
J'ai vu des caméras PTZ s'écarter de leur cible après seulement quelques centaines de cycles de préréglage. Ce petit décalage peut vous coûter tout un projet.
Nous maintenons la déviation des préréglages à moins de ±0,1° en combinant 256 moteurs à micropas, une transmission par courroie renforcée en Kevlar, des algorithmes de mouvement à courbe en S et un étalonnage du point zéro par photo-interrupteur. Ces quatre couches travaillent ensemble pour que chaque préréglage revienne exactement au même endroit, même après des milliers de cycles.
 Test de précision du positionnement de la caméra PTZ
Test de précision du positionnement de la caméra PTZ
Dans cet article, je vous présenterai chaque élément de ce système. Je vous montrerai également une méthode de test pratique que vous pouvez utiliser pour vérifier vous-même la précision de 0,1° - avant de signer la livraison. Entrons dans le vif du sujet.
Mon appareil photo perdra-t-il sa position d'origine après 10 000 cycles de panoramique et d'inclinaison ?
C'est la question qui préoccupe tous les intégrateurs la nuit. Vous installez 50 caméras sur une autoroute et, six mois plus tard, la moitié d'entre elles sont orientées vers la mauvaise voie.
Non. Nos caméras PTZ ne perdent pas leur position d'origine après 10 000 cycles. Chaque unité subit un test de stress de 3 000 cycles avant d'être expédiée. Le photo-interrupteur physique réinitialise le point zéro à chaque mise sous tension, de sorte que la dérive électronique ne s'accumule jamais en un décalage permanent.
 Test de cyclage de la position initiale de la caméra PTZ
Test de cyclage de la position initiale de la caméra PTZ
Pourquoi les préréglages dérivent-ils en premier lieu ?
La plupart des dérives de préréglage proviennent de trois sources : la perte de pas du moteur, l'étirement de la courroie et les erreurs du compteur électronique. Permettez-moi d'analyser chacune de ces sources.
Perte de pas du moteur se produit lorsqu'un moteur pas à pas 1 se déplace trop rapidement et saute une étape. Chaque étape sautée ajoute une minuscule erreur d'angle. Sur des centaines de cycles, ces erreurs s'accumulent. La caméra pense qu'elle est à 90°, mais elle est en fait à 90,3°. Avec un zoom de 40X, ces 0,3° signifient que votre cible est complètement hors champ.
Étirement de la ceinture est un problème mécanique. Les courroies en caoutchouc bon marché se dilatent à la chaleur. Dans un désert ou sur un toit, la température du boîtier peut atteindre 60°C ou plus. La courroie s'allonge, le rapport de transmission change légèrement et le préréglage se modifie.
Erreurs de compteur électronique sont les plus sournoises. Le contrôleur compte les impulsions du moteur pour suivre la position. Mais le bruit électrique, les pannes de courant ou les bogues du micrologiciel peuvent corrompre ce compteur. La caméra n'a aucun moyen de savoir qu'elle se trompe, à moins qu'elle ne dispose d'un point de référence physique auquel se référer.
Comment nous résolvons chaque problème
| Source de dérive | Notre solution | Résultat |
|---|---|---|
| Perte de pas du moteur | 256 pilotes de micro-pas avec contrôle du courant | Angle de marche minimal < 0,05°, pratiquement pas de sauts de puce |
| Étirement de la ceinture | Courroie de distribution renforcée en Kevlar | Dilatation thermique quasi nulle, même à 60°C |
| Erreur du compteur électronique | Réinitialisation du point zéro du photo-interrupteur à chaque démarrage | Les erreurs accumulées sont éliminées automatiquement |
Le test de l'usine des 3 000 cycles
Avant qu'un appareil ne quitte notre usine, nous montons un pointeur laser sur la tête PTZ. Nous le programmons pour qu'il parcoure 256 préréglages en continu pendant 24 heures, soit plus de 3 000 cycles complets. Un tableau de cibles fixes se trouve à l'extrémité de la salle d'essai. Nous mesurons la position du point laser après chaque cycle. Si le point dérive de plus de l'équivalent de 0,1° sur un seul préréglage, l'unité est défaillante. Il n'est pas expédié.
Il ne s'agit pas d'un échantillon de test. Nous l'effectuons sur chaque caméra. David, si vous le souhaitez, nous pouvons vous envoyer le rapport de test avec des photos de la cible laser pour votre lot spécifique.
Comment le codeur de haute précision empêche-t-il le préréglage de “dériver” au fil du temps ?
J'ai parlé à des intégrateurs qui ont remplacé des parcs entiers de caméras au bout de deux ans parce que les préréglages avaient tellement dérivé que les caméras étaient devenues inutiles. Il s'agit là d'un énorme gaspillage d'argent.
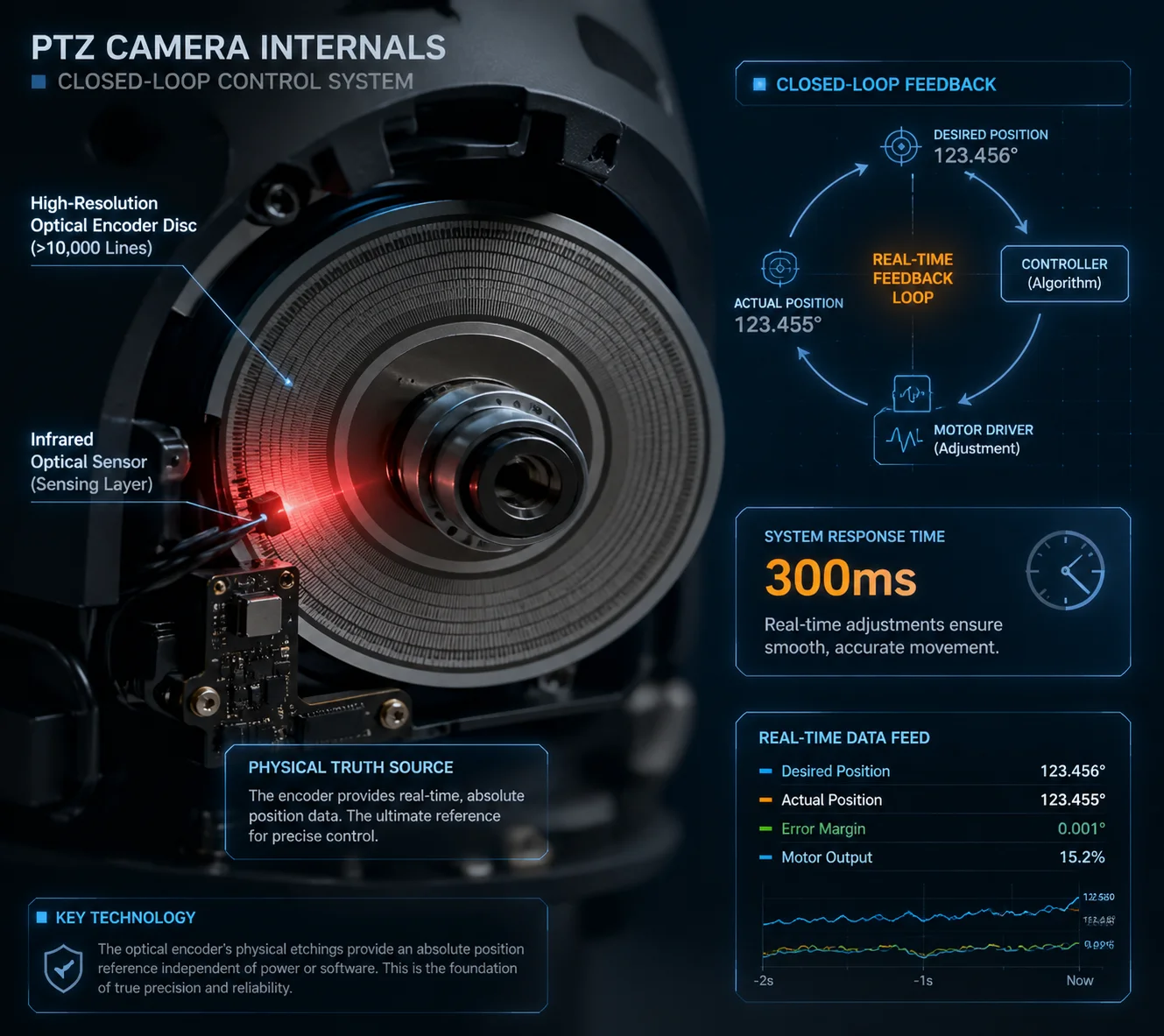
Notre codeur optique de haute précision agit comme une source de vérité physique. Il surveille en permanence la position angulaire réelle des axes de panoramique et d'inclinaison. Si la position réelle s'écarte de la position commandée, même d'une fraction de degré, le système la corrige en moins de 300 millisecondes.
 Encodeur optique de haute précision pour caméra PTZ
Encodeur optique de haute précision pour caméra PTZ
Boucle ouverte ou boucle fermée : Pourquoi c'est important
La plupart des caméras PTZ bon marché utilisent un système en boucle ouverte. Le contrôleur envoie une commande : “Déplacez-vous de 500 pas vers la droite”. Le moteur se déplace de 500 pas. Le contrôleur suppose que la caméra est maintenant à l'angle correct. Mais il ne vérifie jamais.
C'est comme conduire les yeux fermés. Vous tournez le volant de 30 degrés et vous espérez être dans la bonne voie. Cela fonctionne pendant un certain temps. Puis ce n'est plus le cas.
Un système en boucle fermée ajoute un capteur qui lit constamment la position réelle. Si le moteur dépasse de deux pas, le capteur le voit et le contrôleur envoie une correction. C'est la différence entre espérer et savoir.
Fonctionnement de notre système d'encodage
Notre système d'encodage comporte deux couches :
Couche 1 : Capteur de point zéro à photo-interrupteur. Il s'agit d'un composant simple mais essentiel. Une petite porte optique se trouve à une position physique fixe sur les axes de panoramique et d'inclinaison. Chaque fois que la caméra est mise sous tension, elle tourne jusqu'à ce qu'elle atteigne cette porte. C'est la référence du zéro absolu. Toutes les positions prédéfinies sont calculées à partir de ce point. Cela signifie que même si le compteur électronique a été corrompu lors d'une panne de courant, la caméra retrouvera son vrai zéro au prochain démarrage. L'erreur accumulée a disparu.
Couche 2 : disque optique haute résolution (optionnel pour les projets haut de gamme). Pour les installations critiques - surveillance des frontières, périmètres d'aéroports, surveillance des autoroutes - nous proposons en option un système de surveillance à haute résolution. codeur optique 2 disque. Ce disque comporte des milliers de lignes gravées avec précision. Un capteur lit ces lignes en temps réel lorsque la caméra se déplace. Il en résulte un retour d'information continu et absolu sur la position.
Que se passe-t-il lorsque le vent pousse la caméra ?
Il s'agit d'un scénario réel que la plupart des fiches techniques ignorent. Une forte rafale de vent frappe le boîtier de l'appareil photo. La tête se déplace de 0,2° par rapport à son réglage. Sans encodeur, la caméra ne sait pas qu'elle a bougé. Elle reste là, à pointer au mauvais endroit.
Grâce à notre encodeur optique, le système détecte instantanément le déplacement. En 300 millisecondes, le moteur s'active et repousse la tête dans la bonne position. L'opérateur ne le voit même pas se produire.
| Type de système | Détecte les perturbations externes ? | Autocorrection ? | Dérive à long terme |
|---|---|---|---|
| Boucle ouverte (pas de codeur) | Non | Non | Accumulation au fil du temps |
| Point zéro uniquement | Non (uniquement au redémarrage) | Uniquement au redémarrage | Réinitialisation à chaque cycle d'alimentation |
| Encodeur optique complet | Oui, en temps réel | Oui, dans un délai de 300 ms | Effectivement zéro |
Puis-je effectuer un étalonnage à distance si la précision préréglée commence à se dégrader ?
Vous disposez de 200 caméras réparties sur trois États. L'une d'entre elles commence à présenter une dérive prédéfinie. Vous ne pouvez pas envoyer un technicien sur chaque site pour recalibrer une caméra.
Oui. Vous pouvez déclencher un réétalonnage du point zéro à distance via l'interface Web ou votre VMS. La caméra exécutera automatiquement sa routine de repérage, trouvera le capteur physique du point zéro et réinitialisera toutes les références prédéfinies. Aucune visite sur site n'est nécessaire.
 Interface d'étalonnage à distance des caméras PTZ
Interface d'étalonnage à distance des caméras PTZ
Quand faut-il recalibrer ?
Dans la plupart des cas, vous ne devriez jamais avoir besoin de recalibrer manuellement. L'appareil photo le fait automatiquement à chaque mise sous tension. Mais il existe quelques situations dans lesquelles un réétalonnage manuel à distance s'avère utile :
- Après une mise à jour du micrologiciel qui modifie les paramètres de contrôle du moteur.
- Après que l'appareil a fonctionné en continu pendant plusieurs mois sans redémarrage.
- Après un événement physique connu - comme une tempête violente, un tremblement de terre, ou quelqu'un qui heurte la caméra pendant la maintenance.
- Lorsque vous remarquez sur votre VMS qu'une présélection est légèrement décalée par rapport à ce qu'elle devrait être.
Fonctionnement du processus d'étalonnage à distance
La procédure est simple. Vous vous connectez à l'interface Web de la caméra. Vous accédez à la page des paramètres PTZ. Cliquez sur “Home Reset” ou “Zero-Point Calibration”. La caméra effectue un panoramique et une inclinaison jusqu'à ce qu'elle trouve la barrière photo-interruptrice sur chaque axe. Cela prend environ 10 secondes. Ensuite, les 256 préréglages sont recalculés à partir de la nouvelle référence zéro.
Vous pouvez également programmer cette opération automatiquement. Par exemple, vous pouvez programmer la caméra pour qu'elle se recalibre à 3 heures du matin tous les dimanches. Pendant cette fenêtre de 10 secondes, la caméra se déplace brièvement pour trouver son point zéro, puis revient à sa patrouille ou à son préréglage. Pour la plupart des projets, cela suffit amplement à maintenir la dérive à zéro.
Une méthode de vérification pratique que vous pouvez utiliser
Après le recalibrage, comment savoir s'il a réellement fonctionné ? Voici une méthode que je recommande à tous nos partenaires intégrateurs.
Choisissez un préréglage qui pointe vers un élément fixe et contrasté - un coin de bâtiment, un poteau, une ligne peinte. Faites une capture d'écran. Il s'agit de votre image de référence. Notez les coordonnées en pixels de cet élément.
Après le recalibrage, appelez le même préréglage. Effectuez une nouvelle capture d'écran. Comparez les coordonnées des pixels. Si l'élément s'est déplacé de moins de 3 pixels (pour un HFOV typique de 60° sur un capteur 1080p), vous êtes à 0,1° près.
Vous pouvez le faire depuis votre bureau. Pas d'échelle. Pas de roulage de camion. Pas d'après-midi perdue.
Référence pour la conversion des pixels en angles
| FOV horizontal | Résolution | Degrés par pixel | Pixels autorisés pour 0,1° |
|---|---|---|---|
| 60° | 1920 px | 0.031° | ~3,2 px |
| 30° | 1920 px | 0.016° | ~6,4 px |
| 3° (zoom 40X) | 1920 px | 0.0016° | ~64 px |
Remarquez un élément intéressant dans ce tableau. À un zoom de 40X, le champ de vision est très étroit - environ 3°. Cela signifie que chaque pixel couvre un angle beaucoup plus petit. Ainsi, une dérive de 0,1° se traduirait par un décalage de 64 pixels à l'écran. C'est énorme. Vous le verriez immédiatement. C'est la raison pour laquelle la précision mécanique est la plus importante à des niveaux de zoom élevés.
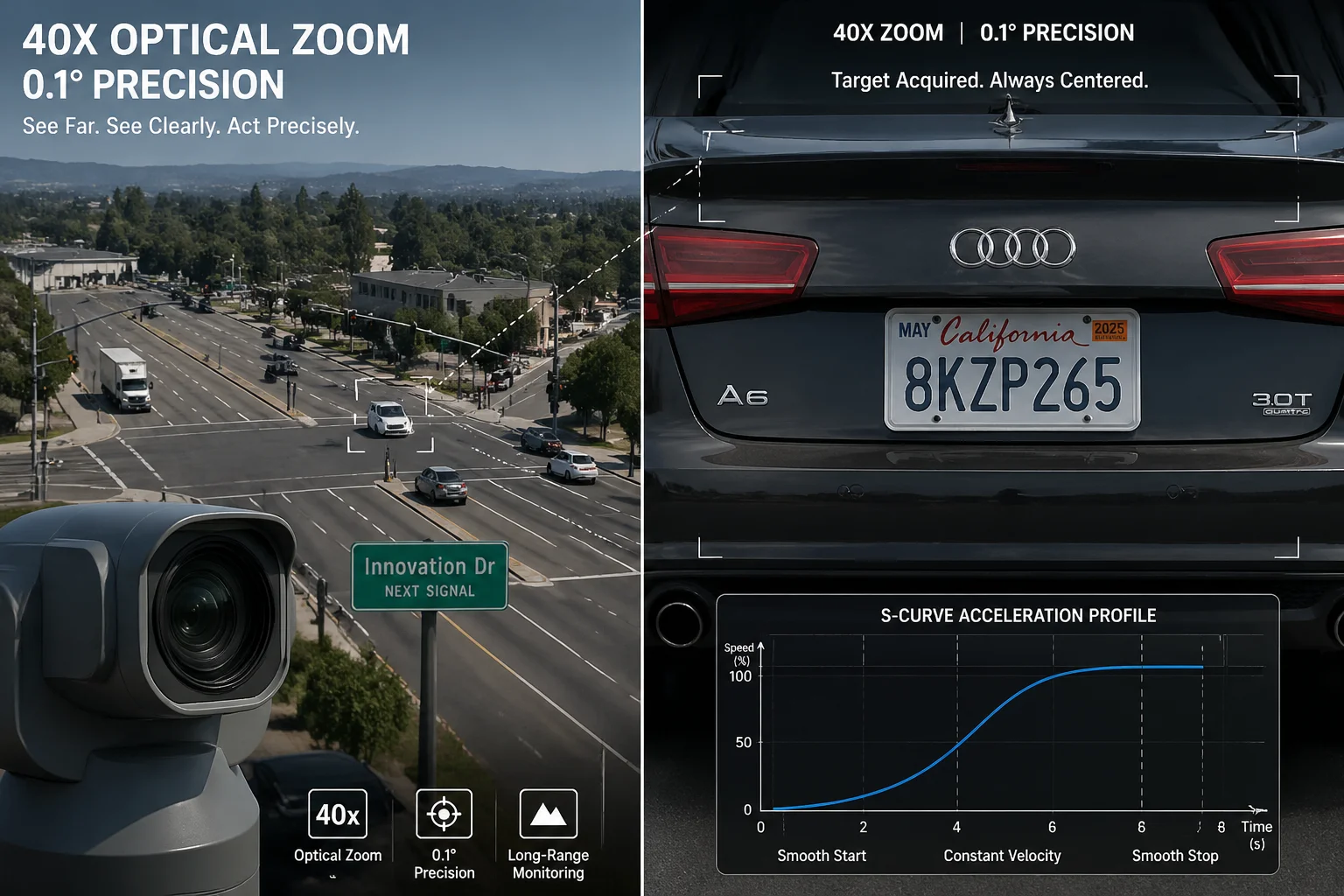
La précision de 0,1 degré est-elle maintenue même avec le zoom optique maximal de 40X ?
C'est la question qui sépare les affirmations marketing de la réalité technique. N'importe quel appareil photo peut atteindre 0,1° au grand angle. Le véritable test est celui du zoom 40X, où chaque petite erreur est amplifiée.
Oui. La précision mécanique de 0,1° est une propriété du mécanisme d'inclinaison panoramique, et non de l'objectif. Elle reste la même quel que soit le niveau de zoom. Mais à partir d'un zoom de 40X, l'impact visuel d'une erreur de 0,05° devient très évident - c'est exactement la raison pour laquelle notre précision mécanique doit être aussi stricte.
 Caméra PTZ zoom optique 40X précision prédéfinie
Caméra PTZ zoom optique 40X précision prédéfinie
Pourquoi le zoom amplifie le problème
Permettez-moi d'expliquer cela à l'aide d'un exemple simple. Au grand angle (60° FOV), votre caméra voit une zone de 100 mètres de large à 500 mètres de distance. Une erreur de 0,1° déplace le centre de l'image d'environ 0,87 mètre. Vous ne le remarquerez probablement pas.
Avec un zoom de 40X, le champ de vision se réduit à environ 1,5°. Votre appareil photo ne voit plus qu'une zone de 13 mètres de large à la même distance. Cette même erreur de 0,1° déplace toujours le centre de 0,87 mètre. Mais à présent, 0,87 mètre représente une part importante de l'ensemble de votre champ de vision. Le visage d'une personne qui était centré se trouve maintenant au bord du cadre - ou a complètement disparu.
C'est pourquoi nous disons que la précision du préréglage n'est pas une spécification de zoom. Il s'agit d'une spécification mécanique. Le moteur, la courroie, l'encodeur ne connaissent pas le niveau de zoom de l'objectif et ne s'en préoccupent pas. Ils doivent simplement placer la tête dans le bon angle. À chaque fois.
L'ingénierie au service d'une précision constante
Trois éléments rendent cela possible dans notre usine :
Commande de moteur à 256 micro-pas. En divisant chaque pas de moteur de 1,8° en 256 micro-pas, nous obtenons un angle minimum contrôlable d'environ 0,007°. Cela nous donne plus de 14 fois la résolution dont nous avons besoin pour une précision de 0,1°. Cette marge est intentionnelle. Elle signifie que nous pouvons toujours atteindre 0,1° même si quelques micro-pas sont perdus en raison de la friction ou de la charge.
Accélération et décélération de la courbe en S. Lorsque l'appareil photo se déplace vers un préréglage, il ne s'arrête pas d'un coup. Il suit un profil de vitesse en forme de S - démarrage lent, accélération douce, décélération progressive, arrêt en douceur. Cela permet d'éliminer les chocs mécaniques à l'origine des dépassements. Sans le contrôle de la courbe en S, une tête PTZ se déplaçant rapidement peut dépasser sa cible de 0,2° à 0,5° avant de se stabiliser. Avec la courbe en S, le dépassement est effectivement nul.
Compensation dynamique de l'usure. Notre microprogramme suit le nombre de cycles effectués par chaque axe. Au fur et à mesure que le nombre de cycles augmente, l'algorithme applique un petit facteur de correction pour tenir compte de l'usure de la courroie et des variations de frottement des roulements. Il ne s'agit pas d'un décalage fixe, mais d'une valeur apprise qui se met à jour tout au long de la durée de vie de la caméra. Il en résulte qu'une caméra ayant effectué 50 000 cycles atteint les préréglages avec autant de précision qu'une caméra neuve.
Comment le tester soi-même avec un zoom de 40X
Si vous évaluez nos caméras - ou toute autre caméra PTZ - voici ce que je vous suggère :
- Réglez l'appareil photo sur le zoom 40X.
- Dirigez-le vers un objet éloigné aux arêtes vives (un panneau, un cadre de fenêtre, un poteau).
- Enregistrez-la en tant que préréglage 1.
- Déplacer l'appareil dans une position complètement différente (préréglage 2).
- Appeler à nouveau la présélection 1.
- Comparez l'image à votre référence.
- Répéter 50 fois.
Si l'élément cible reste à moins de 3 pixels sur une image 1080p avec un HFOV de 60° - ou à l'intérieur du nombre de pixels équivalent pour votre FOV réel - la caméra passe. Si elle dérive, vous avez un problème. Et vous le saurez avant d'installer une seule caméra sur un poteau.
Conclusion
La précision prédéfinie inférieure à 0,1° est le fruit d'un matériel robuste, d'algorithmes intelligents et d'un auto-calibrage physique - et non d'un simple chiffre sur une feuille de spécifications. Testez-le. Vérifiez-le. Puis faites-lui confiance.
1. Contrôle en boucle ouverte du moteur pas à pas et risques inhérents de perte de pas. ︎ 2. Codeur rotatif optique pour le retour d'information sur la position absolue. ︎ 3. Propriétés de dilatation thermique des courroies renforcées de Kevlar. ︎ 4. Conception du circuit d'étalonnage du point zéro du photo-interrupteur. ︎ 5. Comparaison du couple et de la précision entre 256 micro-pas et un pas complet. ︎ 6. Profilage des mouvements en courbe S pour la réduction des chocs mécaniques. ︎ 7. Algorithme de compensation dynamique de l'usure pour une précision à long terme. ︎ 8. Conversion des pixels en angles pour les tests de vérification prédéfinis. ︎ 9. Méthodes de contrôle du moteur PTZ en boucle fermée ou en boucle ouverte. ︎ 10. Service ONVIF PTZ pour les commandes d'étalonnage à distance. ︎