
He visto a integradores perder horas moviendo una PTZ a la izquierda, derecha, arriba, abajo, tratando de alcanzar el ángulo exacto que necesitan. Hay una mejor manera.
Sí, puedes lograr control de posicionamiento absoluto1 en cámaras PTZ de grado industrial. En lugar de enviar comandos de “mover a la izquierda” o “mover a la derecha”, envías coordenadas exactas en grados, como Pan 180°, Tilt 45°, y la cámara se ajusta a esa posición precisa al instante. Esto requiere hardware con codificadores absolutos y soporte de protocolo a través de ONVIF, Pelco-D5, o API HTTP6.
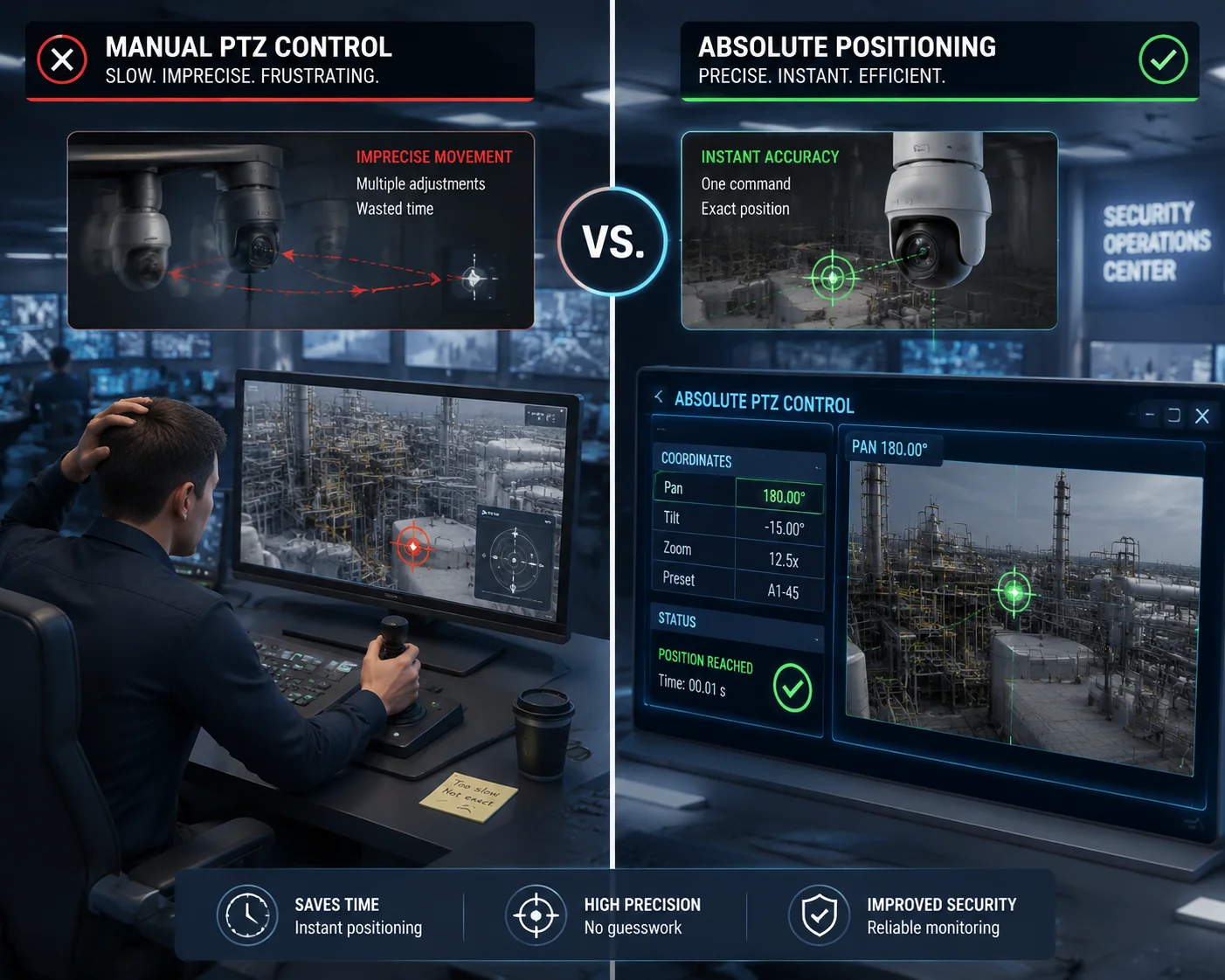 Control de posicionamiento absoluto de cámaras PTZ vs. movimiento relativo
Control de posicionamiento absoluto de cámaras PTZ vs. movimiento relativo
El posicionamiento absoluto cambia todo sobre cómo diseñas un sistema de vigilancia. Es la base para el seguimiento por radar, la integración de mapas GIS y la respuesta automatizada impulsada por IA. A continuación, desgloso las preguntas clave que los integradores me hacen con más frecuencia sobre esta función y te doy las respuestas técnicas reales.
Índice
¿Puedo ordenar a la PTZ que vaya exactamente a Pan 180°, Tilt 45° a través de una cadena ONVIF?
Recibo esta pregunta casi todas las semanas de los integradores de sistemas. Quieren saber si pueden enviar un solo comando y que la cámara aterrice en una coordenada exacta. La respuesta es importante porque todo su flujo de trabajo de automatización depende de ello.
Sí, puedes. Perfil S de ONVIF11 y ONVIF Perfil T12 ambos admiten el MovimientoAbsoluto comando. Envías una solicitud SOAP con valores normalizados de Pan, Tilt y Zoom, y la cámara se mueve directamente a esa posición exacta. El requisito clave es que tu hardware PTZ debe tener codificadores absolutos2 integrados en los motores.
 Control de cámara PTZ con comando ONVIF AbsoluteMove
Control de cámara PTZ con comando ONVIF AbsoluteMove
Cómo funciona el comando AbsoluteMove de ONVIF
El protocolo ONVIF utiliza valores normalizados en lugar de números brutos de grados. Esto significa que los valores de Pan y Tilt varían de -1.0 a +1.0, y el Zoom varía de 0.0 a 1.0. Su VMS o plataforma de automatización convierte los grados del mundo real en estos valores normalizados antes de enviar el comando.
Así es como se ve una solicitud SOAP típica de ONVIF en la práctica: MovimientoAbsoluto solicitud SOAP típica de ONVIF en la práctica:
<AbsoluteMove xmlns="http://www.onvif.org/ver20/ptz/wsdl">
<ProfileToken>MainStream</ProfileToken>
<Position>
<PanTilt x="0.0" y="0.25" />
<Zoom x="0.5" />
</Position>
</AbsoluteMove>En este ejemplo, x="0.0" se mapea a Pan 180° (el punto medio de un rango de 360°), y y="0.25" se mapea a Tilt 45° (un cuarto del camino hacia arriba desde el centro). El mapeo exacto depende del sistema de coordenadas de la cámara, pero la lógica es la misma en todos los dispositivos compatibles con ONVIF.
El hardware detrás del comando
Enviar el comando es la parte fácil. La parte difícil es asegurarse de que la cámara realmente aterrice donde usted le dijo que lo hiciera. Esto se reduce a un componente: el codificador absoluto.
Hay dos tipos de codificadores en los motores PTZ:
| Característica | Codificador Incremental | Codificador Absoluto |
|---|---|---|
| Posición al encender | Desconocida — debe volver a la posición inicial | Conocido inmediatamente |
| Deriva temporal | Acumula error | Sin deriva |
| Coste | Baja | Más alto |
| Caso práctico | PTZ de consumidor, preajustes básicos | PTZ industrial, integración de radar |
| Precisión | $\pm 1.0^{\circ}$ típico | $\pm 0.1^{\circ}$ o mejor |
Una cámara con codificadores incrementales3 aún puede aceptar un MovimientoAbsoluto comando. Pero después de un ciclo de energía, pierde su punto de referencia. Tiene que ejecutar una rutina de “homing” — girando hasta un tope físico — antes de saber dónde está de nuevo. Durante ese tiempo, su sistema de automatización está ciego.
Un codificador absoluto conoce su posición exacta en el momento en que se enciende. Sin homing. Sin demora. Es por eso que siempre recomiendo codificadores absolutos para cualquier proyecto que involucre seguimiento automatizado o integración GIS.
Fórmula de conversión: Grados a valores normalizados
Si su plataforma de automatización funciona en grados pero ONVIF necesita valores normalizados, aquí están las matemáticas básicas:
$$x_{pan} = \frac{(\text{Pan objetivo} – 180)}{180}$$
$$y_{tilt} = \frac{\text{Inclinación objetivo}}{90}$$
Así que para Pan $180^{\circ}$, Inclinación $45^{\circ}$:
- $x_{pan} = \frac{(180 – 180)}{180} = 0.0$
- $y_{tilt} = \frac{45}{90} = 0.5$
Esta fórmula funciona para la mayoría de las cámaras, pero siempre verifique el mapeo de coordenadas del fabricante. Algunas cámaras definen $0^{\circ}$ como Norte, otras lo definen como la posición de encendido.
¿La función de Posicionamiento Absoluto permite una mejor integración con los mapas GIS?
He visto proyectos fracasar porque el integrador no pudo vincular su software de mapas con la cámara PTZ. Tenían un hermoso panel de control GIS, pero la cámara simplemente estaba allí sin hacer nada cuando se activaba una alarma. Eso es un doloroso desperdicio de presupuesto.
El posicionamiento absoluto es la clave que desbloquea el verdadero integración GIS4. Cuando su cámara informa sus ángulos exactos de paneo e inclinación, su software GIS puede calcular exactamente lo que la cámara está viendo en el mapa. Y cuando hace clic en un punto del mapa, el software puede convertir esa coordenada GPS en un comando de paneo/inclinación y enviar la cámara allí instantáneamente.
 Integración de mapas GIS con posicionamiento absoluto PTZ
Integración de mapas GIS con posicionamiento absoluto PTZ
Las matemáticas detrás de la conversión GIS a PTZ
Para vincular un mapa GIS a una cámara PTZ, necesita tres piezas de información:
- Ubicación GPS de la cámara — latitud y longitud de la posición de montaje de la cámara.
- Orientación de montaje de la cámara — hacia qué dirección de la brújula apunta la cámara a Pan $0^{\circ}$.
- Ubicación GPS del objetivo — el punto en el mapa hacia el que desea que mire la cámara.
Con estas tres entradas, calcula el azimut13 (rumbo de la brújula) desde la cámara hasta el objetivo:
$$\text{Azimut} = \arctan2\left(\sin(\Delta\lambda) \cdot \cos(\phi_2),\ \cos(\phi_1) \cdot \sin(\phi_2) – \sin(\phi_1) \cdot \cos(\phi_2) \cdot \cos(\Delta\lambda)\right)$$
Donde $\phi_1$ es la latitud de la cámara, $\phi_2$ es la latitud del objetivo y $\Delta\lambda$ es la diferencia de longitud. El resultado le da el ángulo de paneo. La inclinación se calcula en función de la distancia y la diferencia de altura.
Por qué el movimiento relativo rompe la integración GIS
Con el movimiento relativo, solo puede decir “gire 5 grados a la izquierda”. Pero el software GIS no piensa en términos relativos. Piensa en coordenadas absolutas. Si el sistema GIS calcula que un objetivo está en el azimut $237^{\circ}$, necesita enviar Pan = 237° directamente. No hay forma fiable de hacerlo con comandos relativos porque:
- No conoce la posición actual de la cámara con precisión.
- La latencia de la red hace que los comandos de “parada” no sean fiables.
- Pequeños errores se acumulan en múltiples movimientos.
Arquitectura de Integración GIS del Mundo Real
Así es como se ve una pila completa de integración GIS-PTZ:
| Capa | Componente | Rol |
|---|---|---|
| Detección | Radar / Sensor de Perímetro | Detecta intrusiones, emite coordenadas GPS |
| Procesamiento | Servidor GIS (por ejemplo, ArcGIS, QGIS) | Convierte GPS a ángulo de azimut de la cámara |
| Comando | Cliente ONVIF / API HTTP | Envía AbsoluteMove a la cámara PTZ |
| Retroalimentación | Consulta de Estado PTZ | Confirma que la cámara alcanzó la posición objetivo |
| Visualización | VMS / Panel Web | Muestra video en vivo con superposición de mapa |
El bucle de retroalimentación es crítico. Después de enviar el comando, su sistema debe consultar el estado PTZ para confirmar que realmente llegó al ángulo objetivo. Aquí es donde los codificadores absolutos demuestran su valor: la posición informada coincide con la realidad.
Consejos prácticos para la implementación en campo
En mi experiencia trabajando con integradores en proyectos exteriores, hay algunas cosas que pueden afectar la precisión de su GIS a PTZ:
- Oscilación del poste por el viento. Un poste de 10 metros con un viento de 30 mph puede oscilar entre $1^{\circ}$ y $2^{\circ}$. A una distancia de 500 metros, eso es un error de 9 a 17 metros en el suelo.
- Declinación magnética. Si calibra el Norte de su cámara con una brújula, recuerde que el Norte magnético no es el Norte verdadero. En Texas, la diferencia puede ser de $4^{\circ}$ a $8^{\circ}$.
- Alineación de montaje. Incluso un error de $0.5^{\circ}$ en cómo se monta la cámara en el soporte se transmitirá a cada comando GIS.
Siempre recomiendo hacer una calibración de campo después de la instalación. Elija tres puntos de referencia conocidos, anote sus coordenadas GPS, ordene a la cámara que apunte a cada uno y mida el desplazamiento. Luego aplique un factor de corrección en su software.
¿Qué tan precisa es la devolución de coordenadas basada en grados cuando consulto el estado de la PTZ?
He tenido clientes que me han dicho que sus cámaras PTZ anteriores informaban un ángulo pero en realidad apuntaban a otro lugar. Cuando está construyendo un sistema automatizado, los datos de posición incorrectos son peores que la ausencia de datos.
En las cámaras PTZ de grado industrial con codificadores absolutos, la precisión de la consulta de posición suele estar dentro de $\pm 0.1^{\circ}$. Puede consultar los valores actuales de Pan, Tilt y Zoom en cualquier momento a través de ONVIF ObtenerEstado o llamadas a la API HTTP. Los valores devueltos reflejan la posición física real de los motores, no solo la última posición comandada.
 Precisión de la consulta de estado PTZ retorno de coordenadas basado en grados
Precisión de la consulta de estado PTZ retorno de coordenadas basado en grados
Cómo funcionan las consultas de posición
Cuando envía un ObtenerEstado a través de ONVIF, la cámara lee los valores actuales del codificador y los convierte a coordenadas normalizadas. La respuesta se ve así:
<GetStatusResponse>
<PTZStatus>
<Position>
<PanTilt x="-0.333" y="0.125" />
<Zoom x="0.75" />
</Position>
<MoveStatus>
<PanTilt>IDLE</PanTilt>
<Zoom>IDLE</Zoom>
</MoveStatus>
</PTZStatus>
</GetStatusResponse>En EstadoMovimiento el campo le indica si la cámara todavía se está moviendo o ha alcanzado su objetivo. Esto es importante para la automatización: no debe capturar una instantánea hasta que el estado muestre INACTIVO.
Fuentes de error de posición
Incluso con codificadores absolutos, hay factores que afectan la precisión:
Holgura mecánica
La holgura es el pequeño espacio entre los engranajes. Cuando el motor invierte la dirección, los engranajes tienen que “cubrir” este espacio antes de que la cámara comience a moverse. El codificador puede informar la posición del motor correctamente, pero la lente de la cámara apunta ligeramente desviada debido al juego de los engranajes.
Las buenas cámaras PTZ incluyen compensación de holgura14 en su firmware. Esto significa que el motor se excede intencionalmente y luego se acerca al objetivo desde la misma dirección cada vez, eliminando el error de juego del engranaje.
Efectos de la temperatura
Los engranajes metálicos se expanden y contraen con la temperatura. En un verano de Texas, la carcasa de la cámara puede alcanzar $70^{\circ}C$ internamente. Esto puede desplazar el engranaje en una cantidad minúscula. En una rotación de $360^{\circ}$, el error acumulado podría alcanzar $0.2^{\circ}$ a $0.3^{\circ}$.
Comparación de precisión por grado de cámara
| Grado de cámara | Tipo de codificador | Precisión típica | Tasa de actualización de consulta de posición |
|---|---|---|---|
| Consumidor / Prosumidor | Incremental | $\pm 1.0^{\circ}$ a $\pm 2.0^{\circ}$ | 1 Hz |
| Gama Comercial Media | Incremental + Sensor de Inicio | $\pm 0.5^{\circ}$ | 2-5 Hz |
| Grado Industrial / Militar | Absoluto (Multivuelta) | $\pm 0.05^{\circ}$ a $\pm 0.1^{\circ}$ | 10+ Hz |
Por qué la velocidad de consulta es importante
Si está realizando un seguimiento automático impulsado por radar, la cámara debe informar su posición lo suficientemente rápido para que el algoritmo de seguimiento calcule las correcciones. Una tasa de actualización de 1 Hz significa que el sistema solo sabe dónde está la cámara una vez por segundo. A una velocidad de giro de $400^{\circ}/s$, la cámara puede recorrer $400^{\circ}$ entre actualizaciones. Eso es inútil para el seguimiento.
Las cámaras PTZ industriales de nuestra fábrica admiten velocidades de consulta de posición de 10 Hz o más. Esto proporciona al algoritmo de seguimiento suficientes datos para realizar correcciones fluidas y precisas en tiempo real.
Autocalibración y Corrección de Deriva
Incluso el mejor hardware se desvía después de meses de funcionamiento continuo. Recomiendo configurar una rutina de autocalibración programada:
- Cada 24 horas, ordene a la cámara que se mueva a un preset conocido (por ejemplo, un punto de referencia con coordenadas conocidas).
- Utilice análisis de video para detectar el punto de referencia en el cuadro.
- Mida el desplazamiento de píxeles desde el centro del cuadro.
- Calcule la corrección angular y aplíquela como un desplazamiento en su software de control.
Este enfoque de circuito cerrado mantiene su sistema preciso durante años de operación sin ninguna intervención manual.
¿El Posicionamiento Absoluto es compatible con todas las principales marcas de VMS como Genetec y Exacq?
Sé que esta pregunta quita el sueño a los integradores. Eliges una cámara, la instalas en el sitio y luego descubres que tu VMS no puede enviarle comandos absolutos. Ahora tienes una cámara de 3000 € que solo tiene control relativo por joystick. He visto que esto sucede demasiadas veces.
La mayoría de las principales plataformas VMS —incluyendo Genetec Security Center, Exacq exacqVision, Milestone XProtect, e incluso opciones de código abierto como Blue Iris— admiten comandos ONVIF AbsoluteMove. Sin embargo, el nivel de soporte varía. Algunas plataformas exponen el control total de coordenadas en su interfaz de usuario, mientras que otras solo lo admiten a través de su API o SDK. Siempre pruebe la versión específica del VMS con su modelo de cámara antes de comprometerse con un gran despliegue.
 Compatibilidad VMS posicionamiento absoluto Genetec Exacq Milestone
Compatibilidad VMS posicionamiento absoluto Genetec Exacq Milestone
La realidad de la compatibilidad
En teoría, todo VMS que afirma cumplir con ONVIF Profile S debería admitir MovimientoAbsoluto. En la práctica, hay lagunas. Algunas plataformas VMS implementan solo el estilo joystick MovimientoContinuo y MovimientoRelativo comandos porque son más fáciles de integrar en una interfaz de usuario. El MovimientoAbsoluto comando requiere que el VMS mantenga un sistema de coordenadas, muestre valores de ángulo y maneje la conversión de normalizado a grados, lo que implica más trabajo de desarrollo.
Desglose por plataforma
Esto es lo que he visto en pruebas del mundo real:
Genetec Security Center7 admite el posicionamiento absoluto a través de su módulo Map. Puede colocar cámaras en un mapa, definir su campo de visión y hacer clic para rastrear. El sistema envía comandos ONVIF MovimientoAbsoluto comandos "under the hood". Esto funciona bien, pero necesita el nivel de licencia adecuado; la licencia básica no incluye el control PTZ basado en mapas.
Milestone XProtect9 tiene un sólido soporte ONVIF y expone el posicionamiento absoluto a través de su Smart Client y MIP SDK. Si está creando una integración personalizada —por ejemplo, vinculando un sistema de radar a Milestone— puede usar el SDK para enviar comandos absolutos mediante programación. La interfaz de usuario estándar también muestra las coordenadas Pan/Tilt/Zoom al pasar el ratón sobre el panel de control PTZ.
Exacq exacqVision8 admite el posicionamiento absoluto ONVIF, pero la interfaz de usuario es más limitada. Puede configurar preajustes usando coordenadas absolutas, pero la entrada de coordenadas en tiempo real no es tan fluida como en Genetec o Milestone. Para la mayoría de los proyectos, esto está bien: configura sus preajustes durante la puesta en marcha y luego los activa a través de alarmas.
Lirio azul10 es popular entre los integradores más pequeños y los usuarios finales con conocimientos técnicos. Admite ONVIF y puede enviar comandos absolutos a través de su API HTTP. La interfaz de usuario de escritorio es básica, pero la API es potente. Muchos de mis clientes utilizan Blue Iris con n8n o Node-RED para crear flujos de trabajo de automatización personalizados.
Qué probar antes de comprar
Antes de comprometerse con una combinación de cámara-VMS para un proyecto grande, recomiendo realizar estas tres pruebas:
Prueba 1: AbsoluteMove Round-Trip
Envíe un MovimientoAbsoluto comando desde el VMS a una coordenada específica. Luego, consulte la posición de la cámara a través de ONVIF ObtenerEstado. Compare la posición comandada con la posición informada. Deberían coincidir dentro de $\pm 0.1^{\circ}$.
Prueba 2: Precisión de preajuste después del ciclo de alimentación
Establezca cinco preajustes utilizando coordenadas absolutas. Reinicie la cámara. Llame a cada preajuste y verifique si la cámara regresa a la misma posición exacta. Si se desvía más de $0.3^{\circ}$, es probable que la cámara utilice codificadores incrementales y no sea adecuada para flujos de trabajo de posicionamiento absoluto.
Prueba 3: Velocidad de ejecución de AbsoluteMove
Ordene a la cámara que se mueva de Pan $0^{\circ}$ a Pan $180^{\circ}$. Mida el tiempo. Una buena PTZ industrial debería completar esto en menos de 2 segundos a la velocidad máxima de giro ($400^{\circ}/s$ o superior). Si tarda más, el motor o el canal de comunicación tienen un cuello de botella.
La ventaja OEM/ODM
Una cosa que siempre les digo a los integradores: si su VMS tiene requisitos específicos sobre cómo se formatean los comandos PTZ, podemos personalizar el firmware de la cámara para que coincida. Como fabricante líder en I+D, controlamos toda la pila de firmware. Podemos ajustar el formato de respuesta ONVIF, agregar puntos finales CGI personalizados o incluso implementar protocolos propietarios si su proyecto lo exige. Esta es la ventaja de trabajar directamente con una fábrica en lugar de pasar por una empresa comercial que no puede cambiar una sola línea de código.
Conclusión
El posicionamiento absoluto convierte su cámara PTZ de una herramienta manual a un sensor programable. Con los codificadores, protocolos e integración de VMS adecuados, obtiene un control preciso, repetible y automatizado que el movimiento relativo simplemente no puede ofrecer.
1. Aprenda cómo el posicionamiento absoluto permite movimientos de cámara precisos y repetibles a coordenadas exactas. ︎↩︎ 2. Los codificadores absolutos proporcionan retroalimentación de posición inmediata y sin deriva sin necesidad de volver a inicializar. ︎↩︎ 3. Los codificadores incrementales pierden la posición al perder energía y requieren inicialización, lo que limita la fiabilidad de la automatización. ︎↩︎ 4. Aprenda cómo se utilizan los sistemas de información geográfica con cámaras PTZ para el seguimiento basado en coordenadas. ︎↩︎ 5. Pelco-D es un protocolo RS-485 ampliamente utilizado que admite comandos de posicionamiento PTZ absoluto. ︎↩︎ 6. Las API HTTP permiten enviar comandos PTZ absolutos a través de simples solicitudes URL en redes IP. ︎↩︎ 7. El VMS de Genetec admite el control PTZ absoluto a través de su módulo de mapas y la integración ONVIF. ︎↩︎ 8. ExacqVision admite el posicionamiento absoluto ONVIF para el control PTZ basado en preajustes. ︎↩︎ 9. Milestone XProtect expone el posicionamiento PTZ absoluto a través de su Smart Client y MIP SDK. ︎↩︎ 10. Blue Iris soporta comandos absolutos ONVIF a través de su API HTTP para flujos de trabajo de automatización personalizados. ︎↩︎ 11. ONVIF Profile S define la transmisión de video básica y el control PTZ, incluido AbsoluteMove. ︎↩︎ 12. ONVIF Profile T extiende Profile S con funciones avanzadas como soporte de audio y metadatos. ︎↩︎ 13. El azimut es el rumbo de la brújula utilizado para calcular el ángulo de paneo desde una cámara a un objetivo GIS. ︎↩︎ 14. La compensación de holgura elimina el juego de engranajes para un posicionamiento PTZ preciso, especialmente al invertir la dirección. ︎↩︎