
Já vi motores de passo falharem em campo após apenas um verão. A causa raiz é quase sempre a mesma: nenhum plano de gerenciamento térmico para altas temperaturas ambientes.
A 50°C (122°F), os motores de passo operam perto do ponto crítico de sua classe de isolamento. Sem lógica de controle de corrente adequada e projeto de dissipação de calor, a vida útil do enrolamento do motor cai rapidamente. Controladores de grau industrial usam escalonamento de corrente adaptativo, otimização PWM e ponte térmica física para manter os motores funcionando em calor extremo.
 dissipação de calor do motor de passo lógica de controle de corrente 50 graus
dissipação de calor do motor de passo lógica de controle de corrente 50 graus
Abaixo, detalharei a lógica exata e o projeto de hardware que mantêm os motores de passo PTZ funcionando de forma confiável quando o próprio ar já está quente o suficiente para cozinhar eletrônicos. Cada seção responde a uma pergunta específica que ouço de integradores de sistemas que trabalham em locais como Texas, Oriente Médio e Sudeste Asiático.
Índice
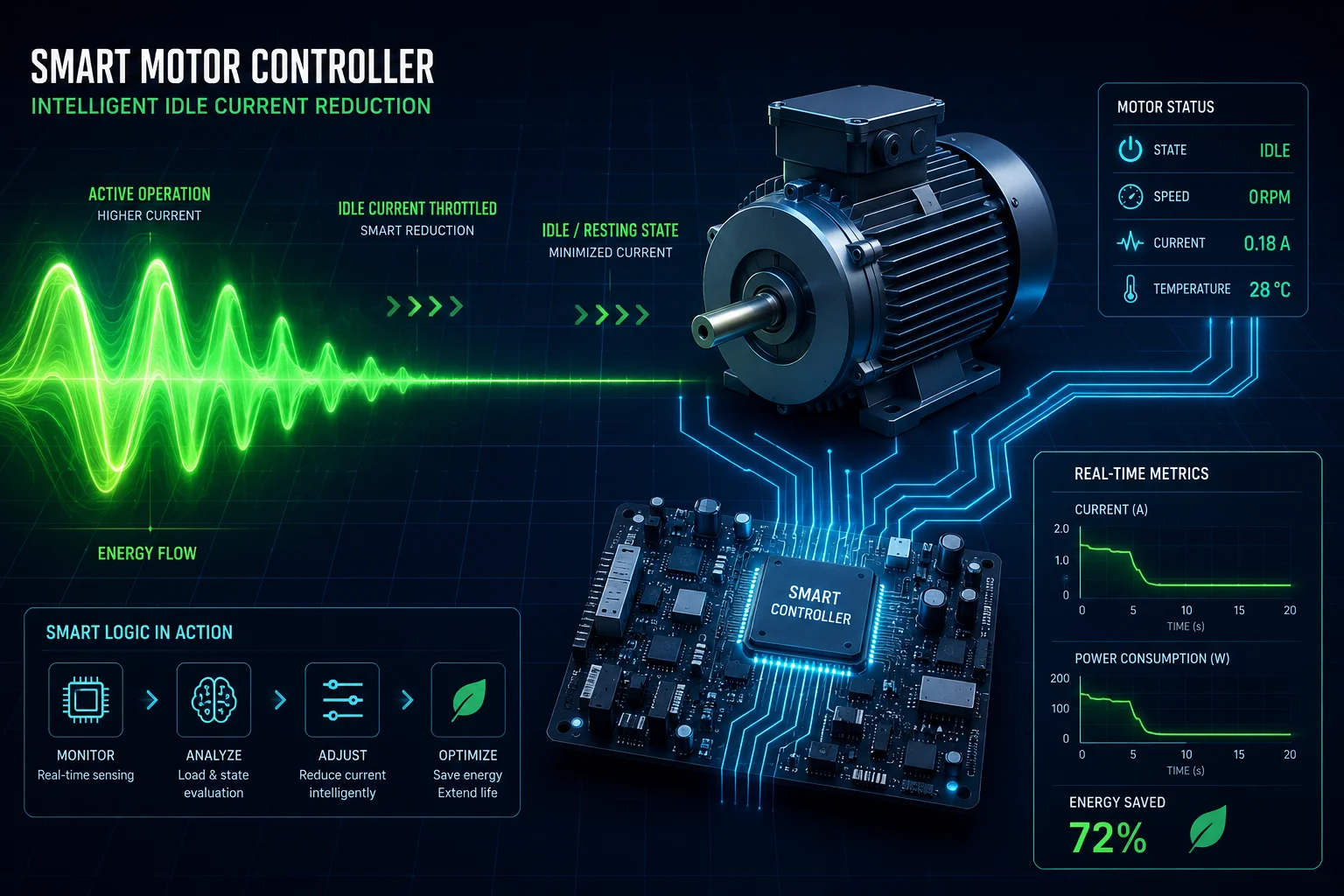
O Controlador do Motor Usa “Escalonamento Inteligente de Corrente” para Reduzir o Calor Quando o PTZ Está Inativo?
A maior parte do dano térmico que vi em campo acontece não durante o movimento, mas quando o motor está parado. As pessoas esquecem que um motor de passo consome corrente de retenção mesmo quando não está se movendo.
Sim. Controladores PTZ industriais usam redução automática de corrente de inatividade. Quando o motor para de se mover por 100–500ms, o driver corta a corrente para 30%–50% do valor de funcionamento. Este único recurso evita a causa mais comum de falha térmica: acúmulo de calor durante a parada.
 escalonamento inteligente de corrente PTZ inativo motor de passo
escalonamento inteligente de corrente PTZ inativo motor de passo
Por Que a Corrente de Inatividade é o Assassino Silencioso
Um motor de passo gera calor através da perda de cobre. A fórmula é simples: P = I^2R. Perda de potência é igual à corrente ao quadrado vezes a resistência. Isso significa que se você cortar a corrente pela metade, você reduz a geração de calor em 75%. Essa é uma diferença enorme quando o motor fica inativo por horas entre as varreduras de patrulha.
Em uma implantação típica de vigilância PTZ, a câmera passa 80%–90% do seu tempo em uma posição fixa. Durante esse tempo, o motor ainda precisa de alguma corrente para manter sua posição contra a carga do vento. Mas não precisa de corrente total de funcionamento. O escalonamento inteligente de corrente resolve isso usando uma lógica de redução baseada em temporizador:
O Fluxo da Lógica de Redução
- O motor completa seu último movimento comandado.
- Um temporizador é iniciado (tipicamente 100–500ms, configurável).
- Se nenhum novo comando de movimento chegar, o driver reduz a corrente de fase para o nível de inatividade predefinido.
- Se um novo comando chegar, a corrente volta ao máximo em menos de 10ms.
Essa lógica está integrada na maioria dos drivers de motor de passo modernos, como o TMC22092 ou o TMC5160 da Trinamic3. O parâmetro chave é chamado “TPOWERDOWN4” — o atraso antes que a redução de corrente entre em vigor.
Configurações de Escala de Corrente para Ambientes de 50°C
| Parâmetro | Configuração Padrão (25°C) | Configuração Recomendada (50°C) | Razão |
|---|---|---|---|
| Corrente de Funcionamento | 100% da nominal | 70%–85% da nominal | Deixar margem térmica |
| Corrente de Inatividade | 50%–70% da nominal | 30%–50% da nominal | Prevenir acúmulo de calor em standstill |
| Atraso de Desligamento | 500ms | 100–200ms | Reduzir o tempo ocioso com corrente total |
| Tempo de Rampa de Corrente | 10ms | 10ms | Nenhuma alteração necessária para capacidade de resposta |
Corrente Adaptativa à Carga (Sistemas de Malha Fechada)
Para sistemas PTZ com um encoder no eixo do motor, o controlador pode fazer algo ainda mais inteligente. Ele mede a demanda real de torque em tempo real. Se o vento estiver calmo e a câmera for leve, o controlador envia apenas a corrente que o motor realmente precisa. Isso é chamado de controle de corrente adaptativo à carga5.
Em um ambiente de 50°C, essa abordagem pode reduzir o consumo médio de energia em 30%–40% em comparação com sistemas de malha aberta que sempre operam com corrente máxima. A desvantagem é o custo — você precisa de um encoder e um driver de malha fechada. Mas para um sistema que deve durar 10 anos em um poste sob luz solar direta, o investimento se paga com a economia de visitas técnicas.
Como o Sistema Evita que a “Deriva Térmica” do Motor Afete a Precisão do Rastreamento em Pleno Verão?
Integradores me disseram que suas câmeras PTZ perdem lentamente a precisão de apontamento à medida que o dia esquenta. Eles recalibram pela manhã e, às 14h, os presets estão com alguns décimos de grau de diferença. Isso é deriva térmica.
Deriva térmica6 ocorre porque o calor altera as dimensões físicas dos componentes do motor e as propriedades magnéticas do rotor. Para evitar isso, os sistemas PTZ industriais usam correção de malha fechada baseada em encoder7, firmware com compensação de temperatura e projetos mecânicos que restringem a expansão térmica a eixos previsíveis.
 deriva térmica precisão de rastreamento de motor de passo PTZ
deriva térmica precisão de rastreamento de motor de passo PTZ
O Que Causa Deriva Térmica em Motores de Passo
Quando um motor de passo aquece de 25°C para 90°C (o que é comum a 50°C ambiente sob carga), várias coisas mudam:
- A resistência do enrolamento aumenta. O cobre tem um coeficiente de temperatura positivo de cerca de 0,39% por °C. Uma elevação de 65°C significa que a resistência aumenta em aproximadamente 25%. Isso reduz o torque disponível com a mesma tensão.
- A força do ímã diminui. Ímãs de neodímio perdem cerca de 0,11% de sua força de campo por °C. A 90°C, os ímãs do rotor são cerca de 7% mais fracos do que à temperatura ambiente.
- Expansão mecânica. A carcaça de alumínio expande. O eixo de aço expande a uma taxa diferente. A pré-carga do rolamento muda. Tudo isso introduz micro-folgas na transmissão de engrenagens.
Como o Firmware Compensa
Controladores PTZ modernos armazenam uma tabela de consulta de temperatura versus deslocamento no firmware. Veja como funciona o loop de compensação:
- Um termistor no corpo do motor reporta a temperatura a cada 500ms.
- O firmware consulta o deslocamento posicional esperado para essa temperatura.
- O controlador aplica um fator de correção a todas as posições predefinidas.
- Se o sistema tiver um encoder, ele também verifica cruzado o ângulo real do eixo com o ângulo comandado.
Escolhas de Design Mecânico que Reduzem a Deriva
A melhor abordagem é minimizar a deriva no nível de hardware para que o firmware tenha menos trabalho a fazer:
- Materiais de expansão térmica combinados. Use engrenagens de aço com eixos de aço, não montagens mistas de alumínio-aço.
- Rolamentos pré-carregados. Rolamentos de contato angular com mola mantêm folga consistente em uma ampla faixa de temperatura.
- Transmissões de engrenagens curtas. Cada engrenamento é uma fonte de folga que piora com o calor. Menos engrenagens significam menos erro acumulado.
Tabela de Orçamento de Deriva
| Fonte de Deriva | Magnitude a 90°C de Temperatura do Motor | Mitigação |
|---|---|---|
| Mudança na resistência de enrolamento | Indireto (perda de torque, não posição) | Aumento de corrente em malha fechada |
| Enfraquecimento do ímã | ~0,05° de erro de apontamento | Correção do encoder |
| Expansão térmica da carcaça | ~0,02° por eixo | Materiais combinados |
| Aumento da folga da engrenagem | ~0,1° no pior caso | Engrenagens anti-folga pré-carregadas |
| Deriva total não compensada | ~0,17° | — |
| Após correção de firmware | <0,03° | Encoder + tabela de consulta |
Para uma câmera com zoom 38X em teleobjetiva máxima, 0,17° de deriva movem o centro da imagem em vários metros a um alcance de 500m. Isso é o suficiente para perder um alvo rastreado. Após a compensação, 0,03° mantém o alvo bem dentro do quadro.
Existe um Termistor Interno no Motor para Acionar um Desligamento de Segurança em Temperaturas Críticas?
Sempre faço essa pergunta ao avaliar um novo fornecedor de motores. Se a resposta for “não”, eu desisto. Um motor sem proteção térmica em um ambiente de 50°C é um risco de incêndio.
Sim, motores de passo de grau industrial projetados para uso externo em PTZ incluem um embutido Termistor NTC8 (tipicamente 10kΩ a 25°C) diretamente enrolado no enrolamento do estator. Quando a temperatura do enrolamento atinge 130°C (Classe B) ou 155°C (Classe F), o controlador aciona uma resposta escalonada: primeiro redução de corrente9, depois um desligamento controlado se a temperatura continuar a subir.
 temperatura de desligamento de segurança do motor de passo termistor
temperatura de desligamento de segurança do motor de passo termistor
Por que a detecção de temperatura externa não é suficiente
Alguns sistemas mais baratos medem apenas a temperatura da placa do driver ou a temperatura ambiente do ar. Isso é um problema. O ponto mais quente do sistema é sempre o próprio enrolamento do motor. O enrolamento pode ser 40°C–60°C mais quente do que a superfície da carcaça do motor. Quando a carcaça estiver perigosamente quente ao toque, o isolamento do enrolamento já estará se degradando.
Um termistor embutido fica dentro do slot do estator, em contato térmico direto com o fio de cobre. Ele lê a temperatura real do enrolamento com apenas 2–3 segundos de defasagem térmica. Isso dá ao controlador tempo suficiente para reagir antes que ocorra danos.
A Lógica de Proteção Térmica Escalonada
Um sistema bem projetado não apenas corta a energia quando as coisas esquentam. Ele usa uma resposta graduada:
Estágio 1: Redução Suave (Zona de Aviso)
- Gatilho: A temperatura do enrolamento atinge 110°C (Classe B) ou 135°C (Classe F).
- Ação: O controlador reduz a corrente máxima em 20%. O motor desacelera, mas continua funcionando.
- Notificação: O sistema registra um aviso térmico. Se conectado a um VMS, envia um alerta.
Estágio 2: Redução Severa (Zona de Perigo)
- Gatilho: A temperatura continua a subir para 125°C (Classe B) ou 150°C (Classe F).
- Ação: A corrente cai para 50%. Apenas movimentos lentos e essenciais são permitidos.
- Notificação: Alarme crítico enviado. O sistema recomenda intervenção do operador.
Estágio 3: Desligamento Controlado (Emergência)
- Gatilho: A temperatura atinge 130°C (Classe B) ou 155°C (Classe F).
- Ação: A corrente do motor vai a zero. O freio mecânico é acionado (se equipado). O sistema entra em estado seguro.
- Recuperação: O motor deve arrefecer abaixo de 100°C antes de ser permitido reiniciar.
Escolhendo a Classe de Isolamento Correta
Para qualquer sistema PTZ implantado onde as temperaturas ambientes atingem 50°C, recomendo vivamente isolamento Classe F1. Eis o porquê:
- A 50°C ambiente, um motor a funcionar a 85% de corrente terá um aumento de temperatura do enrolamento de cerca de 60°C–70°C.
- Temperatura total do enrolamento: 50 + 70 = 120°C.
- O limite da Classe B é 130°C. Isso deixa apenas 10°C de margem. Um dia quente sem vento, e você está na zona de desligamento.
- O limite da Classe F é 155°C. Isso lhe dá 35°C de margem. O sistema pode lidar com sobrecargas temporárias, ganho de calor solar na carcaça e perda de eficiência relacionada ao envelhecimento sem acionar a proteção.
A diferença de custo entre motores Classe B e Classe F é tipicamente de 10%–15%. Para um sistema que custa mais de 200€ para ser reparado em campo, este é um investimento óbvio.
Posso Monitorar a Temperatura do Motor em Tempo Real e o Consumo de Energia Através da Interface de Diagnóstico Web?
Quando implanto sistemas em locais remotos, preciso ver o que está acontecendo sem ter que ir até lá. Dados de temperatura e energia devem estar disponíveis da minha secretária.
Sim. Câmaras PTZ profissionais com sistemas de motor de grau industrial expõem dados térmicos e elétricos em tempo real através da sua interface de diagnóstico web. Você pode monitorizar a temperatura do enrolamento, a temperatura da placa do driver, a corrente de fase, a tensão do barramento e o stress térmico cumulativo — tudo a partir de um navegador ou através de SNMP10integração API com a sua VMS13.
 interface de diagnóstico web monitorização de energia temperatura do motor PTZ
interface de diagnóstico web monitorização de energia temperatura do motor PTZ
Que Pontos de Dados Devem Estar Disponíveis
Nem todas as interfaces web são iguais. Uma PTZ de consumo básica pode mostrar “temperatura do dispositivo” como um único número. Isso não é útil para manutenção preditiva. Eis o que uma interface de diagnóstico de grau industrial deve expor:
Parâmetros Essenciais de Telemetria
| Parâmetro | Taxa de Atualização | Finalidade |
|---|---|---|
| Temperatura do enrolamento do motor (pan) | A cada 1s | Detectar sobrecarga térmica antes do desligamento |
| Temperatura do enrolamento do motor (inclinação) | A cada 1s | O motor de inclinação geralmente funciona mais quente devido à carga gravitacional |
| Temperatura da placa do driver | A cada 5s | Monitorar a saúde da eletrônica |
| Corrente de fase (motor de pan) | A cada 1s | Detectar travamento mecânico ou sobrecarga |
| Corrente de fase (motor de inclinação) | A cada 1s | Igual ao acima |
| Tensão do barramento | A cada 5s | Detectar queda de tensão da fonte de alimentação sob carga |
| Horas térmicas cumulativas | Registro diário | Rastrear o envelhecimento do isolamento ao longo do tempo |
| Contagem de eventos térmicos | Baseado em eventos | Contar quantas vezes a redução de desempenho foi acionada |
Integração com Plataformas de Monitoramento
Para grandes implantações com 50–500+ câmeras, ninguém monitora interfaces web individuais. Os dados precisam fluir para uma plataforma central. Os métodos padrão são:
- Armadilhas e sondagem SNMP. A câmera atua como um agente SNMP. Seu NMS (como PRTG ou Zabbix) consulta OIDs de temperatura e dispara alertas quando os limites são ultrapassados.
- [API REST11. A câmera expõe um endpoint JSON (por exemplo,
/api/v1/diagnostics/thermal) que seu painel personalizado pode consultar. - [ONVIF12 eventos de análise. Alguns sistemas publicam alertas térmicos como eventos de análise ONVIF, aos quais qualquer VMS compatível pode se inscrever.
Usando Dados Térmicos para Manutenção Preditiva
O verdadeiro valor desses dados não é apenas evitar paralisações. É prever falhas antes que aconteçam. Veja como:
Se você registrar a temperatura do motor ao longo de meses, notará uma tendência. Um motor saudável em um ambiente de 50°C pode estabilizar em 105°C durante um ciclo de patrulha. Se esse número subir para 115°C ao longo de seis meses sem alteração nas condições ambientes, algo está errado. Talvez um rolamento esteja se desgastando e adicionando atrito. Talvez poeira tenha obstruído o dissipador de calor. Talvez a graxa da engrenagem tenha secado.
Ao capturar essa tendência precocemente, você pode agendar a manutenção durante uma visita planejada em vez de responder a uma falha de emergência. Para locais remotos onde uma visita técnica custa de $500 a $1.000, esse tipo de visibilidade se paga após evitar uma única chamada de serviço não planejada.
Também recomendo configurar alertas automatizados em dois níveis: um alerta de “observação” a 80% do limite de desligamento (para que você tenha dias ou semanas para planejar) e um alerta “crítico” a 90% (para que você tenha horas para agir).
Conclusão
A 50°C ambiente, a sobrevivência do motor de passo depende de escalonamento inteligente de corrente, compensação de deriva térmica, proteção de termistor embutido e monitoramento remoto. Escolha isolamento Classe F, use drivers de malha fechada e sempre exija telemetria térmica em tempo real do seu fornecedor de PTZ.
1. Saiba mais sobre as classes de isolamento de motores e os limites térmicos da Classe F (155°C) para ambientes de alta temperatura. ︎↩︎ 2. Visualize a folha de dados e os recursos do driver de motor de passo TMC2209 da Trinamic. ︎↩︎ 3. Explore o portfólio de drivers de motor de passo e tecnologias de controle de movimento da Trinamic. ︎↩︎ 4. Entenda o parâmetro TPOWERDOWN que controla o tempo de redução da corrente em marcha lenta nos drivers Trinamic. ︎↩︎ 5. Descubra como o controle de corrente adaptável à carga reduz o consumo de energia, combinando o torque à demanda. ︎↩︎ 6. Saiba como a expansão térmica e as mudanças nas propriedades do material causam desvio posicional nos motores. ︎↩︎ 7. Entenda como o feedback do encoder compensa os efeitos térmicos e melhora a precisão do motor de passo. ︎↩︎ 8. Obtenha uma visão geral dos termistores NTC e seu uso na detecção de temperatura para enrolamentos de motores. ︎↩︎ 9. Saiba mais sobre derating como uma estratégia de gerenciamento térmico para proteger componentes eletrônicos. ︎↩︎ 10. Entenda como o SNMP permite o monitoramento e gerenciamento remoto de dispositivos de rede como câmeras PTZ. ︎↩︎ 11. Saiba mais sobre APIs RESTful e como elas permitem o acesso programático a diagnósticos de dispositivos. ︎↩︎ 12. Explore o padrão ONVIF para interoperabilidade de dispositivos de segurança baseados em IP. ︎↩︎ 13. Saiba mais sobre Sistemas de Gerenciamento de Vídeo e como eles se integram à telemetria da câmera. ︎↩︎