
Já vi câmeras PTZ se desviarem do alvo após apenas algumas centenas de ciclos predefinidos. Esse pequeno deslocamento pode lhe custar um projeto inteiro.
Mantemos o desvio da predefinição abaixo de ±0,1° combinando 256 drivers de motor de micro-passo, transmissão por correia reforçada com Kevlar, algoritmos de movimento de curva S e calibração de ponto zero com foto-interruptor. Essas quatro camadas trabalham juntas para que cada preset retorne exatamente ao mesmo ponto, mesmo após milhares de ciclos.
 Teste de precisão de posicionamento predefinido da câmera PTZ
Teste de precisão de posicionamento predefinido da câmera PTZ
Neste artigo, eu o orientarei sobre cada parte desse sistema. Também mostrarei um método de teste prático que você mesmo pode usar para verificar a precisão de 0,1°, antes de assinar qualquer remessa. Vamos ao que interessa.
Minha câmera perderá a posição “inicial” após 10.000 ciclos de panorâmica e inclinação?
Essa é a pergunta que tira o sono de todo integrador. Você instala 50 câmeras em uma rodovia e, seis meses depois, metade delas está apontando para a pista errada.
Não. Nossas câmeras PTZ não perdem a posição inicial após 10.000 ciclos. Cada unidade passa por um teste de estresse de 3.000 ciclos antes de ser enviada. O foto-interruptor físico redefine o ponto zero a cada inicialização, de modo que o desvio eletrônico nunca se acumula em um deslocamento permanente.
 Teste de ciclo da posição inicial da câmera PTZ
Teste de ciclo da posição inicial da câmera PTZ
Por que as predefinições se desviam em primeiro lugar?
A maior parte dos desvios de predefinição vem de três fontes: perda de passo do motor, alongamento da correia e erros do contador eletrônico. Vou detalhar cada uma delas.
Perda de passo do motor acontece quando um motor de passo 1 se move muito rápido e pula uma etapa. Cada etapa pulada acrescenta um pequeno erro de ângulo. Ao longo de centenas de ciclos, esses erros se acumulam. A câmera acha que está a 90°, mas na verdade está a 90,3°. Em um zoom de 40X, esse 0,3° significa que o alvo está completamente fora da tela.
Alongamento do cinto é um problema mecânico. As correias de borracha baratas se expandem quando ficam quentes. Em um deserto ou em uma instalação no telhado, a temperatura da caixa pode chegar a 60°C ou mais. A correia fica mais longa, a relação de transmissão muda ligeiramente e a predefinição muda.
Erros do contador eletrônico são os mais sorrateiros. O controlador conta os pulsos do motor para rastrear a posição. Mas ruídos elétricos, falhas de energia ou erros de firmware podem corromper esse contador. A câmera não tem como saber que está errada, a menos que tenha um ponto de referência físico para verificar.
Como resolvemos cada problema
| Fonte de deriva | Nossa solução | Resultado |
|---|---|---|
| Perda de passo do motor | Driver de 256 micro-passos com controle de corrente | Ângulo mínimo de passo < 0,05°, praticamente sem saltos |
| Alongamento do cinto | Correia de sincronização reforçada com Kevlar | Expansão térmica quase nula, mesmo a 60°C |
| Erro no contador eletrônico | Reinicialização do ponto zero do foto-interruptor em cada inicialização | Os erros acumulados são eliminados automaticamente |
O teste de fábrica de 3.000 ciclos
Antes de qualquer unidade sair de nossa fábrica, montamos um apontador a laser no cabeçote PTZ. Nós o programamos para percorrer 256 predefinições continuamente por 24 horas, ou seja, mais de 3.000 ciclos completos. Uma placa de alvo fixo fica na extremidade mais distante da sala de teste. Medimos a posição do ponto do laser após cada ciclo. Se o ponto se desviar mais do que o equivalente a 0,1° em uma única predefinição, a unidade será reprovada. Ela não é enviada.
Este não é um teste de amostra. Nós o executamos em todas as câmeras. David, se quiser, podemos lhe enviar o relatório do teste com fotos do alvo do laser para o seu lote específico.
Como o codificador de alta precisão evita que a predefinição se “desvie” com o tempo?
Conversei com integradores que substituíram frotas inteiras de câmeras depois de dois anos porque as predefinições tinham se desviado tanto que as câmeras eram inúteis. Isso é um enorme desperdício de dinheiro.
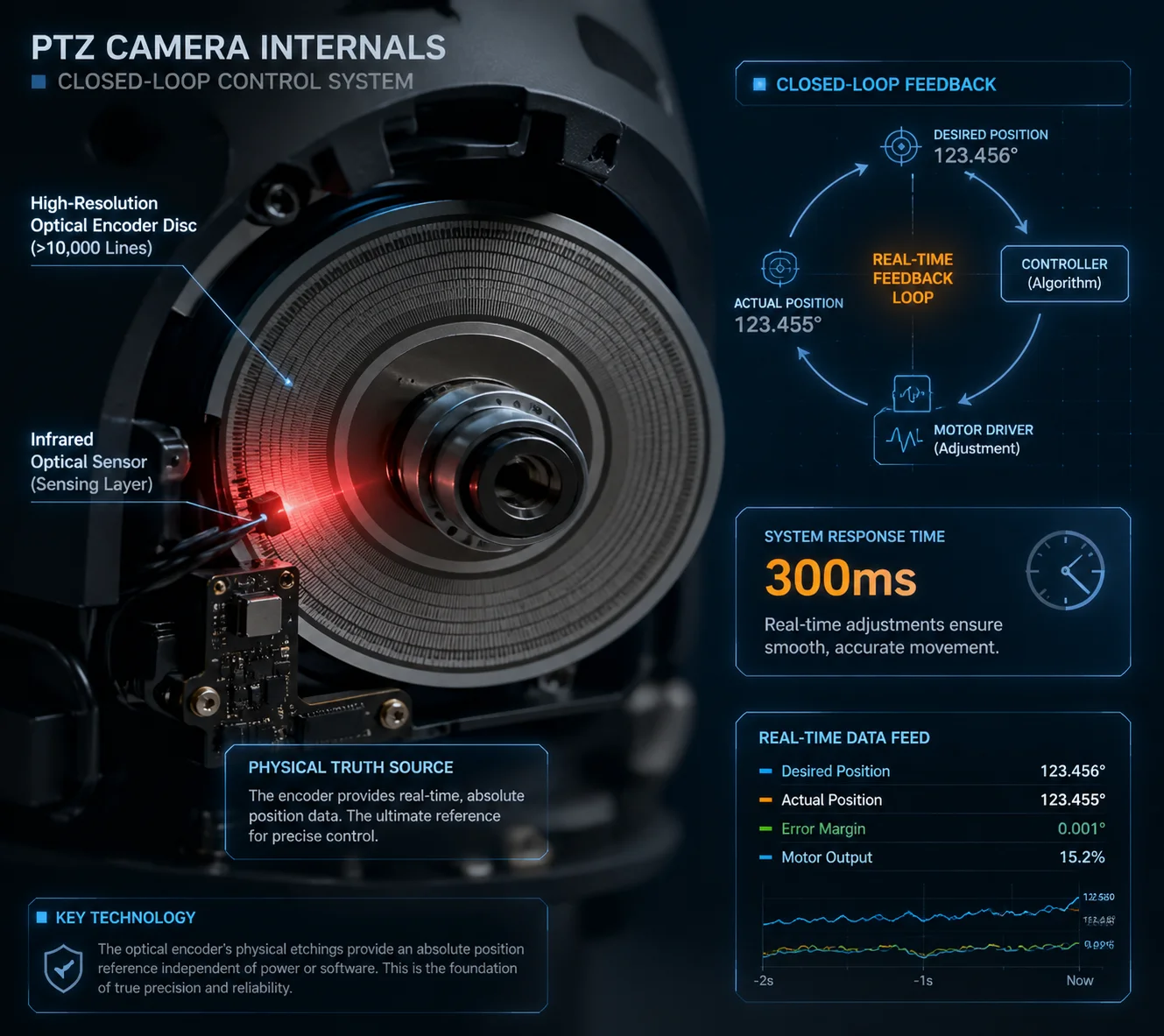
Nosso codificador óptico de alta precisão atua como uma fonte de verdade física. Ele monitora continuamente a posição angular real dos eixos de pan e tilt. Se a posição real se desviar da posição comandada, mesmo que seja por uma fração de grau, o sistema a corrigirá em 300 milissegundos.
 Codificador óptico de alta precisão para câmera PTZ
Codificador óptico de alta precisão para câmera PTZ
Circuito aberto vs. circuito fechado: Por que é importante
A maioria das câmeras PTZ econômicas usa um sistema de loop aberto. O controlador envia um comando: “Mova 500 passos para a direita”. O motor se move 500 passos. O controlador presume que a câmera está agora no ângulo correto. Mas ele nunca verifica.
É como dirigir com os olhos fechados. Você gira o volante 30 graus e espera estar na pista certa. Isso funciona por um tempo. Depois, não funciona mais.
Um sistema de circuito fechado adiciona um sensor que lê constantemente a posição real. Se o motor ultrapassar 2 passos, o sensor percebe e o controlador envia uma correção. Essa é a diferença entre ter esperança e saber.
Como funciona nosso sistema de codificação
Nosso sistema de codificação tem duas camadas:
Camada 1: Sensor de ponto zero do foto-interruptor. Esse é um componente simples, mas essencial. Uma pequena porta óptica fica em uma posição física fixa nos eixos de pan e tilt. Sempre que a câmera é ligada, ela gira até atingir essa porta. Essa é a referência zero absoluta. Todas as posições predefinidas são calculadas a partir desse ponto. Isso significa que, mesmo que o contador eletrônico tenha sido corrompido durante uma queda de energia, a câmera encontrará seu verdadeiro zero na próxima inicialização. O erro acumulado é eliminado.
Camada 2: disco óptico de alta resolução (opcional para projetos de alta qualidade). Para instalações críticas - vigilância de fronteiras, perímetros de aeroportos, monitoramento de rodovias - oferecemos um sistema opcional de alta resolução codificador óptico 2 disco. Esse disco tem milhares de linhas gravadas com precisão. Um sensor lê essas linhas em tempo real à medida que a câmera se move. O resultado é um feedback contínuo e absoluto da posição.
O que acontece quando o vento empurra a câmera?
Esse é um cenário do mundo real que a maioria das planilhas de especificações ignora. Uma forte rajada de vento atinge o compartimento da câmera. A cabeça se move 0,2° em relação à sua predefinição. Sem um codificador, a câmera não sabe que se moveu. Ela simplesmente fica parada, apontando para o ponto errado.
Com nosso codificador óptico, o sistema detecta o deslocamento instantaneamente. Em 300 milissegundos, o motor é ativado e empurra o cabeçote de volta para a posição correta. O operador nem sequer vê isso acontecer.
| Tipo de sistema | Detecta distúrbios externos? | Autocorreção? | Desvio de longo prazo |
|---|---|---|---|
| Circuito aberto (sem codificador) | Não | Não | Acumula-se ao longo do tempo |
| Somente ponto zero | Não (somente na reinicialização) | Somente na reinicialização | Reinicia a cada ciclo de energia |
| Codificador óptico completo | Sim, em tempo real | Sim, dentro de 300 ms | Efetivamente zero |
Posso realizar uma calibração remota se a precisão predefinida começar a se degradar?
Você tem 200 câmeras espalhadas por três estados. Uma delas começa a apresentar um desvio predefinido. Não é possível enviar um técnico a cada local apenas para recalibrar uma câmera.
Sim. Você pode acionar uma recalibração remota do ponto zero por meio da interface da Web ou do seu VMS. A câmera executará automaticamente sua rotina de localização, encontrará o sensor físico de ponto zero e redefinirá todas as referências predefinidas. Não é necessária nenhuma visita ao local.
 Interface de calibração remota da câmera PTZ
Interface de calibração remota da câmera PTZ
Quando você deve recalibrar?
Na maioria dos casos, você nunca precisará recalibrar manualmente. A câmera faz isso automaticamente a cada inicialização. Mas há algumas situações em que uma recalibração remota manual faz sentido:
- Após uma atualização de firmware que altera os parâmetros de controle do motor.
- Após a câmera ter funcionado continuamente por vários meses sem ser reiniciada.
- Depois de um evento físico conhecido, como uma tempestade forte, um terremoto ou alguém batendo na câmera durante a manutenção.
- Quando você notar em seu VMS que uma predefinição está ligeiramente fora de onde deveria estar.
Como funciona o processo de calibração remota
O processo é simples. Faça login na interface da Web da câmera. Vá para a página de configurações PTZ. Você clica em “Home Reset” ou “Zero-Point Calibration”. A câmera fará a panorâmica e a inclinação até encontrar a porta do foto-interruptor em cada eixo. Isso leva cerca de 10 segundos. Depois disso, todas as 256 predefinições são recalculadas a partir da nova referência zero.
Você também pode programar isso automaticamente. Por exemplo, você pode configurar a câmera para recalibrar às 3:00 AM todos os domingos. Durante essa janela de 10 segundos, a câmera se move brevemente para encontrar o ponto zero e, em seguida, retorna à sua patrulha ou predefinição. Para a maioria dos projetos, isso é mais do que suficiente para manter o desvio em zero.
Um método de verificação prático que você pode usar
Após a recalibração, como saber se ela realmente funcionou? Aqui está um método que recomendo a todos os nossos parceiros integradores.
Escolha uma predefinição que aponte para um recurso fixo e de alto contraste - um canto de prédio, um poste, uma linha pintada. Faça uma captura de tela. Essa é sua imagem de referência. Anote as coordenadas de pixel desse recurso.
Após a recalibração, chame a mesma predefinição. Faça outra captura de tela. Compare as coordenadas de pixel. Se o recurso se moveu menos de 3 pixels (em um HFOV típico de 60° em um sensor de 1080p), você está dentro de 0,1°.
Você pode fazer isso de sua mesa. Sem escada. Sem rolar o caminhão. Nenhuma tarde desperdiçada.
Referência de conversão de pixel para ângulo
| FOV horizontal | Resolução | Graus por pixel | Pixels permitidos para 0,1° |
|---|---|---|---|
| 60° | 1920 px | 0.031° | ~3,2 px |
| 30° | 1920 px | 0.016° | ~6,4 px |
| 3° (zoom de 40X) | 1920 px | 0.0016° | ~64 px |
Observe algo interessante nessa tabela. Com zoom de 40X, o FOV é muito estreito, cerca de 3°. Isso significa que cada pixel cobre um ângulo muito menor. Portanto, 0,1° de desvio apareceria como uma mudança de 64 pixels na tela. Isso é enorme. Você o veria imediatamente. É por isso que a precisão mecânica é mais importante em níveis altos de zoom.
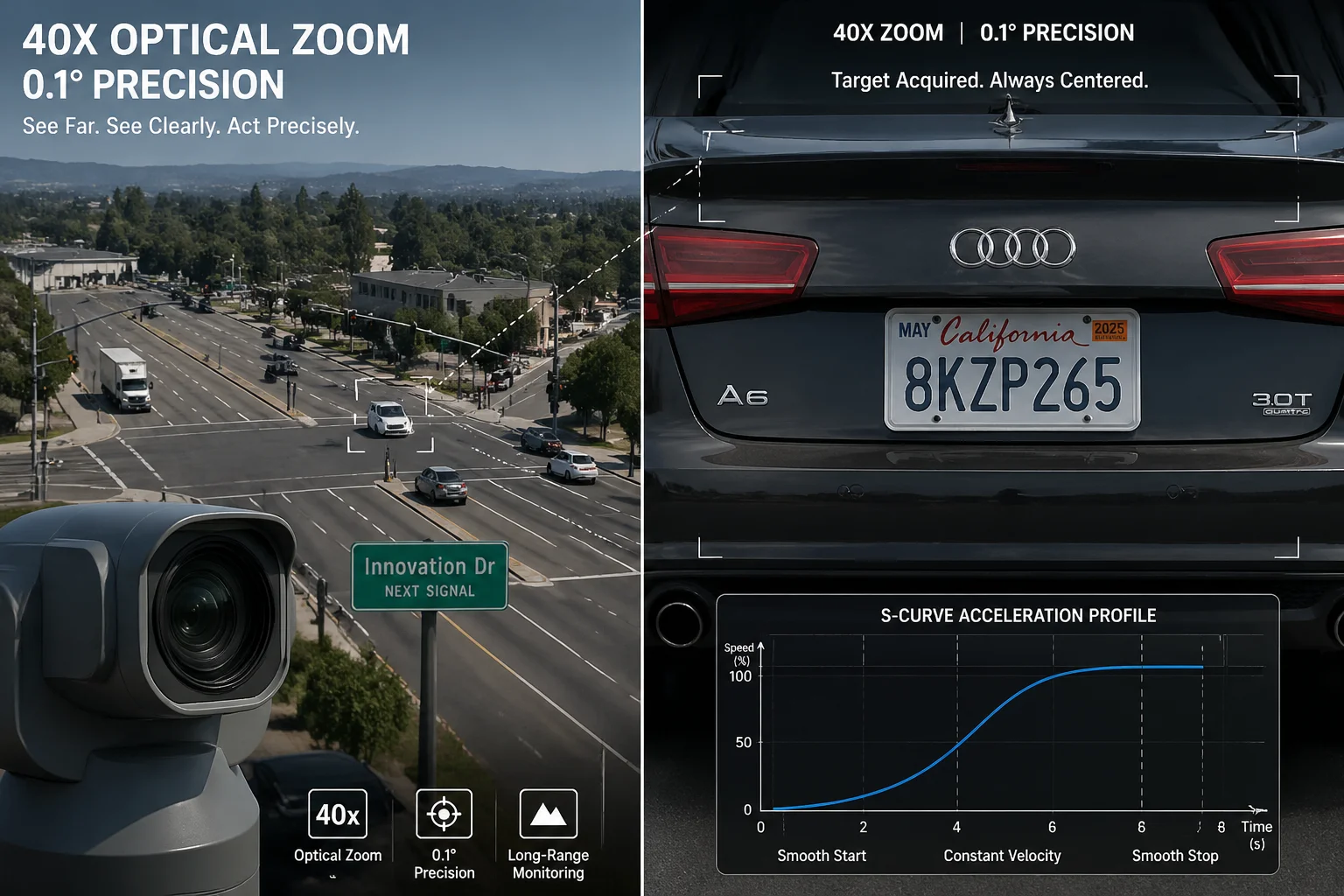
A precisão de 0,1 grau é mantida mesmo com o zoom óptico máximo de 40X?
Essa é a questão que separa as declarações de marketing da realidade da engenharia. Qualquer câmera pode atingir 0,1° em grande angular. O verdadeiro teste é com o zoom de 40X, onde cada pequeno erro é ampliado.
Sim. A precisão mecânica de 0,1° é uma propriedade do mecanismo de pan-tilt, não da lente. Ela permanece a mesma independentemente do nível de zoom. Mas, com zoom de 40X, o impacto visual de até mesmo 0,05° de erro torna-se muito óbvio, e é exatamente por isso que nossa precisão mecânica deve ser tão rigorosa.
 Precisão predefinida da câmera PTZ com zoom óptico de 40X
Precisão predefinida da câmera PTZ com zoom óptico de 40X
Por que o zoom amplia o problema
Vou explicar isso com um exemplo simples. Em grande angular (60° FOV), sua câmera vê uma área de 100 metros de largura a 500 metros de distância. Um erro de 0,1° desloca o centro da imagem em cerca de 0,87 metros. Você provavelmente nem perceberia.
Com o zoom de 40X, o FOV diminui para aproximadamente 1,5°. Agora, sua câmera vê apenas uma área de 13 metros de largura à mesma distância. Esse mesmo erro de 0,1° ainda desloca o centro em 0,87 metros. Mas agora 0,87 metro é uma parte significativa de todo o seu campo de visão. O rosto de uma pessoa que estava centralizado agora está na borda do quadro - ou desapareceu completamente.
É por isso que dizemos: a precisão predefinida não é uma especificação de zoom. É uma especificação mecânica. O motor, a correia, o codificador - eles não sabem nem se importam com o nível de zoom da lente. Eles só precisam colocar o cabeçote no ângulo correto. Sempre.
A engenharia por trás da precisão consistente
Três fatores tornam isso possível em nossa fábrica:
256 micro-passos de controle do motor. Ao dividir cada passo do motor de 1,8° em 256 micropassos, obtemos um ângulo mínimo controlável de cerca de 0,007°. Isso nos dá mais de 14 vezes a resolução necessária para uma precisão de 0,1°. Essa margem é intencional. Isso significa que ainda podemos atingir 0,1° mesmo que alguns micro-passos sejam perdidos devido ao atrito ou à carga.
Aceleração e desaceleração em curva S. Quando a câmera se move para uma predefinição, ela não para de repente. Ela segue um perfil de velocidade em forma de S - início lento, aceleração suave, desaceleração gradual, parada suave. Isso elimina o choque mecânico que causa o overshoot. Sem o controle de curva em S, um cabeçote PTZ em movimento rápido pode ultrapassar o alvo em 0,2° a 0,5° antes de se estabilizar. Com ele, a ultrapassagem é efetivamente zero.
Compensação dinâmica de desgaste. Nosso firmware rastreia quantos ciclos cada eixo completou. À medida que a contagem de ciclos aumenta, o algoritmo aplica um pequeno fator de correção para levar em conta o desgaste da correia e as alterações de atrito do rolamento. Esse não é um deslocamento fixo, é um valor aprendido que se atualiza ao longo da vida útil da câmera. O resultado é que uma câmera com 50.000 ciclos atinge as predefinições com a mesma precisão que uma unidade nova.
Como testar você mesmo com zoom de 40X
Se estiver avaliando nossas câmeras - ou qualquer câmera PTZ -, aqui está o que eu sugiro:
- Ajuste a câmera para o zoom de 40X.
- Aponte-a para um objeto distante com bordas afiadas (uma placa, uma moldura de janela, um poste).
- Salve isso como Predefinição 1.
- Mova a câmera para uma posição completamente diferente (Predefinição 2).
- Chame a predefinição 1 novamente.
- Compare a imagem com sua referência.
- Repita 50 vezes.
Se o recurso alvo permanecer dentro de 3 pixels em uma imagem de 1080p a 60° HFOV - ou dentro da contagem de pixels equivalente para o seu FOV real - a câmera passa. Se ela se desviar, você tem um problema. E você saberá disso antes de instalar uma única câmera em um poste.
Conclusão
A precisão predefinida abaixo de 0,1° é resultado de um hardware robusto, algoritmos inteligentes e autocalibração física, e não apenas de um número em uma folha de especificações. Teste-a. Verifique. Depois, confie nele.
1. Controle de malha aberta do motor de passo e riscos inerentes de perda de passo. ︎ 2. Codificador rotativo óptico para feedback de posição absoluta. ︎ 3. Propriedades de expansão térmica do cinturão reforçado com Kevlar. ︎ 4. Projeto do circuito de calibração do ponto zero do foto-interruptor. ︎ 5. Comparação de 256 micro-passos versus torque de passo completo e precisão. ︎ 6. Perfil de movimento em curva S para redução de choques mecânicos. ︎ 7. Algoritmo de compensação de desgaste dinâmico para precisão de longo prazo. ︎ 8. Conversão de pixel para ângulo para testes de verificação predefinidos. ︎ 9. Métodos de controle de motor PTZ de malha fechada versus malha aberta. ︎ 10. Serviço ONVIF PTZ para comandos de calibração remota. ︎