
Ho visto integratori perdere ore a spostare una PTZ a sinistra, a destra, in alto, in basso, cercando di raggiungere l'angolazione esatta di cui hanno bisogno. Esiste un modo migliore.
Sì, puoi ottenere il controllo del posizionamento assoluto1 su telecamere PTZ di livello industriale. Invece di inviare comandi “sposta a sinistra” o “sposta a destra”, invii coordinate esatte in gradi, come Pan 180°, Tilt 45°, e la telecamera scatta istantaneamente in quella posizione precisa. Ciò richiede hardware con encoder assoluti e supporto del protocollo tramite ONVIF, Pelco-D5, o HTTP API6.
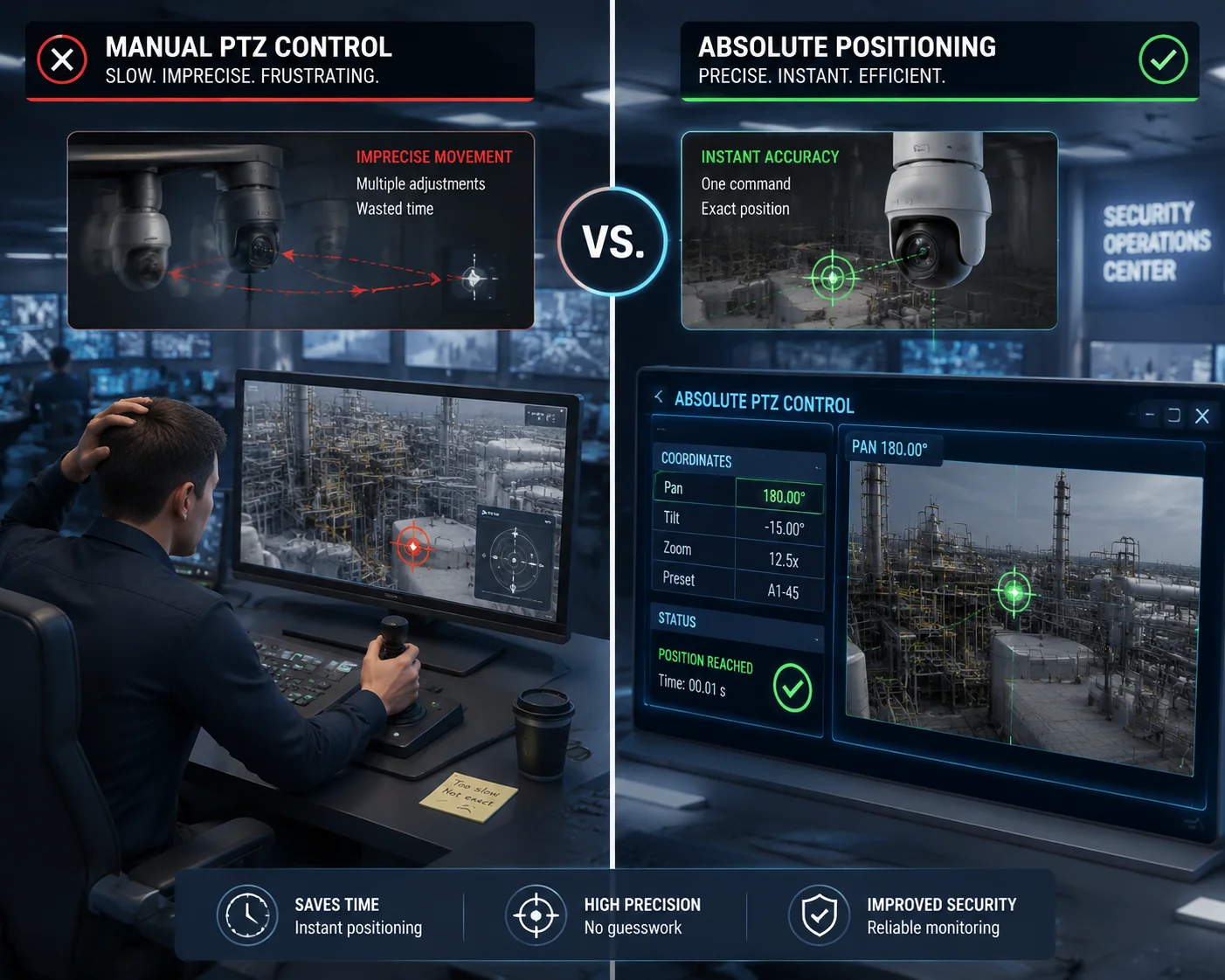 Controllo del posizionamento assoluto della telecamera PTZ rispetto al movimento relativo
Controllo del posizionamento assoluto della telecamera PTZ rispetto al movimento relativo
Il posizionamento assoluto cambia tutto nel modo in cui progetti un sistema di sorveglianza. È il fondamento per il tracciamento radar, l'integrazione con mappe GIS e la risposta automatizzata guidata dall'IA. Di seguito, analizzo le domande chiave che gli integratori mi pongono più spesso su questa funzionalità e ti fornisco le risposte tecniche reali.
Indice dei contenuti
Posso comandare alla PTZ di andare esattamente a Pan 180°, Tilt 45° tramite una stringa ONVIF?
Ricevo questa domanda quasi ogni settimana da system integrator. Vogliono sapere se possono inviare un comando e far sì che la telecamera raggiunga una coordinata esatta. La risposta è importante perché il loro intero flusso di lavoro di automazione dipende da essa.
Sì, puoi. Profilo ONVIF S11 e ONVIF Profilo T12 supportano entrambi il comando AbsoluteMove Invii una richiesta SOAP con valori normalizzati di Pan, Tilt e Zoom, e la telecamera si sposta direttamente in quella posizione esatta. Il requisito fondamentale è che l'hardware della tua PTZ deve avere encoder assoluti2 integrati nei motori.
 Controllo telecamera PTZ comando ONVIF AbsoluteMove
Controllo telecamera PTZ comando ONVIF AbsoluteMove
Come funziona il comando AbsoluteMove di ONVIF
Il protocollo ONVIF utilizza valori normalizzati invece di numeri grezzi in gradi. Ciò significa che i valori di Pan e Tilt vanno da $-1.0$ a $+1.0$, e lo Zoom va da $0.0$ a $1.0$. Il tuo VMS o piattaforma di automazione converte i gradi del mondo reale in questi valori normalizzati prima di inviare il comando.
Ecco come appare una tipica richiesta ONVIF comando AbsoluteMove SOAP in pratica:
<AbsoluteMove xmlns="http://www.onvif.org/ver20/ptz/wsdl">
<ProfileToken>MainStream</ProfileToken>
<Position>
<PanTilt x="0.0" y="0.25" />
<Zoom x="0.5" />
</Position>
</AbsoluteMove>In questo esempio, x="0.0" corrisponde a Pan $180^{\circ}$ (il punto medio di un intervallo di $360^{\circ}$), e y="0.25" corrisponde a Tilt $45^{\circ}$ (un quarto della strada verso l'alto dal centro). La mappatura esatta dipende dal sistema di coordinate della telecamera, ma la logica è la stessa in tutti i dispositivi conformi a ONVIF.
L'hardware dietro il comando
Inviare il comando è la parte facile. La parte difficile è assicurarsi che la telecamera arrivi effettivamente dove le hai detto di andare. Questo si riduce a un componente: l' encoder assoluto.
Ci sono due tipi di encoder nei motori PTZ:
| Caratteristica | Encoder Incrementale | Encoder Assoluto |
|---|---|---|
| Posizione all'accensione | Sconosciuta — deve ri-autenticarsi | Riconosciuto immediatamente |
| Deriva nel tempo | Accumula errori | Nessuna deriva |
| Costo | Più basso | Più alto |
| Caso d'uso | PTZ Consumer, preset di base | PTZ Industriale, integrazione radar |
| Precisione | \pm 1.0^{\circ} tipico | \pm 0.1^{\circ} o migliore |
Una telecamera con encoder incrementali3 può comunque accettare un comando AbsoluteMove comando. Ma dopo un ciclo di spegnimento, perde il suo punto di riferimento. Deve eseguire una routine di “homing” — ruotando fino a un arresto fisico — prima di sapere di nuovo dov'è. Durante quel periodo, il tuo sistema di automazione è cieco.
Un encoder assoluto conosce la sua posizione esatta nel momento in cui viene alimentato. Nessun homing. Nessun ritardo. Ecco perché consiglio sempre encoder assoluti per qualsiasi progetto che coinvolga il tracciamento automatizzato o l'integrazione GIS.
Formula di conversione: Gradi in Valori Normalizzati
Se la tua piattaforma di automazione funziona in gradi ma ONVIF necessita di valori normalizzati, ecco la matematica di base:
x_{pan} = \frac{(\text{Pan Target} – 180)}{180}
y_{tilt} = \frac{\text{Tilt Target}}{90}
Quindi per Pan 180^{\circ}, Tilt 45^{\circ}:
- x_{pan} = \frac{(180 – 180)}{180} = 0.0
- y_{tilt} = \frac{45}{90} = 0.5
Questa formula funziona per la maggior parte delle telecamere, ma controlla sempre la mappatura delle coordinate del produttore. Alcune telecamere definiscono 0^{\circ} come Nord, altre lo definiscono come posizione di accensione.
La funzionalità di posizionamento assoluto consente una migliore integrazione con le mappe GIS?
Ho visto progetti fallire perché l'integratore non è riuscito a collegare il proprio software di mappatura alla telecamera PTZ. Avevano un bellissimo dashboard GIS, ma la telecamera rimaneva lì ferma senza fare nulla quando scattava un allarme. È un doloroso spreco di budget.
Il posizionamento assoluto è la chiave che sblocca il vero integrazione GIS4. Quando la tua telecamera segnala i suoi angoli esatti di Pan e Tilt, il tuo software GIS può calcolare esattamente cosa sta guardando la telecamera sulla mappa. E quando fai clic su un punto sulla mappa, il software può convertire quella coordinata GPS in un comando Pan/Tilt e inviare la telecamera lì istantaneamente.
 Integrazione mappa GIS con posizionamento assoluto PTZ
Integrazione mappa GIS con posizionamento assoluto PTZ
La matematica dietro la conversione GIS-PTZ
Per collegare una mappa GIS a una telecamera PTZ, sono necessari tre elementi di informazione:
- Posizione GPS della telecamera — latitudine e longitudine della posizione di montaggio della telecamera.
- Orientamento di montaggio della telecamera — quale direzione della bussola indica la telecamera a Pan $0^{\circ}$.
- Posizione GPS del bersaglio — il punto sulla mappa che si desidera che la telecamera guardi.
Con questi tre input, si calcola l' azimut13 (cuscinetto della bussola) dalla telecamera al bersaglio:
$$\text{Azimut} = \arctan2\left(\sin(\Delta\lambda) \cdot \cos(\phi_2),\ \cos(\phi_1) \cdot \sin(\phi_2) – \sin(\phi_1) \cdot \cos(\phi_2) \cdot \cos(\Delta\lambda)\right)$$
Dove $\phi_1$ è la latitudine della telecamera, $\phi_2$ è la latitudine del bersaglio e $\Delta\lambda$ è la differenza di longitudine. Il risultato fornisce l'angolo di Pan. Il Tilt viene calcolato in base alla distanza e alla differenza di altezza.
Perché il movimento relativo interrompe l'integrazione GIS
Con il movimento relativo, puoi solo dire “gira a sinistra di 5 gradi”. Ma il software GIS non ragiona in termini relativi. Ragiona in coordinate assolute. Se il sistema GIS calcola che un bersaglio si trova all'azimut $237^{\circ}$, deve inviare Pan = 237° direttamente. Non esiste un modo affidabile per farlo con comandi relativi perché:
- Non si conosce con precisione la posizione attuale della telecamera.
- La latenza di rete rende inaffidabili i comandi di “stop”.
- Piccoli errori si accumulano su più movimenti.
Architettura di integrazione GIS del mondo reale
Ecco come appare uno stack completo di integrazione GIS-PTZ:
| Strato | Componente | Ruolo |
|---|---|---|
| Rilevamento | Radar / Sensore Perimetrale | Rileva l'intrusione, emette coordinate GPS |
| Elaborazione | Server GIS (es. ArcGIS, QGIS) | Converte le coordinate GPS in angolo di azimut della telecamera |
| Comando | Client ONVIF / API HTTP | Invia AbsoluteMove alla telecamera PTZ |
| Feedback | Query Stato PTZ | Conferma che la telecamera ha raggiunto la posizione target |
| Visualizzazione | VMS / Dashboard Web | Mostra video in tempo reale con sovrapposizione mappa |
Il ciclo di feedback è fondamentale. Dopo aver inviato il comando, il tuo sistema dovrebbe interrogare lo stato PTZ per confermare che sia effettivamente arrivato all'angolo target. È qui che gli encoder assoluti dimostrano il loro valore: la posizione segnalata corrisponde alla realtà.
Suggerimenti pratici per il dispiegamento sul campo
Nella mia esperienza di lavoro con integratori su progetti esterni, ci sono alcune cose che possono compromettere l'accuratezza del tuo GIS-to-PTZ:
- Oscillazione del palo dovuta al vento. Un palo di 10 metri con vento a 30 mph può oscillare da $1^{\circ}$ a $2^{\circ}$. A una distanza di 500 metri, ciò si traduce in un errore a terra da 9 a 17 metri.
- Declinazione magnetica. Se calibri il Nord della tua telecamera con una bussola, ricorda che il Nord magnetico non è il vero Nord. In Texas, la differenza può essere da $4^{\circ}$ a $8^{\circ}$.
- Allineamento di montaggio. Anche un errore di $0.5^{\circ}$ nel modo in cui la telecamera è montata sulla staffa si ripercuoterà su ogni singolo comando GIS.
Raccomando sempre di fare una calibrazione sul campo dopo l'installazione. Scegli tre punti di riferimento noti, annota le loro coordinate GPS, comanda la telecamera verso ciascuno di essi e misura lo scostamento. Quindi applica un fattore di correzione nel tuo software.
Quanto è accurato il ritorno delle coordinate basato sui gradi quando interrogo lo stato della PTZ?
Ho avuto clienti che mi hanno detto che le loro precedenti telecamere PTZ segnalavano un angolo ma in realtà puntavano altrove. Quando si costruisce un sistema automatizzato, dati di posizione errati sono peggio di nessun dato.
Sulle telecamere PTZ di livello industriale con encoder assoluti, l'accuratezza della query di posizione è tipicamente entro $\pm 0.1^{\circ}$. È possibile interrogare i valori correnti di Pan, Tilt e Zoom in qualsiasi momento tramite ONVIF OttieniStato o chiamate API HTTP. I valori restituiti riflettono la posizione fisica effettiva dei motori, non solo l'ultima posizione comandata.
 Accuratezza della query di stato PTZ restituzione coordinate basata su gradi
Accuratezza della query di stato PTZ restituzione coordinate basata su gradi
Come funzionano le query di posizione
Quando invii un OttieniStato tramite ONVIF, la telecamera legge i valori dell'encoder correnti e li converte in coordinate normalizzate. La risposta è simile a questa:
<GetStatusResponse>
<PTZStatus>
<Position>
<PanTilt x="-0.333" y="0.125" />
<Zoom x="0.75" />
</Position>
<MoveStatus>
<PanTilt>IDLE</PanTilt>
<Zoom>IDLE</Zoom>
</MoveStatus>
</PTZStatus>
</GetStatusResponse>Il StatoMovimento il campo ti dice se la telecamera si sta ancora muovendo o ha raggiunto la sua destinazione. Questo è importante per l'automazione: non dovresti acquisire uno snapshot finché lo stato non mostra INATTIVO.
Fonti di errore di posizione
Anche con gli encoder assoluti, ci sono fattori che influiscono sull'accuratezza:
Gioco meccanico
Il gioco è il piccolo spazio tra gli ingranaggi. Quando il motore inverte la direzione, gli ingranaggi devono “colmare” questo spazio prima che la telecamera inizi effettivamente a muoversi. L'encoder potrebbe riportare correttamente la posizione del motore, ma l'obiettivo della telecamera punta leggermente fuori posto a causa del gioco degli ingranaggi.
Le buone telecamere PTZ includono compensazione del gioco14 nel loro firmware. Ciò significa che il motore supera intenzionalmente il bersaglio e poi si avvicina ad esso dalla stessa direzione ogni volta, eliminando l'errore di gioco degli ingranaggi.
Effetti della temperatura
Gli ingranaggi metallici si espandono e si contraggono con la temperatura. In un'estate texana, l'alloggiamento della telecamera può raggiungere $70^{\circ}C$ internamente. Questo può spostare l'ingranamento di una piccola quantità. Su una rotazione di $360^{\circ}$, l'errore cumulativo potrebbe raggiungere $0.2^{\circ}$ - $0.3^{\circ}$.
Confronto dell'accuratezza per grado della telecamera
| Grado della telecamera | Tipo di encoder | Accuratezza tipica | Frequenza di aggiornamento della query di posizione |
|---|---|---|---|
| Consumatore / Prosumer | Incrementale | $\pm 1,0^{\circ}$ a $\pm 2,0^{\circ}$ | 1 Hz |
| Commercial di fascia media | Sensore incrementale + Home | $\pm 0,5^{\circ}$ | 2-5 Hz |
| Grado industriale / militare | Assoluto (multigiro) | $\pm 0,05^{\circ}$ a $\pm 0,1^{\circ}$ | 10+ Hz |
Perché la velocità di interrogazione è importante
Se si esegue il tracciamento automatico basato su radar, la telecamera deve segnalare la propria posizione abbastanza velocemente affinché l'algoritmo di tracciamento possa calcolare le correzioni. Una frequenza di aggiornamento di 1 Hz significa che il sistema sa dove si trova la telecamera solo una volta al secondo. A una velocità di rotazione di $400^{\circ}/s$, la telecamera può percorrere $400^{\circ}$ tra un aggiornamento e l'altro. Ciò è inutile per il tracciamento.
Le telecamere PTZ industriali della nostra fabbrica supportano frequenze di interrogazione della posizione di 10 Hz o superiori. Ciò fornisce all'algoritmo di tracciamento dati sufficienti per apportare correzioni fluide e accurate in tempo reale.
Autocalibrazione e correzione della deriva
Anche l'hardware migliore subisce derive dopo mesi di funzionamento continuo. Raccomando di impostare una routine di autocalibrazione programmata:
- Ogni 24 ore, comandare alla telecamera di spostarsi su un preset noto (ad esempio, un punto di riferimento con coordinate note).
- Utilizzare l'analisi video per rilevare il punto di riferimento nell'inquadratura.
- Misurare lo spostamento dei pixel dal centro dell'inquadratura.
- Calcolare la correzione angolare e applicarla come offset nel software di controllo.
Questo approccio a circuito chiuso mantiene il tuo sistema accurato per anni di funzionamento senza alcun intervento manuale.
Il posizionamento assoluto è supportato da tutti i principali marchi VMS come Genetec ed Exacq?
So che questa domanda tiene svegli gli integratori di notte. Scegli una telecamera, la installi in loco e poi scopri che il tuo VMS non può inviarle comandi assoluti. Ora hai una telecamera da 3000€ che fa solo controllo joystick relativo. Ho visto succedere questo troppe volte.
La maggior parte delle principali piattaforme VMS — tra cui Genetec Security Center, Exacq exacqVision, Milestone XProtect e persino opzioni open-source come Blue Iris — supportano i comandi ONVIF AbsoluteMove. Tuttavia, il livello di supporto varia. Alcune piattaforme espongono il controllo completo delle coordinate nella loro interfaccia utente, mentre altre lo supportano solo tramite la loro API o SDK. Testa sempre la versione specifica del VMS con il tuo modello di telecamera prima di impegnarti in un'ampia distribuzione.
 Compatibilità VMS posizionamento assoluto Genetec Exacq Milestone
Compatibilità VMS posizionamento assoluto Genetec Exacq Milestone
La realtà della compatibilità
Sulla carta, ogni VMS che dichiara la conformità a ONVIF Profile S dovrebbe supportare comando AbsoluteMove. In pratica, ci sono delle lacune. Alcune piattaforme VMS implementano solo lo stile joystick MovimentoContinuo e MovimentoRelativo comandi perché sono più semplici da integrare in un'interfaccia utente. Il comando AbsoluteMove comando richiede al VMS di mantenere un sistema di coordinate, visualizzare i valori angolari e gestire la conversione da normalizzato a gradi — il che richiede più lavoro di sviluppo.
Analisi per Piattaforma
Ecco cosa ho visto nei test sul campo:
Genetec Security Center7 supporta il posizionamento assoluto tramite il suo modulo Mappa. Puoi posizionare le telecamere su una mappa, definire il loro campo visivo e fare clic per tracciare. Il sistema invia comandi ONVIF comando AbsoluteMove comandi sotto il cofano. Questo funziona bene, ma è necessaria la giusta licenza — la licenza di base non include il controllo PTZ basato su mappa.
Milestone XProtect9 ha un forte supporto ONVIF ed espone il posizionamento assoluto tramite il suo Smart Client e MIP SDK. Se stai creando un'integrazione personalizzata — ad esempio, collegando un sistema radar a Milestone — puoi utilizzare l'SDK per inviare comandi assoluti programmaticamente. L'interfaccia utente standard mostra anche le coordinate Pan/Tilt/Zoom quando passi il mouse sul pannello di controllo PTZ.
Exacq exacqVision8 supporta il posizionamento assoluto ONVIF, ma l'interfaccia utente è più limitata. Puoi impostare preset utilizzando coordinate assolute, ma l'inserimento di coordinate in tempo reale non è fluido come con Genetec o Milestone. Per la maggior parte dei progetti, questo va bene — imposti i tuoi preset durante la messa in servizio e poi li attivi tramite allarmi.
Iris blu10 è popolare tra i piccoli integratori e gli utenti finali esperti di tecnologia. Supporta ONVIF e può inviare comandi assoluti tramite la sua API HTTP. L'interfaccia utente desktop è basilare, ma l'API è potente. Molti miei clienti utilizzano Blue Iris con n8n o Node-RED per creare flussi di lavoro di automazione personalizzati.
Cosa testare prima di acquistare
Prima di impegnarti in una combinazione telecamera-VMS per un progetto di grandi dimensioni, ti consiglio di eseguire questi tre test:
Test 1: AbsoluteMove Round-Trip
Invia un comando AbsoluteMove comando dal VMS a una coordinata specifica. Quindi interroga la posizione della telecamera tramite ONVIF OttieniStato. Confronta la posizione comandata con la posizione riportata. Dovrebbero corrispondere entro \pm 0,1^{\circ}.
Test 2: Precisione Preset dopo Ciclo di Alimentazione
Imposta cinque preset utilizzando coordinate assolute. Esegui un ciclo di alimentazione della telecamera. Chiama ciascun preset e verifica se la telecamera ritorna esattamente nella stessa posizione. Se la deriva supera 0,3^{\circ}, è probabile che la telecamera utilizzi encoder incrementali e non sia adatta per flussi di lavoro di posizionamento assoluto.
Test 3: Velocità di Esecuzione AbsoluteMove
Comanda alla telecamera di spostarsi da Pan 0^{\circ} a Pan 180^{\circ}. Misura il tempo. Una buona PTZ industriale dovrebbe completare questa operazione in meno di 2 secondi alla massima velocità di traslazione (400^{\circ}/s o superiore). Se richiede più tempo, il motore o la pipeline di comunicazione presentano un collo di bottiglia.
Il Vantaggio OEM/ODM
Una cosa che dico sempre agli integratori: se il tuo VMS ha requisiti specifici su come vengono formattati i comandi PTZ, possiamo personalizzare il firmware della telecamera per adattarlo. Essendo un produttore guidato dalla R&S, controlliamo l'intero stack firmware. Possiamo regolare il formato di risposta ONVIF, aggiungere endpoint CGI personalizzati o persino implementare protocolli proprietari se il tuo progetto lo richiede. Questo è il vantaggio di lavorare direttamente con una fabbrica invece di passare attraverso una società commerciale che non può modificare una singola riga di codice.
Conclusione
Il posizionamento assoluto trasforma la tua telecamera PTZ da uno strumento manuale a un sensore programmabile. Con gli encoder, i protocolli e l'integrazione VMS giusti, ottieni un controllo preciso, ripetibile e automatizzato che il movimento relativo semplicemente non può fornire.
1. Scopri come il posizionamento assoluto consente movimenti precisi e ripetibili della telecamera verso coordinate esatte. ︎↩︎ 2. Gli encoder assoluti forniscono un feedback di posizione immediato e senza deriva senza necessità di re-homing. ︎↩︎ 3. Gli encoder incrementali perdono la posizione in caso di interruzione di corrente e richiedono il re-homing, limitando l'affidabilità dell'automazione. ︎↩︎ 4. Scopri come i sistemi informativi geografici vengono utilizzati con le telecamere PTZ per il tracciamento basato su coordinate. ︎↩︎ 5. Pelco-D è un protocollo RS-485 ampiamente utilizzato che supporta comandi di posizionamento PTZ assoluti. ︎↩︎ 6. Le API HTTP consentono l'invio di comandi PTZ assoluti tramite semplici richieste URL su reti IP. ︎↩︎ 7. Il VMS di Genetec supporta il controllo PTZ assoluto tramite il suo modulo Mappa e l'integrazione ONVIF. ︎↩︎ 8. ExacqVision supporta il posizionamento assoluto ONVIF per il controllo PTZ basato su preset. ︎↩︎ 9. Milestone XProtect espone il posizionamento PTZ assoluto tramite il suo Smart Client e MIP SDK. ︎↩︎ 10. Blue Iris supporta comandi assoluti ONVIF tramite la sua API HTTP per flussi di lavoro di automazione personalizzati. ︎↩︎ 11. ONVIF Profile S definisce lo streaming video di base e il controllo PTZ, incluso AbsoluteMove. ︎↩︎ 12. ONVIF Profile T estende il Profile S con funzionalità avanzate come il supporto audio e metadati. ︎↩︎ 13. L'azimut è il rilevamento della bussola utilizzato per calcolare l'angolo di pan da una telecamera a un obiettivo GIS. ︎↩︎ 14. La compensazione del gioco elimina il gioco degli ingranaggi per un posizionamento PTZ preciso, specialmente quando si inverte la direzione. ︎↩︎