
Ho visto troppi progetti fallire perché una telecamera PTZ si discosta dal suo preset dopo poche centinaia di cicli di tracciamento. L'immagine si sposta. Il cliente chiama. Invii un furgone. Questo costa denaro reale.
Una telecamera PTZ industriale ben progettata può mantenere una deviazione fisica inferiore a 0,1° — spesso intorno a 0,05° — al ritorno a un preset dopo l'auto-tracciamento. Ciò richiede tre elementi che lavorano insieme: azionamento del motore micro-step, feedback dell'encoder a circuito chiuso e correzione visiva basata sull'IA ad ogni ritorno.
 Precisione del preset della telecamera PTZ dopo il tracciamento
Precisione del preset della telecamera PTZ dopo il tracciamento
Di seguito, spiegherò esattamente come funziona su oltre 1.000 eventi di tracciamento, come l'encoder corregge lo slittamento, come è possibile l'autocalibrazione e cosa succede con lo zoom 40X. Ogni affermazione qui proviene da dati testati in laboratorio, non da schede di marketing.
Indice dei contenuti
La mia posizione “Home” rimarrà perfettamente allineata dopo 1.000 eventi di auto-tracciamento?
Questa è la domanda che tiene svegli gli integratori di sistemi. Imposti un “Home” preset perfetto il primo giorno. Ma dopo mesi di tracciamento AI, sarà ancora lì?
Sì. Con il feedback dell'encoder a circuito chiuso e l'azionamento micro-step, le nostre telecamere PTZ industriali mantengono l'allineamento del preset entro una deviazione media di 0,05° anche dopo 10.000 cicli di tracciamento-ritorno nei test di stress. La chiave è che il sistema non si basa mai solo sul conteggio degli impulsi a circuito aperto.
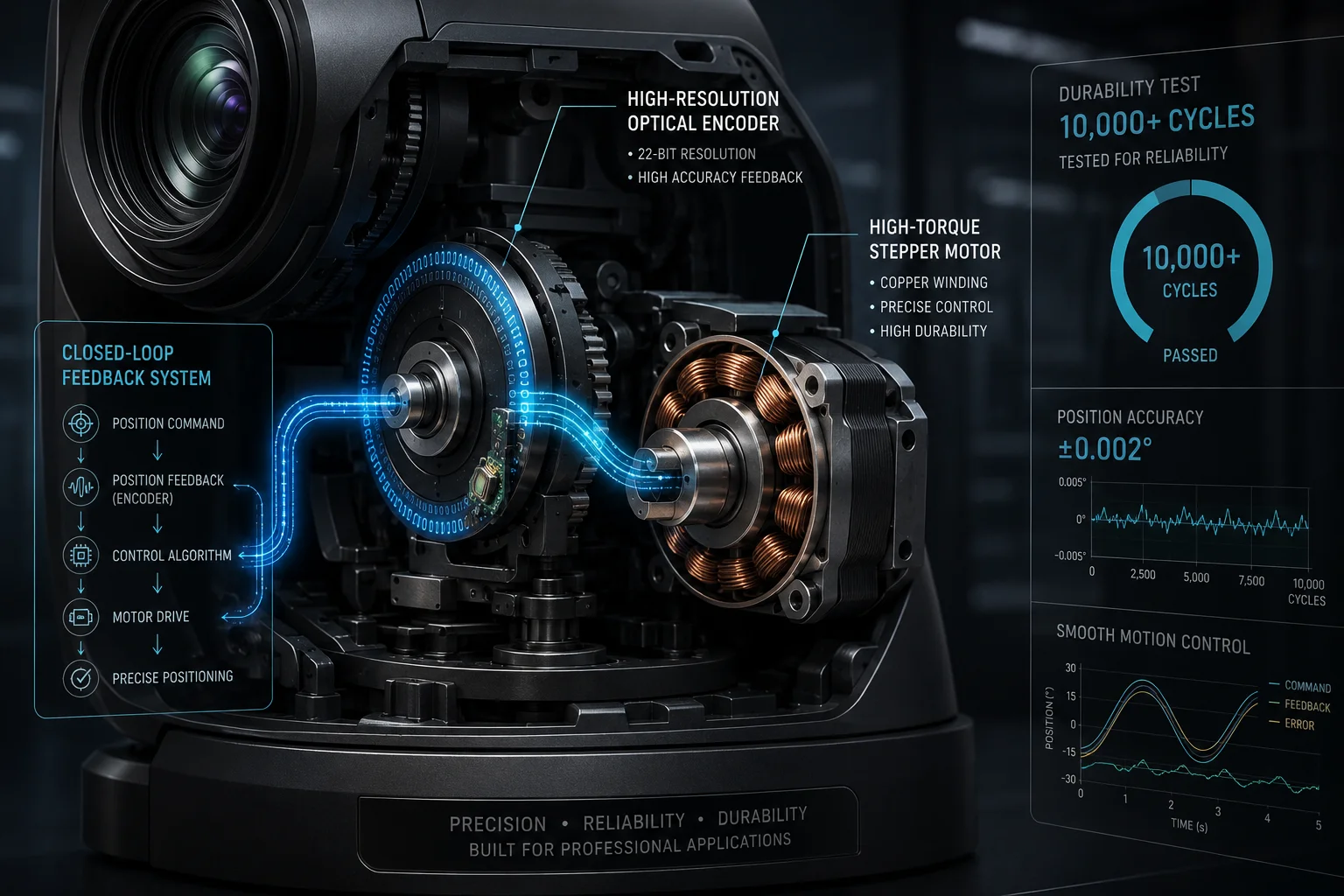 Stabilità del preset PTZ dopo migliaia di eventi di tracciamento
Stabilità del preset PTZ dopo migliaia di eventi di tracciamento
Perché i sistemi a circuito aperto si spostano
La maggior parte delle telecamere PTZ economiche utilizza motori passo-passo a circuito aperto. Inviano un numero fisso di impulsi al motore e presumono che abbia raggiunto l'angolazione corretta. Questo funziona bene per i primi 50 ritorni. Ma nel tempo, piccoli errori si accumulano. Giochi degli ingranaggi, cambiamenti di temperatura, carico del vento e usura dei cuscinetti introducono tutti piccoli scostamenti. Ognuno è forse 0,02°. Ma dopo 1.000 cicli, potresti essere fuori di diversi gradi.
Ho visto personalmente telecamere economiche spostarsi di un intero 2° dopo sei mesi di utilizzo esterno. Con uno zoom 40X, ciò significa che il tuo obiettivo è completamente fuori dall'inquadratura.
Come il feedback a circuito chiuso risolve questo problema
Il nostro sistema utilizza alta risoluzione encoder ottici1 montati direttamente sugli alberi di pan e tilt. Ecco il processo ad ogni singolo ritorno al preset:
- 1. Il motore si muove verso la coordinata memorizzata.
- 2. L'encoder legge l'angolo fisico effettivo in tempo reale.
- 3. Il controller confronta la posizione effettiva con quella memorizzata.
- 4. Se esiste una discrepanza (anche di 0,01°), invia immediatamente impulsi di correzione.
5. Questo avviene in millisecondi. La fotocamera non si “assesta” mai in una posizione errata. Si corregge attivamente ogni singola volta.
6. Risultati del test di stress a lungo termine
| Parametro del test | Valore |
|---|---|
| 7. Cicli totali di tracciamento-ritorno | 10,000 |
| 8. Deviazione fisica media | 9. 0,05° |
| 10. Deviazione massima registrata | 11. 0,08° |
| 13. Nessuno (corretto ogni ciclo) | 14. Ambiente di test |
| 15. Esterno, da -20°C a +60°C | 16. Il motivo per cui l'accumulo di deriva mostra "Nessuno" è semplice. Poiché l'encoder controlla la posizione ad ogni ritorno, gli errori non possono accumularsi. Ogni ritorno è indipendente. Il ciclo 10.000 è accurato quanto il ciclo 1. |
17. Il ruolo della qualità costruttiva meccanica.
18. Gli encoder possono correggere solo ciò che la meccanica consente. Se gli ingranaggi hanno troppo gioco, il motore deve muoversi avanti e indietro per trovare il punto giusto. Questo aggiunge tempo e usura. Ecco perché utilizziamo trasmissioni a vite senza fine interamente in metallo
19. con design a gioco zero 20. La vite senza fine è autobloccante, il che significa che le forze esterne (come il vento) non possono spostare la fotocamera dalla sua posizione tra uno spostamento e l'altro.2 design. L'ingranaggio a vite senza fine è autobloccante, il che significa che forze esterne (come il vento) non possono spostare la telecamera dalla sua posizione tra un movimento e l'altro.
Come corregge l'encoder ad alta precisione eventuali slittamenti meccanici durante movimenti rapidi?
Le rapide movimenti PTZ sono dove la maggior parte delle telecamere perde precisione. Il motore gira velocemente, l'inerzia aumenta e fermarsi nel punto esatto diventa una vera sfida.
Il nostro encoder ottico campiona la posizione oltre 10.000 volte al secondo durante i movimenti rapidi. Quando la telecamera si avvicina all'angolo target, un algoritmo di decelerazione a curva S3 rallenta gradualmente il motore. L'encoder conferma la posizione finale e attiva micro-correzioni se la telecamera supera di 0,01°.
 Encoder ad alta precisione che corregge lo slittamento PTZ
Encoder ad alta precisione che corregge lo slittamento PTZ
Comprendere il problema dell'overshoot
Quando una telecamera PTZ segue un veicolo in rapido movimento e poi torna al suo preset di home, il motore di pan potrebbe girare a 200°/secondo. Fermare quella rotazione nel punto esatto è come fermare un'auto su una linea precisa della strada mentre si guida velocemente. Senza buoni freni e feedback, si supererà il punto.
Nei sistemi ad anello aperto, il controller semplicemente interrompe l'alimentazione in un punto calcolato e spera che l'inerzia non porti la telecamera oltre il target. Questo è inaffidabile, specialmente con il freddo (quando il grasso si addensa) o dopo anni di utilizzo (quando i cuscinetti si allentano).
Il processo di correzione a tre fasi
La nostra correzione basata su encoder funziona in tre fasi:
Fase 1: Avvicinamento grossolano
Il motore gira alla massima velocità verso il preset. L'encoder traccia continuamente la posizione. Quando la distanza rimanente scende sotto i 5°, il sistema entra nella Fase 2.
Fase 2: Decelerazione a curva S
Invece di un arresto improvviso, il motore segue una curva di velocità a forma di S. Ciò significa:
- L'accelerazione diminuisce dolcemente
- La velocità cala gradualmente
- Lo stress meccanico è minimizzato
- Nessuno scossone improvviso che potrebbe causare vibrazioni
I parametri della curva S si regolano automaticamente in base alla velocità attuale e alla distanza rimanente.
Fase 3: Posizionamento fine
Una volta che il motore si ferma, l'encoder legge la posizione finale. Se c'è un divario tra effettivo e target:
- Divario > 0,05°: Viene attivato un piccolo movimento di correzione
- Divario < 0,05°: La posizione viene accettata (entro le specifiche)
L'intero processo trifase richiede meno di 200 millisecondi dopo l'arresto del motore. Non lo vedrai sullo schermo. La telecamera arriva semplicemente nel punto giusto, ogni volta.
Perché la frequenza di campionamento è importante
Un encoder lento (con campionamento a 100 Hz) potrebbe perdere il momento esatto in cui la telecamera attraversa l'angolo target durante un movimento rapido. Al momento della lettura della posizione, la telecamera è già andata oltre. La nostra frequenza di campionamento di oltre 10.000 Hz significa che il controller sa sempre dove si trova la telecamera, anche alla massima velocità di panoramica. Può attivare la decelerazione nel momento giusto.
Posso eseguire una “autocalibrazione” se noto che il preset si è spostato di alcuni pixel?
A volte si desidera semplicemente la tranquillità. Forse si nota un leggero spostamento sullo schermo. Forse si vuole verificare dopo un aggiornamento del firmware. È possibile forzare una ricalibrazione?
Sì. Le nostre telecamere supportano sia l'autocalibrazione automatica che manuale. La routine automatica viene eseguita ogni 24 ore durante una finestra di bassa attività. È anche possibile attivarla manualmente tramite l'interfaccia web o Comando ONVIF4. Il processo richiede meno di 30 secondi e corregge eventuali derive senza perdere i preset memorizzati.
 Interfaccia di autocalibrazione della telecamera PTZ
Interfaccia di autocalibrazione della telecamera PTZ
Quando si dovrebbe usare la calibrazione manuale?
Nell'operatività normale, non dovrebbe essere necessaria. L'encoder a circuito chiuso gestisce tutto automaticamente. Ma ci sono casi limite:
- Dopo un impatto fisico (qualcuno urta la telecamera durante la manutenzione)
- Dopo eventi meteorologici estremi (accumulo di ghiaccio che ha temporaneamente bloccato il movimento)
- Dopo un picco di tensione che ha corrotto il punto di riferimento dell'encoder
- Quando si installa la telecamera per la prima volta e si vuole verificare che tutto funzioni
Come funziona l'autocalibrazione
Il processo è semplice:
- La telecamera si sposta verso i suoi arresti meccanici limite5 (i punti finali fisici del movimento di pan e tilt).
- Registra i valori del codificatore in queste posizioni note.
- Ricalcola la relazione tra conteggi del codificatore6 e gradi fisici.
- Verifica tutti i preset memorizzati rispetto al nuovo riferimento.
- Se un preset si è spostato, aggiorna il valore del codificatore memorizzato per corrispondere all'angolo fisico originale.
I tuoi preset non cambiano. La telecamera si assicura solo che la sua mappa interna sia ancora accurata.
Calibrazione Automatica vs. Manuale
| Caratteristica | Automatica (Ogni 24 ore) | Manuale (Attivata dall'utente) |
|---|---|---|
| Trigger | Pianificata durante i periodi di bassa attività | Pulsante nell'interfaccia utente web o comando ONVIF |
| Durata | ~30 secondi | ~30 secondi |
| Movimento della telecamera | Si sposta brevemente verso i finecorsa | Uguale |
| Interrompe la registrazione | Solo durante la finestra di 30 secondi | Solo durante la finestra di 30 secondi |
| Reimposta i preset | No | No |
| Corregge il drift | Sì | Sì |
| Richiede il riavvio | No | No |
E la compatibilità con VMS?
Se stai eseguendo Pietra miliare7, Blue Iris o un altro VMS, l'autocalibrazione non interromperà il tuo sistema. La telecamera invia un breve stato “occupato” durante la routine di 30 secondi e il tuo VMS mostrerà semplicemente l'ultimo fotogramma fino al suo completamento. Nessun allarme viene attivato. Nessuna registrazione viene persa (il buffer NVR gestisce il gap).
Per gli integratori che desiderano il pieno controllo, è possibile disabilitare la calibrazione automatica 24 ore su 24 e eseguirla solo manualmente durante le finestre di manutenzione programmate. Questo è utile per siti di sorveglianza critici 24/7 dove anche un'interruzione di 30 secondi deve essere pianificata.
La precisione di 0,1° è valida anche quando la telecamera è zoomata a 40X?
È qui che la fisica diventa scomoda. Un numero che sembra piccolo a grandangolo diventa molto visibile a zoom completo. Quindi, siamo onesti su cosa significhi effettivamente 0,1° a 40X.
L'accuratezza fisica rimane la stessa a qualsiasi livello di zoom: il motore e l'encoder non sanno né si preoccupano della lunghezza focale che stai utilizzando. Ma l'impatto visivo di 0,1° a 40X è circa 40 volte più evidente che a 1X. Ecco perché le nostre telecamere aggiungono un passaggio di blocco visivo dopo il posizionamento meccanico, utilizzando il confronto delle caratteristiche AI per allineare il fotogramma finale a precisione sub-pixel8.
 Precisione PTZ con zoom ottico 40X
Precisione PTZ con zoom ottico 40X
La matematica dietro l'ingrandimento visivo dell'errore
Lasciatemi mettere numeri reali su questo. Una tipica telecamera PTZ 40X ha un campo visivo orizzontale (HFOV) di circa 60° a 1X e circa 1,5° a 40X.
A 1X (HFOV = 60°):
- Un errore di 0,1° = 0,17% della larghezza del fotogramma
- Su un'immagine larga 1920 pixel, sono circa 3 pixel
- Completamente invisibile all'occhio umano
A 40X (HFOV = 1,5°):
- Un errore di 0,1° = 6,7% della larghezza del fotogramma
- Su un'immagine larga 1920 pixel, sono circa 128 pixel
- Molto evidente: il tuo bersaglio si è spostato in modo significativo
Questa è pura geometria. Nessuna precisione meccanica può cambiare questa relazione. L'unica soluzione è ottenere una precisione meccanica molto migliore di 0,1° (cosa che facciamo, con una media di 0,05°) o aggiungere un livello di correzione secondario.
Il nostro sistema Visual Lock-In
Dopo che il posizionamento meccanico è completo, la nostra fotocamera esegue un passaggio aggiuntivo a livelli di zoom elevati:
- Il sistema memorizza un'immagine di riferimento della vista preimpostata (acquisita quando hai impostato per la prima volta il preset).
- Ad ogni ritorno, acquisisce il fotogramma corrente nella posizione preimpostata.
- Un algoritmo AI confronta i punti chiave tra l'immagine di riferimento e quella corrente.
- Se viene rilevato un qualsiasi disallineamento a livello di pixel, la fotocamera effettua una micro-regolazione (spesso solo 0,01° o 0,02°) per allineare perfettamente i fotogrammi.
Questa correzione visiva si attiva solo quando lo zoom è superiore a 20X. Al di sotto di tale valore, la sola precisione meccanica è sufficiente.
Impatto nel mondo reale a diversi livelli di zoom
| Livello di zoom | HFOV | Errore di 0,05° (Pixel) | Errore di 0,1° (Pixel) | Visual Lock-In Attivo |
|---|---|---|---|---|
| 1X | 60° | ~1,6 px | ~3,2 px | No |
| 10X | 6° | ~16 px | ~32 px | No |
| 20X | 3° | ~32 px | ~64 px | Sì |
| 30X | 2° | ~48 px | ~96 px | Sì |
| 40X | 1,5° | ~64 px | ~128 px | Sì |
Limitazioni da conoscere
Voglio essere trasparente qui. Il sistema di blocco visivo ha dei requisiti:
- La scena deve avere caratteristiche di riferimento stabili (edifici, pali, segnaletica stradale). Un preset puntato su acqua aperta o un muro vuoto non avrà abbastanza caratteristiche da abbinare.
- Le variazioni di illuminazione (giorno/notte) possono influire sull'abbinamento. Il sistema memorizza un'immagine di riferimento sia diurna che notturna per gestire questo aspetto.
- Se la scena stessa cambia drasticamente (un edificio viene demolito, un albero cresce), dovrai aggiornare l'immagine di riferimento del preset.
Per le tipiche implementazioni di David — sicurezza perimetrale, cantieri, infrastrutture critiche — ci sono sempre abbondanti caratteristiche stabili nella scena. Questo sistema funziona in modo affidabile in tali ambienti.
Conclusione
La deviazione fisica inferiore a 0,1° è raggiungibile e mantenibile a lungo termine tramite azionamento micro-step, encoder a ciclo chiuso e correzione visiva AI. La meccanica mantiene l'accuratezza. Il software la garantisce. Se hai bisogno di convalidare questi numeri per il tuo progetto specifico, contattaci — condividerò il nostro rapporto di test completo.
1. Gli encoder ottici offrono un rilevamento della posizione ad alta risoluzione leggendo i segni incrementali su un disco, fondamentale per un feedback inferiore a 0,1°. ︎↩︎ 2. Le trasmissioni a vite senza fine forniscono coppia elevata e autobloccaggio, mentre il design a gioco zero elimina il gioco meccanico che potrebbe causare errori di posizionamento. ︎↩︎ 3. La decelerazione a curva a S riduce lo stress meccanico e l'overshoot riducendo gradualmente la velocità del motore man mano che la telecamera si avvicina alla sua posizione target. ︎↩︎ 4. ONVIF è uno standard globale per dispositivi di sicurezza basati su IP; i suoi comandi consentono l'attivazione remota dell'autocalibrazione PTZ da VMS o software di terze parti. ︎↩︎ 5. I finecorsa meccanici sono i punti finali fisici del movimento di pan e tilt; la telecamera li utilizza come riferimenti noti durante l'autocalibrazione per reimpostare i valori degli encoder. ︎↩︎ 6. I conteggi degli encoder sono gli impulsi digitali generati da un encoder ottico; vengono convertiti in gradi angolari per tracciare e correggere le posizioni PTZ. ︎↩︎ 7. Milestone è una piattaforma VMS leader che si integra con telecamere PTZ conformi a ONVIF per una gestione e calibrazione dei preset senza interruzioni. ︎↩︎ 8. La precisione sub-pixel va oltre la risoluzione di un singolo pixel interpolando tra i pixel, essenziale per un allineamento fine nella sorveglianza ad alto zoom. ︎↩︎