
Ich habe gesehen, wie Integratoren Stunden damit verschwendet haben, eine PTZ-Kamera nach links, rechts, oben, unten zu bewegen – um den exakten Winkel zu treffen, den sie benötigen. Es gibt einen besseren Weg.
Ja, Sie können absolute Positionierungskontrolle1 bei PTZ-Kameras in Industriequalität erreichen. Anstatt Befehle wie “nach links bewegen” oder “nach rechts bewegen” zu senden, senden Sie exakte Gradkoordinaten – wie Schwenken 180°, Neigen 45° – und die Kamera rastet sofort an dieser präzisen Position ein. Dies erfordert Hardware mit absoluten Encodern und Protokollunterstützung über ONVIF, Pelco-D5, oder HTTP-API6.
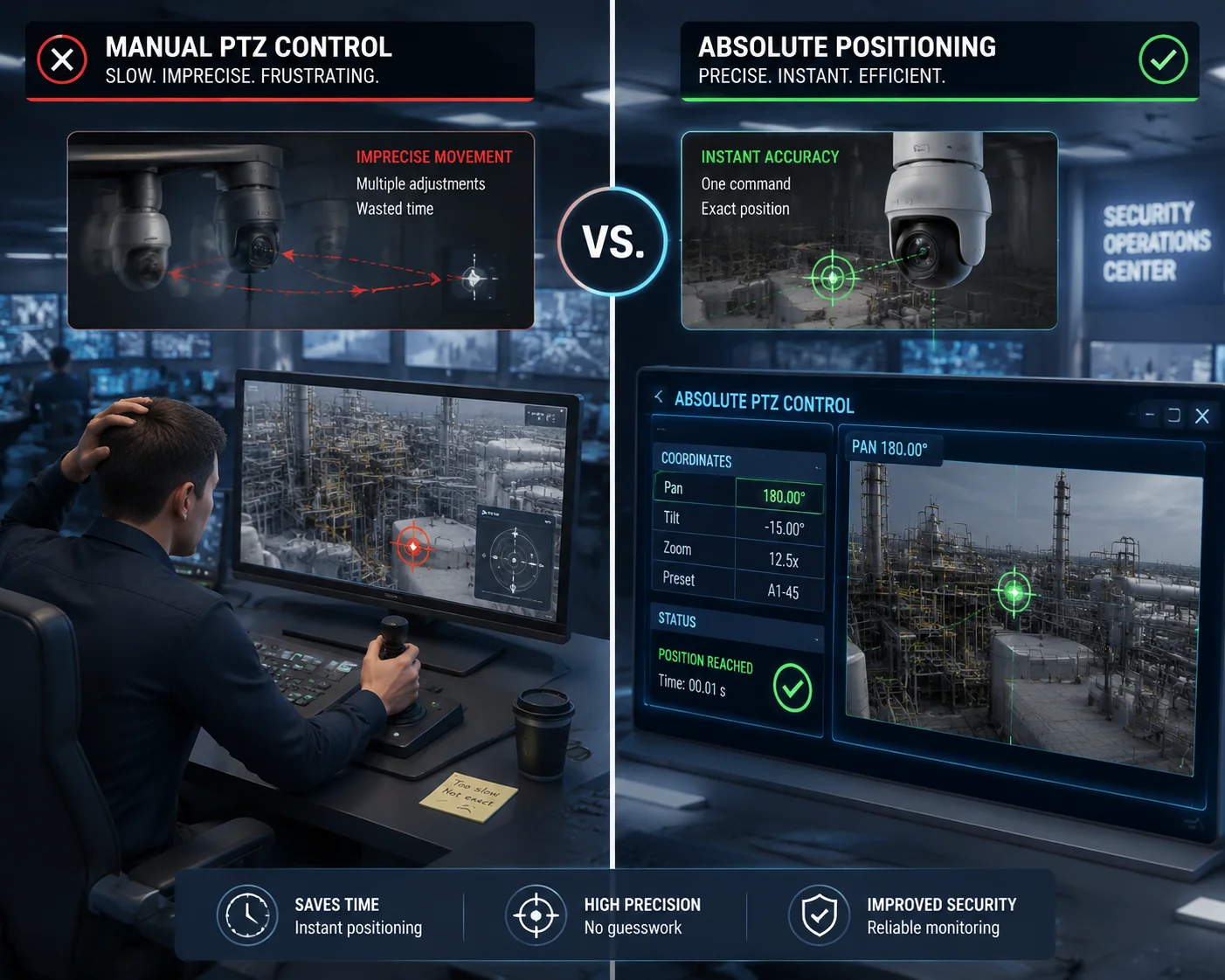 PTZ-Kamera absolute Positionierungskontrolle vs. relative Bewegung
PTZ-Kamera absolute Positionierungskontrolle vs. relative Bewegung
Absolute Positionierung verändert alles daran, wie Sie ein Überwachungssystem entwerfen. Sie ist die Grundlage für Radarverfolgung, GIS-Kartenintegration und KI-gesteuerte automatisierte Reaktionen. Im Folgenden gehe ich auf die wichtigsten Fragen ein, die Integratoren mir am häufigsten zu dieser Funktion stellen – und gebe Ihnen die echten technischen Antworten.
Inhaltsübersicht
Kann ich die PTZ über einen ONVIF-String exakt auf Schwenken 180°, Neigen 45° steuern?
Diese Frage bekomme ich fast jede Woche von Systemintegratoren. Sie möchten wissen, ob sie einen Befehl senden können und die Kamera auf eine exakte Koordinate fährt. Die Antwort ist wichtig, da ihr gesamter Automatisierungs-Workflow davon abhängt.
Ja, das können Sie. ONVIF-Profil S11 und ONVIF Profil T12 unterstützen beide den AbsoluteMove Befehl. Sie senden eine SOAP-Anfrage mit normalisierten Schwenk-, Neige- und Zoomwerten, und die Kamera bewegt sich direkt zu dieser exakten Position. Die wichtigste Voraussetzung ist, dass Ihre PTZ-Hardware über absolute Encoder2 in den Motoren verfügen muss.
 ONVIF AbsoluteMove Befehl PTZ-Kamerasteuerung
ONVIF AbsoluteMove Befehl PTZ-Kamerasteuerung
Wie der ONVIF AbsoluteMove Befehl funktioniert
Das ONVIF-Protokoll verwendet normalisierte Werte anstelle von rohen Gradzahlen. Das bedeutet, dass Pan- und Tilt-Werte von $-1.0$ bis $+1.0$ reichen und Zoom von $0.0$ bis $1.0$. Ihr VMS oder Ihre Automatisierungsplattform wandelt reale Gradzahlen in diese normalisierten Werte um, bevor der Befehl gesendet wird.
Hier ist, wie eine typische ONVIF- AbsoluteMove SOAP-Anfrage in der Praxis aussieht:
<AbsoluteMove xmlns="http://www.onvif.org/ver20/ptz/wsdl">
<ProfileToken>MainStream</ProfileToken>
<Position>
<PanTilt x="0.0" y="0.25" />
<Zoom x="0.5" />
</Position>
</AbsoluteMove>In diesem Beispiel, x="0.0" entspricht Pan $180^{\circ}$ (der Mittelpunkt eines $360^{\circ}$-Bereichs) und y="0.25" entspricht Tilt $45^{\circ}$ (ein Viertel des Weges nach oben von der Mitte). Die genaue Zuordnung hängt vom Koordinatensystem der Kamera ab, aber die Logik ist bei allen ONVIF-konformen Geräten gleich.
Die Hardware hinter dem Befehl
Das Senden des Befehls ist der einfache Teil. Der schwierige Teil ist sicherzustellen, dass die Kamera tatsächlich dort landet, wo Sie sie hingeschickt haben. Dies hängt von einer Komponente ab: dem Absolutwertgeber.
Es gibt zwei Arten von Gebern in PTZ-Motoren:
| Merkmal | Inkrementalgeber | Absolutwertgeber |
|---|---|---|
| Position beim Einschalten | Unbekannt — muss neu initialisiert werden | Sofort bekannt |
| Drift über die Zeit | Fehlerakkumulation | Kein Drift |
| Kosten | Unter | Höher |
| Anwendungsfall | Consumer PTZ, grundlegende Voreinstellungen | Industrielle PTZ, Radarintegration |
| Genauigkeit | $\pm 1.0^{\circ}$ typisch | $\pm 0.1^{\circ}$ oder besser |
Eine Kamera mit inkrementellen Encodern3 kann immer noch einen AbsoluteMove Befehl empfangen. Aber nach einem Stromausfall verliert sie ihren Referenzpunkt. Sie muss eine “Homing”-Routine ausführen – sich bis zum physischen Anschlag drehen –, bevor sie wieder weiß, wo sie sich befindet. Während dieser Zeit ist Ihr Automatisierungssystem blind.
Ein Absolutwertgeber kennt seine genaue Position, sobald Strom angelegt wird. Kein Homing. Keine Verzögerung. Deshalb empfehle ich immer Absolutwertgeber für Projekte, die automatische Verfolgung oder GIS-Integration beinhalten.
Umrechnungsformel: Grad in normalisierte Werte
Wenn Ihre Automatisierungsplattform in Grad arbeitet, ONVIF aber normalisierte Werte benötigt, hier ist die grundlegende Mathematik:
$$x_{pan} = \frac{(\text{Zielschwenken} – 180)}{180}$$
$$y_{tilt} = \frac{\text{Zielneigung}}{90}$$
Also für Schwenken $180^{\circ}$, Neigen $45^{\circ}$:
- $x_{pan} = \frac{(180 – 180)}{180} = 0.0$
- $y_{tilt} = \frac{45}{90} = 0.5$
Diese Formel funktioniert für die meisten Kameras, aber überprüfen Sie immer die Koordinatenzuordnung des Herstellers. Einige Kameras definieren $0^{\circ}$ als Norden, andere definieren es als die Position beim Einschalten.
Ermöglicht die Funktion für absolute Positionierung eine bessere Integration mit GIS-Karten?
Ich habe gesehen, wie Projekte gescheitert sind, weil der Integrator seine Kartensoftware nicht mit der PTZ-Kamera verknüpfen konnte. Sie hatten ein schönes GIS-Dashboard, aber die Kamera saß einfach da und tat nichts, wenn ein Alarm ausgelöst wurde. Das ist eine schmerzhafte Verschwendung von Budget.
Absolute Positionierung ist der Schlüssel, der die echte GIS-Integration ermöglicht4. Wenn Ihre Kamera ihre exakten Schwenk- und Neigungswinkel meldet, kann Ihre GIS-Software genau berechnen, was die Kamera auf der Karte betrachtet. Und wenn Sie auf einen Punkt auf der Karte klicken, kann die Software diese GPS-Koordinate in einen Schwenk-/Neigungsbefehl umwandeln und die Kamera sofort dorthin bewegen.
 GIS-Kartenintegration mit PTZ-Absolutpositionierung
GIS-Kartenintegration mit PTZ-Absolutpositionierung
Die Mathematik hinter der GIS-zu-PTZ-Konvertierung
Um eine GIS-Karte mit einer PTZ-Kamera zu verknüpfen, benötigen Sie drei Informationen:
- GPS-Standort der Kamera — Breitengrad und Längengrad der Montageposition der Kamera.
- Montageausrichtung der Kamera — welche Himmelsrichtung die Kamera bei $0^{\circ}$ Schwenkstellung anzeigt.
- GPS-Standort des Ziels — der Punkt auf der Karte, auf den die Kamera blicken soll.
Mit diesen drei Eingaben berechnen Sie den Azimut13 (Kurs) von der Kamera zum Ziel:
$$\text{Azimut} = \arctan2\left(\sin(\Delta\lambda) \cdot \cos(\phi_2),\ \cos(\phi_1) \cdot \sin(\phi_2) – \sin(\phi_1) \cdot \cos(\phi_2) \cdot \cos(\Delta\lambda)\right)$$
Wobei $\phi_1$ die Kameraposition (Breitengrad), $\phi_2$ die Zielposition (Breitengrad) und $\Delta\lambda$ die Differenz der Längengrade ist. Das Ergebnis liefert Ihnen den Schwenkwinkel. Die Neigung wird basierend auf Entfernung und Höhenunterschied berechnet.
Warum relative Bewegung die GIS-Integration unterbricht
Bei relativer Bewegung können Sie nur sagen: “Drehe dich 5 Grad nach links.” Aber GIS-Software denkt nicht in relativen Begriffen. Sie denkt in absoluten Koordinaten. Wenn das GIS-System berechnet, dass ein Ziel bei Azimut $237^{\circ}$ liegt, muss es senden Schwenken = 237° direkt. Es gibt keine zuverlässige Methode, dies mit relativen Befehlen zu tun, da:
- Sie die aktuelle Position der Kamera nicht genau kennen.
- Netzwerk-Latenz macht “Stopp”-Befehle unzuverlässig.
- Kleine Fehler summieren sich über mehrere Bewegungen.
Real-World GIS-Integrationsarchitektur
Hier ist, wie ein vollständiger GIS-PTZ-Integrationsstapel aussieht:
| Ebene | Komponente | Rolle |
|---|---|---|
| Detektion | Radar / Perimeter-Sensor | Erkennt Einbruch, gibt GPS-Koordinaten aus |
| Verarbeitung | GIS-Server (z. B. ArcGIS, QGIS) | Konvertiert GPS in Kamera-Azimutwinkel |
| Befehl | ONVIF-Client / HTTP-API | Sendet AbsoluteMove an PTZ-Kamera |
| Rückmeldung | PTZ-Statusabfrage | Bestätigt, dass die Kamera die Zielposition erreicht hat |
| Anzeige | VMS / Web-Dashboard | Zeigt Live-Video mit Kartenüberlagerung an |
Die Rückkopplungsschleife ist entscheidend. Nach dem Senden des Befehls sollte Ihr System den PTZ-Status abfragen, um zu bestätigen, dass er tatsächlich den Zielwinkel erreicht hat. Hier beweisen absolute Encoder ihren Wert – die gemeldete Position entspricht der Realität.
Praktische Tipps für die Feldinstallation
Nach meiner Erfahrung mit Integratoren bei Außenprojekten gibt es ein paar Dinge, die die Genauigkeit Ihrer GIS-zu-PTZ-Daten beeinträchtigen können:
- Mastschwankung durch Wind. Ein 10-Meter-Mast kann bei 30 mph Wind um 1° bis 2° schwanken. Bei einer Entfernung von 500 Metern entspricht dies einem Fehler von 9 bis 17 Metern am Boden.
- Magnetische Deklination. Wenn Sie den Norden Ihrer Kamera mit einem Kompass kalibrieren, denken Sie daran, dass der magnetische Norden nicht der wahre Norden ist. In Texas kann der Unterschied 4° bis 8° betragen.
- Montageausrichtung. Selbst ein Fehler von 0,5°, wie die Kamera am Halter montiert ist, wirkt sich auf jeden einzelnen GIS-Befehl aus.
Ich empfehle immer, eine Feldkalibrierung nach der Installation durchzuführen. Wählen Sie drei bekannte Orientierungspunkte, notieren Sie deren GPS-Koordinaten, befehlen Sie der Kamera, sich auf jeden auszurichten, und messen Sie den Versatz. Wenden Sie dann einen Korrekturfaktor in Ihrer Software an.
Wie genau ist die gradbasierte Koordinatenrückgabe, wenn ich den PTZ-Status abfrage?
Ich hatte Kunden, die mir sagten, dass ihre früheren PTZ-Kameras einen Winkel meldeten, aber tatsächlich woandershin zeigten. Wenn Sie ein automatisiertes System aufbauen, sind schlechte Positionsdaten schlimmer als gar keine Daten.
Bei industrietauglichen PTZ-Kameras mit absoluten Encodern liegt die Genauigkeit der Positionsabfrage typischerweise innerhalb von ±0,1°. Sie können die aktuellen Schwenk-, Neige- und Zoomwerte jederzeit über ONVIF Status abrufen oder HTTP-API-Aufrufe abfragen. Die zurückgegebenen Werte spiegeln die tatsächliche physische Position der Motoren wider, nicht nur die zuletzt befohlene Position.
 Genauigkeit der PTZ-Statusabfrage, Rückgabe von gradbasierten Koordinaten
Genauigkeit der PTZ-Statusabfrage, Rückgabe von gradbasierten Koordinaten
Funktionsweise von Positionsabfragen
Wenn Sie eine Status abrufen Anfrage über ONVIF senden, liest die Kamera die aktuellen Encoderwerte aus und wandelt sie in normalisierte Koordinaten um. Die Antwort sieht wie folgt aus:
<GetStatusResponse>
<PTZStatus>
<Position>
<PanTilt x="-0.333" y="0.125" />
<Zoom x="0.75" />
</Position>
<MoveStatus>
<PanTilt>IDLE</PanTilt>
<Zoom>IDLE</Zoom>
</MoveStatus>
</PTZStatus>
</GetStatusResponse>Die Bewegungsstatus Feld gibt an, ob sich die Kamera noch bewegt oder ihr Ziel erreicht hat. Dies ist wichtig für die Automatisierung – Sie sollten keinen Schnappschuss aufnehmen, bis der Status dies anzeigt IDLE.
Quellen für Positionsfehler
Selbst bei Absolutwertgebern gibt es Faktoren, die die Genauigkeit beeinflussen:
Mechanisches Spiel
Spiel ist der kleine Spalt zwischen Zahnrädern. Wenn der Motor die Richtung umkehrt, müssen die Zahnräder diesen Spalt “aufnehmen”, bevor sich die Kamera tatsächlich zu bewegen beginnt. Der Geber kann die Motorposition korrekt melden, aber die Kameralinse zeigt aufgrund des Zahnradspiels leicht daneben.
Gute PTZ-Kameras beinhalten Spielkompensation14 in ihrer Firmware. Das bedeutet, dass der Motor absichtlich übersteuert und sich dann jedes Mal von derselben Richtung dem Ziel nähert, wodurch der Fehler des Zahnradspiels eliminiert wird.
Temperatureffekte
Metallzahnräder dehnen sich bei Temperatur aus und ziehen sich zusammen. In einem texanischen Sommer kann das Kameragehäuse intern $70^{\circ}C$ erreichen. Dies kann die Zahnradpaarung um einen winzigen Betrag verschieben. Über eine $360^{\circ}$-Drehung kann der kumulative Fehler $0.2^{\circ}$ bis $0.3^{\circ}$ erreichen.
Genauigkeitsvergleich nach Kameraklasse
| Kameraklasse | Geber Typ | Typische Genauigkeit | Position Abfrage Aktualisierungsrate |
|---|---|---|---|
| Verbraucher / Prosumer | Inkrementell | $\pm 1.0^{\circ}$ bis $\pm 2.0^{\circ}$ | 1 Hz |
| Mittelklasse Gewerbe | Inkrementeller + Home-Sensor | $\pm 0,5^{\circ}$ | 2-5 Hz |
| Industrie- / Militärqualität | Absolut (Mehrfachumdrehung) | $\pm 0.05^{\circ}$ bis $\pm 0.1^{\circ}$ | 10+ Hz |
Warum die Abfragegeschwindigkeit wichtig ist
Wenn Sie radargesteuerte automatische Verfolgung durchführen, muss die Kamera ihre Position schnell genug melden, damit der Verfolgungsalgorithmus Korrekturen berechnen kann. Eine Aktualisierungsrate von 1 Hz bedeutet, dass das System nur einmal pro Sekunde weiß, wo sich die Kamera befindet. Bei einer Schwenkgeschwindigkeit von $400^{\circ}/s$ kann sich die Kamera zwischen den Aktualisierungen um $400^{\circ}$ bewegen. Das ist für die Verfolgung nutzlos.
Industrielle PTZ-Kameras aus unserer Fabrik unterstützen Abfragegeschwindigkeiten von 10 Hz oder höher. Dies liefert dem Verfolgungsalgorithmus genügend Daten, um reibungslose und genaue Korrekturen in Echtzeit vorzunehmen.
Selbstkalibrierung und Driftkorrektur
Selbst die beste Hardware driftet über Monate kontinuierlichen Betriebs. Ich empfehle, eine geplante Selbstkalibrierungsroutine:
- Befehlen Sie die Kamera alle 24 Stunden zu einer bekannten Voreinstellung (z. B. einem Wahrzeichen mit bekannten Koordinaten).
- Verwenden Sie Videoanalysen, um das Wahrzeichen im Bild zu erkennen.
- Messen Sie den Pixelversatz vom Bildmittelpunkt.
- Berechnen Sie die Winkelkorrektur und wenden Sie sie als Offset in Ihrer Steuerungssoftware an.
Dieser Closed-Loop-Ansatz hält Ihr System über Jahre hinweg genau, ohne manuelles Eingreifen.
Wird die absolute Positionierung von allen großen VMS-Marken wie Genetec und Exacq unterstützt?
Ich weiß, dass diese Frage Integratoren schlaflose Nächte bereitet. Sie wählen eine Kamera aus, installieren sie vor Ort und stellen dann fest, dass Ihr VMS keine absoluten Befehle an sie senden kann. Jetzt haben Sie eine Kamera für 3.000 $, die nur eine relative Joystick-Steuerung bietet. Ich habe das schon zu oft erlebt.
Die meisten großen VMS-Plattformen – darunter Genetec Security Center, Exacq exacqVision, Milestone XProtect und sogar Open-Source-Optionen wie Blue Iris – unterstützen ONVIF AbsoluteMove-Befehle. Allerdings variiert der Grad der Unterstützung. Einige Plattformen bieten eine vollständige Koordinatensteuerung in ihrer Benutzeroberfläche, während andere sie nur über ihre API oder ihr SDK unterstützen. Testen Sie immer die spezifische VMS-Version mit Ihrem Kameramodell, bevor Sie sich für eine große Bereitstellung entscheiden.
 VMS-Kompatibilität absolute Positionierung Genetec Exacq Milestone
VMS-Kompatibilität absolute Positionierung Genetec Exacq Milestone
Die Kompatibilitätsrealität
Auf dem Papier sollte jedes VMS, das ONVIF Profil S-Konformität beansprucht, AbsoluteMove. In der Praxis gibt es Lücken. Einige VMS-Plattformen implementieren nur die Joystick-ähnlichen KontinuierlicheBewegung und RelativeBewegung Befehle, da diese einfacher in eine Benutzeroberfläche zu integrieren sind. Der AbsoluteMove Befehl erfordert, dass das VMS ein Koordinatensystem pflegt, Winkelwerte anzeigt und die Umrechnung von normalisierten Werten in Grad handhabt – was mehr Entwicklungsaufwand bedeutet.
Plattform-für-Plattform-Aufschlüsselung
Hier ist, was ich in realen Tests gesehen habe:
Genetec Security Center7 unterstützt absolute Positionierung über sein Kartenmodul. Sie können Kameras auf einer Karte platzieren, ihr Sichtfeld definieren und per Klick verfolgen. Das System sendet im Hintergrund ONVIF AbsoluteMove Befehle. Dies funktioniert gut, aber Sie benötigen die richtige Lizenzstufe – die Basislizenz beinhaltet keine kartenbasierte PTZ-Steuerung.
Meilenstein XProtect9 verfügt über eine starke ONVIF-Unterstützung und bietet absolute Positionierung über seinen Smart Client und das MIP SDK. Wenn Sie eine benutzerdefinierte Integration erstellen – z. B. ein Radarsystem mit Milestone verbinden – können Sie das SDK verwenden, um absolute Befehle programmatisch zu senden. Die Standard-Benutzeroberfläche zeigt auch Pan/Tilt/Zoom-Koordinaten an, wenn Sie mit der Maus über das PTZ-Bedienfeld fahren.
Exacq exacqVision8 unterstützt ONVIF absolute Positionierung, aber die Benutzeroberfläche ist eingeschränkter. Sie können Voreinstellungen mit absoluten Koordinaten festlegen, aber die Echtzeit-Koordinateneingabe ist nicht so reibungslos wie bei Genetec oder Milestone. Für die meisten Projekte ist dies in Ordnung – Sie legen Ihre Voreinstellungen während der Inbetriebnahme fest und lösen sie dann über Alarme aus.
Blaue Schwertlilie10 ist bei kleineren Integratoren und technisch versierten Endbenutzern beliebt. Es unterstützt ONVIF und kann absolute Befehle über seine HTTP-API senden. Die Desktop-Benutzeroberfläche ist einfach, aber die API ist leistungsstark. Viele meiner Kunden verwenden Blue Iris mit n8n oder Node-RED, um benutzerdefinierte Automatisierungsworkflows zu erstellen.
Was Sie vor dem Kauf testen sollten
Bevor Sie sich für eine Kamera-VMS-Kombination für ein großes Projekt entscheiden, empfehle ich Ihnen, diese drei Tests durchzuführen:
Test 1: AbsoluteMove Round-Trip
Senden Sie einen AbsoluteMove Befehl vom VMS an eine bestimmte Koordinate. Fragen Sie dann die Position der Kamera über ONVIF ab Status abrufen. Vergleichen Sie die befohlene Position mit der gemeldeten Position. Sie sollten innerhalb von ± 0,1° übereinstimmen.
Test 2: Preset-Genauigkeit nach Stromausfall
Stellen Sie fünf Presets mit absoluten Koordinaten ein. Schalten Sie die Kamera aus und wieder ein. Rufen Sie jedes Preset auf und prüfen Sie, ob die Kamera an exakt dieselbe Position zurückkehrt. Wenn sie um mehr als 0,3° abweicht, verwendet die Kamera wahrscheinlich inkrementelle Encoder und ist nicht für absolute Positionierungs-Workflows geeignet.
Test 3: Geschwindigkeit der AbsoluteMove-Ausführung
Weisen Sie die Kamera an, sich von Pan 0° zu Pan 180° zu bewegen. Messen Sie die Zeit. Eine gute industrielle PTZ sollte dies bei maximaler Schwenkgeschwindigkeit (400°/s oder höher) in weniger als 2 Sekunden erledigen. Wenn es länger dauert, hat der Motor oder die Kommunikationsleitung eine Engstelle.
Der OEM/ODM-Vorteil
Eines sage ich Integratoren immer: Wenn Ihr VMS spezifische Anforderungen an die Formatierung von PTZ-Befehlen hat, können wir die Kamera-Firmware entsprechend anpassen. Als F&E-gesteuerter Hersteller kontrollieren wir den gesamten Firmware-Stack. Wir können das ONVIF-Antwortformat anpassen, benutzerdefinierte CGI-Endpunkte hinzufügen oder sogar proprietäre Protokolle implementieren, wenn Ihr Projekt dies erfordert. Das ist der Vorteil der direkten Zusammenarbeit mit einer Fabrik, anstatt über ein Handelsunternehmen zu gehen, das keine einzige Codezeile ändern kann.
Schlussfolgerung
Absolute Positionierung verwandelt Ihre PTZ-Kamera von einem manuellen Werkzeug in einen programmierbaren Sensor. Mit den richtigen Encodern, Protokollen und der VMS-Integration erhalten Sie eine präzise, wiederholbare und automatisierte Steuerung, die eine relative Bewegung einfach nicht liefern kann.
1. Erfahren Sie, wie absolute Positionierung präzise, wiederholbare Kamerabewegungen zu exakten Koordinaten ermöglicht. ︎↩︎ 2. Absolute Encoder liefern sofortiges, driftfreies Positionsfeedback ohne erneutes Homing. ︎↩︎ 3. Inkrementelle Encoder verlieren bei Stromausfall die Position und erfordern Homing, was die Zuverlässigkeit der Automatisierung einschränkt. ︎↩︎ 4. Erfahren Sie, wie Geoinformationssysteme mit PTZ-Kameras für koordinatenbasierte Verfolgung verwendet werden. ︎↩︎ 5. Pelco-D ist ein weit verbreitetes RS-485-Protokoll, das absolute PTZ-Positionierungsbefehle unterstützt. ︎↩︎ 6. HTTP-APIs ermöglichen das Senden von absoluten PTZ-Befehlen über einfache URL-Anfragen über IP-Netzwerke. ︎↩︎ 7. Genetec's VMS unterstützt die absolute PTZ-Steuerung über sein Kartenmodul und die ONVIF-Integration. ︎↩︎ 8. ExacqVision unterstützt die ONVIF-Absolute-Positionierung für Preset-basierte PTZ-Steuerung. ︎↩︎ 9. Milestone XProtect stellt die absolute PTZ-Positionierung über seinen Smart Client und das MIP SDK bereit. ︎↩︎ 10. Blue Iris unterstützt ONVIF-Absolute-Befehle über seine HTTP-API für benutzerdefinierte Automatisierungs-Workflows. ︎↩︎ 11. ONVIF Profil S definiert grundlegende Video-Streaming- und PTZ-Steuerung, einschließlich AbsoluteMove. ︎↩︎ 12. ONVIF Profil T erweitert Profil S um erweiterte Funktionen wie Audio- und Metadatenunterstützung. ︎↩︎ 13. Azimut ist die Kompassrichtung, die zur Berechnung des Schwenkwinkels von einer Kamera zu einem GIS-Ziel verwendet wird. ︎↩︎ 14. Spielkompensation eliminiert Zahnspiel für präzise PTZ-Positionierung, insbesondere beim Richtungswechsel. ︎↩︎