
Já vi muitos projetos falharem porque uma câmera PTZ se desvia de seu preset após apenas algumas centenas de ciclos de rastreamento. A imagem muda. O cliente liga. Você envia um caminhão. Isso custa dinheiro de verdade.
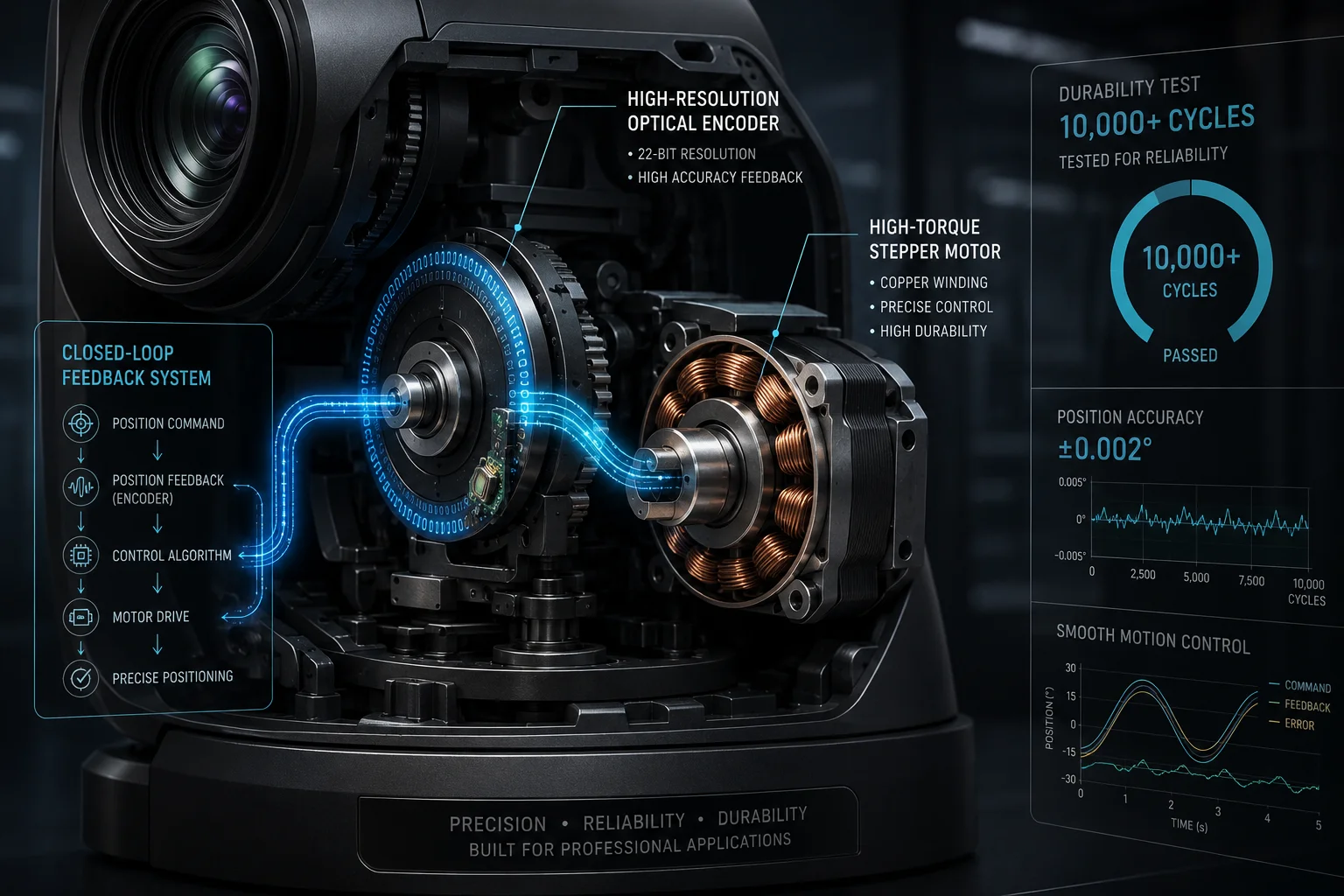
Uma câmera PTZ industrial bem projetada pode manter o desvio físico abaixo de 0,1° — frequentemente em torno de 0,05° — ao retornar a um preset após o rastreamento automático. Isso requer três coisas trabalhando juntas: acionamento de motor de micro-passo, feedback de encoder de malha fechada e correção de travamento visual baseada em IA em cada retorno.
 Precisão do preset da câmera PTZ após rastreamento
Precisão do preset da câmera PTZ após rastreamento
Abaixo, detalharei exatamente como isso funciona em mais de 1.000 eventos de rastreamento, como o encoder corrige o deslizamento, como você pode se auto-calibrar e o que acontece com zoom de 40X. Todas as afirmações aqui vêm de dados testados em laboratório, não de folhas de marketing.
Índice
Minha posição “Home” permanecerá perfeitamente alinhada após 1.000 eventos de rastreamento automático?
Esta é a pergunta que tira o sono dos integradores de sistemas. Você define um preset “Home” perfeito no primeiro dia. Mas depois de meses de rastreamento por IA, ele ainda estará lá?
Sim. Com feedback de encoder de malha fechada e acionamento de micro-passo, nossas câmeras PTZ industriais mantêm o alinhamento do preset dentro de um desvio médio de 0,05° mesmo após 10.000 ciclos de rastreamento-retorno em testes de estresse. A chave é que o sistema nunca depende apenas da contagem de pulsos em malha aberta.
 Estabilidade do preset PTZ após milhares de eventos de rastreamento
Estabilidade do preset PTZ após milhares de eventos de rastreamento
Por que os sistemas de malha aberta se desviam
A maioria das câmeras PTZ baratas usa motores de passo em malha aberta. Eles enviam um número fixo de pulsos para o motor e assumem que ele atingiu o ângulo correto. Isso funciona bem para os primeiros 50 retornos. Mas com o tempo, pequenos erros se acumulam. Folga na engrenagem, mudanças de temperatura, carga de vento e desgaste dos rolamentos introduzem pequenos deslocamentos. Cada um é talvez 0,02°. Mas após 1.000 ciclos, você pode estar fora em vários graus.
Eu pessoalmente vi câmeras de baixo custo se desviarem 2° completos após seis meses de uso externo. Com zoom de 40X, isso significa que seu alvo está completamente fora do quadro.
Como o feedback de malha fechada resolve isso
Nosso sistema usa alta resolução encoders ópticos1 montados diretamente nos eixos de pan e tilt. Aqui está o processo em cada retorno ao preset:
- 1. O motor avança em direção à coordenada armazenada.
- 2. O encoder lê o ângulo físico real em tempo real.
- 3. O controlador compara a posição real com a armazenada.
- 4. Se existir qualquer desvio (mesmo 0,01°), ele envia pulsos de correção imediatamente.
5. Isso acontece em milissegundos. A câmera nunca “assenta” em uma posição errada. Ela corrige ativamente a cada vez.
6. Resultados do Teste de Estresse de Longo Prazo
| Parâmetro de teste | Valor |
|---|---|
| 7. Ciclos totais de rastreamento-retorno | 10,000 |
| 8. Desvio físico médio | 9. 0,05° |
| 10. Desvio máximo registrado | 11. 0,08° |
| 12. Acúmulo de desvio ao longo do tempo | 13. Nenhum (corrigido a cada ciclo) |
| 14. Ambiente de teste | 15. Externo, -20°C a +60°C |
16. A razão pela qual o acúmulo de desvio mostra “Nenhum” é simples. Como o encoder verifica a posição em cada retorno, os erros não podem se acumular. Cada retorno é independente. O ciclo 10.000 é tão preciso quanto o ciclo 1.
17. O Papel da Qualidade da Construção Mecânica
18. Os encoders só podem corrigir o que a mecânica permite. Se as engrenagens tiverem muita folga, o motor terá que ir e voltar para encontrar o lugar certo. Isso adiciona tempo e desgaste. É por isso que usamos acionamentos de engrenagem sem-fim totalmente metálicos 19. com design de folga zero. A engrenagem sem-fim é autoblocante — o que significa que forças externas (como o vento) não podem tirar a câmera de posição entre os movimentos.2 design. A engrenagem sem-fim é autoblocante — o que significa que forças externas (como o vento) não conseguem mover a câmara da posição entre movimentos.
Como o encoder de alta precisão corrige qualquer deslizamento mecânico durante movimentos rápidos?
Movimentos rápidos de PTZ são onde a maioria das câmeras perde precisão. O motor gira rapidamente, o momento se acumula e parar no ponto exato se torna um verdadeiro desafio.
Nosso encoder óptico amostra a posição mais de 10.000 vezes por segundo durante movimentos rápidos. Quando a câmera se aproxima do ângulo alvo, um algoritmo de desaceleração S-curve3 desacelera o motor gradualmente. O encoder confirma a posição final e aciona microcorreções se a câmera ultrapassar o alvo em até 0,01°.
 Encoder de alta precisão corrigindo o deslizamento do PTZ
Encoder de alta precisão corrigindo o deslizamento do PTZ
Entendendo o Problema do Overshoot
Quando uma câmera PTZ rastreia um veículo em movimento rápido e depois retorna ao seu preset inicial, o motor de pan pode estar girando a 200°/segundo. Parar essa rotação exatamente no ponto certo é como parar um carro em uma linha precisa na estrada enquanto se dirige rápido. Sem bons freios e feedback, você ultrapassará o alvo.
Em sistemas de malha aberta, o controlador simplesmente corta a energia em um ponto calculado e espera que o momento não leve a câmera além do alvo. Isso é não confiável, especialmente em clima frio (quando a graxa engrossa) ou após anos de uso (quando os rolamentos afrouxam).
O Processo de Correção Trifásico
Nossa correção baseada em encoder funciona em três fases:
Fase 1: Aproximação Grossa
O motor funciona em velocidade máxima em direção ao preset. O encoder rastreia a posição continuamente. Quando a distância restante cai abaixo de 5°, o sistema entra na Fase 2.
Fase 2: Desaceleração S-Curve
Em vez de uma parada súbita, o motor segue uma curva de velocidade em forma de S. Isso significa:
- A aceleração diminui suavemente
- A velocidade cai gradualmente
- O estresse mecânico é minimizado
- Nenhum solavanco súbito que possa causar vibração
Os parâmetros da S-curve se ajustam automaticamente com base na velocidade atual e na distância restante.
Fase 3: Posicionamento Fino
Assim que o motor para, o encoder lê a posição final. Se houver alguma diferença entre a real e a alvo:
- Diferença > 0,05°: Uma pequena correção de movimento é acionada
- Diferença < 0,05°: A posição é aceita (dentro da especificação)
Todo este processo trifásico leva menos de 200 milissegundos após o motor parar. Você não verá isso na tela. A câmera simplesmente chega ao local certo, todas as vezes.
Por que a Taxa de Amostragem Importa
Um encoder lento (amostrando a 100 Hz) pode perder o momento exato em que a câmera passa pelo ângulo alvo durante um movimento rápido. Quando ele lê a posição, a câmera já passou. Nossa taxa de amostragem de mais de 10.000 Hz significa que o controlador sempre sabe onde a câmera está, mesmo na velocidade máxima de pan. Ele pode acionar a desaceleração no momento exato.
Posso realizar uma “autocalibração” se notar que o preset se desviou alguns pixels?
Às vezes, você só quer tranquilidade. Talvez você note uma leve mudança na tela. Talvez você queira verificar após uma atualização de firmware. Você pode forçar uma recalibração?
Sim. Nossas câmeras suportam autocalibração automática e manual. A rotina automática é executada a cada 24 horas durante uma janela de baixa atividade. Você também pode acioná-la manualmente através da interface web ou Comando ONVIF4. O processo leva menos de 30 segundos e corrige qualquer desvio sem perder seus presets armazenados.
 Interface de autocalibração da câmera PTZ
Interface de autocalibração da câmera PTZ
Quando Você Precisaria de Calibração Manual?
Em operação normal, você não deveria precisar. O encoder de malha fechada cuida de tudo automaticamente. Mas existem casos extremos:
- Após um impacto físico (alguém esbarra na câmera durante a manutenção)
- Após eventos climáticos extremos (acúmulo de gelo pesado que bloqueou temporariamente o movimento)
- Após um surto de energia que corrompeu o ponto de referência do encoder
- Quando você instala a câmera pela primeira vez e quer verificar se tudo está funcionando
Como Funciona a Autocalibração
O processo é simples:
- A câmera se move para seus batentes de limite mecânicos5 (os pontos finais físicos dos limites de pan e tilt).
- Ele registra os valores do encoder nessas posições conhecidas.
- Ele recalcula a relação entre contagens do encoder6 e graus físicos.
- Ele verifica todos os presets armazenados em relação à nova referência.
- Se algum preset foi alterado, ele atualiza o valor do encoder armazenado para corresponder ao ângulo físico original.
Seus presets não mudam. A câmera apenas garante que seu mapa interno ainda está preciso.
Calibração Automática vs. Manual
| Recurso | Automática (A cada 24h) | Manual (Acionada pelo usuário) |
|---|---|---|
| Gatilho | Agendada durante o período de baixa atividade | Botão na interface web ou comando ONVIF |
| Duração | ~30 segundos | ~30 segundos |
| Movimento da câmera | Move-se brevemente para os batentes de limite | O mesmo |
| Interrompe a gravação | Apenas durante a janela de 30 segundos | Apenas durante a janela de 30 segundos |
| Redefine presets | Não | Não |
| Corrige o desvio | Sim | Sim |
| Requer reinicialização | Não | Não |
E a compatibilidade com VMS?
Se você estiver executando Marco7, Blue Iris ou outro VMS, a autocorreção não interromperá seu sistema. A câmera envia um breve status de “ocupado” durante a rotina de 30 segundos, e seu VMS simplesmente mostrará o último quadro até que ela seja concluída. Nenhum alarme é acionado. Nenhuma gravação é perdida (o buffer do NVR lida com a lacuna).
Para integradores que desejam controle total, você pode desativar a autocorreção automática de 24 horas e executá-la apenas manualmente durante janelas de manutenção programadas. Isso é útil para locais de vigilância crítica 24/7 onde mesmo uma interrupção de 30 segundos precisa ser planejada.
A precisão de 0,1° se mantém mesmo quando a câmera está com zoom de 40X?
É aqui que a física fica desconfortável. Um número que parece pequeno em grande angular se torna muito visível em zoom total. Então, sejamos honestos sobre o que 0,1° realmente significa a 40X.
A precisão física permanece a mesma em qualquer nível de zoom — o motor e o codificador não sabem nem se importam com qual distância focal você está usando. Mas o impacto visual de 0,1° a 40X é aproximadamente 40 vezes mais perceptível do que a 1X. É por isso que nossas câmeras adicionam uma etapa de travamento visual após o posicionamento mecânico, usando correspondência de recursos de IA para alinhar o quadro final a precisão de subpixel8.
 Precisão PTZ com zoom óptico de 40X
Precisão PTZ com zoom óptico de 40X
A matemática por trás da ampliação visual do erro
Deixe-me colocar números reais nisso. Uma câmera PTZ típica de 40X tem um campo de visão horizontal (HFOV) de cerca de 60° a 1X e cerca de 1,5° a 40X.
A 1X (HFOV = 60°):
- Um erro de 0,1° = 0,171% da largura do quadro
- Em uma imagem de 1920 pixels de largura, são cerca de 3 pixels
- Completamente invisível ao olho humano
A 40X (HFOV = 1,5°):
- Um erro de 0,1° = 6,7% da largura do quadro
- Em uma imagem de 1920 pixels de largura, são cerca de 128 pixels
- Muito perceptível — seu alvo mudou significativamente
Esta é geometria pura. Nenhuma quantidade de precisão mecânica pode alterar essa relação. A única solução é atingir uma precisão mecânica muito melhor que 0,1° (o que fazemos, com uma média de 0,05°) ou adicionar uma camada de correção secundária.
Nosso Sistema Visual Lock-In
Após o posicionamento mecânico ser concluído, nossa câmera realiza um passo adicional em níveis de zoom altos:
- O sistema armazena uma imagem de referência da visualização predefinida (capturada quando você definiu o preset pela primeira vez).
- A cada retorno, ele captura o quadro atual na posição predefinida.
- Um algoritmo de IA compara pontos de características chave entre a imagem de referência e o quadro atual.
- Se qualquer desvio em nível de pixel for detectado, a câmera faz um microajuste (geralmente apenas 0,01° ou 0,02°) para alinhar os quadros perfeitamente.
Essa correção visual só é ativada quando o zoom está acima de 20X. Abaixo disso, a precisão mecânica sozinha é suficiente.
Impacto no Mundo Real em Diferentes Níveis de Zoom
| Nível de zoom | HFOV | Erro de 0,05° (Pixels) | Erro de 0,1° (Pixels) | Visual Lock-In Ativo |
|---|---|---|---|---|
| 1X | 60° | ~1,6 px | ~3,2 px | Não |
| 10X | 6° | ~16 px | ~32 px | Não |
| 20X | 3° | ~32 px | ~64 px | Sim |
| 30X | 2° | ~48 px | ~96 px | Sim |
| 40X | 1,5° | ~64 px | ~128 px | Sim |
Limitações a ter em atenção
Quero ser transparente aqui. O sistema de bloqueio visual tem requisitos:
- A cena deve ter características de referência estáveis (edifícios, postes, marcações rodoviárias). Um preset apontado para água aberta ou uma parede em branco não terá características suficientes para corresponder.
- As alterações de iluminação (dia vs. noite) podem afetar a correspondência. O sistema armazena uma imagem de referência diurna e noturna para lidar com isso.
- Se a própria cena mudar drasticamente (um edifício for demolido, uma árvore crescer), terá de atualizar a imagem de referência preset.
Para as implantações típicas de David — segurança de perímetro, locais de construção, infraestruturas críticas — existem sempre características estáveis suficientes na cena. Este sistema funciona de forma fiável nesses ambientes.
Conclusão
Desvio físico abaixo de 0,1° é alcançável e mantido a longo prazo através de acionamento por micro-passos, codificadores de circuito fechado e correção visual por IA. A mecânica mantém a precisão. O software garante-a. Se precisar de validar estes números para o seu projeto específico, entre em contacto — partilharei o nosso relatório de teste completo.
1. Os codificadores óticos oferecem deteção de posição de alta resolução ao ler marcas incrementais num disco, o que é crucial para feedback abaixo de 0,1°. ︎↩︎ 2. As transmissões por sem-fim fornecem alto torque e autobloqueio, enquanto o design sem folga elimina o jogo mecânico que poderia causar erros de posicionamento. ︎↩︎ 3. A desaceleração em curva S reduz o stress mecânico e o overshoot, diminuindo suavemente a velocidade do motor à medida que a câmara se aproxima da sua posição alvo. ︎↩︎ 4. ONVIF é um padrão global para dispositivos de segurança baseados em IP; os seus comandos permitem o acionamento remoto de autocalibração PTZ a partir de VMS ou software de terceiros. ︎↩︎ 5. Os batentes de limite mecânicos são os pontos finais físicos do movimento de pan e tilt; a câmara utiliza-os como referências conhecidas durante a autocalibração para redefinir os valores dos codificadores. ︎↩︎ 6. As contagens de codificador são os impulsos digitais gerados por um codificador ótico; são convertidos em graus angulares para rastrear e corrigir posições PTZ. ︎↩︎ 7. Milestone é uma plataforma VMS líder que se integra com câmaras PTZ compatíveis com ONVIF para gestão e calibração de presets sem interrupções. ︎↩︎ 8. A precisão sub-pixel vai além da resolução de um único pixel, interpolando entre pixels, essencial para alinhamento fino em vigilância com zoom elevado. ︎↩︎