
J'ai vu des moteurs pas à pas tomber en panne sur le terrain après un seul été. La cause profonde est presque toujours la même : aucun plan de gestion thermique pour les températures ambiantes élevées.
À 50°C (122°F), les moteurs pas à pas fonctionnent près du point critique de leur classe d'isolation. Sans une logique de contrôle de courant et une conception de dissipation thermique appropriées, la durée de vie de l'enroulement du moteur diminue rapidement. Les contrôleurs de qualité industrielle utilisent une mise à l'échelle adaptative du courant, une optimisation PWM et un pont thermique physique pour maintenir les moteurs en fonctionnement dans des conditions de chaleur extrême.
 dissipation thermique moteur pas à pas contrôle courant logique 50 degrés
dissipation thermique moteur pas à pas contrôle courant logique 50 degrés
Ci-dessous, j'expliquerai la logique exacte et la conception matérielle qui permettent aux moteurs pas à pas PTZ de fonctionner de manière fiable lorsque l'air lui-même est suffisamment chaud pour cuire l'électronique. Chaque section répond à une question spécifique que j'entends de la part des intégrateurs de systèmes travaillant dans des endroits comme le Texas, le Moyen-Orient et l'Asie du Sud-Est.
Table des matières
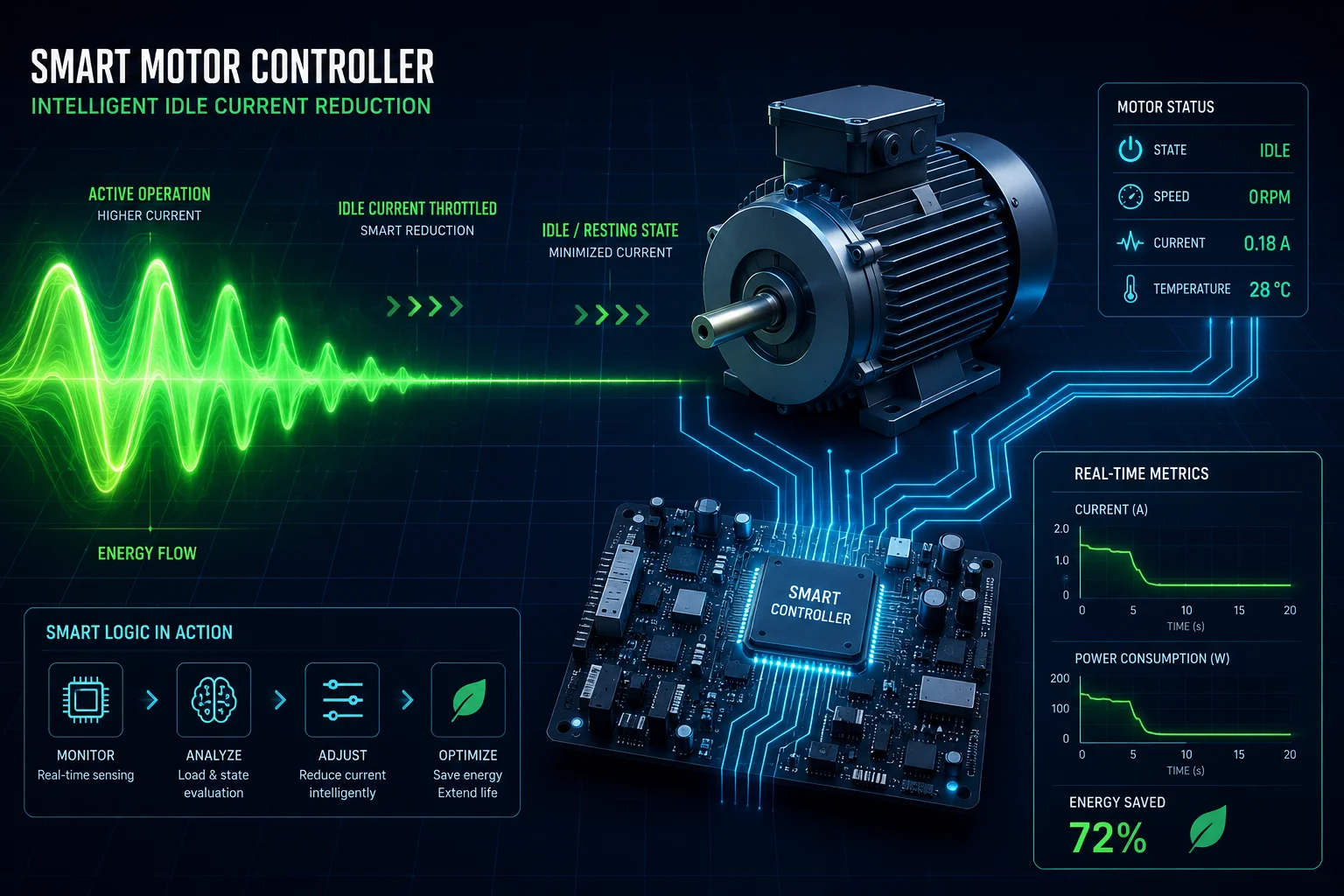
Le contrôleur moteur utilise-t-il la “mise à l'échelle intelligente du courant” pour réduire la chaleur lorsque le PTZ est inactif ?
La plupart des dommages thermiques que j'ai constatés sur le terrain se produisent non pas pendant le mouvement, mais lorsque le moteur est immobile. On oublie qu'un moteur pas à pas consomme un courant de maintien même lorsqu'il ne bouge pas.
Oui. Les contrôleurs PTZ industriels utilisent une réduction automatique du courant de ralenti. Lorsque le moteur cesse de bouger pendant 100 à 500 ms, le pilote réduit le courant à 30 % à 50 % de la valeur de fonctionnement. Cette seule fonctionnalité empêche la cause la plus fréquente de défaillance thermique : l'accumulation de chaleur à l'arrêt.
 mise à l'échelle intelligente du courant PTZ ralenti moteur pas à pas
mise à l'échelle intelligente du courant PTZ ralenti moteur pas à pas
Pourquoi le courant de ralenti est le tueur silencieux
Un moteur pas à pas génère de la chaleur par perte de cuivre. La formule est simple : P = I²R. La perte de puissance est égale au courant au carré multiplié par la résistance. Cela signifie que si vous réduisez le courant de moitié, vous réduisez la génération de chaleur de 75 %. C'est une différence énorme lorsque le moteur reste inactif pendant des heures entre les balayages de patrouille.
Dans un déploiement de surveillance PTZ typique, la caméra passe 80 % à 90 % de son temps dans une position fixe. Pendant ce temps, le moteur a toujours besoin d'un certain courant pour maintenir sa position contre la charge du vent. Mais il n'a pas besoin du courant de fonctionnement complet. La mise à l'échelle intelligente du courant résout ce problème en utilisant une logique de réduction progressive basée sur un minuteur :
Le flux logique de réduction progressive
- Le moteur termine son dernier mouvement commandé.
- Un minuteur démarre (généralement 100 à 500 ms, configurable).
- Si aucune nouvelle commande de mouvement n'arrive, le pilote réduit le courant de phase au niveau de ralenti préréglé.
- Si une nouvelle commande arrive, le courant revient à pleine puissance en moins de 10 ms.
Cette logique est intégrée dans la plupart des pilotes de moteurs pas à pas modernes tels que les TMC22092 ou les TMC5160 de Trinamic3. Le paramètre clé s'appelle “TPOWERDOWN4” — le délai avant que la réduction du courant ne s'active.
Paramètres de mise à l'échelle du courant pour les environnements à 50°C
| Paramètres | Paramètre standard (25°C) | Paramètre recommandé (50°C) | Raison |
|---|---|---|---|
| Courant de fonctionnement | 100% du nominal | 70%–85% du nominal | Laisser une marge thermique |
| Courant au ralenti | 50%–70% du nominal | 30%–50% du nominal | Empêcher l'accumulation de chaleur à l'arrêt |
| Délai de mise hors tension | 500ms | 100–200 ms | Réduire le temps de ralenti à pleine puissance |
| Temps de montée en courant | 10 ms | 10 ms | Aucun changement nécessaire pour la réactivité |
Courant adaptatif à la charge (systèmes en boucle fermée)
Pour les systèmes PTZ avec un encodeur sur l'arbre du moteur, le contrôleur peut faire quelque chose d'encore plus intelligent. Il mesure la demande de couple réelle en temps réel. Si le vent est calme et que la caméra est légère, le contrôleur n'envoie que le courant dont le moteur a réellement besoin. C'est ce qu'on appelle le contrôle de courant adaptatif à la charge5.
Dans un environnement de 50°C, cette approche peut réduire la consommation d'énergie moyenne de 30 % à 40 % par rapport aux systèmes en boucle ouverte qui fonctionnent toujours à pleine puissance. Le compromis est le coût : vous avez besoin d'un encodeur et d'un pilote en boucle fermée. Mais pour un système qui doit durer 10 ans sur un mât en plein soleil, l'investissement se rentabilise grâce aux interventions évitées.
Comment le système empêche-t-il la “dérive thermique” du moteur d'affecter la précision du suivi en plein été ?
Des intégrateurs m'ont dit que leurs caméras PTZ perdaient lentement leur précision de pointage à mesure que la journée se réchauffe. Ils recalibrent le matin, et à 14 heures, les préréglages sont décalés de quelques dixièmes de degré. C'est la dérive thermique.
Dérive thermique6 se produit parce que la chaleur modifie les dimensions physiques des composants du moteur et les propriétés magnétiques du rotor. Pour éviter cela, les systèmes PTZ industriels utilisent une correction en boucle fermée basée sur un encodeur7, un firmware compensé en température et des conceptions mécaniques qui limitent la dilatation thermique à des axes prévisibles.
 dérive thermique moteur pas à pas précision de suivi PTZ
dérive thermique moteur pas à pas précision de suivi PTZ
Causes de la dérive thermique dans les moteurs pas à pas
Lorsqu'un moteur pas à pas chauffe de 25°C à 90°C (ce qui est courant à 50°C ambiant sous charge), plusieurs choses changent :
- La résistance de l'enroulement augmente. Le cuivre a un coefficient de température positif d'environ 0,39 % par °C. Une augmentation de 65°C signifie que la résistance augmente d'environ 25 %. Cela réduit le couple disponible à la même tension.
- La force de l'aimant diminue. Les aimants en néodyme perdent environ 0,11 % de leur force de champ par °C. À 90°C, les aimants du rotor sont environ 7 % plus faibles qu'à température ambiante.
- Expansion mécanique. Le boîtier en aluminium se dilate. L'arbre en acier se dilate à un rythme différent. Le précharge du roulement change. Tout cela introduit un jeu infime dans le train d'engrenages.
Comment le firmware compense
Les contrôleurs PTZ modernes stockent une table de correspondance température-décalage dans le firmware. Voici comment fonctionne la boucle de compensation :
- Une thermistance sur le corps du moteur signale la température toutes les 500 ms.
- Le firmware recherche le décalage de position attendu pour cette température.
- Le contrôleur applique un facteur de correction à toutes les positions prédéfinies.
- Si le système dispose d'un encodeur, il vérifie également l'angle réel de l'arbre par rapport à l'angle commandé.
Choix de conception mécanique qui réduisent la dérive
La meilleure approche consiste à minimiser la dérive au niveau matériel afin que le firmware ait moins de travail à effectuer :
- Matériaux à dilatation thermique assortis. Utiliser des engrenages en acier avec des arbres en acier, et non des assemblages mixtes aluminium-acier.
- Roulements préchargés. Les roulements à contact angulaire à ressort maintiennent un jeu constant sur une large plage de températures.
- Trains d'engrenages courts. Chaque engrenage est une source de jeu qui s'aggrave avec la chaleur. Moins d'engrenages signifie moins d'erreurs accumulées.
Tableau du budget de dérive
| Source de dérive | Amplitude à 90°C de température moteur | Atténuation |
|---|---|---|
| Variation de la résistance d'enroulement | Indirect (perte de couple, pas de position) | Intensification de courant en boucle fermée |
| Affaiblissement de l'aimant | Erreur de pointage ~0,05° | Correction de l'encodeur |
| Dilatation thermique du boîtier | ~0,02° par axe | Matériaux assortis |
| Augmentation du jeu d'engrenage | ~0,1° dans le pire des cas | Engrenages anti-jeu préchargés |
| Dérive totale non compensée | ~0,17° | — |
| Après correction du firmware | <0,03° | Encodeur + table de correspondance |
Pour une caméra à zoom 38X à téléobjectif maximum, une dérive de 0,17° déplace le centre de l'image de plusieurs mètres à une portée de 500 m. C'est suffisant pour perdre une cible suivie. Après compensation, 0,03° maintient la cible bien dans le cadre.
Y a-t-il une thermistance interne sur le moteur pour déclencher un arrêt de sécurité à des températures critiques ?
Je pose toujours cette question lors de l'évaluation d'un nouveau fournisseur de moteurs. Si la réponse est “ non ”, je m'en vais. Un moteur sans protection thermique dans un environnement de 50°C présente un risque d'incendie.
Oui, les moteurs pas à pas de qualité industrielle conçus pour une utilisation extérieure PTZ incluent un système intégré thermistance CTN8 (typiquement 10 kΩ à 25 °C) directement fixé à l'enroulement du stator. Lorsque la température de l'enroulement atteint 130 °C (Classe B) ou 155 °C (Classe F), le contrôleur déclenche une réponse échelonnée : d'abord réduction du courant9, puis un arrêt contrôlé si la température continue d'augmenter.
 température d'arrêt de sécurité du moteur pas à pas à thermistance
température d'arrêt de sécurité du moteur pas à pas à thermistance
Pourquoi la détection de température externe n'est pas suffisante
Certains systèmes moins chers ne mesurent que la température de la carte pilote ou la température ambiante de l'air. C'est un problème. Le point le plus chaud du système est toujours l'enroulement du moteur lui-même. L'enroulement peut être 40 °C à 60 °C plus chaud que la surface du carter du moteur. Au moment où le carter devient dangereusement chaud au toucher, l'isolation de l'enroulement se dégrade déjà.
Une thermistance intégrée se trouve dans la fente du stator, en contact thermique direct avec le fil de cuivre. Elle mesure la température réelle de l'enroulement avec un décalage thermique de seulement 2 à 3 secondes. Cela donne au contrôleur suffisamment de temps pour réagir avant que des dommages ne surviennent.
La logique de protection thermique échelonnée
Un système bien conçu ne coupe pas simplement l'alimentation lorsque les choses chauffent. Il utilise une réponse graduée :
Étape 1 : Réduction progressive du courant (Zone d'avertissement)
- Déclenchement : La température de l'enroulement atteint 110 °C (Classe B) ou 135 °C (Classe F).
- Action : Le contrôleur réduit le courant maximum de 20 %. Le moteur ralentit mais continue de fonctionner.
- Notification : Le système enregistre un avertissement thermique. S'il est connecté à un VMS, il envoie une alerte.
Étape 2 : Réduction sévère du courant (Zone de danger)
- Déclenchement : La température continue d'augmenter jusqu'à 125 °C (Classe B) ou 150 °C (Classe F).
- Action : Le courant chute à 50 %. Seuls les mouvements lents et essentiels sont autorisés.
- Notification : Alarme critique envoyée. Le système recommande une intervention de l'opérateur.
Étape 3 : Arrêt contrôlé (Urgence)
- Déclenchement : La température atteint 130 °C (Classe B) ou 155 °C (Classe F).
- Action : Le courant du moteur passe à zéro. Le frein mécanique s'engage (si équipé). Le système entre dans un état de sécurité.
- Récupération : Le moteur doit refroidir en dessous de 100°C avant que le redémarrage ne soit autorisé.
Choisir la bonne classe d'isolation
Pour tout système PTZ déployé où les températures ambiantes atteignent 50°C, je recommande fortement l'isolation de classe F1. Voici pourquoi :
- À 50°C ambiant, un moteur fonctionnant à 85% de courant aura une élévation de température de bobinage d'environ 60°C–70°C.
- Température totale du bobinage : 50 + 70 = 120°C.
- La limite de la classe B est de 130°C. Il ne reste que 10°C de marge. Une journée chaude sans vent, et vous êtes dans la zone d'arrêt.
- La limite de la classe F est de 155°C. Cela vous donne 35°C de marge. Le système peut gérer les surcharges temporaires, le gain de chaleur solaire sur le boîtier et la perte d'efficacité liée au vieillissement sans déclencher la protection.
La différence de coût entre les moteurs de classe B et de classe F est généralement de 10%–15%. Pour un système dont le coût de maintenance sur site est de 200€+, c'est un investissement évident.
Puis-je surveiller la température du moteur en temps réel et la consommation d'énergie via l'interface utilisateur de diagnostic Web ?
Lorsque je déploie des systèmes dans des endroits éloignés, j'ai besoin de voir ce qui se passe sans avoir à me déplacer. Les données de température et de puissance doivent être disponibles depuis mon bureau.
Oui. Les caméras PTZ professionnelles avec des systèmes de moteurs de qualité industrielle exposent des données thermiques et électriques en temps réel via leur interface de diagnostic web. Vous pouvez surveiller la température du bobinage, la température de la carte pilote, le courant de phase, la tension du bus et le stress thermique cumulé — le tout depuis un navigateur ou via SNMP10une intégration API avec votre VMS13.
 interface de diagnostic web surveillance de la température du moteur surveillance de la puissance PTZ
interface de diagnostic web surveillance de la température du moteur surveillance de la puissance PTZ
Quels points de données doivent être disponibles
Toutes les interfaces web ne se valent pas. Une PTZ grand public basique peut vous montrer la “température de l'appareil” sous forme d'un seul chiffre. Ce n'est pas utile pour la maintenance prédictive. Voici ce qu'une interface de diagnostic de qualité industrielle devrait exposer :
Paramètres de télémétrie essentiels
| Paramètres | Taux de mise à jour | Objectif |
|---|---|---|
| Température du bobinage du moteur (panoramique) | Toutes les 1s | Détecter la surcharge thermique avant l'arrêt |
| Température de bobinage du moteur (inclinaison) | Toutes les 1s | Le moteur d'inclinaison chauffe souvent davantage en raison de la charge gravitationnelle |
| Température de la carte du pilote | Toutes les 5 secondes | Surveiller la santé de l'électronique |
| Courant de phase (moteur d'orientation) | Toutes les 1s | Détecter un blocage mécanique ou une surcharge |
| Courant de phase (moteur d'inclinaison) | Toutes les 1s | Identique à ci-dessus |
| Tension du bus | Toutes les 5 secondes | Détecter un affaissement de l'alimentation sous charge |
| Heures thermiques cumulées | Journal quotidien | Suivre le vieillissement de l'isolation dans le temps |
| Nombre d'événements thermiques | Basé sur les événements | Compter le nombre de fois où une détarification a été déclenchée |
Intégration avec les plateformes de surveillance
Pour les déploiements importants de 50 à 500 caméras ou plus, personne ne surveille les interfaces Web individuelles. Les données doivent être transmises à une plateforme centrale. Les méthodes standard sont :
- Pièges SNMP et interrogation. La caméra agit comme un agent SNMP. Votre NMS (comme PRTG ou Zabbix) interroge les OID de température et déclenche des alertes lorsque les seuils sont dépassés.
- [API REST11. La caméra expose un point de terminaison JSON (par exemple,
/api/v1/diagnostics/thermal) que votre tableau de bord personnalisé peut interroger. - [ONVIF12 événements d'analyse. Certains systèmes publient des alertes thermiques sous forme d'événements d'analyse ONVIF, auxquels tout VMS compatible peut s'abonner.
Utilisation des données thermiques pour la maintenance prédictive
La vraie valeur de ces données n'est pas seulement d'éviter les arrêts. Il s'agit de prédire les pannes avant qu'elles ne se produisent. Voici comment :
Si vous enregistrez la température du moteur sur plusieurs mois, vous remarquerez une tendance. Un moteur sain dans un environnement de 50°C peut se stabiliser à 105°C pendant un cycle de patrouille. Si ce chiffre passe à 115°C sur six mois sans changement des conditions ambiantes, quelque chose ne va pas. Peut-être qu'un roulement s'use et ajoute du frottement. Peut-être que la poussière a obstrué le dissipateur thermique. Peut-être que la graisse de l'engrenage a séché.
En détectant cette tendance tôt, vous pouvez planifier la maintenance lors d'une visite prévue au lieu de réagir à une panne d'urgence. Pour les sites distants où une intervention coûte 500 à 1000 $, ce type de visibilité se rentabilise après avoir évité un seul appel de service imprévu.
Je recommande également de configurer des alertes automatisées à deux niveaux : une alerte de “ surveillance ” à 80 % du seuil d'arrêt (pour avoir des jours ou des semaines pour planifier), et une alerte “ critique ” à 90 % (pour avoir des heures pour agir).
Conclusion
À 50°C ambiant, la survie du moteur pas à pas dépend d'une mise à l'échelle intelligente du courant, d'une compensation de la dérive thermique, d'une protection de thermistance intégrée et d'une surveillance à distance. Choisissez une isolation de classe F, utilisez des pilotes en boucle fermée et exigez toujours une télémétrie thermique en temps réel de votre fournisseur PTZ.
1. Apprenez-en davantage sur les classes d'isolation des moteurs et les limites thermiques de la classe F (155°C) pour les environnements à haute température. ︎↩︎ 2. Consultez la fiche technique et les caractéristiques du pilote de moteur pas à pas TMC2209 de Trinamic. ︎↩︎ 3. Explorez le portefeuille de pilotes de moteurs pas à pas et de technologies de contrôle de mouvement de Trinamic. ︎↩︎ 4. Comprenez le paramètre TPOWERDOWN qui contrôle le moment de la réduction du courant au ralenti dans les pilotes Trinamic. ︎↩︎ 5. Découvrez comment le contrôle adaptatif de courant en fonction de la charge réduit la consommation d'énergie en adaptant le couple à la demande. ︎↩︎ 6. Apprenez comment la dilatation thermique et les changements de propriétés des matériaux provoquent une dérive positionnelle dans les moteurs. ︎↩︎ 7. Comprenez comment le retour d'encodeur compense les effets thermiques et améliore la précision des moteurs pas à pas. ︎↩︎ 8. Obtenez un aperçu des thermistances CTN et de leur utilisation dans la détection de température pour les enroulements de moteurs. ︎↩︎ 9. Apprenez ce qu'est la détarification en tant que stratégie de gestion thermique pour protéger les composants électroniques. ︎↩︎ 10. Comprenez comment le SNMP permet la surveillance et la gestion à distance des appareils réseau tels que les caméras PTZ. ︎↩︎ 11. Apprenez ce que sont les API RESTful et comment elles permettent un accès programmatique aux diagnostics des appareils. ︎↩︎ 12. Explorez la norme ONVIF pour l'interopérabilité des appareils de sécurité basés sur IP. ︎↩︎ 13. Apprenez ce que sont les systèmes de gestion vidéo et comment ils s'intègrent à la télémétrie des caméras. ︎↩︎