfenster. Bei 15 FPS erhält die KI 45 saubere Bilder. Das reicht für die Erkennung von Menschen, Fahrzeugen und sogar für einfache LPR bei guter Beleuchtung.
- Zweite 5: Dies ist die Pufferzone. Hier werden die Netzwerklatenz zwischen der Kamera und dem NVR, eventuelle Wiederholungszyklen des Algorithmus und kleinere Verzögerungen bei der Kodierung verarbeitet.
Diese Regel ist nicht für jedes Szenario perfekt. Für Gesichtserkennung oder Verhaltensanalyse verlängere ich die Verweilzeit auf 7 oder sogar 10 Sekunden. Aber für die standardmäßige Perimetersicherheit mit Personen- und Fahrzeugerkennung sind 5 Sekunden pro Voreinstellung ein solider Grundwert.
Priorisierung der Voreinstellungen nach Risikostufe
Nicht jeder Bereich in einer Einrichtung benötigt die gleiche Aufmerksamkeit. Ein Haupteingangstor braucht mehr Verweilzeit als eine ruhige Seitenwand. Ich empfehle, alle voreingestellten Positionen in drei Prioritätsstufen zu sortieren:
- Stufe 1 (hohes Risiko): Eingangspunkte, Parkplätze, Laderampen. Hier beträgt die Verweildauer 7 bis 10 Sekunden.
- Stufe 2 (mittleres Risiko): Zaunlinien, sekundäre Korridore, Lagerbereiche. Diese erhalten 5 Sekunden.
- Stufe 3 (geringes Risiko): Offene Felder ohne Anlagen, dekorative Bereiche. Diese erhalten 3 Sekunden oder werden ganz von der Fahrstrecke entfernt.
Indem man die Gesamtzahl der Voreinstellungen reduziert und den wichtigen Voreinstellungen mehr Zeit einräumt, wird der Fahrzyklus schneller abgeschlossen und die KI verfügt an jedem kritischen Punkt über genügend Daten. Ich habe gesehen, dass dieser Ansatz die Gesamterkennungsraten um 20% bis 30% an Standorten erhöht hat, die zuvor 15 oder mehr Voreinstellungen mit einer Verweildauer von 2 Sekunden für alle verwendet haben.
Halten Sie die Verweilzeit zwischen den Zyklen konstant
Eine Sache, die ich immer überprüfe, ist, ob die Verweilzeit von einem Zyklus zum nächsten gleich bleibt. Einige billigere PTZ-Steuerungen haben eine Zeitabweichung. Es kann sein, dass sie eine Voreinstellung im ersten Zyklus 5 Sekunden lang halten und im nächsten Zyklus 3,2 Sekunden. Diese Inkonsistenz beeinträchtigt KI-Analysen, die auf zeitbasierten Regeln beruhen, wie z. B. die Erkennung von Herumlungern oder die Messung von Warteschlangenzeiten.
Wenn Ihr PTZ-System eine Zeitdrift aufweist, empfehle ich Ihnen, zu einem Controller oder NVR zu wechseln, der eine präzise ONVIF-basierte Zeitplanung verwendet. Oder Sie können unsere Loyalty-Secu-PTZ-Kameras verwenden, die über eine eingebaute Cruise-Engine mit Verweilzeitkonsistenz im Millisekundenbereich verfügen. Damit sind Sie nicht mehr von einem externen Controller abhängig und können sicherstellen, dass jeder Zyklus identisch ist.
Auch die voreingestellte Rückgabegenauigkeit ist wichtig
Selbst wenn die Verweildauer perfekt ist, wird die KI versagen, wenn die Kamera nicht jedes Mal zum gleichen exakten Winkel zurückkehrt. Wenn die Voreinstellung 5 beim ersten Zyklus auf 45,0° und beim nächsten Zyklus auf 45,3° zeigt, verschiebt sich der virtuelle Erfassungsbereich, den Sie im VMS gezeichnet haben, im Bild. Objekte, die sich innerhalb des Bereichs befinden sollten, fallen aus diesem heraus. Die AI-Regel wird nicht ausgelöst.
PTZ-Kameras der Spitzenklasse bieten eine voreingestellte Rücklaufgenauigkeit von ±0,1° oder besser. Dadurch bleibt der Bildausschnitt über Hunderte von Zyklen hinweg identisch. Unsere Kameras bei Loyalty-Secu sind nach diesem Standard gebaut. Die Kombination aus stabiler Verweildauer und präziser Voreinstellung gibt der KI die Konsistenz, die sie braucht, um Tag für Tag zuverlässig zu arbeiten.
Schlussfolgerung
Die Genauigkeit der Verweilzeit ist nicht nur eine PTZ-Einstellung. Sie ist die Grundlage dafür, ob Ihre KI-Erkennungen zuverlässig oder nutzlos sind. Stimmt das Timing, funktioniert die KI. Wenn sie falsch eingestellt ist, zahlen Sie für ein intelligentes System, das sich blind verhält.
1. YOLO Echtzeit-Objekterkennung Multibildverarbeitung. ︎ 2. Einschwingzeit des Phasenerkennungs-Autofokus für PTZ-Kameras. ︎ 3. ONVIF Profil S Abfrage des voreingestellten Positionsstatus. ︎ 4. Multi-Frame-Voting zur Reduktion von False Positives in der KI. ︎ 5. Motorstabilisierung Vibrationsdämpfungszeit für PTZ-Köpfe. ︎ 6. Gesichtserkennung minimale Verweilzeit für die Merkmalsextraktion. ︎ 7. Bestätigungsrahmen für Kennzeichenerkennungszeichen. ︎ 8. Berechnungsgenauigkeit des Zeitfensters für die Erkennung von Herumlungern. ︎ 9. ONVIF-Metadaten für PTZ-Position und Fokusstatus. ︎ 10. Voreingestellte Rückgabegenauigkeitstoleranz für virtuelle Erfassungsbereiche. ︎