
He visto fallar motores paso a paso en el campo después de un solo verano. La causa raíz es casi siempre la misma: no hay un plan de gestión térmica para altas temperaturas ambiente.
A 50 °C (122 °F), los motores paso a paso operan cerca del punto crítico de su clase de aislamiento. Sin una lógica de control de corriente y un diseño de disipación de calor adecuados, la vida útil del bobinado del motor se reduce rápidamente. Los controladores de grado industrial utilizan escalado de corriente adaptativo, optimización PWM y puente térmico físico para mantener los motores funcionando en calor extremo.
 disipación de calor del motor paso a paso lógica de control de corriente 50 grados
disipación de calor del motor paso a paso lógica de control de corriente 50 grados
A continuación, desglosaré la lógica exacta y el diseño de hardware que mantienen los motores paso a paso PTZ funcionando de manera confiable cuando el aire en sí ya está lo suficientemente caliente como para cocinar componentes electrónicos. Cada sección responde a una pregunta específica que escucho de los integradores de sistemas que trabajan en lugares como Texas, Medio Oriente y el Sudeste Asiático.
Índice
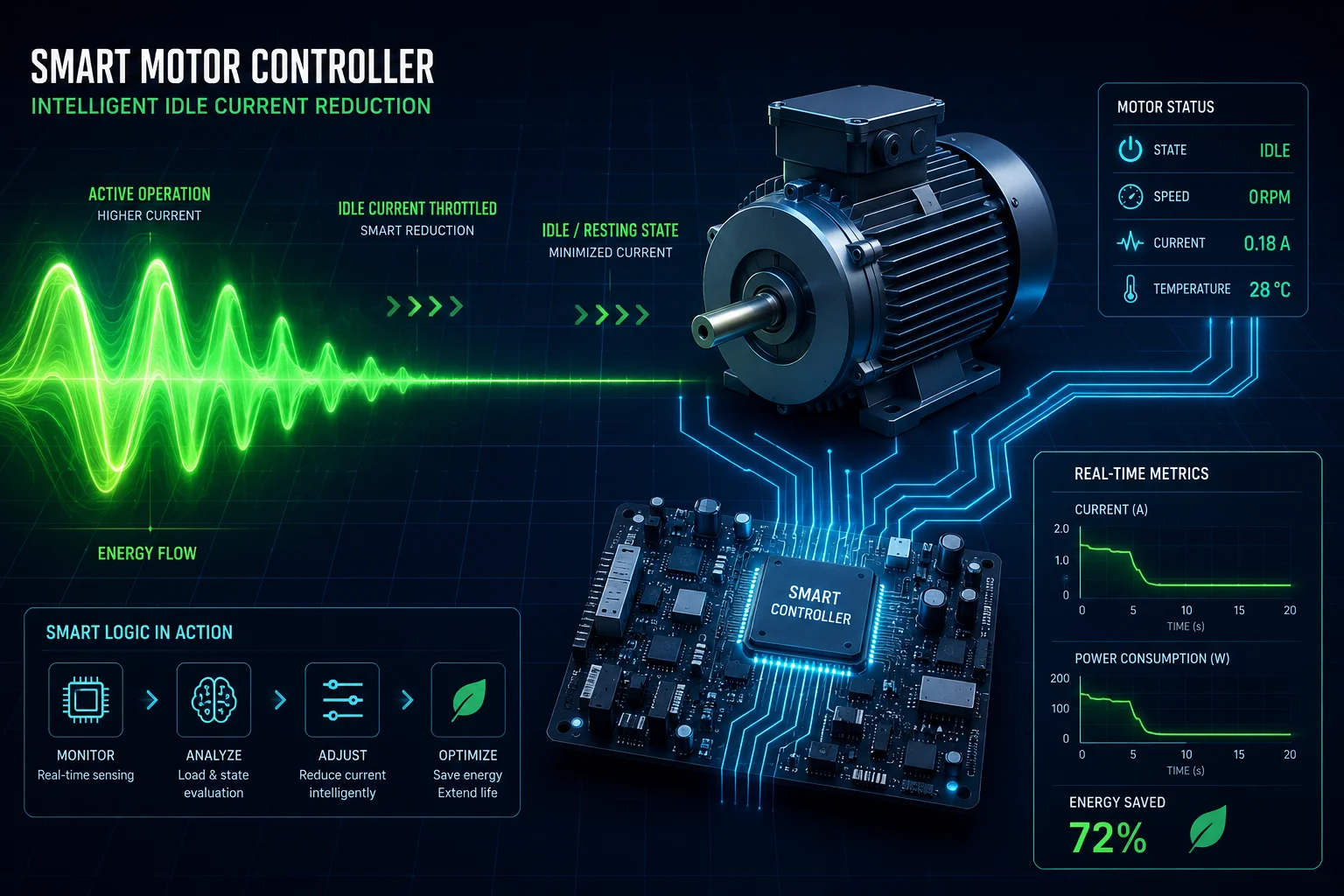
¿Utiliza el controlador del motor “escalado de corriente inteligente” para reducir el calor cuando el PTZ está inactivo?
La mayor parte del daño por calor que he visto en el campo ocurre no durante el movimiento, sino cuando el motor está quieto. La gente olvida que un motor paso a paso consume corriente de sujeción incluso cuando no se está moviendo.
Sí. Los controladores PTZ industriales utilizan reducción automática de corriente en vacío. Cuando el motor deja de moverse durante 100-500 ms, el controlador reduce la corriente al 30-50% del valor de funcionamiento. Esta única característica evita la causa más común de falla térmica: la acumulación de calor durante la inactividad.
 escalado de corriente inteligente PTZ inactivo motor paso a paso
escalado de corriente inteligente PTZ inactivo motor paso a paso
Por qué la corriente en vacío es el asesino silencioso
Un motor paso a paso genera calor a través de la pérdida de cobre. La fórmula es simple: P = I^2R. La pérdida de potencia es igual a la corriente al cuadrado por la resistencia. Esto significa que si reduce la corriente a la mitad, reduce la generación de calor en un 75%. Esa es una diferencia masiva cuando el motor permanece inactivo durante horas entre escaneos de patrulla.
En una implementación típica de vigilancia PTZ, la cámara pasa el 80-90% de su tiempo en una posición fija. Durante ese tiempo, el motor aún necesita algo de corriente para mantener su posición contra la carga del viento. Pero no necesita la corriente de funcionamiento completa. El escalado de corriente inteligente resuelve esto utilizando una lógica de reducción basada en temporizador:
El flujo de lógica de reducción
- El motor completa su último movimiento comandado.
- Se inicia un temporizador (típicamente 100-500 ms, configurable).
- Si no llega ningún comando de movimiento nuevo, el controlador reduce la corriente de fase al nivel de inactividad preestablecido.
- Si llega un comando nuevo, la corriente vuelve a subir al máximo en menos de 10 ms.
Esta lógica está integrada en la mayoría de los controladores de motor paso a paso modernos como el TMC22092 o el TMC5160 de Trinamic3. El parámetro clave se llama “TPOWERDOWN4” — el retraso antes de que la reducción de corriente se active.
Ajustes de escala de corriente para entornos de 50 °C
| Parámetro | Ajuste estándar (25 °C) | Ajuste recomendado (50 °C) | Razón |
|---|---|---|---|
| Corriente de funcionamiento | 100% de nominal | 70%–85% de nominal | Dejar margen térmico |
| Corriente en reposo | 50%–70% de nominal | 30%–50% de nominal | Evitar la acumulación de calor en reposo |
| Retraso de apagado | 500ms | 100–200 ms | Reducir el tiempo de inactividad con corriente completa |
| Tiempo de rampa de corriente | 10ms | 10ms | No se necesita ningún cambio para la capacidad de respuesta |
Corriente adaptativa a la carga (Sistemas de bucle cerrado)
Para sistemas PTZ con un codificador en el eje del motor, el controlador puede hacer algo aún más inteligente. Mide la demanda de par real en tiempo real. Si el viento está en calma y la cámara es ligera, el controlador solo envía la corriente que el motor necesita realmente. Esto se llama control de corriente adaptativo a la carga5.
En un entorno de 50 °C, este enfoque puede reducir el consumo de energía promedio en un 30 % - 40 % en comparación con los sistemas de bucle abierto que siempre funcionan a máxima corriente. La desventaja es el costo: necesita un codificador y un controlador de bucle cerrado. Pero para un sistema que debe sobrevivir 10 años en un poste bajo la luz solar directa, la inversión se amortiza con las visitas evitadas al sitio.
¿Cómo evita el sistema que la “deriva térmica” del motor afecte la precisión del seguimiento a mitad del verano?
He escuchado a integradores decirme que sus cámaras PTZ pierden lentamente la precisión de apuntado a medida que el día se calienta. Realizan una recalibración por la mañana y, a las 2 p. m., los preajustes se desvían unas décimas de grado. Eso es deriva térmica.
Deriva térmica6 ocurre porque el calor cambia las dimensiones físicas de los componentes del motor y las propiedades magnéticas del rotor. Para evitar esto, los sistemas PTZ industriales utilizan corrección de bucle cerrado basada en codificador7, firmware con compensación de temperatura y diseños mecánicos que restringen la expansión térmica a ejes predecibles.
 deriva térmica motor paso a paso precisión de seguimiento PTZ
deriva térmica motor paso a paso precisión de seguimiento PTZ
¿Qué Causa la Deriva Térmica en los Motores Paso a Paso?
Cuando un motor paso a paso se calienta de 25 °C a 90 °C (lo cual es común a 50 °C ambiente bajo carga), varias cosas cambian:
- La resistencia del bobinado aumenta. El cobre tiene un coeficiente de temperatura positivo de aproximadamente 0.39 % por °C. Un aumento de 65 °C significa que la resistencia aumenta aproximadamente un 25 %. Esto reduce el par disponible con el mismo voltaje.
- La fuerza del imán disminuye. Los imanes de neodimio pierden aproximadamente el 0.11 % de su fuerza de campo por °C. A 90 °C, los imanes del rotor son aproximadamente un 7 % más débiles que a temperatura ambiente.
- Expansión mecánica. La carcasa de aluminio se expande. El eje de acero se expande a una velocidad diferente. La precarga del rodamiento cambia. Todo esto introduce un microjuego en la transmisión.
Cómo el Firmware Compensa
Los controladores PTZ modernos almacenan una tabla de consulta de temperatura frente a desplazamiento en el firmware. Así es como funciona el bucle de compensación:
- Un termistor en el cuerpo del motor informa la temperatura cada 500 ms.
- El firmware busca el desplazamiento posicional esperado para esa temperatura.
- El controlador aplica un factor de corrección a todas las posiciones preestablecidas.
- Si el sistema tiene un codificador, también verifica el ángulo real del eje con el ángulo comandado.
Opciones de Diseño Mecánico que Reducen la Deriva
El mejor enfoque es minimizar la deriva a nivel de hardware para que el firmware tenga menos trabajo que hacer:
- Materiales de expansión térmica coincidentes. Use engranajes de acero con ejes de acero, no ensamblajes mixtos de aluminio y acero.
- Rodamientos precargados. Los rodamientos de contacto angular con resorte mantienen un juego constante en un amplio rango de temperatura.
- Transmisiones cortas. Cada engranaje es una fuente de holgura que empeora con el calor. Menos engranajes significan menos error acumulado.
Tabla de Presupuesto de Deriva
| Fuente de Deriva | Magnitud a 90°C de Temperatura del Motor | Mitigación |
|---|---|---|
| Cambio de resistencia de bobinado | Indirecto (pérdida de par, no de posición) | Aumento de corriente en bucle cerrado |
| Debilitamiento del imán | ~0.05° de error de apuntamiento | Corrección del codificador |
| Expansión térmica de la carcasa | ~0.02° por eje | Materiales coincidentes |
| Aumento del juego de engranajes | ~0.1° en el peor de los casos | Engranajes antijuego precargados |
| Deriva total no compensada | ~0.17° | — |
| Después de la corrección del firmware | <0.03° | Codificador + tabla de consulta |
Para una cámara con zoom 38X en teleobjetivo máximo, 0.17° de deriva mueven el centro de la imagen varios metros a un alcance de 500 m. Eso es suficiente para perder un objetivo rastreado. Después de la compensación, 0.03° mantiene el objetivo bien dentro del encuadre.
¿Hay un termistor interno en el motor para activar un apagado de seguridad a temperaturas críticas?
Siempre hago esta pregunta al evaluar un nuevo proveedor de motores. Si la respuesta es “no”, me marcho. Un motor sin protección térmica en un entorno de 50 °C es un riesgo de incendio.
Sí, los motores paso a paso de grado industrial diseñados para uso PTZ en exteriores incluyen un sistema integrado Termistor NTC8 (típicamente 10kΩ a 25°C) conectado directamente al bobinado del estator. Cuando la temperatura del bobinado alcanza los 130°C (Clase B) o 155°C (Clase F), el controlador activa una respuesta escalonada: primero reducción de corriente9, luego un apagado controlado si la temperatura sigue aumentando.
 temperatura de apagado de seguridad del motor paso a paso del termistor
temperatura de apagado de seguridad del motor paso a paso del termistor
Por qué la detección de temperatura externa no es suficiente
Algunos sistemas más económicos solo miden la temperatura de la placa del controlador o la temperatura del aire ambiente. Esto es un problema. El punto más caliente del sistema es siempre el bobinado del motor en sí. El bobinado puede ser 40°C–60°C más caliente que la superficie de la carcasa del motor. Para cuando la carcasa se siente peligrosamente caliente al tacto, el aislamiento del bobinado ya se está degradando.
Un termistor empotrado se encuentra dentro de la ranura del estator, en contacto térmico directo con el alambre de cobre. Lee la temperatura real del bobinado con solo 2–3 segundos de desfase térmico. Esto le da al controlador tiempo suficiente para reaccionar antes de que ocurra un daño.
La lógica de protección térmica escalonada
Un sistema bien diseñado no simplemente corta la energía cuando las cosas se calientan. Utiliza una respuesta gradual:
Etapa 1: Reducción suave (Zona de advertencia)
- Disparador: La temperatura del bobinado alcanza los 110°C (Clase B) o 135°C (Clase F).
- Acción: El controlador reduce la corriente máxima en un 20%. El motor se ralentiza pero sigue funcionando.
- Notificación: El sistema registra una advertencia térmica. Si está conectado a un VMS, envía una alerta.
Etapa 2: Reducción drástica (Zona de peligro)
- Disparador: La temperatura sigue aumentando hasta 125°C (Clase B) o 150°C (Clase F).
- Acción: La corriente cae al 50%. Solo se permiten movimientos lentos y esenciales.
- Notificación: Se envía una alarma crítica. El sistema recomienda la intervención del operador.
Etapa 3: Apagado controlado (Emergencia)
- Disparador: La temperatura alcanza los 130°C (Clase B) o 155°C (Clase F).
- Acción: La corriente del motor se va a cero. El freno mecánico se activa (si está equipado). El sistema entra en estado seguro.
- Recuperación: El motor debe enfriarse por debajo de 100 °C antes de permitir el reinicio.
Elección de la Clase de Aislamiento Adecuada
Para cualquier sistema PTZ desplegado donde las temperaturas ambiente alcancen los 50 °C, recomiendo encarecidamente aislamiento Clase F1. He aquí por qué:
- A 50 °C ambiente, un motor que funcione al 85% de su corriente tendrá un aumento de temperatura del bobinado de aproximadamente 60 °C–70 °C.
- Temperatura total del bobinado: 50 + 70 = 120 °C.
- El límite de la Clase B es de 130 °C. Eso deja solo 10 °C de margen. Un día caluroso sin viento, y estará en la zona de apagado.
- El límite de la Clase F es de 155 °C. Eso le da 35 °C de margen. El sistema puede manejar sobrecargas temporales, ganancia de calor solar en la carcasa y pérdida de eficiencia relacionada con el envejecimiento sin activar la protección.
La diferencia de costo entre los motores de Clase B y Clase F es típicamente del 10%–15%. Para un sistema que cuesta más de 1200 € para ser reparado en campo, esta es una inversión obvia.
¿Puedo monitorear la temperatura del motor en tiempo real y el consumo de energía a través de la interfaz de diagnóstico web?
Cuando despliego sistemas en ubicaciones remotas, necesito ver lo que está sucediendo sin tener que ir hasta allí. Los datos de temperatura y potencia deben estar disponibles desde mi escritorio.
Sí. Las cámaras PTZ profesionales con sistemas de motor de grado industrial exponen datos térmicos y eléctricos en tiempo real a través de su interfaz de diagnóstico web. Puede monitorear la temperatura del bobinado, la temperatura de la placa del controlador, la corriente de fase, el voltaje del bus y el estrés térmico acumulado, todo desde un navegador o a través de SNMP10integración API con su VMS13.
 interfaz de diagnóstico web monitoreo de potencia de temperatura del motor PTZ
interfaz de diagnóstico web monitoreo de potencia de temperatura del motor PTZ
¿Qué puntos de datos deben estar disponibles?
No todas las interfaces web son iguales. Una PTZ de consumo básica podría mostrarle “temperatura del dispositivo” como un solo número. Eso no es útil para el mantenimiento predictivo. Aquí se muestra lo que una interfaz de diagnóstico de grado industrial debería exponer:
Parámetros Esenciales de Telemetría
| Parámetro | Tasa de Actualización | Propósito |
|---|---|---|
| Temperatura del bobinado del motor (paneo) | Cada 1s | Detectar sobrecarga térmica antes del apagado |
| Temperatura del bobinado del motor (inclinación) | Cada 1s | El motor de inclinación a menudo funciona más caliente debido a la carga por gravedad |
| Temperatura de la placa del controlador | Cada 5s | Monitorear la salud de la electrónica |
| Corriente de fase (motor de giro) | Cada 1s | Detectar atasco mecánico o sobrecarga |
| Corriente de fase (motor de inclinación) | Cada 1s | Igual que arriba |
| Voltaje del bus | Cada 5s | Detectar caída de voltaje de la fuente de alimentación bajo carga |
| Horas térmicas acumuladas | Registro diario | Rastrea el envejecimiento del aislamiento a lo largo del tiempo |
| Conteo de eventos térmicos | Basado en eventos | Contar cuántas veces se activó la reducción de potencia |
Integración con Plataformas de Monitoreo
Para implementaciones grandes con 50–500+ cámaras, nadie mira las interfaces web individuales. Los datos deben fluir hacia una plataforma central. Los métodos estándar son:
- Trampas y sondeos SNMP. La cámara actúa como un agente SNMP. Su NMS (como PRTG o Zabbix) consulta OIDs de temperatura y activa alertas cuando se superan los umbrales.
- [API REST11. La cámara expone un endpoint JSON (por ejemplo,
/api/v1/diagnostics/thermal) que su panel personalizado puede consultar. - [ONVIF12 eventos de análisis. Algunos sistemas publican alertas térmicas como eventos de análisis ONVIF, a los que cualquier VMS compatible puede suscribirse.
Uso de datos térmicos para el mantenimiento predictivo
El verdadero valor de estos datos no es solo evitar paradas. Es predecir fallos antes de que ocurran. He aquí cómo:
Si registra la temperatura del motor durante meses, notará una tendencia. Un motor sano en un entorno de 50 °C podría estabilizarse a 105 °C durante un ciclo de patrulla. Si ese número aumenta a 115 °C durante seis meses sin cambios en las condiciones ambientales, algo va mal. Quizás un rodamiento se esté desgastando y añadiendo fricción. Quizás el disipador de calor esté obstruido por el polvo. Quizás la grasa del engranaje se haya secado.
Al detectar esta tendencia de forma temprana, puede programar el mantenimiento durante una visita planificada en lugar de responder a una avería de emergencia. Para sitios remotos donde una intervención técnica cuesta $500–$1,000, este tipo de visibilidad se amortiza después de prevenir una sola llamada de servicio no planificada.
También recomiendo configurar alertas automáticas en dos niveles: una alerta de “vigilancia” al 80% del umbral de parada (para tener días o semanas para planificar) y una alerta “crítica” al 90% (para tener horas para actuar).
Conclusión
A 50 °C de ambiente, la supervivencia del motor paso a paso depende de una escala de corriente inteligente, compensación de deriva térmica, protección de termistor integrada y monitorización remota. Elija aislamiento Clase F, utilice controladores de bucle cerrado y exija siempre telemetría térmica en tiempo real a su proveedor de PTZ.
1. Obtenga información sobre las clases de aislamiento de motores y los límites térmicos de la Clase F (155 °C) para entornos de alta temperatura. ︎↩︎ 2. Consulte la hoja de datos y las características del controlador de motor paso a paso TMC2209 de Trinamic. ︎↩︎ 3. Explore la cartera de Trinamic de controladores de motor paso a paso y tecnologías de control de movimiento. ︎↩︎ 4. Comprenda el parámetro TPOWERDOWN que controla el tiempo de reducción de corriente en reposo en los controladores Trinamic. ︎↩︎ 5. Descubra cómo el control de corriente adaptativo a la carga reduce el consumo de energía al ajustar el par a la demanda. ︎↩︎ 6. Aprenda cómo la expansión térmica y los cambios en las propiedades de los materiales causan deriva posicional en los motores. ︎↩︎ 7. Comprenda cómo la retroalimentación del codificador compensa los efectos térmicos y mejora la precisión del motor paso a paso. ︎↩︎ 8. Obtenga una descripción general de los termistores NTC y su uso en la detección de temperatura para bobinados de motores. ︎↩︎ 9. Aprenda sobre la reducción de potencia como estrategia de gestión térmica para proteger los componentes electrónicos. ︎↩︎ 10. Comprenda cómo SNMP permite la monitorización y gestión remota de dispositivos de red como las cámaras PTZ. ︎↩︎ 11. Aprenda sobre las API RESTful y cómo permiten el acceso programático a los diagnósticos de dispositivos. ︎↩︎ 12. Explore el estándar ONVIF para la interoperabilidad de dispositivos de seguridad basados en IP. ︎↩︎ 13. Aprenda sobre los sistemas de gestión de vídeo y cómo se integran con la telemetría de la cámara. ︎↩︎