
Já vi integradores perderem horas ajustando uma PTZ para a esquerda, direita, para cima, para baixo — tentando atingir o ângulo exato de que precisam. Existe um caminho melhor.
Sim, você pode obter controle de posicionamento absoluto1 em câmeras PTZ de nível industrial. Em vez de enviar comandos de “mover para a esquerda” ou “mover para a direita”, você envia coordenadas exatas em graus — como Pan 180°, Tilt 45° — e a câmera se move para essa posição precisa instantaneamente. Isso requer hardware com encoders absolutos e suporte de protocolo via ONVIF, Pelco-D5, ou API HTTP6.
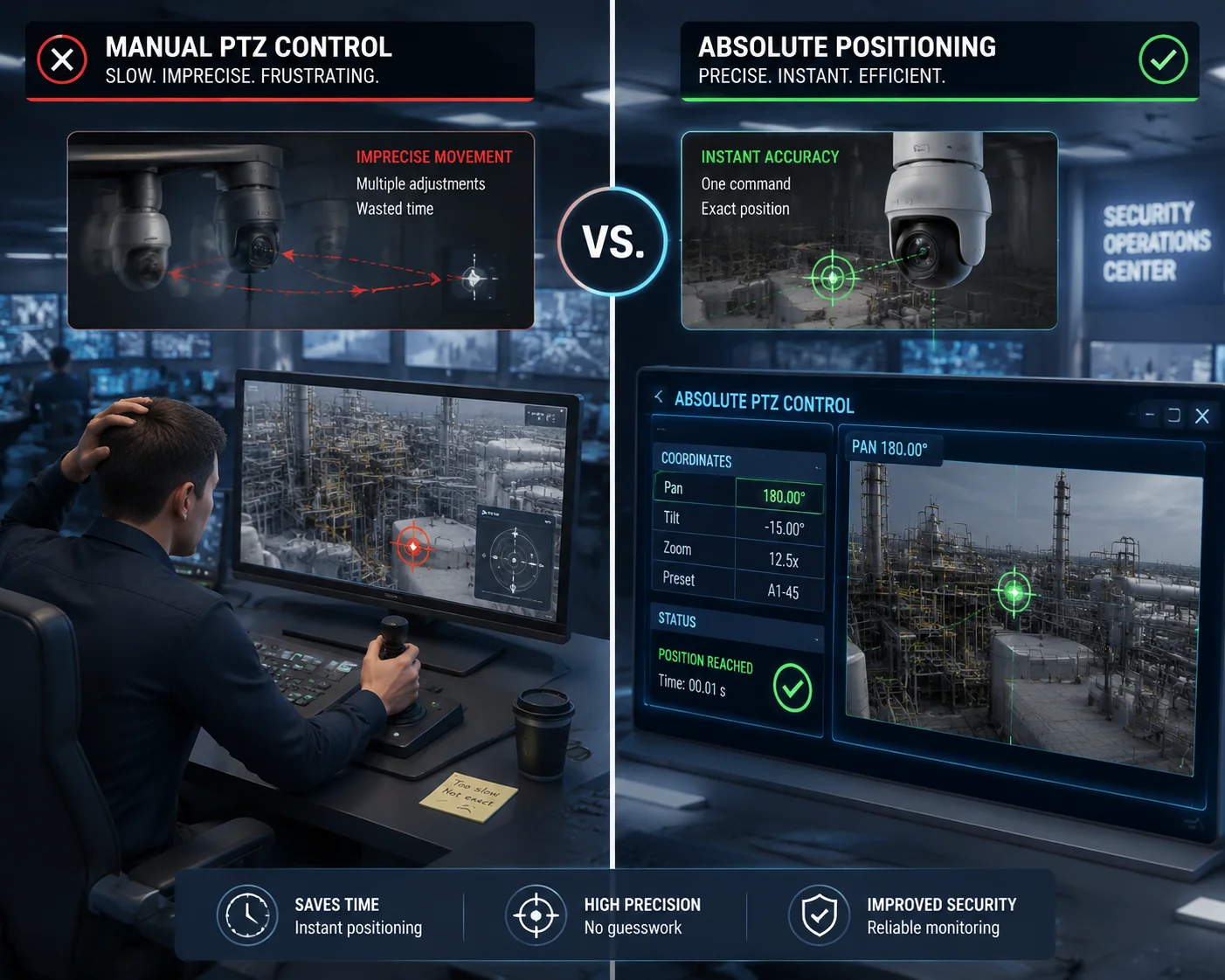 Controle de posicionamento absoluto de câmeras PTZ vs. movimento relativo
Controle de posicionamento absoluto de câmeras PTZ vs. movimento relativo
O posicionamento absoluto muda tudo sobre como você projeta um sistema de vigilância. É a base para rastreamento por radar, integração de mapas GIS e resposta automatizada impulsionada por IA. Abaixo, detalho as principais perguntas que os integradores me fazem sobre este recurso — e forneço as respostas técnicas reais.
Índice
Posso comandar a PTZ para ir exatamente para Pan 180°, Tilt 45° via uma string ONVIF?
Recebo essa pergunta quase toda semana de integradores de sistemas. Eles querem saber se podem enviar um comando e ter a câmera pousar em uma coordenada exata. A resposta é importante porque todo o fluxo de trabalho de automação deles depende disso.
Sim, você pode. Perfil S do ONVIF11 e ONVIF Perfil T12 ambos suportam o MovimentoAbsoluto comando. Você envia uma solicitação SOAP com valores normalizados de Pan, Tilt e Zoom, e a câmera se move diretamente para essa posição exata. O requisito principal é que seu hardware PTZ deve ter encoders absolutos2 embutidos nos motores.
 Controle de câmera PTZ com comando ONVIF AbsoluteMove
Controle de câmera PTZ com comando ONVIF AbsoluteMove
1. Como Funciona o Comando AbsoluteMove do ONVIF
2. O protocolo ONVIF usa 3. valores normalizados 4. em vez de números brutos de graus. Isso significa que os valores de Pan e Tilt variam de $-1.0$ a $+1.0$, e o Zoom varia de $0.0$ a $1.0$. Seu VMS ou plataforma de automação converte os graus do mundo real nesses valores normalizados antes de enviar o comando.
5. Veja como é uma solicitação SOAP típica do ONVIF na prática: MovimentoAbsoluto A solicitação SOAP se parece na prática:
7.MainStream, " maps to Pan $180^{\circ}$ (the midpoint of a $360^{\circ}$ range), and " .
The Hardware Behind the Command
8. Neste exemplo, 9. x="0.0".
10. corresponde a Pan $180^{\circ}$ (o ponto médio de um intervalo de $360^{\circ}$), e
| Recurso | 11. y="0.25" | 12. corresponde a Tilt $45^{\circ}$ (um quarto do caminho para cima a partir do centro). O mapeamento exato depende do sistema de coordenadas da câmera, mas a lógica é a mesma em todos os dispositivos compatíveis com ONVIF. |
|---|---|---|
| 13. O Hardware por Trás do Comando | 14. Enviar o comando é a parte fácil. A parte difícil é garantir que a câmera realmente chegue onde você disse que ela deveria ir. Isso se resume a um componente: o | Conhecido imediatamente |
| Desvio ao longo do tempo | Acumula erro | Sem desvio |
| Custo | Inferior | Mais alto |
| Caso de uso | PTZ de Consumo, predefinições básicas | PTZ Industrial, integração de radar |
| Precisão | $\pm 1.0^{\circ}$ típico | $\pm 0.1^{\circ}$ ou melhor |
Uma câmera com encoders incrementais3 ainda pode aceitar um MovimentoAbsoluto comando. Mas após um ciclo de energia, ela perde seu ponto de referência. Ela tem que executar uma rotina de “homing” — girando até um batente físico — antes de saber onde está novamente. Durante esse tempo, seu sistema de automação fica cego.
Um encoder absoluto sabe sua posição exata no momento em que a energia é ligada. Sem homing. Sem atraso. É por isso que sempre recomendo encoders absolutos para qualquer projeto que envolva rastreamento automatizado ou integração GIS.
Fórmula de Conversão: Graus para Valores Normalizados
Se sua plataforma de automação funciona em graus, mas o ONVIF precisa de valores normalizados, aqui está a matemática básica:
$$x_{pan} = \frac{(\text{Pan Alvo} – 180)}{180}$$
$$y_{tilt} = \frac{\text{Inclinação Alvo}}{90}$$
Então, para Pan $180^{\circ}$, Inclinação $45^{\circ}$:
- $x_{pan} = \frac{(180 – 180)}{180} = 0.0$
- $y_{tilt} = \frac{45}{90} = 0.5$
Esta fórmula funciona para a maioria das câmeras, mas sempre verifique o mapeamento de coordenadas do fabricante. Algumas câmeras definem $0^{\circ}$ como Norte, outras definem como a posição de ligar.
O recurso de Posicionamento Absoluto permite uma melhor integração com mapas GIS?
Já vi projetos falharem porque o integrador não conseguiu vincular seu software de mapa à câmera PTZ. Eles tinham um belo painel GIS, mas a câmera ficava lá parada sem fazer nada quando um alarme era acionado. Isso é um desperdício doloroso de orçamento.
O posicionamento absoluto é a chave que desbloqueia o real integração GIS4. Quando sua câmera relata seus ângulos exatos de Pan e Tilt, seu software GIS pode calcular exatamente o que a câmera está vendo no mapa. E quando você clica em um ponto no mapa, o software pode converter essa coordenada GPS em um comando Pan/Tilt e enviar a câmera para lá instantaneamente.
 Integração de mapa GIS com posicionamento absoluto PTZ
Integração de mapa GIS com posicionamento absoluto PTZ
A matemática por trás da conversão GIS para PTZ
Para vincular um mapa GIS a uma câmera PTZ, você precisa de três informações:
- Localização GPS da câmera — latitude e longitude da posição de montagem da câmera.
- Orientação de montagem da câmera — para qual direção da bússola a câmera aponta em Pan $0^{\circ}$.
- Localização GPS do alvo — o ponto no mapa para o qual você deseja que a câmera olhe.
Com essas três entradas, você calcula o azimute13 (direção da bússola) da câmera para o alvo:
$$\text{Azimute} = \arctan2\left(\sin(\Delta\lambda) \cdot \cos(\phi_2),\ \cos(\phi_1) \cdot \sin(\phi_2) – \sin(\phi_1) \cdot \cos(\phi_2) \cdot \cos(\Delta\lambda)\right)$$
Onde $\phi_1$ é a latitude da câmera, $\phi_2$ é a latitude do alvo e $\Delta\lambda$ é a diferença de longitude. O resultado lhe dá o ângulo Pan. O Tilt é calculado com base na distância e na diferença de altura.
Por que o movimento relativo quebra a integração GIS
Com movimento relativo, você só pode dizer “gire 5 graus para a esquerda”. Mas o software GIS não pensa em termos relativos. Ele pensa em coordenadas absolutas. Se o sistema GIS calcular que um alvo está no azimute $237^{\circ}$, ele precisa enviar Pan = 237° diretamente. Não há uma maneira confiável de fazer isso com comandos relativos porque:
- Você não sabe a posição atual da câmera com precisão.
- A latência da rede torna os comandos de “parar” não confiáveis.
- Pequenos erros se acumulam em vários movimentos.
Arquitetura de Integração GIS do Mundo Real
Veja como é uma pilha completa de integração GIS-PTZ:
| Camada | Componente | Função |
|---|---|---|
| Detecção | Radar / Sensor de Perímetro | Detecta intrusão, emite coordenada GPS |
| Processamento | Servidor GIS (por exemplo, ArcGIS, QGIS) | Converte GPS para ângulo de azimute da câmera |
| Comando | Cliente ONVIF / API HTTP | Envia AbsoluteMove para a câmera PTZ |
| Feedback | Consulta de Status PTZ | Confirma que a câmera atingiu a posição alvo |
| Exibição | VMS / Painel Web | Exibe vídeo ao vivo com sobreposição de mapa |
O loop de feedback é crítico. Após enviar o comando, seu sistema deve consultar o status PTZ para confirmar que ele realmente chegou ao ângulo alvo. É aqui que os encoders absolutos provam seu valor — a posição relatada corresponde à realidade.
Dicas Práticas para Implantação em Campo
Na minha experiência trabalhando com integradores em projetos externos, há algumas coisas que podem prejudicar a precisão do seu GIS para PTZ:
- Oscilação do poste devido ao vento. Um poste de 10 metros com vento de 30 mph pode oscilar de $1^{\circ}$ a $2^{\circ}$. A 500 metros de distância, isso representa um erro de 9 a 17 metros no solo.
- Declinação magnética. Se você calibrar o Norte da sua câmera usando uma bússola, lembre-se que o Norte magnético não é o Norte verdadeiro. No Texas, a diferença pode ser de $4^{\circ}$ a $8^{\circ}$.
- Alinhamento de montagem. Mesmo um erro de $0.5^{\circ}$ na forma como a câmera é montada no suporte se propagará para cada comando GIS.
Eu sempre recomendo fazer uma calibração de campo após a instalação. Escolha três pontos de referência conhecidos, anote suas coordenadas GPS, comande a câmera para cada um e meça o desvio. Em seguida, aplique um fator de correção em seu software.
Quão precisa é o retorno de coordenadas baseado em graus quando consulto o status da PTZ?
Já tive clientes que me disseram que suas câmeras PTZ anteriores relatavam um ângulo, mas na verdade estavam apontando para outro lugar. Ao construir um sistema automatizado, dados de posição incorretos são piores do que nenhum dado.
Em câmeras PTZ de nível industrial com encoders absolutos, a precisão da consulta de posição geralmente fica dentro de $\pm 0.1^{\circ}$. Você pode consultar os valores atuais de Pan, Tilt e Zoom a qualquer momento através de chamadas ONVIF ObterStatus ou API HTTP. Os valores retornados refletem a posição física real dos motores, não apenas a última posição comandada.
 Precisão da consulta de status PTZ retorno de coordenadas baseado em graus
Precisão da consulta de status PTZ retorno de coordenadas baseado em graus
Como Funcionam as Consultas de Posição
Quando você envia um ObterStatus solicitação via ONVIF, a câmera lê os valores atuais do encoder e os converte em coordenadas normalizadas. A resposta se parece com isto:
<GetStatusResponse>
<PTZStatus>
<Position>
<PanTilt x="-0.333" y="0.125" />
<Zoom x="0.75" />
</Position>
<MoveStatus>
<PanTilt>IDLE</PanTilt>
<Zoom>IDLE</Zoom>
</MoveStatus>
</PTZStatus>
</GetStatusResponse>O MoveStatus campo informa se a câmera ainda está em movimento ou atingiu seu alvo. Isso é importante para automação — você não deve capturar um instantâneo até que o status mostre IDLE.
Fontes de Erro de Posição
Mesmo com encoders absolutos, existem fatores que afetam a precisão:
Folga Mecânica
Folga é o pequeno espaço entre as engrenagens. Quando o motor inverte a direção, as engrenagens precisam “preencher” essa folga antes que a câmera comece a se mover. O encoder pode relatar a posição do motor corretamente, mas a lente da câmera aponta ligeiramente para fora devido à folga da engrenagem.
Boas câmeras PTZ incluem compensação de folga14 em seu firmware. Isso significa que o motor intencionalmente ultrapassa o alvo e depois se aproxima dele da mesma direção sempre, eliminando o erro de folga da engrenagem.
Efeitos da Temperatura
Engrenagens de metal expandem e contraem com a temperatura. Em um verão no Texas, o invólucro da câmera pode atingir $70^{\circ}C$ internamente. Isso pode deslocar o engate da engrenagem em uma pequena quantidade. Ao longo de uma rotação de $360^{\circ}$, o erro cumulativo pode atingir $0.2^{\circ}$ a $0.3^{\circ}$.
Comparação de Precisão por Categoria de Câmera
| Categoria de Câmera | Tipo de codificador | Precisão Típica | Taxa de Atualização de Consulta de Posição |
|---|---|---|---|
| Consumidor / Prosumer | Incremental | $\pm 1.0^{\circ}$ a $\pm 2.0^{\circ}$ | 1 Hz |
| Comercial de Médio Alcance | Incremental + Sensor de Home | $\pm 0.5^{\circ}$ | 2-5 Hz |
| Grau Industrial / Militar | Absoluto (Multivoltas) | $\pm 0.05^{\circ}$ a $\pm 0.1^{\circ}$ | 10+ Hz |
Por que a Velocidade de Consulta Importa
Se você estiver fazendo rastreamento automático guiado por radar, a câmera precisa relatar sua posição rápido o suficiente para que o algoritmo de rastreamento calcule as correções. Uma taxa de atualização de 1 Hz significa que o sistema só sabe onde a câmera está uma vez por segundo. A uma velocidade de $400^{\circ}/s$, a câmera pode viajar $400^{\circ}$ entre as atualizações. Isso é inútil para rastreamento.
Câmeras PTZ industriais de nossa fábrica suportam taxas de consulta de posição de 10 Hz ou mais. Isso fornece ao algoritmo de rastreamento dados suficientes para fazer correções suaves e precisas em tempo real.
Autocalibração e Correção de Deriva
Mesmo o melhor hardware sofre deriva após meses de operação contínua. Recomendo configurar uma rotina de autocalibração agendada:
- A cada 24 horas, comande a câmera para um preset conhecido (por exemplo, um marco com coordenadas conhecidas).
- Use análise de vídeo para detectar o marco no quadro.
- Meça o deslocamento de pixels do centro do quadro.
- Calcule a correção angular e aplique-a como um deslocamento em seu software de controle.
Essa abordagem de circuito fechado mantém seu sistema preciso ao longo de anos de operação sem qualquer intervenção manual.
O Posicionamento Absoluto é suportado por todas as principais marcas de VMS como Genetec e Exacq?
Sei que essa pergunta tira o sono dos integradores. Você escolhe uma câmera, a instala no local e, em seguida, descobre que seu VMS não consegue enviar comandos absolutos para ela. Agora você tem uma câmera de R$ 3.000 que só faz controle relativo por joystick. Já vi isso acontecer muitas vezes.
A maioria das principais plataformas VMS — incluindo Genetec Security Center, Exacq exacqVision, Milestone XProtect e até opções de código aberto como Blue Iris — suporta comandos ONVIF AbsoluteMove. No entanto, o nível de suporte varia. Algumas plataformas expõem controle total de coordenadas em sua interface do usuário, enquanto outras o suportam apenas por meio de sua API ou SDK. Sempre teste a versão específica do VMS com seu modelo de câmera antes de se comprometer com uma implantação grande.
 Compatibilidade VMS posicionamento absoluto Genetec Exacq Milestone
Compatibilidade VMS posicionamento absoluto Genetec Exacq Milestone
A Realidade da Compatibilidade
No papel, todo VMS que afirma conformidade com o Perfil S do ONVIF deve suportar MovimentoAbsoluto. Na prática, existem lacunas. Algumas plataformas VMS implementam apenas o estilo joystick MovimentoContínuo e MovimentoRelativo comandos porque são mais fáceis de incorporar a uma interface de usuário. O MovimentoAbsoluto comando exige que o VMS mantenha um sistema de coordenadas, exiba valores de ângulo e lide com a conversão de normalizado para graus — o que é mais trabalho de desenvolvimento.
Análise Plataforma por Plataforma
Aqui está o que eu vi em testes do mundo real:
Genetec Security Center7 suporta posicionamento absoluto por meio de seu módulo Map. Você pode colocar câmeras em um mapa, definir seu campo de visão e clicar para rastrear. O sistema envia comandos ONVIF MovimentoAbsoluto por baixo dos panos. Isso funciona bem, mas você precisa do nível de licença correto — a licença básica não inclui controle PTZ baseado em mapa.
Milestone XProtect9 tem forte suporte ONVIF e expõe posicionamento absoluto por meio de seu Smart Client e MIP SDK. Se você estiver criando uma integração personalizada — digamos, vinculando um sistema de radar ao Milestone — você pode usar o SDK para enviar comandos absolutos programaticamente. A interface do usuário padrão também exibe coordenadas Pan/Tilt/Zoom ao passar o mouse sobre o painel de controle PTZ.
Exacq exacqVision8 suporta posicionamento absoluto ONVIF, mas a interface do usuário é mais limitada. Você pode definir predefinições usando coordenadas absolutas, mas a entrada de coordenadas em tempo real não é tão fluida quanto Genetec ou Milestone. Para a maioria dos projetos, isso é bom — você define suas predefinições durante a comissionamento e, em seguida, as aciona por meio de alarmes.
Íris Azul10 é popular entre integradores menores e usuários finais com conhecimento técnico. Ele suporta ONVIF e pode enviar comandos absolutos por meio de sua API HTTP. A interface do usuário do desktop é básica, mas a API é poderosa. Muitos dos meus clientes usam Blue Iris com n8n ou Node-RED para criar fluxos de trabalho de automação personalizados.
O Que Testar Antes de Comprar
Antes de se comprometer com uma combinação de câmera-VMS para um grande projeto, recomendo executar estes três testes:
Teste 1: AbsoluteMove Round-Trip
Envie um MovimentoAbsoluto comando do VMS para uma coordenada específica. Em seguida, consulte a posição da câmera através do ONVIF ObterStatus. Compare a posição comandada com a posição reportada. Elas devem corresponder dentro de $\pm 0.1^{\circ}$.
Teste 2: Precisão de Preset Após Ciclo de Energia
Defina cinco presets usando coordenadas absolutas. Desligue e ligue a câmera. Chame cada preset e verifique se a câmera retorna à mesma posição exata. Se houver um desvio superior a $0.3^{\circ}$, a câmera provavelmente usa encoders incrementais e não é adequada para fluxos de trabalho de posicionamento absoluto.
Teste 3: Velocidade de Execução do AbsoluteMove
Comande a câmera para se mover de Pan $0^{\circ}$ para Pan $180^{\circ}$. Meça o tempo. Uma boa PTZ industrial deve completar isso em menos de 2 segundos na velocidade máxima de giro ($400^{\circ}/s$ ou superior). Se demorar mais, o motor ou o pipeline de comunicação tem um gargalo.
A Vantagem OEM/ODM
Uma coisa que sempre digo aos integradores: se o seu VMS tiver requisitos específicos sobre como os comandos PTZ são formatados, podemos personalizar o firmware da câmera para corresponder. Como um fabricante liderado por P&D, controlamos toda a pilha de firmware. Podemos ajustar o formato de resposta ONVIF, adicionar endpoints CGI personalizados ou até mesmo implementar protocolos proprietários, se o seu projeto exigir. Esta é a vantagem de trabalhar diretamente com uma fábrica em vez de passar por uma empresa comercial que não pode alterar uma única linha de código.
Conclusão
O posicionamento absoluto transforma sua câmera PTZ de uma ferramenta manual em um sensor programável. Com os encoders, protocolos e integração VMS corretos, você obtém controle preciso, repetível e automatizado que o movimento relativo simplesmente não pode oferecer.
1. Aprenda como o posicionamento absoluto permite movimentos de câmera precisos e repetíveis para coordenadas exatas. ︎↩︎ 2. Encoders absolutos fornecem feedback de posição imediato e sem desvios, sem necessidade de re-homing. ︎↩︎ 3. Encoders incrementais perdem a posição em caso de perda de energia e exigem re-homing, limitando a confiabilidade da automação. ︎↩︎ 4. Aprenda como os sistemas de informação geográfica são usados com câmeras PTZ para rastreamento baseado em coordenadas. ︎↩︎ 5. Pelco-D é um protocolo RS-485 amplamente utilizado que suporta comandos de posicionamento PTZ absoluto. ︎↩︎ 6. APIs HTTP permitem o envio de comandos PTZ absolutos através de simples requisições de URL em redes IP. ︎↩︎ 7. O VMS da Genetec suporta controle PTZ absoluto através de seu módulo de Mapa e integração ONVIF. ︎↩︎ 8. O ExacqVision suporta posicionamento absoluto ONVIF para controle PTZ baseado em presets. ︎↩︎ 9. O Milestone XProtect expõe o posicionamento PTZ absoluto através do seu Smart Client e MIP SDK. ︎↩︎ 10. O Blue Iris suporta comandos absolutos ONVIF via sua API HTTP para fluxos de trabalho de automação personalizados. ︎↩︎ 11. O Perfil S do ONVIF define streaming de vídeo básico e controle PTZ, incluindo AbsoluteMove. ︎↩︎ 12. O Perfil T do ONVIF estende o Perfil S com recursos avançados como suporte a áudio e metadados. ︎↩︎ 13. Azimute é o rolamento da bússola usado para calcular o ângulo de pan de uma câmera para um alvo GIS. ︎↩︎ 14. A compensação de folga elimina o jogo da engrenagem para um posicionamento PTZ preciso, especialmente ao reverter a direção. ︎↩︎