
Ich habe gesehen, wie Schrittmotoren nach nur einem Sommer im Feld ausgefallen sind. Die Hauptursache ist fast immer dieselbe: kein Wärmemanagement für hohe Umgebungstemperaturen.
Bei 50°C (122°F) arbeiten Schrittmotoren nahe am kritischen Punkt ihrer Isolationsklasse. Ohne eine angemessene Stromregelungslogik und ein geeignetes Wärmeableitungsdesign sinkt die Lebensdauer der Motorwicklungen schnell. Industrielle Steuerungen verwenden adaptive Stromskalierung, PWM-Optimierung und physische thermische Überbrückung, um Motoren bei extremer Hitze am Laufen zu halten.
 Schrittmotor Wärmeableitung Stromregelungslogik 50 Grad
Schrittmotor Wärmeableitung Stromregelungslogik 50 Grad
Im Folgenden werde ich die genaue Logik und das Hardware-Design erläutern, die PTZ-Schrittmotoren zuverlässig laufen lassen, wenn die Luft selbst bereits heiß genug ist, um Elektronik zu garen. Jeder Abschnitt beantwortet eine spezifische Frage, die ich von Systemintegratoren höre, die in Orten wie Texas, dem Nahen Osten und Südostasien arbeiten.
Inhaltsübersicht
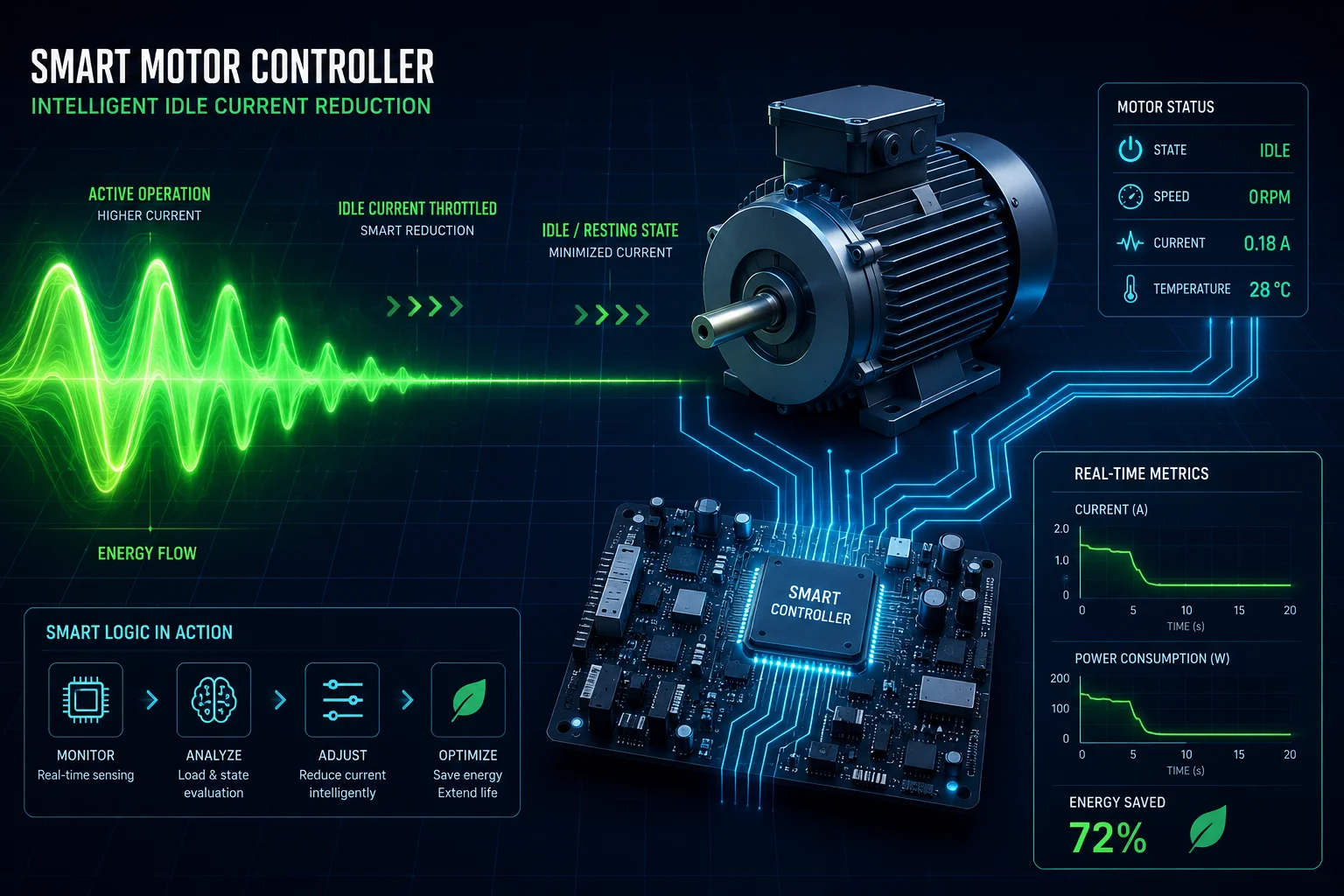
Verwendet die Motorsteuerung “Smart Current Scaling”, um die Wärme zu reduzieren, wenn sich der PTZ im Leerlauf befindet?
Der meiste Hitzeschaden, den ich im Feld gesehen habe, tritt nicht während der Bewegung auf, sondern wenn der Motor stillsteht. Man vergisst, dass ein Schrittmotor auch im Stillstand Strom zieht.
Ja. Industrielle PTZ-Steuerungen verwenden eine automatische Leerstromreduzierung. Wenn sich der Motor 100–500 ms nicht bewegt, reduziert der Treiber den Strom auf 30 %–50 % des Betriebswertes. Diese einzelne Funktion verhindert die häufigste Ursache für thermisches Versagen: Wärmeaufbau im Stillstand.
 Smart Current Scaling PTZ Leerlauf Schrittmotor
Smart Current Scaling PTZ Leerlauf Schrittmotor
Warum Leerlaufstrom der stille Killer ist
Ein Schrittmotor erzeugt Wärme durch Kupferverluste. Die Formel ist einfach: P = I^2R. Leistungsverlust ist gleich Strom zum Quadrat mal Widerstand. Das bedeutet, wenn Sie den Strom halbieren, reduzieren Sie die Wärmeentwicklung um 75 %. Das ist ein enormer Unterschied, wenn der Motor stundenlang im Leerlauf steht, zwischen Patrouillen-Scans.
In einer typischen PTZ-Überwachungsanwendung verbringt die Kamera 80 %–90 % ihrer Zeit in einer festen Position. Während dieser Zeit benötigt der Motor immer noch etwas Strom, um seine Position gegen Windlast zu halten. Aber er benötigt keinen vollen Betriebsstrom. Smart Current Scaling löst dieses Problem durch eine zeitgesteuerte Schritt-Down-Logik:
Die Schritt-Down-Logik
- Motor schließt seine letzte befohlene Bewegung ab.
- Ein Timer startet (typischerweise 100–500 ms, konfigurierbar).
- Wenn kein neuer Bewegungsbefehl eintrifft, reduziert der Treiber den Phasenstrom auf das voreingestellte Leerlaufniveau.
- Wenn ein neuer Befehl eintrifft, wird der Strom in weniger als 10 ms wieder auf volle Leistung hochgefahren.
Diese Logik ist in die meisten modernen Schrittmotortreiber wie den TMC22092 oder TMC5160 von Trinamic3. integriert. Der Schlüsselparameter heißt “TPOWERDOWN4” – die Verzögerung, bevor die Stromreduzierung einsetzt.
Stromeinstellungen für Umgebungen mit 50°C
| Parameter | Standardeinstellung (25°C) | Empfohlene Einstellung (50°C) | Grund |
|---|---|---|---|
| Betriebsstrom | 100% des Nennstroms | 70%–85% des Nennstroms | Thermischen Spielraum lassen |
| Ruhestrom | 50%–70% des Nennstroms | 30%–50% des Nennstroms | Stillstands-Wärmeentwicklung verhindern |
| Power-Down-Verzögerung | 500ms | 100–200ms | Leerlaufzeit bei vollem Strom reduzieren |
| Stromanstiegszeit | 10ms | 10ms | Keine Änderung für Reaktionsfähigkeit erforderlich |
Lastadaptive Stromregelung (Closed-Loop-Systeme)
Bei PTZ-Systemen mit einem Encoder auf der Motorwelle kann die Steuerung etwas intelligenteres tun. Sie misst die tatsächliche Drehmomentanforderung in Echtzeit. Wenn der Wind ruhig ist und die Kamera leicht ist, sendet die Steuerung nur den Strom, den der Motor tatsächlich benötigt. Dies wird als lastadaptive Stromregelung5.
In einer Umgebung von 50°C kann dieser Ansatz den durchschnittlichen Stromverbrauch um 30–40 % im Vergleich zu Open-Loop-Systemen reduzieren, die immer mit maximalem Strom laufen. Der Nachteil sind die Kosten – Sie benötigen einen Encoder und einen Closed-Loop-Treiber. Aber für ein System, das 10 Jahre lang auf einem Mast in direkter Sonneneinstrahlung überdauern muss, zahlt sich die Investition durch vermiedene Serviceeinsätze aus.
Wie verhindert das System, dass die “thermische Drift” des Motors die Nachführgenauigkeit im Hochsommer beeinträchtigt?
Ich habe Integratoren sagen hören, dass ihre PTZ-Kameras im Laufe des Tages bei Erwärmung langsam die Zeigegenauigkeit verlieren. Sie kalibrieren am Morgen neu, und bis 14 Uhr sind die Voreinstellungen um einige Zehntel Grad abweichend. Das ist thermische Drift.
Thermische Drift6 tritt auf, weil Wärme die physikalischen Abmessungen von Motorkomponenten und die magnetischen Eigenschaften des Rotors verändert. Um dies zu verhindern, verwenden industrielle PTZ-Systeme Encoder-basierte Closed-Loop-Korrektur7, temperaturkompensierte Firmware und mechanische Konstruktionen, die die thermische Ausdehnung auf vorhersehbare Achsen beschränken.
 thermische Drift Schrittmotor Nachführgenauigkeit PTZ
thermische Drift Schrittmotor Nachführgenauigkeit PTZ
Was verursacht thermische Drift bei Schrittmotoren?
Wenn sich ein Schrittmotor von 25°C auf 90°C erwärmt (was bei 50°C Umgebungstemperatur unter Last üblich ist), ändern sich mehrere Dinge:
- Der Wicklungswiderstand steigt. Kupfer hat einen positiven Temperaturkoeffizienten von etwa 0,39 % pro °C. Ein Anstieg um 65°C bedeutet, dass der Widerstand um etwa 25 % steigt. Dies reduziert das verfügbare Drehmoment bei gleicher Spannung.
- Die Magnetstärke nimmt ab. Neodym-Magnete verlieren etwa 0,11 % ihrer Feldstärke pro °C. Bei 90°C sind die Rotormagnete etwa 7 % schwächer als bei Raumtemperatur.
- Mechanische Ausdehnung. Das Aluminiumgehäuse dehnt sich aus. Die Stahlwelle dehnt sich mit einer anderen Geschwindigkeit aus. Die Lager-Vorspannung ändert sich. All dies führt zu Mikrorückspielen im Getriebe.
Wie Firmware kompensiert
Moderne PTZ-Controller speichern eine Temperatur-gegen-Offset-Lookup-Tabelle in der Firmware. So funktioniert die Kompensationsschleife:
- Ein Thermistor am Motorkörper meldet alle 500 ms die Temperatur.
- Die Firmware sucht den erwarteten Positions-Offset für diese Temperatur nach.
- Der Controller wendet einen Korrekturfaktor auf alle voreingestellten Positionen an.
- Wenn das System einen Encoder hat, prüft es auch den tatsächlichen Wellenwinkel gegen den befohlenen Winkel.
Mechanische Designentscheidungen, die Drift reduzieren
Der beste Ansatz ist, die Drift auf Hardware-Ebene zu minimieren, damit die Firmware weniger Arbeit hat:
- Angepasste Materialien für thermische Ausdehnung. Verwenden Sie Stahlzahnräder mit Stahlwellen, keine gemischten Aluminium-Stahl-Baugruppen.
- Vorgespannten Lager. Federbelastete Schrägkugellager halten das Spiel über einen weiten Temperaturbereich konstant.
- Kurze Getriebe. Jede Zahnradpaarung ist eine Quelle für Spiel, das sich mit Hitze verschlimmert. Weniger Zahnräder bedeuten weniger akkumulierte Fehler.
Drift-Budget-Tabelle
| Quelle der Drift | Größe bei 90°C Motortemperatur | Minderung |
|---|---|---|
| Wicklungswiderstandsänderung | Indirekt (Drehmomentverlust, nicht Position) | Geschlossene Stromregelung |
| Magnetabschwächung | ~0,05° Zeigefehler | Encoder-Korrektur |
| Gehäuse-Wärmeausdehnung | ~0,02° pro Achse | Abgestimmte Materialien |
| Zahnflankenspiel-Erhöhung | ~0,1° im schlimmsten Fall | Vorgespannten Zahnräder gegen Rückspiel |
| Gesamte unkompensierte Drift | ~0,17° | — |
| Nach Firmware-Korrektur | <0,03° | Encoder + Nachschlagetabelle |
Bei einer 38-fach-Zoomkamera im maximalen Telebereich bewegt eine Drift von 0,17° das Bildzentrum um mehrere Meter bei einer Reichweite von 500 m. Das reicht aus, um ein verfolgtes Ziel zu verlieren. Nach der Kompensation hält 0,03° das Ziel gut im Bild.
Befindet sich ein interner Thermistor am Motor, um bei kritischen Temperaturen eine Sicherheitsabschaltung auszulösen?
Diese Frage stelle ich immer, wenn ich einen neuen Motorenlieferanten bewerte. Wenn die Antwort “nein” lautet, gehe ich weg. Ein Motor ohne thermischen Schutz in einer 50°C-Umgebung ist eine Brandgefahr.
Ja, industrielle Schrittmotoren für den Außenbereich mit PTZ-Funktion verfügen über eine integrierte NTC-Thermistor8 (typischerweise 10 kΩ bei 25 °C) direkt in die Statorwicklung eingebunden. Wenn die Wicklungstemperatur 130 °C (Klasse B) oder 155 °C (Klasse F) erreicht, löst der Controller eine gestaffelte Reaktion aus: zuerst Strom-Leistungsminderung9, dann eine kontrollierte Abschaltung, wenn die Temperatur weiter steigt.
 Thermistor-Schutzabschaltungstemperatur für Schrittmotoren
Thermistor-Schutzabschaltungstemperatur für Schrittmotoren
Warum externe Temperaturmessung nicht ausreicht
Einige billigere Systeme messen nur die Temperatur der Treiberplatine oder die Umgebungstemperatur. Das ist ein Problem. Der heißeste Punkt im System ist immer die Motorwicklung selbst. Die Wicklung kann 40 °C–60 °C heißer sein als die Oberfläche des Motorgehäuses. Wenn sich das Gehäuse gefährlich heiß anfühlt, ist die Wicklungsisolierung bereits geschädigt.
Ein integrierter Thermistor sitzt im Statorschlitz und steht in direktem thermischem Kontakt mit dem Kupferdraht. Er misst die tatsächliche Wicklungstemperatur mit einer thermischen Verzögerung von nur 2–3 Sekunden. Dies gibt dem Controller genügend Zeit zu reagieren, bevor Schäden auftreten.
Die gestaffelte thermische Schutzlogik
Ein gut konzipiertes System schaltet nicht einfach den Strom ab, wenn es heiß wird. Es verwendet eine abgestufte Reaktion:
Stufe 1: Sanfte Leistungsminderung (Warnzone)
- Auslöser: Wicklungstemperatur erreicht 110 °C (Klasse B) oder 135 °C (Klasse F).
- Aktion: Controller reduziert den maximalen Strom um 20 %. Der Motor verlangsamt sich, arbeitet aber weiter.
- Benachrichtigung: Das System protokolliert eine thermische Warnung. Wenn es mit einem VMS verbunden ist, sendet es eine Benachrichtigung.
Stufe 2: Starke Leistungsminderung (Gefahrenzone)
- Auslöser: Temperatur steigt weiter auf 125 °C (Klasse B) oder 150 °C (Klasse F).
- Aktion: Strom sinkt auf 50 %. Nur langsame, wesentliche Bewegungen sind zulässig.
- Benachrichtigung: Kritischer Alarm wird gesendet. Das System empfiehlt ein Eingreifen des Bedieners.
Stufe 3: Kontrollierte Abschaltung (Notfall)
- Auslöser: Temperatur erreicht 130 °C (Klasse B) oder 155 °C (Klasse F).
- Aktion: Motorstrom geht auf Null. Mechanische Bremse zieht an (falls vorhanden). Das System geht in einen sicheren Zustand.
- Wiederherstellung: Der Motor muss unter 100 °C abkühlen, bevor ein Neustart zulässig ist.
Auswahl der richtigen Isolationsklasse
Für jedes PTZ-System, das dort eingesetzt wird, wo die Umgebungstemperaturen 50 °C erreichen, empfehle ich dringend Isolationsklasse F1. Hier ist der Grund:
- Bei 50 °C Umgebungstemperatur hat ein Motor, der mit 85% Strom läuft, einen Wicklungstemperaturanstieg von etwa 60 °C–70 °C.
- Gesamte Wicklungstemperatur: 50 + 70 = 120 °C.
- Die Grenze der Klasse B beträgt 130 °C. Das lässt nur 10 °C Spielraum. Ein heißer Tag ohne Wind und Sie sind im Abschaltbereich.
- Die Grenze der Klasse F beträgt 155 °C. Das gibt Ihnen 35 °C Spielraum. Das System kann vorübergehende Überlastungen, Sonneneinstrahlung auf das Gehäuse und alterungsbedingte Effizienzverluste bewältigen, ohne den Schutz auszulösen.
Der Preisunterschied zwischen Motoren der Klasse B und Klasse F beträgt typischerweise 10 %–15 %. Für ein System, dessen Wartung vor Ort 200 €+ kostet, ist dies eine offensichtliche Investition.
Kann ich die Echtzeit-Motortemperatur und den Stromverbrauch über die Web-Diagnose-Benutzeroberfläche überwachen?
Wenn ich Systeme an abgelegenen Standorten einsetze, muss ich sehen, was passiert, ohne dorthin fahren zu müssen. Temperatur- und Leistungsdaten sollten von meinem Schreibtisch aus verfügbar sein.
Ja. Professionelle PTZ-Kameras mit industriellen Motorsystemen geben Echtzeit-Thermo- und elektrische Daten über ihre Web-Diagnoseschnittstelle aus. Sie können Wicklungstemperatur, Treiberplatinentemperatur, Phasenstrom, Bussspannung und kumulative thermische Belastung überwachen – alles von einem Browser oder über SNMP10/API-Integration mit Ihrer VMS13.
 Web-Diagnose-UI Motortemperatur Leistungsüberwachung PTZ
Web-Diagnose-UI Motortemperatur Leistungsüberwachung PTZ
Welche Datenpunkte sollten verfügbar sein?
Nicht alle Web-Oberflächen sind gleich. Eine einfache Consumer-PTZ zeigt Ihnen möglicherweise die “Gerätetemperatur” als einzelne Zahl an. Das ist für die vorausschauende Wartung nicht nützlich. Hier ist, was eine industrielle Diagnose-UI anzeigen sollte:
Wesentliche Telemetrieparameter
| Parameter | Aktualisierungsrate | Zweck |
|---|---|---|
| Motorwickeltemperatur (Schwenken) | Alle 1 Sek. | Thermische Überlastung vor Abschaltung erkennen |
| Motorwicklungstemperatur (Neigung) | Alle 1 Sek. | Neigungsmotor läuft aufgrund der Schwerkraftlast oft heißer |
| Treiberplatine Temperatur | Alle 5s | Überwachung der Elektronikgesundheit |
| Phasenstrom (Schwenkmotor) | Alle 1 Sek. | Mechanisches Klemmen oder Überlastung erkennen |
| Phasenstrom (Neigungsmotor) | Alle 1 Sek. | Wie oben |
| Bussspannung | Alle 5s | Stromversorgungseinbrüche unter Last erkennen |
| Kumulierte thermische Stunden | Tägliches Protokoll | Verfolgen der Isolationsalterung über die Zeit |
| Anzahl thermischer Ereignisse | Ereignisbasiert | Zählen, wie oft eine Leistungsreduzierung ausgelöst wurde |
Integration mit Überwachungsplattformen
Für große Bereitstellungen mit 50–500+ Kameras beobachtet niemand einzelne Web-Benutzeroberflächen. Die Daten müssen in eine zentrale Plattform fließen. Die Standardmethoden sind:
- SNMP-Traps und Abfragen. Die Kamera fungiert als SNMP-Agent. Ihr NMS (wie PRTG oder Zabbix) fragt Temperatur-OIDs ab und löst Alarme aus, wenn Schwellenwerte überschritten werden.
- [REST-API11. Die Kamera stellt einen JSON-Endpunkt bereit (z. B.,
/api/v1/diagnostics/thermal), den Ihr benutzerdefiniertes Dashboard abfragen kann. - [ONVIF12 Analyseereignisse. Einige Systeme veröffentlichen thermische Alarme als ONVIF-Analyseereignisse, die jedes kompatible VMS abonnieren kann.
Thermische Daten für vorausschauende Wartung nutzen
Der wirkliche Wert dieser Daten besteht nicht nur darin, Ausfälle zu vermeiden. Es geht darum, Fehler vorherzusagen, bevor sie auftreten. Hier ist, wie:
Wenn Sie die Motortemperatur über Monate hinweg protokollieren, werden Sie einen Trend feststellen. Ein gesunder Motor in einer 50°C-Umgebung stabilisiert sich möglicherweise bei 105°C während eines Patrouillenzyklus. Wenn diese Zahl über sechs Monate auf 115°C ansteigt, ohne dass sich die Umgebungsbedingungen ändern, stimmt etwas nicht. Vielleicht verschleißt ein Lager und verursacht Reibung. Vielleicht hat Staub den Kühlkörper verstopft. Vielleicht ist das Getriebefett ausgetrocknet.
Indem Sie diesen Trend frühzeitig erkennen, können Sie die Wartung während eines geplanten Besuchs planen, anstatt auf einen Notfallausfall zu reagieren. Für abgelegene Standorte, an denen eine Anfahrt 500–1.000 € kostet, zahlt sich diese Art von Transparenz nach der Verhinderung eines einzigen ungeplanten Serviceeinsatzes aus.
Ich empfehle außerdem, automatisierte Alarme auf zwei Ebenen einzurichten: einen “Überwachungs”-Alarm bei 80 % des Abschaltschwellenwerts (damit Sie Tage oder Wochen Zeit zum Planen haben) und einen “kritischen” Alarm bei 90 % (damit Sie Stunden Zeit zum Handeln haben).
Schlussfolgerung
Bei 50°C Umgebungstemperatur hängt die Lebensdauer von Schrittmotoren von intelligenter Stromskalierung, Kompensation von thermischer Drift, integriertem Thermistor-Schutz und Fernüberwachung ab. Wählen Sie Isolationsklasse F, verwenden Sie Closed-Loop-Treiber und fordern Sie immer Echtzeit-Thermotelemeterie von Ihrem PTZ-Lieferanten an.
1. Erfahren Sie mehr über Motorklassen und die thermischen Grenzwerte der Klasse F (155 °C) für Umgebungen mit hohen Temperaturen. ︎↩︎ 2. Sehen Sie sich das Datenblatt und die Funktionen des TMC2209-Schrittmotortreibers von Trinamic an. ︎↩︎ 3. Entdecken Sie das Portfolio von Trinamic an Schrittmotortreibern und Motion-Control-Technologien. ︎↩︎ 4. Verstehen Sie den TPOWERDOWN-Parameter, der die Timing-Reduzierung des Leerlaufstroms in Trinamic-Treibern steuert. ︎↩︎ 5. Erfahren Sie, wie die lastadaptive Stromregelung den Stromverbrauch reduziert, indem sie das Drehmoment an die Nachfrage anpasst. ︎↩︎ 6. Erfahren Sie, wie thermische Ausdehnung und Änderungen der Materialeigenschaften zu Positionsdrift bei Motoren führen. ︎↩︎ 7. Verstehen Sie, wie die Rückmeldung des Encoders thermische Effekte kompensiert und die Genauigkeit von Schrittmotoren verbessert. ︎↩︎ 8. Erhalten Sie einen Überblick über NTC-Thermistoren und ihre Verwendung zur Temperaturerfassung von Motorwicklungen. ︎↩︎ 9. Erfahren Sie mehr über Derating als Strategie für das Wärmemanagement zum Schutz elektronischer Komponenten. ︎↩︎ 10. Verstehen Sie, wie SNMP die Fernüberwachung und -verwaltung von Netzwerkgeräten wie PTZ-Kameras ermöglicht. ︎↩︎ 11. Erfahren Sie mehr über RESTful APIs und wie sie den programmatischen Zugriff auf Gerätediagnosen ermöglichen. ︎↩︎ 12. Erkunden Sie den ONVIF-Standard für die Interoperabilität von IP-basierten Sicherheitsgeräten. ︎↩︎ 13. Erfahren Sie mehr über Video Management Systeme und wie sie mit Kameratelemetrie integriert werden. ︎↩︎