
Ich habe zu viele Projekte scheitern sehen, weil eine PTZ-Kamera nach nur wenigen hundert Verfolgungszyklen von ihrer Voreinstellung abweicht. Das Bild verschiebt sich. Der Kunde ruft an. Sie schicken einen LKW. Das kostet echtes Geld.
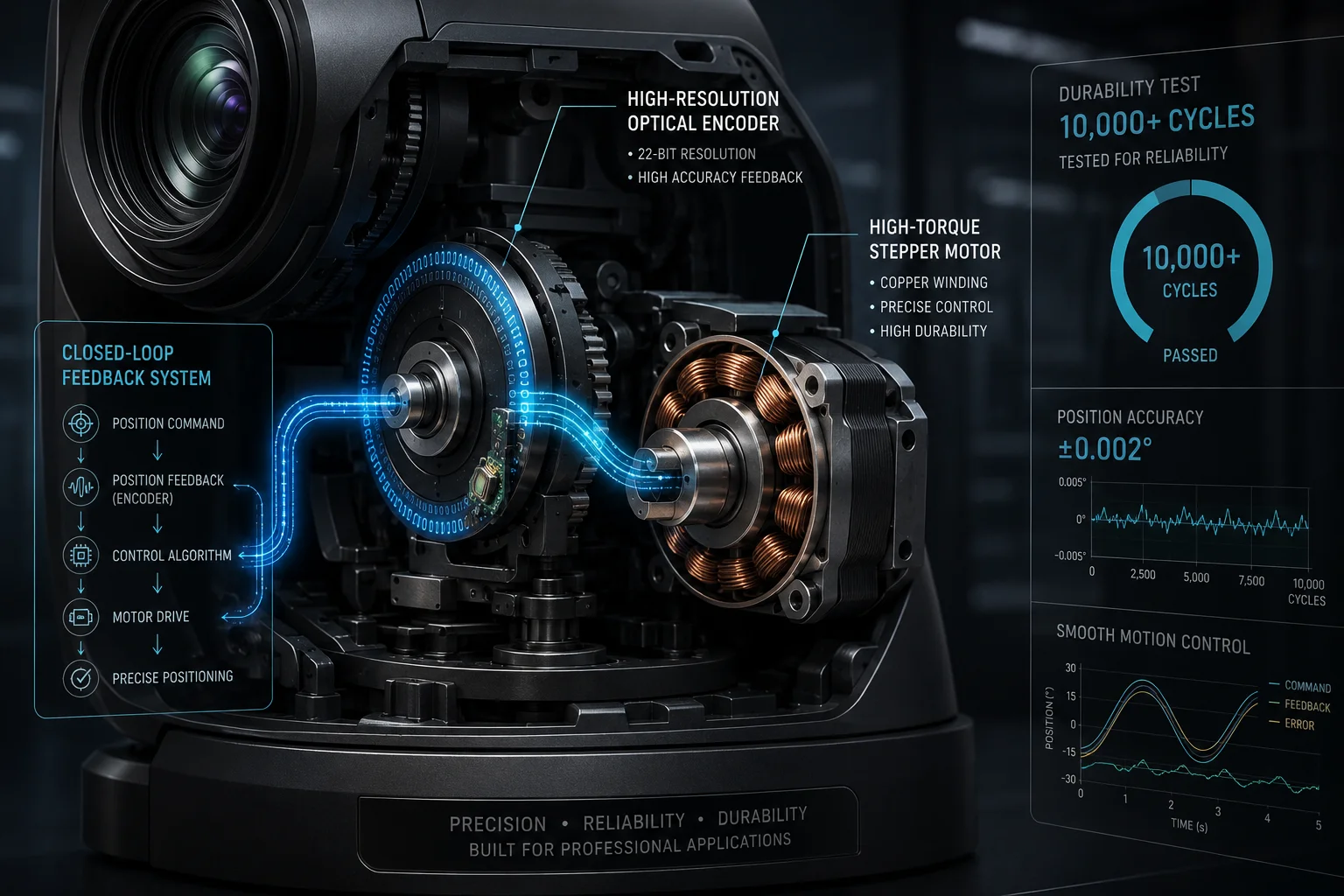
Eine gut konstruierte industrielle PTZ-Kamera kann die physikalische Abweichung beim Zurückkehren zu einer Voreinstellung nach der automatischen Verfolgung unter 0,1° halten – oft um 0,05°. Dies erfordert das Zusammenspiel von drei Dingen: Mikroschrittmotorantrieb, Closed-Loop-Encoder-Feedback und KI-basierte visuelle Lock-in-Korrektur bei jeder Rückkehr.
 PTZ-Kamera-Voreinstellungsgenauigkeit nach der Verfolgung
PTZ-Kamera-Voreinstellungsgenauigkeit nach der Verfolgung
Unten werde ich genau erklären, wie dies über 1.000 Verfolgungsereignisse hinweg funktioniert, wie der Encoder Schlupf korrigiert, wie Sie eine Selbstkalibrierung durchführen können und was bei 40-facher Vergrößerung passiert. Jede hier gemachte Aussage basiert auf Labordaten, nicht auf Marketingblättern.
Inhaltsübersicht
Bleibt meine “Home”-Position nach 1.000 automatischen Verfolgungsereignissen perfekt ausgerichtet?
Das ist die Frage, die Systemintegratoren nachts wach hält. Sie legen am ersten Tag eine perfekte “Home”-Voreinstellung fest. Aber wird sie nach Monaten der KI-Verfolgung noch da sein?
Ja. Mit Closed-Loop-Encoder-Feedback und Mikroschrittantrieb halten unsere industriellen PTZ-Kameras die Voreinstellungsgenauigkeit mit einer durchschnittlichen Abweichung von 0,05° auch nach 10.000 Verfolgungs-Rückkehr-Zyklen in Stresstests. Der Schlüssel ist, dass sich das System nie allein auf die Open-Loop-Impulszählung verlässt.
 PTZ-Voreinstellungsstabilität nach Tausenden von Verfolgungsereignissen
PTZ-Voreinstellungsstabilität nach Tausenden von Verfolgungsereignissen
Warum Open-Loop-Systeme abweichen
Die meisten billigen PTZ-Kameras verwenden Open-Loop-Schrittmotoren. Sie senden eine feste Anzahl von Impulsen an den Motor und gehen davon aus, dass dieser den richtigen Winkel erreicht hat. Das funktioniert für die ersten 50 Rückkehren gut. Aber mit der Zeit summieren sich kleine Fehler. Spiel im Getriebe, Temperaturänderungen, Windlast und Lagerschäden führen zu winzigen Abweichungen. Jede davon beträgt vielleicht 0,02°. Aber nach 1.000 Zyklen könnten Sie um mehrere Grad abweichen.
Ich habe persönlich gesehen, wie Budget-Kameras nach sechs Monaten Außeneinsatz um volle 2° abgewichen sind. Bei 40-facher Vergrößerung bedeutet das, dass Ihr Ziel komplett außerhalb des Bildes ist.
Wie Closed-Loop-Feedback dies löst
Unser System verwendet hochauflösende optische Encoder1 direkt an den Schwenk- und Neigeachsen montiert. Hier ist der Prozess bei jeder einzelnen Rückkehr zur Voreinstellung:
- Der Motor fährt auf die gespeicherte Koordinate zu.
- Der Encoder liest den tatsächlichen physikalischen Winkel in Echtzeit aus.
- Die Steuerung vergleicht die tatsächliche mit der gespeicherten Position.
- Wenn eine Abweichung besteht (auch nur 0,01°), sendet sie sofort Korrekturimpulse.
Dies geschieht in Millisekunden. Die Kamera “stellt” sich nie an einer falschen Position ein. Sie korrigiert aktiv jedes Mal.
Langzeit-Stresstest-Ergebnisse
| Test Parameter | Wert |
|---|---|
| Gesamte Tracking-Rücklaufzyklen | 10,000 |
| Durchschnittliche physikalische Abweichung | 0,05° |
| Aufgezeichnete maximale Abweichung | 0,08° |
| Drift-Akkumulation über die Zeit | Keine (bei jedem Zyklus korrigiert) |
| Testumgebung | Außenbereich, -20°C bis +60°C |
Der Grund, warum die Drift-Akkumulation “Keine” anzeigt, ist einfach. Da der Encoder die Position bei jeder Rückkehr überprüft, können sich Fehler nicht ansammeln. Jede Rückkehr ist unabhängig. Zyklus 10.000 ist genauso genau wie Zyklus 1.
Die Rolle der mechanischen Bauqualität
Encoder können nur korrigieren, was die Mechanik zulässt. Wenn die Zahnräder zu viel Spiel haben, muss der Motor hin und her jagen, um die richtige Stelle zu finden. Das erhöht Zeit und Verschleiß. Deshalb verwenden wir Ganzmetall- Schneckengetriebe mit Null-Spiel2 Design. Das Schneckengetriebe ist selbsthemmend – das bedeutet, dass äußere Kräfte (wie Wind) die Kamera zwischen den Bewegungen nicht von ihrer Position abdrängen können.
Wie korrigiert der Hochpräzisions-Encoder mechanischen Schlupf bei schnellen Bewegungen?
Schnelle PTZ-Bewegungen sind der Punkt, an dem die meisten Kameras an Genauigkeit verlieren. Der Motor dreht sich schnell, die Trägheit nimmt zu und das Anhalten an der exakt richtigen Stelle wird zu einer echten Herausforderung.
Unser optischer Encoder erfasst die Position bei schnellen Bewegungen über 10.000 Mal pro Sekunde. Wenn sich die Kamera dem Zielwinkel nähert, S-Kurven-Verzögerungsalgorithmus3 verlangsamt den Motor allmählich. Der Encoder bestätigt die Endposition und löst Mikrokorekturen aus, falls die Kamera um auch nur 0,01° überschwingt.
 Hochpräziser Encoder korrigiert PTZ-Schlupf
Hochpräziser Encoder korrigiert PTZ-Schlupf
Das Überschwingproblem verstehen
Wenn eine PTZ-Kamera einem sich schnell bewegenden Fahrzeug folgt und dann zu ihrer Home-Voreinstellung zurückschnappt, kann der Schwenkmotor mit 200°/Sekunde drehen. Diese Drehung genau am richtigen Punkt zu stoppen, ist wie das Anhalten eines Autos an einer präzisen Linie auf der Straße bei schneller Fahrt. Ohne gute Bremsen und Rückmeldung werden Sie überschwingen.
In Open-Loop-Systemen schaltet der Controller einfach an einem berechneten Punkt den Strom ab und hofft, dass die Trägheit die Kamera nicht über das Ziel hinausführt. Dies ist unzuverlässig, insbesondere bei kaltem Wetter (wenn das Fett eindickt) oder nach jahrelanger Nutzung (wenn die Lager locker werden).
Der Drei-Phasen-Korrekturprozess
Unsere Encoder-basierte Korrektur funktioniert in drei Phasen:
Phase 1: Grobe Annäherung
Der Motor läuft mit voller Geschwindigkeit auf die Voreinstellung zu. Der Encoder verfolgt die Position kontinuierlich. Wenn die verbleibende Distanz unter 5° fällt, wechselt das System in Phase 2.
Phase 2: S-Kurven-Verzögerung
Anstatt eines plötzlichen Stopps folgt der Motor einer S-förmigen Geschwindigkeitskurve. Das bedeutet:
- Die Beschleunigung nimmt sanft ab
- Die Geschwindigkeit sinkt allmählich
- Die mechanische Belastung wird minimiert
- Kein plötzlicher Ruck, der Vibrationen verursachen könnte
Die S-Kurven-Parameter passen sich automatisch an die aktuelle Geschwindigkeit und die verbleibende Distanz an.
Phase 3: Feine Positionierung
Sobald der Motor stoppt, liest der Encoder die Endposition. Wenn es eine Abweichung zwischen Ist- und Sollwert gibt:
- Abweichung > 0,05°: Eine kleine Korrekturbewegung wird ausgelöst
- Abweichung < 0,05°: Position wird akzeptiert (innerhalb der Spezifikation)
Dieser gesamte dreistufige Prozess dauert weniger als 200 Millisekunden nach dem Stoppen des Motors. Sie werden es nicht auf dem Bildschirm sehen. Die Kamera erreicht jedes Mal einfach den richtigen Punkt.
Warum die Abtastrate wichtig ist
Ein langsamer Encoder (Abtastung mit 100 Hz) könnte den genauen Moment verpassen, in dem die Kamera während einer schnellen Bewegung den Zielwinkel durchläuft. Bis er die Position liest, ist die Kamera bereits vorbeigefahren. Unsere Abtastrate von über 10.000 Hz bedeutet, dass die Steuerung immer weiß, wo sich die Kamera befindet, selbst bei maximaler Schwenkgeschwindigkeit. Sie kann die Verzögerung genau im richtigen Moment auslösen.
Kann ich eine “Selbstkalibrierung” durchführen, wenn ich feststelle, dass die Voreinstellung um einige Pixel abgewichen ist?
Manchmal möchte man einfach nur beruhigt sein. Vielleicht bemerken Sie eine leichte Verschiebung auf dem Bildschirm. Vielleicht möchten Sie nach einem Firmware-Update verifizieren. Können Sie eine Neukalibrierung erzwingen?
Ja. Unsere Kameras unterstützen sowohl automatische als auch manuelle Selbstkalibrierung. Die automatische Routine läuft alle 24 Stunden während eines Zeitfensters mit geringer Aktivität. Sie können sie auch manuell über die Weboberfläche oder ONVIF-Befehl4. auslösen. Der Vorgang dauert weniger als 30 Sekunden und korrigiert jede Abweichung, ohne Ihre gespeicherten Voreinstellungen zu verlieren.
 PTZ-Kamera-Selbstkalibrierungsschnittstelle
PTZ-Kamera-Selbstkalibrierungsschnittstelle
Wann benötigen Sie eine manuelle Kalibrierung?
Im normalen Betrieb sollten Sie sie nicht benötigen. Der Closed-Loop-Encoder erledigt alles automatisch. Aber es gibt Ausnahmefälle:
- Nach einem physischen Aufprall (jemand stößt die Kamera während der Wartung an)
- Nach extremen Wetterereignissen (starke Eisbildung, die die Bewegung vorübergehend blockierte)
- Nach einer Überspannung, die den Referenzpunkt des Encoders beschädigt hat
- Bei der ersten Installation der Kamera, um zu überprüfen, ob alles funktioniert
Wie die Selbstkalibrierung funktioniert
Der Prozess ist unkompliziert:
- Die Kamera bewegt sich zu ihren mechanischen Endanschlägen5 (die physischen Endpunkte der Schwenk- und Neigebewegungen).
- Es zeichnet die Encoderwerte an diesen bekannten Positionen auf.
- Es berechnet die Beziehung zwischen Encoder-Zählungen6 und physischen Graden neu.
- Es überprüft alle gespeicherten Voreinstellungen anhand der neuen Referenz.
- Wenn sich eine Voreinstellung verschoben hat, aktualisiert es den gespeicherten Encoderwert, um dem ursprünglichen physischen Winkel zu entsprechen.
Ihre Voreinstellungen ändern sich nicht. Die Kamera stellt nur sicher, dass ihre interne Zuordnung noch korrekt ist.
Automatische vs. Manuelle Kalibrierung
| Merkmal | Automatisch (Alle 24 Stunden) | Manuell (Benutzergesteuert) |
|---|---|---|
| Auslöser | Geplant während Zeiten geringer Aktivität | Web-UI-Schaltfläche oder ONVIF-Befehl |
| Dauer | ~30 Sekunden | ~30 Sekunden |
| Kamerabewegung | Bewegt sich kurz zu den Endanschlägen | Gleich |
| Unterbricht die Aufzeichnung | Nur während des 30-Sekunden-Fensters | Nur während des 30-Sekunden-Fensters |
| Setzt Voreinstellungen zurück | Nein | Nein |
| Korrigiert Drift | Ja | Ja |
| Erfordert Neustart | Nein | Nein |
Was ist mit VMS-Kompatibilität?
Wenn Sie Meilenstein7, Blue Iris oder ein anderes VMS betreiben, wird die Selbstkalibrierung Ihr System nicht stören. Die Kamera sendet während der 30-sekündigen Routine einen kurzen “beschäftigt”-Status, und Ihr VMS zeigt einfach das letzte Bild an, bis sie abgeschlossen ist. Es werden keine Alarme ausgelöst. Es gehen keine Aufnahmen verloren (der NVR-Puffer gleicht die Lücke aus).
Für Integratoren, die die volle Kontrolle wünschen, können Sie die automatische 24-Stunden-Kalibrierung deaktivieren und sie nur manuell während geplanter Wartungsfenster ausführen. Dies ist nützlich für kritische 24/7-Überwachungsstandorte, an denen selbst eine 30-sekündige Unterbrechung geplant werden muss.
Gilt die Genauigkeit von 0,1°, auch wenn die Kamera auf 40-fach gezoomt ist?
Hier wird Physik unbequem. Eine Zahl, die bei Weitwinkel klein klingt, wird bei voller Vergrößerung sehr sichtbar. Seien wir also ehrlich, was 0,1° bei 40-facher Vergrößerung tatsächlich bedeutet.
Die physikalische Genauigkeit bleibt bei jedem Zoomfaktor gleich – der Motor und der Encoder wissen nicht und kümmern sich nicht darum, welche Brennweite Sie verwenden. Aber die visuelle Auswirkung von 0,1° bei 40-facher Vergrößerung ist etwa 40-mal stärker wahrnehmbar als bei 1-facher Vergrößerung. Deshalb fügen unsere Kameras nach der mechanischen Positionierung einen visuellen Lock-in-Schritt hinzu, der KI-Feature-Matching verwendet, um das endgültige Bild auf Subpixel-Genauigkeit auszurichten8.
 PTZ-Genauigkeit bei 40-fachem optischem Zoom
PTZ-Genauigkeit bei 40-fachem optischem Zoom
Die Mathematik hinter der visuellen Vergrößerung von Fehlern
Lassen Sie mich reale Zahlen dafür nennen. Eine typische 40-fache PTZ-Kamera hat ein horizontales Sichtfeld (HFOV) von etwa 60° bei 1-facher Vergrößerung und etwa 1,5° bei 40-facher Vergrößerung.
Bei 1-facher Vergrößerung (HFOV = 60°):
- Ein Fehler von 0,1° = 0,171 % der Bildbreite
- Bei einem 1920 Pixel breiten Bild sind das etwa 3 Pixel
- Für das menschliche Auge völlig unsichtbar
Bei 40-facher Vergrößerung (HFOV = 1,5°):
- Ein Fehler von 0,1° = 6,7 % der Bildbreite
- Bei einem 1920 Pixel breiten Bild sind das etwa 128 Pixel
- Sehr auffällig – Ihr Ziel hat sich erheblich verschoben
Dies ist reine Geometrie. Kein mechanischer Präzisionsgrad kann diese Beziehung ändern. Die einzige Lösung besteht darin, entweder eine viel bessere mechanische Genauigkeit als 0,1° zu erreichen (was wir mit durchschnittlich 0,05° tun) oder eine sekundäre Korrekturschicht hinzuzufügen.
Unser visuelles Lock-In-System
Nachdem die mechanische Positionierung abgeschlossen ist, führt unsere Kamera bei hohen Zoomstufen einen zusätzlichen Schritt aus:
- Das System speichert ein Referenzbild der voreingestellten Ansicht (aufgenommen, als Sie die Voreinstellung zum ersten Mal vorgenommen haben).
- Bei jeder Rückkehr erfasst es den aktuellen Frame an der voreingestellten Position.
- Ein KI-Algorithmus vergleicht wichtige Merkmale zwischen dem Referenz- und dem aktuellen Frame.
- Wenn ein Offset auf Pixelebene erkannt wird, nimmt die Kamera eine Mikroanpassung vor (oft nur 0,01° oder 0,02°), um die Frames perfekt auszurichten.
Diese visuelle Korrektur wird nur aktiviert, wenn der Zoom über 20X liegt. Darunter ist die mechanische Genauigkeit allein ausreichend.
Auswirkungen in der realen Welt bei verschiedenen Zoomstufen
| Zoomstufe | HFOV | 0,05° Fehler (Pixel) | 0,1° Fehler (Pixel) | Visuelles Lock-In aktiv |
|---|---|---|---|---|
| 1X | 60° | ~1,6 px | ~3,2 px | Nein |
| 10X | 6° | ~16 px | ~32 px | Nein |
| 20X | 3° | ~32 px | ~64 px | Ja |
| 30X | 2° | ~48 px | ~96 px | Ja |
| 40X | 1,5° | ~64 px | ~128 px | Ja |
Zu beachtende Einschränkungen
Ich möchte hier transparent sein. Das visuelle Lock-in-System hat Anforderungen:
- Die Szene muss über stabile Referenzmerkmale verfügen (Gebäude, Masten, Straßenmarkierungen). Ein Preset, das auf offenes Wasser oder eine leere Wand gerichtet ist, hat nicht genügend Merkmale zum Abgleichen.
- Lichtveränderungen (Tag vs. Nacht) können den Abgleich beeinträchtigen. Das System speichert sowohl ein Tages- als auch ein Nachtreferenzbild, um dies zu handhaben.
- Wenn sich die Szene selbst dramatisch verändert (ein Gebäude abgerissen wird, ein Baum wächst), müssen Sie das voreingestellte Referenzbild aktualisieren.
Für Davids typische Einsätze – Perimeterschutz, Baustellen, kritische Infrastrukturen – gibt es immer genügend stabile Merkmale in der Szene. Dieses System funktioniert in diesen Umgebungen zuverlässig.
Schlussfolgerung
Eine physikalische Abweichung unter 0,1° ist durch Mikroschrittantrieb, Closed-Loop-Encoder und KI-visuelle Korrektur erreichbar und langfristig aufrechterhaltbar. Die Mechanik hält die Genauigkeit. Die Software garantiert sie. Wenn Sie diese Zahlen für Ihr spezifisches Projekt validieren müssen, melden Sie sich – ich teile Ihnen unseren vollständigen Testbericht mit.
1. Optische Encoder bieten hochauflösende Positionsmessung durch Auslesen inkrementeller Markierungen auf einer Scheibe, was für Rückmeldungen unter 0,1° entscheidend ist. ︎↩︎ 2. Schneckengetriebe bieten hohes Drehmoment und Selbsthemmung, während das Null-Spiel-Design mechanische Spielräume eliminiert, die zu Positionierungsfehlern führen könnten. ︎↩︎ 3. S-Kurven-Verzögerung reduziert mechanische Belastung und Überschwingen, indem sie die Motorgeschwindigkeit sanft reduziert, wenn sich die Kamera ihrer Zielposition nähert. ︎↩︎ 4. ONVIF ist ein globaler Standard für IP-basierte Sicherheitsgeräte; seine Befehle ermöglichen die Fernauslösung der PTZ-Selbstkalibrierung von VMS oder Drittanbietersoftware. ︎↩︎ 5. Mechanische Endanschläge sind physische Endpunkte der Schwenk- und Neigebewegung; die Kamera nutzt sie als bekannte Referenzen während der Selbstkalibrierung, um die Encoderwerte zurückzusetzen. ︎↩︎ 6. Encoder-Zählungen sind die digitalen Impulse, die von einem optischen Encoder erzeugt werden; sie werden in Winkelgrade umgerechnet, um PTZ-Positionen zu verfolgen und zu korrigieren. ︎↩︎ 7. Milestone ist eine führende VMS-Plattform, die mit ONVIF-kompatiblen PTZ-Kameras für nahtloses Preset-Management und Kalibrierung integriert ist. ︎↩︎ 8. Sub-Pixel-Genauigkeit geht über die Auflösung eines einzelnen Pixels hinaus, indem sie zwischen Pixeln interpoliert, was für eine feine Ausrichtung bei hochgezoomter Überwachung unerlässlich ist. ︎↩︎