
2. لقد شاهدت المدمجين يضيعون ساعات في تحريك كاميرا PTZ لليسار واليمين والأعلى والأسفل - محاولين الوصول إلى الزاوية الدقيقة التي يحتاجونها. هناك طريقة أفضل.
3. نعم، يمكنك تحقيق 4. تحكم تحديد الموضع المطلق1 5. على كاميرات PTZ الصناعية. بدلاً من إرسال أوامر “تحرك لليسار” أو “تحرك لليمين”، فإنك ترسل إحداثيات درجات دقيقة - مثل Pan 180°، Tilt 45° - وتنتقل الكاميرا إلى هذا الموضع الدقيق فورًا. يتطلب هذا أجهزة مزودة بمشفرات مطلقة ودعم بروتوكول عبر ONVIF،, Pelco-D5, أو 6. HTTP API6.
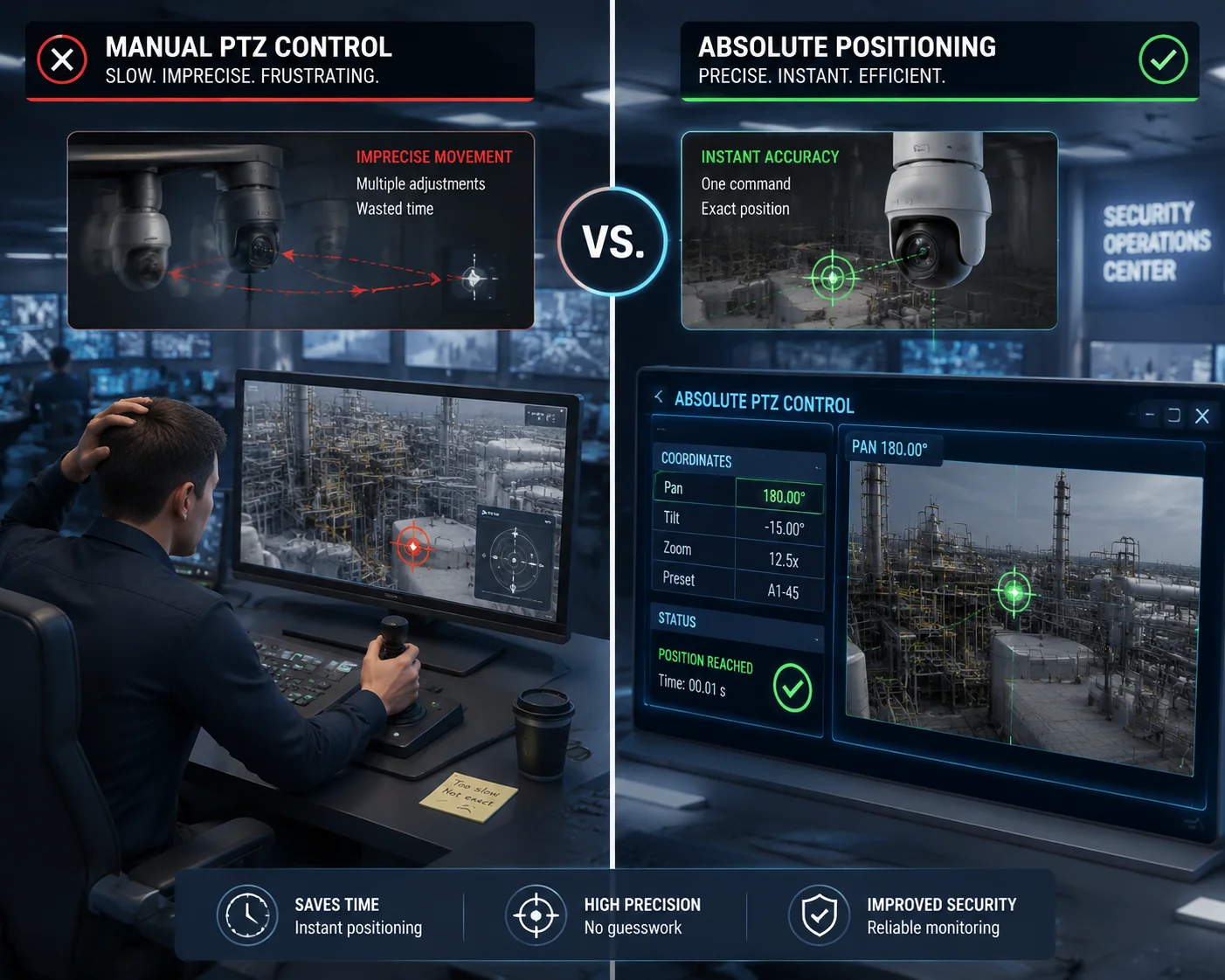 7. تحكم تحديد الموضع المطلق لكاميرا PTZ مقابل الحركة النسبية
7. تحكم تحديد الموضع المطلق لكاميرا PTZ مقابل الحركة النسبية
8. يغير تحديد الموضع المطلق كل شيء عن كيفية تصميم نظام المراقبة الخاص بك. إنه الأساس لتتبع الرادار، والتكامل مع خرائط نظم المعلومات الجغرافية، والاستجابة الآلية المدفوعة بالذكاء الاصطناعي. أدناه، سأفصل الأسئلة الرئيسية التي يطرحها عليّ المدمجون أكثر حول هذه الميزة - وأقدم لك الإجابات التقنية الحقيقية.
جدول المحتويات
9. هل يمكنني إصدار أمر لكاميرا PTZ بالانتقال إلى Pan 180° بالضبط، Tilt 45° عبر سلسلة ONVIF؟
13. أتلقى هذا السؤال تقريبًا كل أسبوع من مدمجي الأنظمة. يريدون معرفة ما إذا كان بإمكانهم إرسال أمر واحد وجعل الكاميرا تصل إلى إحداثيات دقيقة. الإجابة مهمة لأن سير عمل الأتمتة بأكمله يعتمد عليها.
14. نعم، يمكنك. ملف تعريف ONVIF S11 و ONVIF Profile T12 15. كلاهما يدعم 17. أمر AbsoluteMove. ترسل طلب SOAP بقيم Pan و Tilt و Zoom المعيارية، وتنتقل الكاميرا مباشرة إلى هذا الموضع الدقيق. الشرط الأساسي هو أن جهاز PTZ الخاص بك يجب أن يحتوي على 18. مشفرات مطلقة 19. مدمجة في المحركات.2 20. تحكم كاميرا PTZ بأمر ONVIF AbsoluteMove.
 أمر ONVIF AbsoluteMove للتحكم في كاميرا PTZ
أمر ONVIF AbsoluteMove للتحكم في كاميرا PTZ
كيف تعمل أوامر ONVIF AbsoluteMove
يستخدم بروتوكول ONVIF قيمًا مُطَبَّعة بدلاً من أرقام الدرجات الخام. هذا يعني أن قيم Pan و Tilt تتراوح بين $-1.0$ و $+1.0$، وتتراوح قيمة Zoom بين $0.0$ و $1.0$. يقوم نظام إدارة الفيديو (VMS) أو منصة الأتمتة الخاصة بك بتحويل الدرجات الفعلية إلى هذه القيم المُطَبَّعة قبل إرسال الأمر.
إليك كيف يبدو طلب ONVIF 17. أمر AbsoluteMove. ترسل طلب SOAP بقيم Pan و Tilt و Zoom المعيارية، وتنتقل الكاميرا مباشرة إلى هذا الموضع الدقيق. الشرط الأساسي هو أن جهاز PTZ الخاص بك يجب أن يحتوي على SOAP نموذجي في الممارسة العملية:
<AbsoluteMove xmlns="http://www.onvif.org/ver20/ptz/wsdl">
<ProfileToken>MainStream</ProfileToken>
<Position>
<PanTilt x="0.0" y="0.25" />
<Zoom x="0.5" />
</Position>
</AbsoluteMove>في هذا المثال،, x="0.0" يقابل Pan $180^{\circ}$ (نقطة المنتصف لنطاق $360^{\circ}$)، و y="0.25" يقابل Tilt $45^{\circ}$ (ربع المسافة للأعلى من المركز). يعتمد التعيين الدقيق على نظام إحداثيات الكاميرا، ولكن المنطق هو نفسه عبر جميع الأجهزة المتوافقة مع ONVIF.
الأجهزة التي تقف وراء الأمر
إرسال الأمر هو الجزء السهل. الجزء الصعب هو التأكد من أن الكاميرا تصل فعليًا إلى المكان الذي أخبرتها به. هذا يعود إلى مكون واحد: المشفر المطلق.
هناك نوعان من المشفرات في محركات PTZ:
| الميزة | المشفر التزايدي | المشفر المطلق |
|---|---|---|
| الموضع عند التشغيل | غير معروف — يجب إعادة التوجيه | معروف فوراً |
| الانجراف بمرور الوقت | يتراكم الخطأ | لا انحراف |
| التكلفة | أقل | أعلى |
| حالة الاستخدام | كاميرا PTZ للمستهلك، إعدادات مسبقة أساسية | كاميرا PTZ صناعية، تكامل الرادار |
| الدقة | $\pm 1.0^{\circ}$ نموذجي | $\pm 0.1^{\circ}$ أو أفضل |
كاميرا مزودة بـ مشفرات تزايدية3 لا يزال بإمكانها قبول 17. أمر AbsoluteMove. ترسل طلب SOAP بقيم Pan و Tilt و Zoom المعيارية، وتنتقل الكاميرا مباشرة إلى هذا الموضع الدقيق. الشرط الأساسي هو أن جهاز PTZ الخاص بك يجب أن يحتوي على أمر. ولكن بعد إعادة التشغيل، تفقد نقطة مرجعها. يجب عليها تشغيل روتين “تحديد الموضع” - الدوران حتى يتوقف ماديًا - قبل أن تعرف مكانها مرة أخرى. خلال ذلك الوقت، يكون نظام الأتمتة الخاص بك أعمى.
يعرف المشفر المطلق موقعه الدقيق لحظة تشغيل الطاقة. لا حاجة لتحديد الموضع. لا تأخير. لهذا السبب أوصي دائمًا بالمشفرات المطلقة لأي مشروع يتضمن تتبعًا آليًا أو تكامل GIS.
صيغة التحويل: الدرجات إلى القيم المعيارية
إذا كانت منصة الأتمتة الخاصة بك تعمل بالدرجات ولكن ONVIF تحتاج إلى قيم معيارية، فإليك الحساب الأساسي:
$$x_{pan} = \frac{(\text{Target Pan} – 180)}{180}$$
$$y_{tilt} = \frac{\text{Target Tilt}}{90}$$
لذا بالنسبة لـ Pan $180^{\circ}$، Tilt $45^{\circ}$:
- $x_{pan} = \frac{(180 – 180)}{180} = 0.0$
- $y_{tilt} = \frac{45}{90} = 0.5$
تعمل هذه الصيغة مع معظم الكاميرات، ولكن تحقق دائمًا من تعيين الإحداثيات الخاص بالشركة المصنعة. تحدد بعض الكاميرات $0^{\circ}$ على أنها الشمال، وتحددها أخرى على أنها موضع التشغيل.
10. هل تسمح ميزة تحديد الموضع المطلق بتكامل أفضل مع خرائط نظم المعلومات الجغرافية؟
لقد رأيت مشاريع تفشل لأن المُدمج لم يتمكن من ربط برنامج الخرائط الخاص به بكاميرا PTZ. كان لديهم لوحة تحكم GIS جميلة، لكن الكاميرا ظلت هناك بلا فائدة عندما تم تشغيل إنذار. هذه مضيعة مؤلمة للميزانية.
تحديد المواقع المطلق هو المفتاح الذي يفتح الحقيقي تكامل نظم المعلومات الجغرافية4. عندما تُبلغ الكاميرا عن زوايا التحريك والإمالة الدقيقة الخاصة بها، يمكن لبرنامج نظم المعلومات الجغرافية الخاص بك حساب ما تنظر إليه الكاميرا بالضبط على الخريطة. وعندما تنقر على نقطة على الخريطة، يمكن للبرنامج تحويل إحداثيات GPS هذه إلى أمر تحريك/إمالة وإرسال الكاميرا إلى هناك على الفور.
 تكامل خريطة نظم المعلومات الجغرافية مع تحديد المواقع المطلق لكاميرات PTZ
تكامل خريطة نظم المعلومات الجغرافية مع تحديد المواقع المطلق لكاميرات PTZ
الرياضيات وراء التحويل من نظم المعلومات الجغرافية إلى PTZ
لربط خريطة نظم المعلومات الجغرافية بكاميرا PTZ، تحتاج إلى ثلاث قطع من المعلومات:
- موقع GPS للكاميرا — خط العرض وخط الطول لموضع تثبيت الكاميرا.
- اتجاه تثبيت الكاميرا — أي اتجاه بوصلة تواجه الكاميرا عند تحريك $0^{\circ}$.
- موقع GPS للهدف — النقطة الموجودة على الخريطة التي تريد أن تنظر إليها الكاميرا.
باستخدام هذه المدخلات الثلاثة، يمكنك حساب السمت13 (اتجاه البوصلة) من الكاميرا إلى الهدف:
$$\text{السمت} = \arctan2\left(\sin(\Delta\lambda) \cdot \cos(\phi_2),\ \cos(\phi_1) \cdot \sin(\phi_2) – \sin(\phi_1) \cdot \cos(\phi_2) \cdot \cos(\Delta\lambda)\right)$$
حيث $\phi_1$ هو خط عرض الكاميرا، و $\phi_2$ هو خط عرض الهدف، و $\Delta\lambda$ هو الفرق في خط الطول. النتيجة تعطيك زاوية التحريك. يتم حساب الإمالة بناءً على المسافة واختلاف الارتفاع.
لماذا الحركة النسبية تكسر تكامل نظم المعلومات الجغرافية
مع الحركة النسبية، يمكنك فقط القول “استدر إلى اليسار 5 درجات”. لكن برنامج نظم المعلومات الجغرافية لا يفكر بالمصطلحات النسبية. إنه يفكر بالإحداثيات المطلقة. إذا حسب نظام نظم المعلومات الجغرافية أن الهدف عند السمت $237^{\circ}$، فإنه يحتاج إلى إرسال لفة = 237 درجة مباشرة. لا توجد طريقة موثوقة للقيام بذلك باستخدام الأوامر النسبية لأن:
- أنت لا تعرف الموضع الحالي للكاميرا بدقة.
- زمن استجابة الشبكة يجعل أوامر “الإيقاف” غير موثوقة.
- الأخطاء الصغيرة تتراكم على مدار حركات متعددة.
بنية تكامل نظم المعلومات الجغرافية في العالم الحقيقي
إليك كيف يبدو مكدس تكامل كامل لنظم المعلومات الجغرافية وكاميرات PTZ:
| الطبقة | المكوّن | الدور |
|---|---|---|
| الكشف | رادار / مستشعر محيط | يكتشف التسلل، ويخرج إحداثيات GPS |
| المعالجة | خادم نظم المعلومات الجغرافية (مثل ArcGIS، QGIS) | يحول إحداثيات GPS إلى زاوية سمت الكاميرا |
| الأمر | عميل ONVIF / واجهة برمجة تطبيقات HTTP | يرسل AbsoluteMove إلى كاميرا PTZ |
| التغذية الراجعة | استعلام حالة PTZ | يؤكد وصول الكاميرا إلى الموضع المستهدف |
| العرض | نظام إدارة الفيديو / لوحة تحكم الويب | يعرض الفيديو المباشر مع تراكب الخريطة |
حلقة التغذية الراجعة أمر بالغ الأهمية. بعد إرسال الأمر، يجب على نظامك الاستعلام عن حالة PTZ للتأكد من وصولها فعليًا إلى الزاوية المستهدفة. هذا هو المكان الذي تثبت فيه أجهزة التشفير المطلقة قيمتها - يتطابق الموضع المُبلغ عنه مع الواقع.
نصائح عملية للنشر الميداني
في تجربتي في العمل مع المدمجين في المشاريع الخارجية، هناك بعض الأشياء التي يمكن أن تؤثر على دقة نظام المعلومات الجغرافية إلى PTZ:
- تمايل العمود بسبب الرياح. يمكن لعمود بطول 10 أمتار في رياح بسرعة 30 ميلاً في الساعة أن يتأرجح من $1^{\circ}$ إلى $2^{\circ}$. على مسافة 500 متر، يمثل هذا خطأ يتراوح بين 9 إلى 17 مترًا على الأرض.
- الانحراف المغناطيسي. إذا قمت بمعايرة شمال الكاميرا باستخدام بوصلة، فتذكر أن الشمال المغناطيسي ليس الشمال الحقيقي. في تكساس، يمكن أن يكون الفرق من $4^{\circ}$ إلى $8^{\circ}$.
- محاذاة التركيب. حتى خطأ بمقدار $0.5^{\circ}$ في كيفية تثبيت الكاميرا على الحامل سيؤثر على كل أمر GIS.
أوصي دائمًا بإجراء معايرة ميدانية بعد التركيب. اختر ثلاثة معالم معروفة، وسجل إحداثيات GPS الخاصة بها، وقم بتوجيه الكاميرا إلى كل منها، وقم بقياس الإزاحة. ثم قم بتطبيق عامل تصحيح في برنامجك.
11. ما مدى دقة إرجاع الإحداثيات المستندة إلى الدرجات عندما أستعلم عن حالة كاميرا PTZ؟
لقد أخبرني العملاء أن كاميرات PTZ السابقة لديهم أبلغت عن زاوية معينة ولكنها كانت تشير فعليًا إلى مكان آخر. عندما تقوم ببناء نظام مؤتمت، فإن بيانات الموضع السيئة أسوأ من عدم وجود بيانات على الإطلاق.
في كاميرات PTZ الصناعية المزودة بأجهزة تشفير مطلقة، تكون دقة الاستعلام عن الموضع عادةً في حدود $\pm 0.1^{\circ}$. يمكنك الاستعلام عن قيم الدوران الأفقي والرأسي والتقريب الحالية في أي وقت عبر ONVIF الحصول على الحالة أو استدعاءات واجهة برمجة تطبيقات HTTP. تعكس القيم المُرجعة الموضع الفعلي للمحركات، وليس فقط آخر موضع تم توجيهه.
 دقة الاستعلام عن حالة PTZ إرجاع إحداثيات قائمة على الدرجات
دقة الاستعلام عن حالة PTZ إرجاع إحداثيات قائمة على الدرجات
كيف تعمل استعلامات الموضع
عندما ترسل الحصول على الحالة عبر ONVIF، تقرأ الكاميرا قيم المُشفّر الحالية وتحولها إلى إحداثيات مُطَبَّعة. يبدو الرد كالتالي:
<GetStatusResponse>
<PTZStatus>
<Position>
<PanTilt x="-0.333" y="0.125" />
<Zoom x="0.75" />
</Position>
<MoveStatus>
<PanTilt>IDLE</PanTilt>
<Zoom>IDLE</Zoom>
</MoveStatus>
</PTZStatus>
</GetStatusResponse>إن حالة الحركة يخبرك الحقل ما إذا كانت الكاميرا لا تزال تتحرك أو وصلت إلى هدفها. هذا مهم للأتمتة - لا يجب عليك التقاط لقطة حتى يُظهر الوضع خامل.
مصادر خطأ الموضع
حتى مع المُشفّرات المطلقة، هناك عوامل تؤثر على الدقة:
الارتداد الميكانيكي
الارتداد هو الفجوة الصغيرة بين التروس. عندما يعكس المحرك اتجاهه، يجب على التروس “سد” هذه الفجوة قبل أن تبدأ الكاميرا في التحرك فعليًا. قد يُبلغ المُشفّر عن موضع المحرك بشكل صحيح، لكن عدسة الكاميرا تشير إلى مكان خاطئ قليلاً بسبب تآكل التروس.
تشمل كاميرات PTZ الجيدة تعويض الارتداد14 في برنامجها الثابت. هذا يعني أن المحرك يتجاوز الهدف عمدًا ثم يقترب منه من نفس الاتجاه في كل مرة، مما يلغي خطأ فجوة التروس.
تأثيرات درجة الحرارة
تتمدد وتنكمش التروس المعدنية مع درجة الحرارة. في صيف تكساس، يمكن أن يصل غلاف الكاميرا داخليًا إلى 70 درجة مئوية. يمكن أن يؤدي هذا إلى تحويل تشابك التروس بمقدار ضئيل. على مدار دوران 360 درجة، قد يصل الخطأ التراكمي إلى 0.2 درجة إلى 0.3 درجة.
مقارنة الدقة حسب درجة الكاميرا
| درجة الكاميرا | نوع جهاز التشفير | الدقة النموذجية | معدل تحديث استعلام الموضع |
|---|---|---|---|
| استهلاكي / شبه احترافي | تزايدي | $\pm 1.0^{\circ}$ إلى $\pm 2.0^{\circ}$ | 1 هرتز |
| تجاري متوسط المدى | مستشعر زيادة + مستشعر موضع | $\pm 0.5^{\circ}$ | 2-5 هرتز |
| درجة صناعية / عسكرية | مطلق (متعدد الدورات) | $\pm 0.05^{\circ}$ إلى $\pm 0.1^{\circ}$ | 10+ هرتز |
لماذا سرعة الاستعلام مهمة
إذا كنت تقوم بتتبع تلقائي مدفوع بالرادار، فيجب على الكاميرا الإبلاغ عن موضعها بسرعة كافية لخوارزمية التتبع لحساب التصحيحات. معدل تحديث 1 هرتز يعني أن النظام يعرف فقط مكان الكاميرا مرة واحدة في الثانية. بسرعة دوران تبلغ $400^{\circ}/s$، يمكن للكاميرا أن تسافر $400^{\circ}$ بين التحديثات. هذا عديم الفائدة للتتبع.
تدعم كاميرات PTZ الصناعية من مصنعنا معدلات استعلام الموضع البالغة 10 هرتز أو أعلى. هذا يمنح خوارزمية التتبع بيانات كافية لإجراء تصحيحات سلسة ودقيقة في الوقت الفعلي.
المعايرة الذاتية وتصحيح الانحراف
حتى أفضل الأجهزة تنحرف على مدى أشهر من التشغيل المستمر. أوصي بإعداد روتين معايرة ذاتية مجدول:
- كل 24 ساعة، قم بتوجيه الكاميرا إلى إعداد مسبق معروف (على سبيل المثال، معلم ذو إحداثيات معروفة).
- استخدم تحليلات الفيديو للكشف عن المعلم في الإطار.
- قم بقياس إزاحة البكسل من مركز الإطار.
- احسب التصحيح الزاوي وقم بتطبيقه كإزاحة في برنامج التحكم الخاص بك.
يحافظ هذا النهج المغلق على دقة نظامك على مدار سنوات التشغيل دون أي تدخل يدوي.
12. هل تدعم جميع العلامات التجارية الكبرى لأنظمة إدارة الفيديو (VMS) مثل Genetec و Exacq ميزة تحديد الموضع المطلق؟
أعرف أن هذا السؤال يبقي المدمجين مستيقظين ليلاً. تختار كاميرا، وتثبتها في الموقع، ثم تكتشف أن نظام إدارة الفيديو الخاص بك لا يمكنه إرسال أوامر مطلقة إليها. الآن لديك كاميرا بقيمة 3000 دولار لا تقوم إلا بالتحكم النسبي بعصا التحكم. لقد رأيت هذا يحدث مرات عديدة.
تدعم معظم منصات أنظمة إدارة الفيديو الرئيسية - بما في ذلك Genetec Security Center و Exacq exacqVision و Milestone XProtect، وحتى الخيارات مفتوحة المصدر مثل Blue Iris - أوامر ONVIF AbsoluteMove. ومع ذلك، يختلف مستوى الدعم. تعرض بعض المنصات تحكمًا كاملاً بالإحداثيات في واجهة المستخدم الخاصة بها، بينما يدعم البعض الآخر ذلك فقط من خلال واجهة برمجة التطبيقات (API) أو حزمة تطوير البرامج (SDK). اختبر دائمًا إصدار نظام إدارة الفيديو المحدد مع طراز الكاميرا الخاص بك قبل الالتزام بنشر كبير.
 توافق نظام إدارة الفيديو تحديد المواقع المطلق Genetec Exacq Milestone
توافق نظام إدارة الفيديو تحديد المواقع المطلق Genetec Exacq Milestone
واقع التوافق
على الورق، يجب أن يدعم كل نظام إدارة فيديو يدعي الامتثال لـ ONVIF Profile S 17. أمر AbsoluteMove. ترسل طلب SOAP بقيم Pan و Tilt و Zoom المعيارية، وتنتقل الكاميرا مباشرة إلى هذا الموضع الدقيق. الشرط الأساسي هو أن جهاز PTZ الخاص بك يجب أن يحتوي على. في الممارسة العملية، توجد فجوات. تنفذ بعض منصات أنظمة إدارة الفيديو فقط نمط عصا التحكم حركة مستمرة و حركة نسبية الأوامر لأنها أبسط في دمجها في واجهة المستخدم. الأمر 17. أمر AbsoluteMove. ترسل طلب SOAP بقيم Pan و Tilt و Zoom المعيارية، وتنتقل الكاميرا مباشرة إلى هذا الموضع الدقيق. الشرط الأساسي هو أن جهاز PTZ الخاص بك يجب أن يحتوي على يتطلب من نظام إدارة الفيديو الاحتفاظ بنظام إحداثيات وعرض قيم الزوايا والتعامل مع التحويل من القيم المعيارية إلى الدرجات - وهو ما يتطلب المزيد من العمل التطويري.
تفصيل حسب المنصة
إليك ما رأيته في الاختبارات الواقعية:
جينيتك سيكيوريتي سنتر7 يدعم تحديد المواقع المطلق من خلال وحدة الخرائط الخاصة به. يمكنك وضع الكاميرات على خريطة، وتحديد مجال رؤيتها، والنقر للتتبع. يرسل النظام أوامر ONVIF 17. أمر AbsoluteMove. ترسل طلب SOAP بقيم Pan و Tilt و Zoom المعيارية، وتنتقل الكاميرا مباشرة إلى هذا الموضع الدقيق. الشرط الأساسي هو أن جهاز PTZ الخاص بك يجب أن يحتوي على تحت الغطاء. يعمل هذا بشكل جيد، ولكنك تحتاج إلى مستوى الترخيص المناسب - الترخيص الأساسي لا يشمل التحكم في PTZ المستند إلى الخريطة.
مايلستون XProtect9 يتمتع بدعم قوي لـ ONVIF ويعرض تحديد المواقع المطلق من خلال Smart Client و MIP SDK. إذا كنت تقوم بإنشاء تكامل مخصص - على سبيل المثال، ربط نظام رادار بـ Milestone - يمكنك استخدام SDK لإرسال أوامر مطلقة برمجيًا. تعرض واجهة المستخدم القياسية أيضًا إحداثيات Pan/Tilt/Zoom عند تمرير مؤشر الماوس فوق لوحة تحكم PTZ.
Exacq exacqVision8 يدعم تحديد المواقع المطلق لـ ONVIF، ولكن واجهة المستخدم محدودة أكثر. يمكنك تعيين نقاط مسبقة باستخدام إحداثيات مطلقة، ولكن إدخال الإحداثيات في الوقت الفعلي ليس سلسًا مثل Genetec أو Milestone. بالنسبة لمعظم المشاريع، هذا جيد - تقوم بتعيين نقاطك المسبقة أثناء التشغيل ثم تشغيلها عبر الإنذارات.
السوسن الأزرق10 يحظى بشعبية بين المدمجين الأصغر والمستخدمين النهائيين ذوي الخبرة التقنية. يدعم ONVIF ويمكنه إرسال أوامر مطلقة من خلال واجهة برمجة تطبيقات HTTP الخاصة به. واجهة المستخدم لسطح المكتب أساسية، ولكن واجهة برمجة التطبيقات قوية. يستخدم العديد من عملائي Blue Iris مع n8n أو Node-RED لبناء تدفقات عمل أتمتة مخصصة.
ما يجب اختباره قبل الشراء
قبل الالتزام بكاميرا-نظام إدارة الفيديو (VMS) لمشروع كبير، أوصي بإجراء هذه الاختبارات الثلاثة:
الاختبار 1: انتقال مطلق ذهابًا وإيابًا
أرسل 17. أمر AbsoluteMove. ترسل طلب SOAP بقيم Pan و Tilt و Zoom المعيارية، وتنتقل الكاميرا مباشرة إلى هذا الموضع الدقيق. الشرط الأساسي هو أن جهاز PTZ الخاص بك يجب أن يحتوي على أمرًا من نظام إدارة الفيديو (VMS) إلى إحداثي محدد. ثم استعلم عن موضع الكاميرا عبر ONVIF الحصول على الحالة. قارن الموضع المطلوب بالموضع المُبلغ عنه. يجب أن يتطابقا في حدود $\pm 0.1^{\circ}$.
الاختبار 2: دقة الإعداد المسبق بعد إعادة التشغيل
قم بتعيين خمسة إعدادات مسبقة باستخدام إحداثيات مطلقة. قم بإعادة تشغيل الكاميرا. قم باستدعاء كل إعداد مسبق وتحقق مما إذا كانت الكاميرا تعود إلى نفس الموضع بالضبط. إذا انحرفت بأكثر من $0.3^{\circ}$، فمن المحتمل أن الكاميرا تستخدم أجهزة تشفير تزايدية وليست مناسبة لسير عمل تحديد المواقع المطلق.
الاختبار 3: سرعة تنفيذ الانتقال المطلق
قم بقيادة الكاميرا للانتقال من $0^{\circ}$ إلى $180^{\circ}$. قم بقياس الوقت. يجب أن تكمل كاميرا PTZ الصناعية الجيدة ذلك في أقل من ثانيتين بسرعة دوران قصوى ($400^{\circ}/s$ أو أعلى). إذا استغرق الأمر وقتًا أطول، فإن المحرك أو خط أنابيب الاتصال يعاني من اختناق.
ميزة الشركة المصنعة للمعدات الأصلية/المصنعة للتصميم الأصلي
شيء واحد أقوله دائمًا للمُدمجين: إذا كان نظام إدارة الفيديو (VMS) الخاص بك لديه متطلبات محددة لكيفية تنسيق أوامر PTZ، فيمكننا تخصيص البرنامج الثابت للكاميرا ليتناسب معها. بصفتنا مُصنِّعًا يقوده البحث والتطوير، فإننا نتحكم في مكدس البرنامج الثابت بالكامل. يمكننا تعديل تنسيق استجابة ONVIF، أو إضافة نقاط نهاية CGI مخصصة، أو حتى تنفيذ بروتوكولات خاصة إذا كان مشروعك يتطلب ذلك. هذه هي ميزة العمل مباشرة مع مصنع بدلاً من المرور عبر شركة تجارية لا يمكنها تغيير سطر واحد من التعليمات البرمجية.
الخاتمة
يحول تحديد المواقع المطلق كاميرا PTZ الخاصة بك من أداة يدوية إلى مستشعر قابل للبرمجة. مع أجهزة التشفير والبروتوكولات والتكامل المناسب لنظام إدارة الفيديو (VMS)، تحصل على تحكم دقيق وقابل للتكرار وآلي لا يمكن للحركة النسبية توفيره ببساطة.
1. تعلم كيف يسمح تحديد المواقع المطلق بحركات كاميرا دقيقة وقابلة للتكرار إلى إحداثيات محددة. ︎↩︎ 2. توفر أجهزة التشفير المطلقة تغذية راجعة فورية للموضع خالية من الانحراف دون الحاجة إلى إعادة التعيين. ︎↩︎ 3. تفقد أجهزة التشفير التزايدية الموضع عند فقدان الطاقة وتتطلب إعادة التعيين، مما يحد من موثوقية الأتمتة. ︎↩︎ 4. تعلم كيف تُستخدم أنظمة المعلومات الجغرافية مع كاميرات PTZ للتتبع المستند إلى الإحداثيات. ︎↩︎ 5. Pelco-D هو بروتوكول RS-485 مستخدم على نطاق واسع يدعم أوامر تحديد المواقع المطلقة لـ PTZ. ︎↩︎ 6. تسمح واجهات برمجة تطبيقات HTTP بإرسال أوامر PTZ المطلقة عبر طلبات URL بسيطة عبر شبكات IP. ︎↩︎ 7. يدعم نظام إدارة الفيديو (VMS) من Genetec التحكم المطلق في PTZ من خلال وحدة الخرائط الخاصة به وتكامل ONVIF. ︎↩︎ 8. يدعم ExacqVision تحديد المواقع المطلق عبر ONVIF للتحكم في PTZ المستند إلى الإعدادات المسبقة. ︎↩︎ يكشف Milestone XProtect عن تحديد المواقع المطلق للكاميرات المتحركة (PTZ) من خلال عميله الذكي و MIP SDK. ︎↩︎ يدعم Blue Iris أوامر ONVIF المطلقة عبر واجهة برمجة تطبيقات HTTP الخاصة به لسير عمل الأتمتة المخصصة. ︎↩︎ يحدد ONVIF Profile S بث الفيديو الأساسي والتحكم في الكاميرات المتحركة (PTZ)، بما في ذلك AbsoluteMove. ︎↩︎ يوسع ONVIF Profile T نطاق Profile S بميزات متقدمة مثل دعم الصوت والبيانات الوصفية. ︎↩︎ السمت هو الاتجاه البوصلة المستخدم لحساب زاوية الانحراف من الكاميرا إلى هدف نظم المعلومات الجغرافية. ︎↩︎ يعوض الارتداد عن لعب التروس لتحديد المواقع الدقيق للكاميرات المتحركة (PTZ)، خاصة عند عكس الاتجاه. ︎↩︎