
لقد رأيت العديد من المشاريع تفشل لأن كاميرا PTZ تنحرف عن إعدادها المسبق بعد بضع مئات من دورات التتبع فقط. تتغير الصورة. يتصل العميل. ترسل شاحنة. هذا يكلف مالاً حقيقياً.
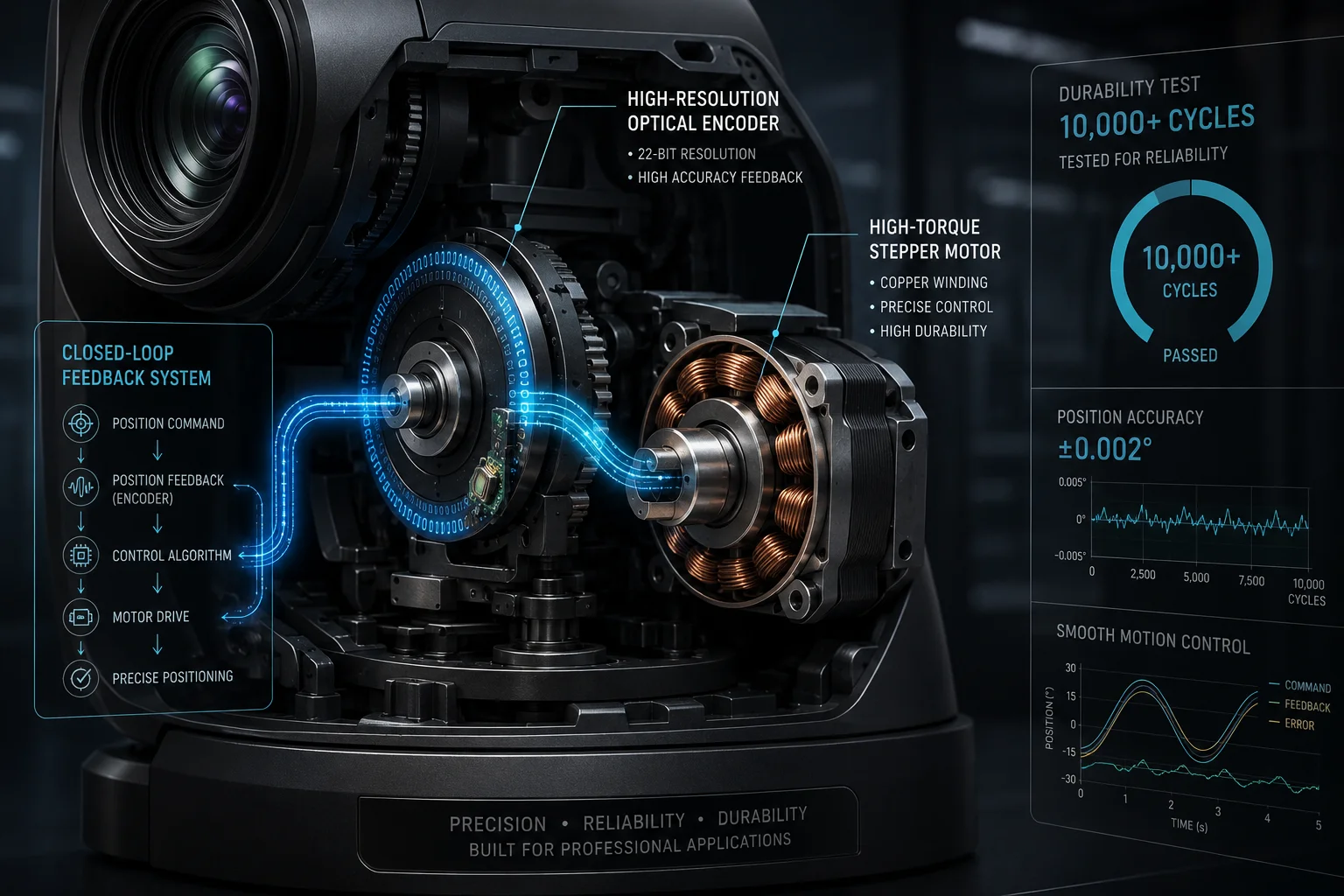
يمكن لكاميرا PTZ الصناعية المصممة جيدًا الحفاظ على الانحراف المادي أقل من 0.1 درجة - غالبًا حوالي 0.05 درجة - عند العودة إلى إعداد مسبق بعد التتبع التلقائي. يتطلب هذا ثلاثة أشياء تعمل معًا: محرك خطوة دقيقة، وردود فعل مشفر حلقة مغلقة، وتصحيح قفل بصري قائم على الذكاء الاصطناعي عند كل عودة.
 دقة الإعداد المسبق لكاميرا PTZ بعد التتبع
دقة الإعداد المسبق لكاميرا PTZ بعد التتبع
أدناه، سأوضح بالتفصيل كيف يعمل هذا عبر أكثر من 1000 حدث تتبع، وكيف يقوم المشفر بتصحيح الانزلاق، وكيف يمكنك المعايرة الذاتية، وما يحدث عند تكبير 40X. كل ادعاء هنا يأتي من بيانات مختبرة في المختبر، وليس من أوراق التسويق.
جدول المحتويات
هل سيبقى وضعي “الرئيسي” محاذيًا تمامًا بعد 1000 حدث تتبع تلقائي؟
هذا هو السؤال الذي يبقي مدمجي الأنظمة مستيقظين ليلاً. تقوم بتعيين إعداد مسبق “رئيسي” مثالي في اليوم الأول. ولكن بعد أشهر من تتبع الذكاء الاصطناعي، هل سيظل موجودًا؟
نعم. مع ردود فعل مشفر حلقة مغلقة ومحرك خطوة دقيقة، تحافظ كاميرات PTZ الصناعية لدينا على محاذاة الإعداد المسبق ضمن انحراف متوسط قدره 0.05 درجة حتى بعد 10000 دورة تتبع-عودة في اختبارات الإجهاد. المفتاح هو أن النظام لا يعتمد أبدًا على عد النبضات الحلقية المفتوحة وحدها.
 استقرار الإعداد المسبق لكاميرا PTZ بعد آلاف أحداث التتبع
استقرار الإعداد المسبق لكاميرا PTZ بعد آلاف أحداث التتبع
لماذا تنحرف الأنظمة الحلقية المفتوحة
تستخدم معظم كاميرات PTZ الرخيصة محركات خطوة حلقية مفتوحة. ترسل عددًا ثابتًا من النبضات إلى المحرك وتفترض أنها وصلت إلى الزاوية الصحيحة. هذا يعمل بشكل جيد لأول 50 عودة. ولكن بمرور الوقت، تتراكم الأخطاء الصغيرة. تسبب تفاوت التروس، وتغيرات درجة الحرارة، وحمل الرياح، وتآكل المحامل انحرافات طفيفة. كل منها ربما 0.02 درجة. ولكن بعد 1000 دورة، قد تكون بعيدًا ببضع درجات.
لقد رأيت شخصيًا كاميرات بميزانية محدودة تنحرف بمقدار درجة كاملة بعد ستة أشهر من الاستخدام الخارجي. عند تكبير 40X، هذا يعني أن هدفك خارج الإطار تمامًا.
كيف يحل رد الفعل الحلقي المغلق هذه المشكلة
يستخدم نظامنا عالي الدقة مشفرات بصرية1 مثبتة مباشرة على محاور الدوران والإمالة. إليك العملية في كل عودة إلى الإعداد المسبق:
- المحرك يتجه نحو الإحداثي المخزن.
- يقرأ المشفر الزاوية الفيزيائية الفعلية في الوقت الفعلي.
- يقارن المتحكم الموضع الفعلي بالموضع المخزن.
- إذا كان هناك أي فجوة (حتى 0.01 درجة)، فإنه يرسل نبضات تصحيح على الفور.
يحدث هذا في أجزاء من الثانية. الكاميرا لا “تستقر” أبدًا في موضع خاطئ. إنها تصحح بنشاط في كل مرة.
نتائج اختبار الإجهاد طويل الأمد
| معلمة الاختبار | القيمة |
|---|---|
| إجمالي دورات التتبع والعودة | 10,000 |
| متوسط الانحراف الفيزيائي | 0.05 درجة |
| أقصى انحراف مسجل | 0.08 درجة |
| تراكم الانجراف بمرور الوقت | لا يوجد (تم تصحيحه في كل دورة) |
| بيئة الاختبار | خارجي، من -20 درجة مئوية إلى +60 درجة مئوية |
سبب ظهور “لا يوجد” لتراكم الانجراف بسيط. نظرًا لأن المشفر يتحقق من الموضع في كل عودة، لا يمكن للأخطاء أن تتراكم. كل عودة مستقلة. الدورة 10,000 دقيقة دقيقة مثل الدورة 1.
دور جودة البناء الميكانيكي
يمكن للمشفرات تصحيح ما تسمح به الآليات فقط. إذا كان هناك الكثير من اللعب في التروس، فيجب على المحرك البحث ذهابًا وإيابًا للعثور على المكان الصحيح. هذا يضيف وقتًا وتآكلًا. لهذا السبب نستخدم محركات تروس دودة معدنية بالكامل بتصميم خالٍ من الارتداد.2 ترس الدودة ذاتي القفل - مما يعني أن القوى الخارجية (مثل الرياح) لا يمكنها دفع الكاميرا بعيدًا عن موضعها بين الحركات.
كيف يقوم المشفر عالي الدقة بتصحيح أي انزلاق ميكانيكي أثناء الحركات السريعة؟
الحركات السريعة للكاميرا PTZ هي المكان الذي تفقد فيه معظم الكاميرات الدقة. المحرك يدور بسرعة، تتراكم القوة الدافعة، ويصبح التوقف عند النقطة الصحيحة بالضبط تحديًا حقيقيًا.
يقوم المشفر البصري الخاص بنا بأخذ عينات من الموضع بأكثر من 10000 مرة في الثانية أثناء الحركات السريعة. عندما تقترب الكاميرا من زاوية الهدف، فإن خوارزمية تباطؤ منحنى S3 تبطئ المحرك تدريجيًا. يؤكد المشفر الموضع النهائي ويشغل تصحيحات دقيقة إذا تجاوزت الكاميرا الهدف بمقدار 0.01 درجة.
 مشفر عالي الدقة يصحح انزلاق PTZ
مشفر عالي الدقة يصحح انزلاق PTZ
فهم مشكلة تجاوز الهدف
عندما تتعقب كاميرا PTZ مركبة متحركة بسرعة ثم تعود إلى وضعها المسبق، قد يدور محرك الدوران بسرعة 200 درجة في الثانية. إيقاف هذا الدوران عند النقطة الصحيحة بالضبط يشبه إيقاف سيارة عند خط دقيق على الطريق أثناء القيادة بسرعة. بدون مكابح جيدة وردود فعل، ستتجاوز الهدف.
في الأنظمة مفتوحة الحلقة، يقوم المتحكم ببساطة بقطع الطاقة عند نقطة محسوبة ويأمل ألا تحمل القوة الدافعة الكاميرا إلى ما بعد الهدف. هذا غير موثوق به، خاصة في الطقس البارد (عندما تتكاثف الشحوم) أو بعد سنوات من الاستخدام (عندما ترتخي المحامل).
عملية التصحيح ثلاثية المراحل
يعمل التصحيح المعتمد على المشفر الخاص بنا في ثلاث مراحل:
المرحلة 1: الاقتراب التقريبي
يعمل المحرك بأقصى سرعة نحو الوضع المسبق. يتتبع المشفر الموضع باستمرار. عندما تنخفض المسافة المتبقية إلى أقل من 5 درجات، يدخل النظام المرحلة 2.
المرحلة 2: تباطؤ منحنى S
بدلاً من التوقف المفاجئ، يتبع المحرك منحنى سرعة على شكل حرف S. هذا يعني:
- يتناقص التسارع بسلاسة
- تنخفض السرعة تدريجيًا
- يتم تقليل الإجهاد الميكانيكي
- لا يوجد اهتزاز مفاجئ قد يسبب اهتزازًا
يتم ضبط معلمات منحنى S تلقائيًا بناءً على السرعة الحالية والمسافة المتبقية.
المرحلة 3: تحديد الموضع الدقيق
بمجرد توقف المحرك، يقرأ المشفر الموضع النهائي. إذا كان هناك أي فجوة بين الموضع الفعلي والمستهدف:
- الفجوة > 0.05 درجة: يتم تشغيل حركة تصحيح صغيرة
- الفجوة < 0.05 درجة: يتم قبول الموضع (ضمن المواصفات)
تستغرق هذه العملية الكاملة المكونة من ثلاث مراحل أقل من 200 مللي ثانية بعد توقف المحرك. لن تراها على الشاشة. تصل الكاميرا ببساطة إلى المكان الصحيح، في كل مرة.
لماذا معدل أخذ العينات مهم
قد يفوت المشفر البطيء (الذي يأخذ عينات بمعدل 100 هرتز) اللحظة الدقيقة التي تمر فيها الكاميرا بزاوية الهدف أثناء حركة سريعة. بحلول الوقت الذي يقرأ فيه الموضع، تكون الكاميرا قد تجاوزت بالفعل. معدل أخذ العينات لدينا الذي يزيد عن 10000 هرتز يعني أن وحدة التحكم تعرف دائمًا مكان الكاميرا، حتى عند أقصى سرعة تحريك. يمكنها تشغيل التباطؤ في اللحظة المناسبة تمامًا.
هل يمكنني إجراء “معايرة ذاتية” إذا لاحظت أن الإعداد المسبق قد انحرف ببضع بكسلات؟
في بعض الأحيان تريد فقط راحة البال. ربما تلاحظ تحولًا طفيفًا على الشاشة. ربما تريد التحقق بعد تحديث البرنامج الثابت. هل يمكنك فرض إعادة معايرة؟
نعم. تدعم كاميراتنا كلاً من المعايرة الذاتية التلقائية واليدوية. يتم تشغيل الروتين التلقائي كل 24 ساعة خلال فترة نشاط منخفض. يمكنك أيضًا تشغيله يدويًا عبر واجهة الويب أو أمر ONVIF4. تستغرق العملية أقل من 30 ثانية وتصحح أي انحراف دون فقدان الإعدادات المسبقة المخزنة لديك.
 واجهة المعايرة الذاتية لكاميرا PTZ
واجهة المعايرة الذاتية لكاميرا PTZ
متى ستحتاج إلى المعايرة اليدوية؟
في التشغيل العادي، لا ينبغي أن تحتاج إليها. يتعامل المشفر ذو الحلقة المغلقة مع كل شيء تلقائيًا. ولكن هناك حالات استثنائية:
- بعد تأثير جسدي (شخص ما يصطدم بالكاميرا أثناء الصيانة)
- بعد أحداث مناخية قاسية (تراكم جليد كثيف أعاق الحركة مؤقتًا)
- بعد زيادة في التيار الكهربائي أدت إلى تلف نقطة المرجع للمشفر
- عند تثبيت الكاميرا لأول مرة وتريد التحقق من أن كل شيء يعمل
كيف تعمل المعايرة الذاتية
العملية بسيطة:
- تتحرك الكاميرا إلى نقاط توقف الحد الميكانيكي5 (النقاط النهائية المادية لمدى الحركة الأفقية والرأسية).
- يسجل قيم المشفر عند هذه المواضع المعروفة.
- يعيد حساب العلاقة بين عدد دورات المشفر6 والدرجات الفيزيائية.
- يتحقق من جميع الإعدادات المسبقة المخزنة مقابل المرجع الجديد.
- إذا تحركت أي إعدادات مسبقة، فإنه يحدث قيمة المشفر المخزنة لمطابقة الزاوية الفيزيائية الأصلية.
لا تتغير الإعدادات المسبقة الخاصة بك. تتأكد الكاميرا فقط من أن خريطتها الداخلية لا تزال دقيقة.
المعايرة التلقائية مقابل اليدوية
| الميزة | تلقائي (كل 24 ساعة) | يدوي (يتم تشغيله بواسطة المستخدم) |
|---|---|---|
| المشغل | مجدول خلال وقت النشاط المنخفض | زر واجهة المستخدم على الويب أو أمر ONVIF |
| المدة | ~30 ثانية | ~30 ثانية |
| حركة الكاميرا | تتحرك إلى نقاط التوقف القصوى لفترة وجيزة | نفس الشيء |
| يقاطع التسجيل | فقط خلال نافذة الـ 30 ثانية | فقط خلال نافذة الـ 30 ثانية |
| يعيد تعيين الإعدادات المسبقة | لا يوجد | لا يوجد |
| تصحيح الانجراف | نعم | نعم |
| يتطلب إعادة التشغيل | لا يوجد | لا يوجد |
ماذا عن التوافق مع أنظمة إدارة الفيديو (VMS)؟
إذا كنت تستخدم علامة فارقة7, أو Blue Iris، أو أي نظام VMS آخر، فلن يؤدي المعايرة الذاتية إلى تعطيل نظامك. ترسل الكاميرا حالة “مشغول” موجزة أثناء الروتين الذي يستغرق 30 ثانية، وسيُظهر نظام VMS الخاص بك الإطار الأخير ببساطة حتى يكتمل. لا يتم تشغيل أي إنذارات. لا يتم فقدان أي تسجيلات (مخزن NVR يتعامل مع الفجوة).
بالنسبة للمُدمجين الذين يريدون تحكمًا كاملاً، يمكنك تعطيل المعايرة التلقائية كل 24 ساعة وتشغيلها يدويًا فقط خلال نوافذ الصيانة المجدولة. هذا مفيد لمواقع المراقبة الحيوية التي تعمل على مدار الساعة طوال أيام الأسبوع حيث يجب التخطيط حتى للانقطاع الذي يستغرق 30 ثانية.
هل تظل دقة 0.1 درجة صحيحة حتى عندما يتم تكبير الكاميرا إلى 40X؟
هذا هو المكان الذي تصبح فيه الفيزياء غير مريحة. الرقم الذي يبدو صغيرًا عند الزاوية الواسعة يصبح مرئيًا جدًا عند التكبير الكامل. لذلك لنكن صريحين بشأن ما يعنيه 0.1 درجة فعليًا عند 40X.
تظل الدقة المادية كما هي عند أي مستوى تكبير - المحرك والمُشفّر لا يعرفان أو يهتمان بطول البؤرة الذي تستخدمه. ولكن التأثير المرئي لـ 0.1 درجة عند 40X يكون ملحوظًا بحوالي 40 مرة أكثر من 1X. لهذا السبب تضيف كاميراتنا خطوة قفل مرئي بعد تحديد الموضع الميكانيكي، باستخدام مطابقة ميزات الذكاء الاصطناعي لمحاذاة الإطار النهائي إلى دقة دون بكسل8.
 دقة PTZ عند تكبير بصري 40X
دقة PTZ عند تكبير بصري 40X
الرياضيات وراء التكبير المرئي للخطأ
دعني أضع أرقامًا حقيقية على هذا. تتمتع كاميرا PTZ نموذجية بدقة 40X بمجال رؤية أفقي (HFOV) يبلغ حوالي 60 درجة عند 1X وحوالي 1.5 درجة عند 40X.
عند 1X (HFOV = 60 درجة):
- خطأ 0.1 درجة = 0.17% من عرض الإطار
- على صورة بعرض 1920 بكسل، هذا حوالي 3 بكسلات
- غير مرئي تمامًا للعين البشرية
عند 40X (HFOV = 1.5 درجة):
- خطأ 0.1 درجة = 6.7% من عرض الإطار
- على صورة بعرض 1920 بكسل، هذا حوالي 128 بكسل
- ملحوظ جدًا - لقد تحول هدفك بشكل كبير
هذه هندسة بحتة. لا يمكن لأي قدر من الدقة الميكانيكية تغيير هذه العلاقة. الحل الوحيد هو إما تحقيق دقة ميكانيكية أفضل بكثير من 0.1 درجة (وهو ما نفعله، بمتوسط 0.05 درجة)، أو إضافة طبقة تصحيح ثانوية.
نظام القفل البصري الخاص بنا
بعد اكتمال تحديد الموضع الميكانيكي، تقوم الكاميرا بخطوة إضافية واحدة عند مستويات تكبير عالية:
- يقوم النظام بتخزين صورة مرجعية للعرض المحدد مسبقًا (تم التقاطها عند تعيين الإعداد المسبق لأول مرة).
- عند كل عودة، يلتقط الإطار الحالي في الموضع المحدد مسبقًا.
- يقوم خوارزمية الذكاء الاصطناعي بمقارنة نقاط الميزات الرئيسية بين الإطار المرجعي والإطار الحالي.
- إذا تم اكتشاف أي إزاحة على مستوى البكسل، تقوم الكاميرا بإجراء تعديل دقيق (غالبًا ما يكون 0.01 درجة أو 0.02 درجة فقط) لمحاذاة الإطارات بشكل مثالي.
ينشط هذا التصحيح البصري فقط عندما يكون التكبير أعلى من 20X. أقل من ذلك، تكون الدقة الميكانيكية وحدها كافية.
التأثير في العالم الحقيقي عند مستويات تكبير مختلفة
| مستوى التكبير/التصغير | HFOV | خطأ 0.05 درجة (بكسل) | خطأ 0.1 درجة (بكسل) | القفل البصري نشط |
|---|---|---|---|---|
| 1X | 60° | ~1.6 بكسل | ~حوالي 3.2 بكسل | لا يوجد |
| 10X | 6 درجات | ~16 بكسل | ~32 بكسل | لا يوجد |
| 20X | 3 درجات | ~32 بكسل | ~حوالي 64 بكسل | نعم |
| 30X | 2 درجة | ~48 بكسل | ~96 بكسل | نعم |
| 40X | 1.5 درجة | ~حوالي 64 بكسل | ~128 بكسل | نعم |
قيود يجب الانتباه إليها
أريد أن أكون شفافًا هنا. نظام القفل المرئي له متطلبات:
- يجب أن يحتوي المشهد على ميزات مرجعية ثابتة (مباني، أعمدة، علامات طريق). الإعداد المسبق الذي يشير إلى المياه المفتوحة أو جدار فارغ لن يحتوي على ميزات كافية للمطابقة.
- يمكن أن تؤثر تغييرات الإضاءة (النهار مقابل الليل) على المطابقة. يقوم النظام بتخزين صورة مرجعية نهارية وصورة مرجعية ليلية للتعامل مع هذا.
- إذا تغير المشهد نفسه بشكل كبير (تم هدم مبنى، نمت شجرة)، فستحتاج إلى تحديث الصورة المرجعية المسبقة.
بالنسبة لنشر ديفيد النموذجي - أمن المحيط، مواقع البناء، البنية التحتية الحيوية - هناك دائمًا الكثير من الميزات الثابتة في المشهد. يعمل هذا النظام بشكل موثوق في تلك البيئات.
الخاتمة
الانحراف المادي أقل من 0.1 درجة قابل للتحقيق ويمكن الحفاظ عليه على المدى الطويل من خلال محرك الخطوات الدقيقة، والمشفرات ذات الحلقة المغلقة، والتصحيح المرئي بالذكاء الاصطناعي. الميكانيكا تحافظ على الدقة. البرنامج يضمن ذلك. إذا كنت بحاجة إلى التحقق من صحة هذه الأرقام لمشروعك المحدد، فتواصل معي - سأشارك تقرير الاختبار الكامل الخاص بنا.
1. توفر المشفرات البصرية استشعارًا عالي الدقة للموضع عن طريق قراءة العلامات التزايدية على قرص، وهو أمر بالغ الأهمية للتغذية الراجعة أقل من 0.1 درجة. ︎↩︎ 2. توفر محركات التروس الدودية عزم دوران عاليًا وقفلًا ذاتيًا، بينما يلغي تصميم عدم وجود أي تفاوت ميكانيكي أي لعب ميكانيكي يمكن أن يسبب أخطاء في تحديد الموضع. ︎↩︎ 3. يقلل تباطؤ المنحنى S من الإجهاد الميكانيكي والتجاوز عن طريق تقليل سرعة المحرك بسلاسة مع اقتراب الكاميرا من موضعها المستهدف. ︎↩︎ 4. ONVIF هو معيار عالمي لأجهزة الأمان المستندة إلى IP؛ تسمح أوامره بالتشغيل عن بُعد للمعايرة الذاتية لـ PTZ من VMS أو برامج الطرف الثالث. ︎↩︎ 5. نقاط التوقف الميكانيكية هي نقاط النهاية المادية لحركة التحريك والإمالة؛ تستخدمها الكاميرا كمرجع معروف أثناء المعايرة الذاتية لإعادة تعيين قيم المشفر. ︎↩︎ 6. عدد العدّادات هو النبضات الرقمية التي يولدها المشفر البصري؛ يتم تحويلها إلى درجات زاوية لتتبع وتصحيح مواضع PTZ. ︎↩︎ 7. Milestone هي منصة VMS رائدة تتكامل مع كاميرات PTZ المتوافقة مع ONVIF لإدارة الإعدادات المسبقة والمعايرة بسلاسة. ︎↩︎ 8. تتجاوز دقة البكسل الفرعي دقة البكسل الواحد عن طريق الاستيفاء بين البكسلات، وهو أمر ضروري للمحاذاة الدقيقة في المراقبة ذات التكبير العالي. ︎↩︎