
Ho visto motori passo-passo guastarsi sul campo dopo una sola estate. La causa principale è quasi sempre la stessa: nessun piano di gestione termica per alte temperature ambiente.
A 50°C (122°F), i motori passo-passo operano vicino al punto critico della loro classe di isolamento. Senza un'adeguata logica di controllo della corrente e un design di dissipazione del calore, la durata degli avvolgimenti del motore diminuisce rapidamente. I controller di grado industriale utilizzano lo scaling adattivo della corrente, l'ottimizzazione PWM e il bridging termico fisico per mantenere i motori in funzione in condizioni di caldo estremo.
 dissipazione del calore motore passo-passo logica controllo corrente 50 gradi
dissipazione del calore motore passo-passo logica controllo corrente 50 gradi
Di seguito, analizzerò la logica esatta e il design hardware che mantengono i motori passo-passo PTZ funzionanti in modo affidabile quando l'aria stessa è già abbastanza calda da cuocere l'elettronica. Ogni sezione risponde a una domanda specifica che sento dagli integratori di sistemi che lavorano in luoghi come il Texas, il Medio Oriente e il Sud-est asiatico.
Indice dei contenuti
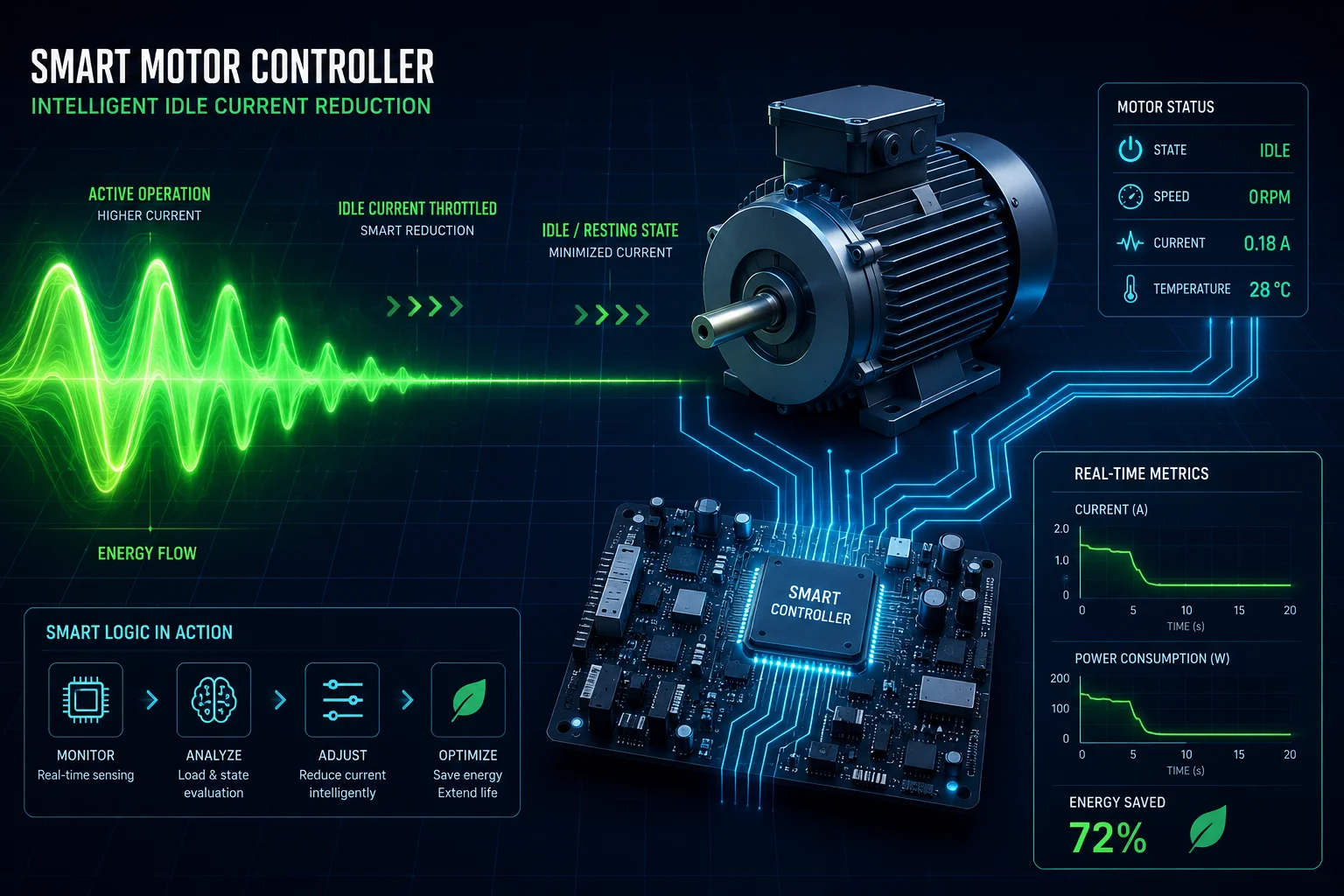
Il controller del motore utilizza lo “Smart Current Scaling” per ridurre il calore quando il PTZ è inattivo?
La maggior parte dei danni da calore che ho visto sul campo si verifica non durante il movimento, ma quando il motore è fermo. La gente dimentica che un motore passo-passo assorbe corrente di mantenimento anche quando non si muove.
Sì. I controller PTZ industriali utilizzano la riduzione automatica della corrente di inattività. Quando il motore smette di muoversi per 100–500 ms, il driver riduce la corrente al 30%–50% del valore di funzionamento. Questa singola funzione previene la causa più comune di guasto termico: l'accumulo di calore durante la fermata.
 scaling intelligente della corrente PTZ inattivo motore passo-passo
scaling intelligente della corrente PTZ inattivo motore passo-passo
Perché la corrente di inattività è il killer silenzioso
Un motore passo-passo genera calore attraverso la perdita di rame. La formula è semplice: P = I^2R. La perdita di potenza è uguale alla corrente al quadrato moltiplicata per la resistenza. Ciò significa che se si dimezza la corrente, si riduce la generazione di calore del 75%. Questa è una differenza enorme quando il motore rimane inattivo per ore tra le scansioni di pattuglia.
In una tipica implementazione di sorveglianza PTZ, la telecamera trascorre l'80%–90% del suo tempo in una posizione fissa. Durante quel periodo, il motore necessita ancora di una certa corrente per mantenere la sua posizione contro il carico del vento. Ma non necessita della piena corrente di funzionamento. Lo scaling intelligente della corrente risolve questo problema utilizzando una logica di riduzione basata su timer:
Il flusso logico di riduzione
- Il motore completa il suo ultimo movimento comandato.
- Viene avviato un timer (tipicamente 100–500 ms, configurabile).
- Se non arrivano nuovi comandi di movimento, il driver riduce la corrente di fase al livello di inattività preimpostato.
- Se arriva un nuovo comando, la corrente torna al massimo in meno di 10 ms.
Questa logica è integrata nella maggior parte dei driver stepper moderni come il TMC22092 o TMC5160 di Trinamic3. Il parametro chiave si chiama “TPOWERDOWN4” — il ritardo prima che la riduzione della corrente entri in vigore.
Impostazioni di scalatura della corrente per ambienti a 50°C
| Parametro | Impostazione standard (25°C) | Impostazione consigliata (50°C) | Ragione |
|---|---|---|---|
| Corrente di funzionamento | 100% della corrente nominale | 70%–85% della corrente nominale | Lasciare margine termico |
| Corrente di inattività | 50%–70% della corrente nominale | 30%–50% della corrente nominale | Prevenire l'accumulo di calore da fermo |
| Ritardo di spegnimento | 500ms | 100–200 ms | Riduci il tempo di inattività a piena corrente |
| Tempo di rampa della corrente | 10 ms | 10 ms | Nessuna modifica necessaria per la reattività |
Corrente adattiva al carico (sistemi a circuito chiuso)
Per i sistemi PTZ con un encoder sull'albero motore, il controller può fare qualcosa di ancora più intelligente. Misura la richiesta di coppia effettiva in tempo reale. Se il vento è calmo e la telecamera è leggera, il controller invia solo la corrente di cui il motore ha effettivamente bisogno. Questo si chiama controllo della corrente adattivo al carico5.
In un ambiente a 50°C, questo approccio può ridurre il consumo medio di energia del 30%-40% rispetto ai sistemi a circuito aperto che funzionano sempre alla massima corrente. Il compromesso è il costo: è necessario un encoder e un driver a circuito chiuso. Ma per un sistema che deve sopravvivere 10 anni su un palo alla luce solare diretta, l'investimento si ripaga da solo grazie all'evitare interventi sul campo.
Come impedisce il sistema che la “deriva termica” del motore influenzi l'accuratezza del tracciamento a metà estate?
Ho sentito integratori dire che le loro telecamere PTZ perdono lentamente l'accuratezza di puntamento man mano che la giornata si scalda. Si ricalibrano al mattino e nel pomeriggio i preset sono fuori di qualche decimo di grado. Questo è il drift termico.
Drift termico6 si verifica perché il calore modifica le dimensioni fisiche dei componenti del motore e le proprietà magnetiche del rotore. Per prevenire ciò, i sistemi PTZ industriali utilizzano correzione a circuito chiuso basata su encoder7, firmware compensato dalla temperatura e design meccanici che limitano l'espansione termica ad assi prevedibili.
 drift termico motore passo-passo precisione di tracciamento PTZ
drift termico motore passo-passo precisione di tracciamento PTZ
Cosa Causa il Drift Termico nei Motori Passo-Passo
Quando un motore passo-passo si scalda da 25°C a 90°C (cosa comune a 50°C ambientali sotto carico), diverse cose cambiano:
- La resistenza dell'avvolgimento aumenta. Il rame ha un coefficiente di temperatura positivo di circa 0,39% per °C. Un aumento di 65°C significa che la resistenza aumenta di circa il 25%. Questo riduce la coppia disponibile alla stessa tensione.
- La forza del magnete diminuisce. I magneti al neodimio perdono circa lo 0,11% della loro forza di campo per °C. A 90°C, i magneti del rotore sono circa il 7% più deboli rispetto alla temperatura ambiente.
- Espansione meccanica. L'alloggiamento in alluminio si espande. L'albero in acciaio si espande a una velocità diversa. Il precarico del cuscinetto cambia. Tutto ciò introduce un gioco minimo nella catena cinematica.
Come il firmware compensa
I moderni controller PTZ memorizzano una tabella di ricerca temperatura-offset nel firmware. Ecco come funziona il ciclo di compensazione:
- Un termistore sul corpo del motore segnala la temperatura ogni 500 ms.
- Il firmware cerca l'offset posizionale previsto per quella temperatura.
- Il controller applica un fattore di correzione a tutte le posizioni preimpostate.
- Se il sistema dispone di un encoder, controlla anche l'angolo effettivo dell'albero rispetto all'angolo comandato.
Scelte di progettazione meccanica che riducono la deriva
L'approccio migliore è minimizzare la deriva a livello hardware in modo che il firmware abbia meno lavoro da fare:
- Materiali con espansione termica abbinata. Utilizzare ingranaggi in acciaio con alberi in acciaio, non assemblaggi misti alluminio-acciaio.
- Cuscinetti precaricati. I cuscinetti a contatto angolare caricati a molla mantengono un gioco costante in un ampio intervallo di temperature.
- Treni di ingranaggi corti. Ogni ingranaggio è una fonte di gioco che peggiora con il calore. Meno ingranaggi significano meno errori accumulati.
Tabella del budget di deriva
| Fonte di deriva | Magnitudo a 90°C di temperatura del motore | Mitigazione |
|---|---|---|
| Variazione della resistenza di avvolgimento | Indiretto (perdita di coppia, non di posizione) | Aumento di corrente ad anello chiuso |
| Indebolimento del magnete | ~0,05° di errore di puntamento | Correzione encoder |
| Dilatazione termica dell'alloggiamento | ~0,02° per asse | Materiali abbinati |
| Aumento del gioco degli ingranaggi | ~0,1° nel caso peggiore | Ingranaggi anti-gioco precaricati |
| Deriva totale non compensata | ~0,17° | — |
| Dopo correzione firmware | <0,03° | Encoder + tabella di ricerca |
Per una telecamera con zoom 38X alla massima focale, 0,17° di deriva spostano il centro dell'immagine di diversi metri a una distanza di 500 m. È sufficiente per perdere un bersaglio tracciato. Dopo la compensazione, 0,03° mantengono il bersaglio ben all'interno dell'inquadratura.
Esiste un termistore interno sul motore per attivare uno spegnimento di sicurezza a temperature critiche?
Pongo sempre questa domanda quando valuto un nuovo fornitore di motori. Se la risposta è “no”, me ne vado. Un motore senza protezione termica in un ambiente di 50°C è un rischio di incendio.
Sì, i motori passo-passo di grado industriale progettati per l'uso esterno PTZ includono un sistema integrato Termistore NTC8 (tipicamente 10kΩ a 25°C) collegato direttamente all'avvolgimento dello statore. Quando la temperatura dell'avvolgimento raggiunge 130°C (Classe B) o 155°C (Classe F), il controller attiva una risposta graduale: prima riduzione della corrente9, poi uno spegnimento controllato se la temperatura continua a salire.
 temperatura di spegnimento di sicurezza del motore passo-passo termistore
temperatura di spegnimento di sicurezza del motore passo-passo termistore
Perché il rilevamento della temperatura esterna non è sufficiente
Alcuni sistemi più economici misurano solo la temperatura della scheda driver o la temperatura dell'aria ambiente. Questo è un problema. Il punto più caldo del sistema è sempre l'avvolgimento del motore stesso. L'avvolgimento può essere 40°C–60°C più caldo della superficie del carter del motore. Nel momento in cui il carter risulta pericolosamente caldo al tatto, l'isolamento dell'avvolgimento si sta già degradando.
Un termistore integrato si trova all'interno dello slot dello statore, a diretto contatto termico con il filo di rame. Legge la temperatura effettiva dell'avvolgimento con un ritardo termico di soli 2–3 secondi. Ciò fornisce al controller il tempo sufficiente per reagire prima che si verifichino danni.
La logica di protezione termica graduale
Un sistema ben progettato non si limita a interrompere l'alimentazione quando le cose si surriscaldano. Utilizza una risposta graduale:
Fase 1: Riduzione graduale (Zona di avviso)
- Attivazione: la temperatura dell'avvolgimento raggiunge 110°C (Classe B) o 135°C (Classe F).
- Azione: il controller riduce la corrente massima del 20%. Il motore rallenta ma continua a funzionare.
- Notifica: il sistema registra un avviso termico. Se collegato a un VMS, invia un allarme.
Fase 2: Riduzione drastica (Zona di pericolo)
- Attivazione: la temperatura continua a salire a 125°C (Classe B) o 150°C (Classe F).
- Azione: la corrente scende al 50%. Sono consentiti solo movimenti lenti ed essenziali.
- Notifica: inviato allarme critico. Il sistema raccomanda l'intervento dell'operatore.
Fase 3: Spegnimento controllato (Emergenza)
- Attivazione: la temperatura raggiunge 130°C (Classe B) o 155°C (Classe F).
- Azione: la corrente del motore va a zero. Il freno meccanico si attiva (se presente). Il sistema entra in uno stato di sicurezza.
- Recupero: il motore deve raffreddarsi al di sotto dei 100°C prima che sia consentito il riavvio.
Scelta della giusta classe di isolamento
Per qualsiasi sistema PTZ installato dove le temperature ambiente raggiungono i 50°C, consiglio vivamente isolamento di Classe F1. Ecco perché:
- A 50°C ambiente, un motore che funziona all'85% della corrente avrà un aumento di temperatura degli avvolgimenti di circa 60°C-70°C.
- Temperatura totale degli avvolgimenti: 50 + 70 = 120°C.
- Il limite della Classe B è 130°C. Ciò lascia solo 10°C di margine. Una giornata calda senza vento e sei nella zona di spegnimento.
- Il limite della Classe F è 155°C. Ciò ti dà 35°C di margine. Il sistema può gestire sovraccarichi temporanei, guadagno di calore solare sull'alloggiamento e perdita di efficienza legata all'invecchiamento senza attivare la protezione.
La differenza di costo tra motori di Classe B e Classe F è tipicamente del 10%-15%. Per un sistema che costa oltre 200€ per la manutenzione sul campo, questo è un investimento ovvio.
Posso monitorare la temperatura del motore in tempo reale e il consumo di energia tramite l'interfaccia utente diagnostica web?
Quando installo sistemi in luoghi remoti, ho bisogno di vedere cosa sta succedendo senza doverci andare. I dati di temperatura e potenza dovrebbero essere disponibili dalla mia scrivania.
Sì. Le telecamere PTZ professionali con sistemi motore di grado industriale espongono dati termici ed elettrici in tempo reale attraverso la loro interfaccia diagnostica web. È possibile monitorare la temperatura degli avvolgimenti, la temperatura della scheda driver, la corrente di fase, la tensione del bus e lo stress termico cumulativo, tutto da un browser o tramite SNMP10integrazione API con la tua VMS13.
 interfaccia diagnostica web monitoraggio temperatura motore monitoraggio potenza PTZ
interfaccia diagnostica web monitoraggio temperatura motore monitoraggio potenza PTZ
Quali punti dati dovrebbero essere disponibili
Non tutte le interfacce web sono uguali. Una PTZ consumer di base potrebbe mostrarti la “temperatura del dispositivo” come un singolo numero. Questo non è utile per la manutenzione predittiva. Ecco cosa dovrebbe esporre un'interfaccia diagnostica di grado industriale:
Parametri di telemetria essenziali
| Parametro | Frequenza di aggiornamento | Scopo |
|---|---|---|
| Temperatura avvolgimento motore (panoramica) | Ogni 1s | Rileva il sovraccarico termico prima dello spegnimento |
| Temperatura dell'avvolgimento del motore (inclinazione) | Ogni 1s | Il motore di inclinazione funziona spesso più a caldo a causa del carico gravitazionale |
| Temperatura della scheda driver | Ogni 5 secondi | Monitora lo stato di salute dell'elettronica |
| Corrente di fase (motore di brandeggio) | Ogni 1s | Rileva blocco meccanico o sovraccarico |
| Corrente di fase (motore di inclinazione) | Ogni 1s | Come sopra |
| Tensione del bus | Ogni 5 secondi | Rileva l'abbassamento dell'alimentazione sotto carico |
| Ore termiche cumulative | Registro giornaliero | Traccia l'invecchiamento dell'isolamento nel tempo |
| Conteggio eventi termici | Basato su eventi | Conta quante volte è stato attivato il derating |
Integrazione con Piattaforme di Monitoraggio
Per grandi implementazioni con 50-500+ telecamere, nessuno guarda le singole interfacce web. I dati devono confluire in una piattaforma centrale. I metodi standard sono:
- Trappole SNMP e polling. La telecamera funge da agente SNMP. Il tuo NMS (come PRTG o Zabbix) interroga gli OID di temperatura e attiva avvisi quando le soglie vengono superate.
- [API REST11. La telecamera espone un endpoint JSON (ad esempio,
/api/v1/diagnostics/thermal) che il tuo dashboard personalizzato può interrogare. - [ONVIF12 eventi di analisi. Alcuni sistemi pubblicano avvisi termici come eventi di analisi ONVIF, a cui qualsiasi VMS compatibile può iscriversi.
Utilizzo dei dati termici per la manutenzione predittiva
Il vero valore di questi dati non è solo evitare arresti imprevisti. Si tratta di prevedere i guasti prima che si verifichino. Ecco come:
Se registri la temperatura del motore per mesi, noterai una tendenza. Un motore sano in un ambiente a 50°C potrebbe stabilizzarsi a 105°C durante un ciclo di pattugliamento. Se quel numero sale a 115°C in sei mesi senza alcun cambiamento nelle condizioni ambientali, qualcosa non va. Forse un cuscinetto si sta usurando e aggiunge attrito. Forse la polvere ha ostruito il dissipatore di calore. Forse il grasso dell'ingranaggio si è seccato.
Cogliendo questa tendenza in anticipo, puoi programmare la manutenzione durante una visita pianificata invece di rispondere a un guasto di emergenza. Per siti remoti dove un intervento tecnico costa $500–$1.000, questo tipo di visibilità si ripaga dopo aver prevenuto una singola chiamata di servizio non pianificata.
Raccomando inoltre di impostare avvisi automatici su due livelli: un avviso di “monitoraggio” all“80% della soglia di arresto (in modo da avere giorni o settimane per pianificare) e un avviso ”critico" al 90% (in modo da avere ore per agire).
Conclusione
A 50°C ambientali, la sopravvivenza del motore passo-passo dipende da un'intelligente scalatura della corrente, dalla compensazione della deriva termica, dalla protezione del termistore integrato e dal monitoraggio remoto. Scegli l'isolamento di Classe F, utilizza driver a circuito chiuso e richiedi sempre telemetria termica in tempo reale dal tuo fornitore PTZ.
1. Informati sulle classi di isolamento dei motori e sui limiti termici della Classe F (155°C) per ambienti ad alta temperatura. ︎↩︎ 2. Visualizza la scheda tecnica e le caratteristiche del driver per motori passo-passo TMC2209 di Trinamic. ︎↩︎ 3. Esplora il portafoglio di driver per motori passo-passo e tecnologie di controllo del movimento di Trinamic. ︎↩︎ 4. Comprendi il parametro TPOWERDOWN che controlla la temporizzazione della riduzione della corrente di inattività nei driver Trinamic. ︎↩︎ 5. Scopri come il controllo della corrente adattivo al carico riduce il consumo energetico abbinando la coppia alla domanda. ︎↩︎ 6. Scopri come l'espansione termica e le variazioni delle proprietà dei materiali causano deriva posizionale nei motori. ︎↩︎ 7. Comprendi come il feedback dell'encoder compensa gli effetti termici e migliora l'accuratezza dei motori passo-passo. ︎↩︎ 8. Ottieni una panoramica dei termistori NTC e del loro utilizzo nel rilevamento della temperatura per gli avvolgimenti dei motori. ︎↩︎ 9. Scopri il derating come strategia di gestione termica per proteggere i componenti elettronici. ︎↩︎ 10. Comprendi come SNMP abilita il monitoraggio e la gestione remota dei dispositivi di rete come le telecamere PTZ. ︎↩︎ 11. Scopri le API RESTful e come abilitano l'accesso programmatico alla diagnostica dei dispositivi. ︎↩︎ 12. Esplora lo standard ONVIF per l'interoperabilità dei dispositivi di sicurezza basati su IP. ︎↩︎ 13. Scopri i sistemi di gestione video e come si integrano con la telemetria delle telecamere. ︎↩︎