
J'ai vu trop de projets échouer parce qu'une caméra PTZ dérive de son préréglage après seulement quelques centaines de cycles de suivi. L'image se décale. Le client appelle. Vous envoyez une dépanneuse. Cela coûte cher.
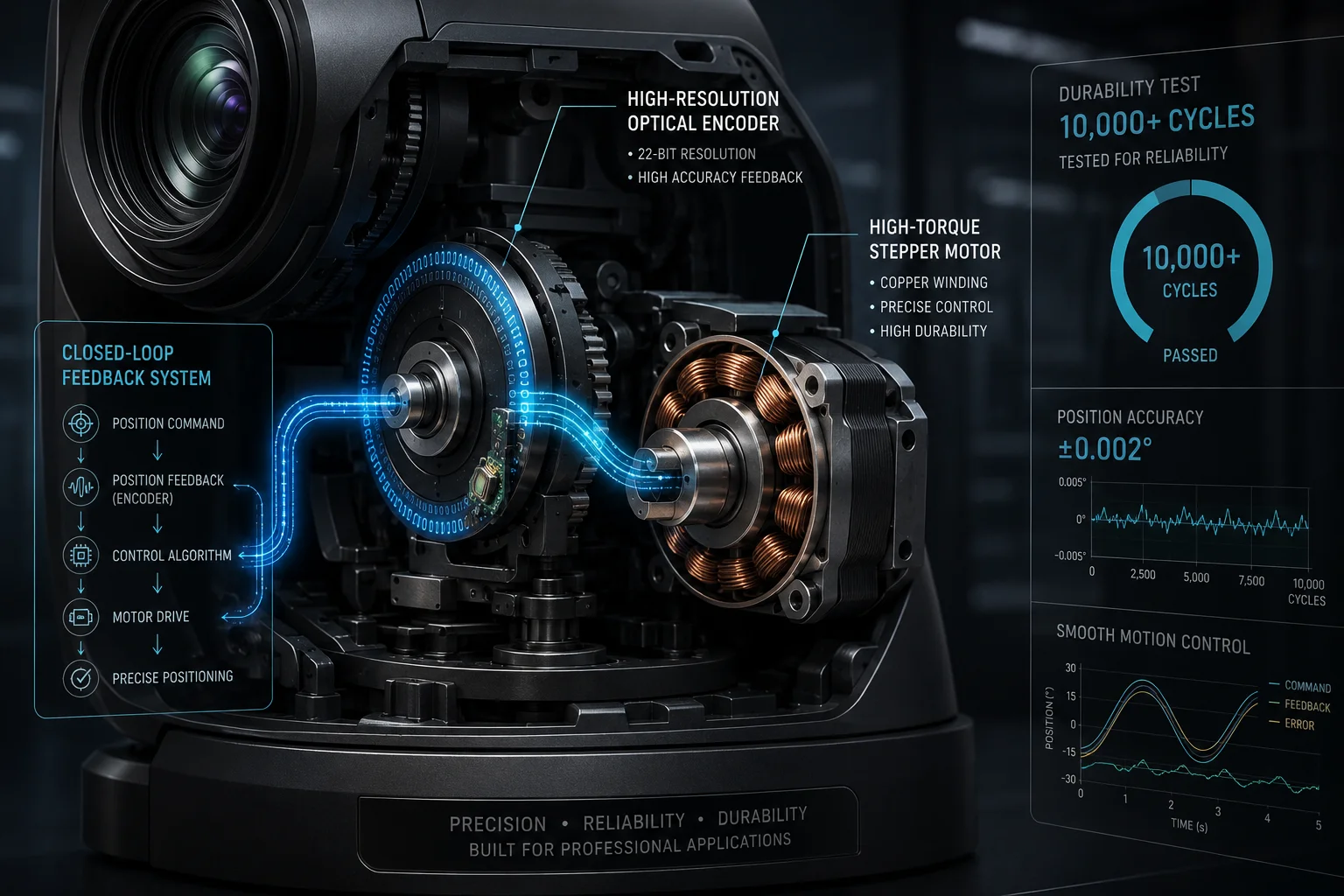
Une caméra PTZ industrielle bien conçue peut maintenir un écart physique inférieur à 0,1° — souvent autour de 0,05° — lors du retour à un préréglage après un suivi automatique. Cela nécessite trois éléments fonctionnant ensemble : un entraînement par micro-pas, une rétroaction d'encodeur en boucle fermée et une correction de verrouillage visuel basée sur l'IA à chaque retour.
 Précision des préréglages de caméra PTZ après suivi
Précision des préréglages de caméra PTZ après suivi
Ci-dessous, j'expliquerai en détail comment cela fonctionne sur plus de 1 000 événements de suivi, comment l'encodeur corrige le glissement, comment vous pouvez vous auto-calibrer et ce qui se passe à un zoom 40X. Toutes les affirmations ici proviennent de données testées en laboratoire, pas de fiches marketing.
Table des matières
Ma position “ Domicile ” restera-t-elle parfaitement alignée après 1 000 événements de suivi automatique ?
C'est la question qui empêche les intégrateurs de systèmes de dormir la nuit. Vous définissez un préréglage “ Domicile ” parfait le premier jour. Mais après des mois de suivi par IA, sera-t-il toujours là ?
Oui. Grâce à la rétroaction de l'encodeur en boucle fermée et à l'entraînement par micro-pas, nos caméras PTZ industrielles maintiennent l'alignement des préréglages avec un écart moyen inférieur à 0,05° même après 10 000 cycles de suivi-retour lors de tests de stress. La clé est que le système ne repose jamais uniquement sur le comptage d'impulsions en boucle ouverte.
 Stabilité des préréglages PTZ après des milliers d'événements de suivi
Stabilité des préréglages PTZ après des milliers d'événements de suivi
Pourquoi les systèmes en boucle ouverte dérivent
La plupart des caméras PTZ bon marché utilisent des moteurs pas à pas en boucle ouverte. Ils envoient un nombre fixe d'impulsions au moteur et supposent qu'il a atteint le bon angle. Cela fonctionne bien pour les 50 premiers retours. Mais avec le temps, de petites erreurs s'accumulent. Le jeu des engrenages, les changements de température, la charge du vent et l'usure des roulements introduisent tous de minuscules décalages. Chacun représente peut-être 0,02°. Mais après 1 000 cycles, vous pourriez être décalé de plusieurs degrés.
J'ai personnellement vu des caméras économiques dériver de 2° après six mois d'utilisation en extérieur. À un zoom 40X, cela signifie que votre cible est complètement hors champ.
Comment la rétroaction en boucle fermée résout ce problème
Notre système utilise des encodeurs optiques optiques1 haute résolution montés directement sur les arbres de panoramique et d'inclinaison. Voici le processus à chaque retour au préréglage :
- Le moteur se dirige vers la coordonnée stockée.
- L'encodeur lit l'angle physique réel en temps réel.
- Le contrôleur compare la position réelle par rapport à la position stockée.
- S'il existe un écart (même 0,01°), il envoie immédiatement des impulsions de correction.
Cela se produit en quelques millisecondes. La caméra ne “s'arrête” jamais à une mauvaise position. Elle corrige activement à chaque fois.
Résultats des tests de stress à long terme
| Paramètre d'essai | Valeur |
|---|---|
| Cycles totaux de suivi-retour | 10,000 |
| Déviation physique moyenne | 0,05° |
| Déviation maximale enregistrée | 0,08° |
| Accumulation de dérive dans le temps | Aucune (corrigée à chaque cycle) |
| Environnement de test | Extérieur, -20°C à +60°C |
La raison pour laquelle l'accumulation de dérive indique “Aucune” est simple. Comme l'encodeur vérifie la position à chaque retour, les erreurs ne peuvent pas s'accumuler. Chaque retour est indépendant. Le cycle 10 000 est aussi précis que le cycle 1.
Le rôle de la qualité de fabrication mécanique
Les encodeurs ne peuvent corriger que ce que la mécanique permet. Si les engrenages ont trop de jeu, le moteur doit aller et venir pour trouver le bon endroit. Cela ajoute du temps et de l'usure. C'est pourquoi nous utilisons des entraînements à vis sans fin entièrement métalliques avec une conception sans jeu2 . La vis sans fin est autobloquante, ce qui signifie que les forces externes (comme le vent) ne peuvent pas faire sortir la caméra de sa position entre les mouvements.
Comment l'encodeur de haute précision corrige-t-il tout glissement mécanique lors de mouvements rapides ?
Les mouvements PTZ rapides sont là où la plupart des caméras perdent en précision. Le moteur tourne rapidement, l'inertie s'accumule et s'arrêter à l'endroit exact devient un véritable défi.
Notre encodeur optique échantillonne la position à plus de 10 000 fois par seconde lors des mouvements rapides. Lorsque la caméra approche de l'angle cible, un algorithme de décélération en courbe en S3 ralentit progressivement le moteur. L'encodeur confirme la position finale et déclenche des micro-corrections si la caméra dépasse de ne serait-ce que 0,01°.
 Encodeur de haute précision corrigeant le glissement PTZ
Encodeur de haute précision corrigeant le glissement PTZ
Comprendre le problème du dépassement
Lorsqu'une caméra PTZ suit un véhicule en mouvement rapide puis revient à son préréglage d'origine, le moteur de panoramique peut tourner à 200°/seconde. Arrêter cette rotation exactement au bon point, c'est comme arrêter une voiture à une ligne précise sur la route en roulant vite. Sans bons freins et bon retour d'information, vous dépasserez.
Dans les systèmes en boucle ouverte, le contrôleur coupe simplement l'alimentation à un point calculé et espère que l'inertie n'emportera pas la caméra au-delà de la cible. C'est peu fiable, surtout par temps froid (lorsque la graisse épaissit) ou après des années d'utilisation (lorsque les roulements se desserrent).
Le processus de correction triphasé
Notre correction basée sur encodeur fonctionne en trois phases :
Phase 1 : Approche grossière
Le moteur tourne à pleine vitesse vers le préréglage. L'encodeur suit la position en continu. Lorsque la distance restante descend en dessous de 5°, le système entre dans la Phase 2.
Phase 2 : Décélération en courbe en S
Au lieu d'un arrêt brutal, le moteur suit une courbe de vitesse en forme de S. Cela signifie :
- L'accélération diminue en douceur
- La vitesse diminue progressivement
- Le stress mécanique est minimisé
- Pas de secousse soudaine pouvant causer des vibrations
Les paramètres de la courbe en S s'ajustent automatiquement en fonction de la vitesse actuelle et de la distance restante.
Phase 3 : Positionnement fin
Une fois le moteur arrêté, l'encodeur lit la position finale. S'il y a un écart entre la position réelle et la position cible :
- Écart > 0,05° : Un léger mouvement de correction est déclenché
- Écart < 0,05° : La position est acceptée (dans les spécifications)
L'ensemble de ce processus en trois phases prend moins de 200 millisecondes après l'arrêt du moteur. Vous ne le verrez pas à l'écran. La caméra arrive simplement au bon endroit, à chaque fois.
Pourquoi la fréquence d'échantillonnage est importante
Un encodeur lent (échantillonnant à 100 Hz) pourrait manquer le moment exact où la caméra passe l'angle cible lors d'un mouvement rapide. Au moment où il lit la position, la caméra est déjà passée. Notre fréquence d'échantillonnage de plus de 10 000 Hz signifie que le contrôleur sait toujours où se trouve la caméra, même à vitesse de panoramique maximale. Il peut déclencher le ralentissement au moment précis.
Puis-je effectuer une “ auto-calibration ” si je remarque que le préréglage a dérivé de quelques pixels ?
Parfois, vous voulez simplement être tranquille. Peut-être remarquez-vous un léger décalage à l'écran. Peut-être voulez-vous vérifier après une mise à jour du firmware. Pouvez-vous forcer un recalibrage ?
Oui. Nos caméras prennent en charge l'auto-calibrage automatique et manuel. La routine automatique s'exécute toutes les 24 heures pendant une période de faible activité. Vous pouvez également la déclencher manuellement via l'interface web ou une commande ONVIF4. Le processus prend moins de 30 secondes et corrige tout dérive sans perdre vos préréglages enregistrés.
 Interface d'auto-calibrage de la caméra PTZ
Interface d'auto-calibrage de la caméra PTZ
Quand auriez-vous besoin d'un calibrage manuel ?
En fonctionnement normal, vous n'en aurez pas besoin. L'encodeur en boucle fermée gère tout automatiquement. Mais il existe des cas limites :
- Après un impact physique (quelqu'un heurte la caméra pendant la maintenance)
- Après des événements météorologiques extrêmes (accumulation importante de glace qui a temporairement bloqué le mouvement)
- Après une surtension qui a corrompu le point de référence de l'encodeur
- Lors de la première installation de la caméra et que vous souhaitez vérifier que tout fonctionne
Comment fonctionne l'auto-calibrage
Le processus est simple :
- La caméra se déplace vers ses arrêts limites mécaniques5 (les extrémités physiques des déplacements panoramique et d'inclinaison).
- Il enregistre les valeurs de l'encodeur à ces positions connues.
- Il recalcule la relation entre les impulsions de l'encodeur6 et les degrés physiques.
- Il vérifie tous les préréglages stockés par rapport à la nouvelle référence.
- Si un préréglage a dévié, il met à jour la valeur de l'encodeur stockée pour correspondre à l'angle physique d'origine.
Vos préréglages ne changent pas. La caméra s'assure simplement que sa carte interne est toujours précise.
Étalonnage automatique vs manuel
| Fonctionnalité | Automatique (toutes les 24h) | Manuel (déclenché par l'utilisateur) |
|---|---|---|
| Déclencheur | Planifié pendant les heures de faible activité | Bouton de l'interface utilisateur Web ou commande ONVIF |
| La durée | ~30 secondes | ~30 secondes |
| Mouvement de la caméra | Se déplace brièvement vers les butées limites | Identique |
| Interrompt l'enregistrement | Uniquement pendant la fenêtre de 30 secondes | Uniquement pendant la fenêtre de 30 secondes |
| Réinitialise les préréglages | Non | Non |
| Corrige la dérive | Oui | Oui |
| Nécessite un redémarrage | Non | Non |
Qu'en est-il de la compatibilité VMS ?
Si vous utilisez Jalon7, Blue Iris ou un autre VMS, l'auto-étalonnage ne perturbera pas votre système. La caméra envoie un bref statut “occupé” pendant la routine de 30 secondes, et votre VMS affichera simplement la dernière image jusqu'à ce qu'elle soit terminée. Aucune alarme n'est déclenchée. Aucun enregistrement n'est perdu (le tampon du NVR gère le décalage).
Pour les intégrateurs qui souhaitent un contrôle total, vous pouvez désactiver l'étalonnage automatique 24 heures sur 24 et ne l'exécuter manuellement que pendant les fenêtres de maintenance planifiées. Ceci est utile pour les sites de surveillance critiques 24h/24 et 7j/7 où même une interruption de 30 secondes doit être planifiée.
La précision de 0,1° est-elle toujours valable même lorsque la caméra est zoomée à 40X ?
C'est là que la physique devient inconfortable. Un chiffre qui semble petit à grand angle devient très visible à zoom maximum. Soyons donc honnêtes quant à ce que 0,1° signifie réellement à 40X.
La précision physique reste la même à n'importe quel niveau de zoom — le moteur et l'encodeur ne savent pas et ne se soucient pas de la distance focale que vous utilisez. Mais l'impact visuel de 0,1° à 40X est environ 40 fois plus perceptible qu'à 1X. C'est pourquoi nos caméras ajoutent une étape de verrouillage visuel après le positionnement mécanique, en utilisant la correspondance de caractéristiques IA pour aligner l'image finale sur une précision sub-pixel8.
 Précision PTZ à zoom optique 40X
Précision PTZ à zoom optique 40X
Les mathématiques derrière la magnification visuelle de l'erreur
Mettons des chiffres réels sur cela. Une caméra PTZ 40X typique a un champ de vision horizontal (HFOV) d'environ 60° à 1X et d'environ 1,5° à 40X.
À 1X (HFOV = 60°) :
- Une erreur de 0,1° = 0,171% de la largeur de l'image
- Sur une image de 1920 pixels de large, cela représente environ 3 pixels
- Complètement invisible à l'œil humain
À 40X (HFOV = 1,5°) :
- Une erreur de 0,1° = 6,7% de la largeur de l'image
- Sur une image de 1920 pixels de large, cela représente environ 128 pixels
- Très perceptible — votre cible a considérablement décalé
Ceci est de la géométrie pure. Aucune précision mécanique ne peut modifier cette relation. La seule solution est soit d'atteindre une précision mécanique bien meilleure que 0,1° (ce que nous faisons, avec une moyenne de 0,05°), soit d'ajouter une couche de correction secondaire.
Notre système de verrouillage visuel
Une fois le positionnement mécanique terminé, notre caméra effectue une étape supplémentaire à des niveaux de zoom élevés :
- Le système enregistre une image de référence de la vue prédéfinie (capturée lors de la première configuration du préréglage).
- À chaque retour, il capture l'image actuelle à la position prédéfinie.
- Un algorithme d'IA compare les points de repère clés entre l'image de référence et l'image actuelle.
- Si un décalage au niveau des pixels est détecté, la caméra effectue un micro-ajustement (souvent seulement 0,01° ou 0,02°) pour aligner parfaitement les images.
Cette correction visuelle ne s'active que lorsque le zoom est supérieur à 20X. En dessous, la précision mécanique seule est suffisante.
Impact dans le monde réel à différents niveaux de zoom
| Niveau de zoom | HFOV | Erreur de 0,05° (Pixels) | Erreur de 0,1° (Pixels) | Verrouillage visuel actif |
|---|---|---|---|---|
| 1X | 60° | ~1,6 px | ~3,2 px | Non |
| 10X | 6° | ~16 px | ~32 px | Non |
| 20X | 3° | ~32 px | ~64 px | Oui |
| 30X | 2° | ~48 px | ~96 px | Oui |
| 40X | 1,5° | ~64 px | ~128 px | Oui |
Limitations à connaître
Je veux être transparent ici. Le système de verrouillage visuel a des exigences :
- La scène doit comporter des caractéristiques de référence stables (bâtiments, poteaux, marquages routiers). Un préréglage pointant vers l'eau libre ou un mur blanc n'aura pas assez de caractéristiques à faire correspondre.
- Les changements d'éclairage (jour vs nuit) peuvent affecter la correspondance. Le système stocke une image de référence de jour et de nuit pour gérer cela.
- Si la scène elle-même change radicalement (un bâtiment est démoli, un arbre pousse), vous devrez mettre à jour l'image de référence préréglée.
Pour les déploiements typiques de David — sécurité périmétrique, sites de construction, infrastructures critiques — il y a toujours de nombreuses caractéristiques stables dans la scène. Ce système fonctionne de manière fiable dans ces environnements.
Conclusion
Un écart physique inférieur à 0,1° est réalisable et maintenable à long terme grâce à un entraînement par micro-pas, des encodeurs en boucle fermée et une correction visuelle par IA. La mécanique maintient la précision. Le logiciel la garantit. Si vous avez besoin de valider ces chiffres pour votre projet spécifique, contactez-nous — je partagerai notre rapport de test complet.
1. Les encodeurs optiques offrent une détection de position haute résolution en lisant des marques incrémentielles sur un disque, ce qui est essentiel pour un retour d'information inférieur à 0,1°. ︎↩︎ 2. Les entraînements à vis sans fin fournissent un couple élevé et un auto-blocage, tandis que la conception sans jeu élimine le jeu mécanique qui pourrait causer des erreurs de positionnement. ︎↩︎ 3. La décélération en courbe en S réduit le stress mécanique et le dépassement en réduisant progressivement la vitesse du moteur à l'approche de la caméra de sa position cible. ︎↩︎ 4. ONVIF est une norme mondiale pour les appareils de sécurité basés sur IP ; ses commandes permettent le déclenchement à distance de l'auto-étalonnage PTZ à partir du VMS ou d'un logiciel tiers. ︎↩︎ 5. Les butées mécaniques sont les extrémités physiques du mouvement panoramique et d'inclinaison ; la caméra les utilise comme références connues lors de l'auto-étalonnage pour réinitialiser les valeurs de l'encodeur. ︎↩︎ 6. Les comptages d'encodeur sont les impulsions numériques générées par un encodeur optique ; ils sont convertis en degrés angulaires pour suivre et corriger les positions PTZ. ︎↩︎ 7. Milestone est une plateforme VMS leader qui s'intègre aux caméras PTZ conformes ONVIF pour une gestion et un étalonnage des préréglages transparents. ︎↩︎ 8. La précision sub-pixel va au-delà de la résolution d'un seul pixel en interpolant entre les pixels, ce qui est essentiel pour un alignement fin dans la surveillance à zoom élevé. ︎↩︎