
Ho visto telecamere PTZ allontanarsi dall'obiettivo dopo poche centinaia di cicli preimpostati. Questo piccolo spostamento può costare un intero progetto.
Manteniamo la deviazione della preimpostazione al di sotto di ±0,1° combinando 256 motori a micropassi, trasmissione a cinghia rinforzata in Kevlar, algoritmi di movimento con curva a S e calibrazione del punto zero con fotointerruttore. Questi quattro livelli lavorano insieme per far sì che ogni preselezione ritorni esattamente allo stesso punto, anche dopo migliaia di cicli.
 Test di precisione del posizionamento preimpostato della telecamera PTZ
Test di precisione del posizionamento preimpostato della telecamera PTZ
In questo articolo vi illustrerò tutti i componenti di questo sistema. Vi mostrerò anche un metodo di prova pratico che potrete utilizzare per verificare personalmente la precisione di 0,1°, prima di firmare qualsiasi spedizione. Entriamo nel vivo.
La mia fotocamera perderà la posizione di partenza dopo 10.000 cicli di brandeggio e inclinazione?
Questa è la domanda che tiene sveglio ogni integratore. Si installano 50 telecamere su un'autostrada e sei mesi dopo la metà di esse punta sulla corsia sbagliata.
No. Le nostre telecamere PTZ non perdono la posizione iniziale dopo 10.000 cicli. Ogni unità supera uno stress test di 3.000 cicli prima di essere spedita. Il fotointerruttore fisico azzera il punto zero a ogni accensione, quindi la deriva elettronica non si accumula in un offset permanente.
 Test della posizione iniziale della telecamera PTZ
Test della posizione iniziale della telecamera PTZ
Perché le preimpostazioni vanno alla deriva?
La maggior parte delle derive di preimpostazione deriva da tre fonti: perdita di passo del motore, allungamento della cinghia ed errori del contatore elettronico. Vediamo di analizzare ciascuna di esse.
Perdita di passo del motore avviene quando un motore passo-passo 1 si muove troppo velocemente e salta un passo. Ogni passo saltato aggiunge un piccolo errore angolare. In centinaia di cicli, questi errori si accumulano. La telecamera pensa di essere a 90°, ma in realtà è a 90,3°. Con uno zoom 40X, questi 0,3° significano che l'obiettivo è completamente fuori dallo schermo.
Tratto di cintura è un problema meccanico. Le cinghie di gomma economiche si dilatano quando si surriscaldano. In un deserto o in un'installazione sul tetto, la temperatura dell'alloggiamento può raggiungere i 60°C o più. La cinghia si allunga, il rapporto di trasmissione cambia leggermente e la preimpostazione si sposta.
Errori del contatore elettronico sono i più subdoli. Il controllore conta gli impulsi del motore per tracciare la posizione. Ma i disturbi elettrici, gli errori di alimentazione o i bug del firmware possono alterare il contatore. La telecamera non ha modo di sapere che è sbagliato, a meno che non abbia un punto di riferimento fisico con cui confrontarsi.
Come risolviamo ogni problema
| Fonte della deriva | La nostra soluzione | Risultato |
|---|---|---|
| Perdita di passo del motore | 256 micropassi con controllo di corrente | Angolo minimo del passo < 0,05°, praticamente nessun salto |
| Tratto di cintura | Cinghia di distribuzione rinforzata in Kevlar | Espansione termica prossima allo zero, anche a 60°C |
| Errore del contatore elettronico | Reset del punto zero del fotointerruttore ad ogni avvio | Gli errori accumulati vengono cancellati automaticamente |
Il test di fabbrica a 3.000 cicli
Prima che ogni unità lasci la nostra fabbrica, montiamo un puntatore laser sulla testa del PTZ. Lo programmiamo per scorrere ininterrottamente 256 preset per 24 ore, vale a dire oltre 3.000 cicli completi. All'estremità della sala prove si trova una scheda di puntamento fissa. Misuriamo la posizione del punto laser dopo ogni ciclo. Se il punto si sposta di più dell'equivalente di 0,1° su una singola preimpostazione, l'unità non funziona. Non viene spedita.
Questo non è un test campione. Lo eseguiamo su ogni singola telecamera. David, se vuoi, possiamo inviarti il rapporto di prova con le foto del bersaglio laser per il tuo lotto specifico.
In che modo l'encoder ad alta precisione impedisce la “deriva” della preimpostazione nel tempo?
Ho parlato con integratori che hanno sostituito interi parchi di telecamere dopo due anni perché le preimpostazioni si erano allontanate a tal punto da rendere le telecamere inutilizzabili. Si tratta di un enorme spreco di denaro.
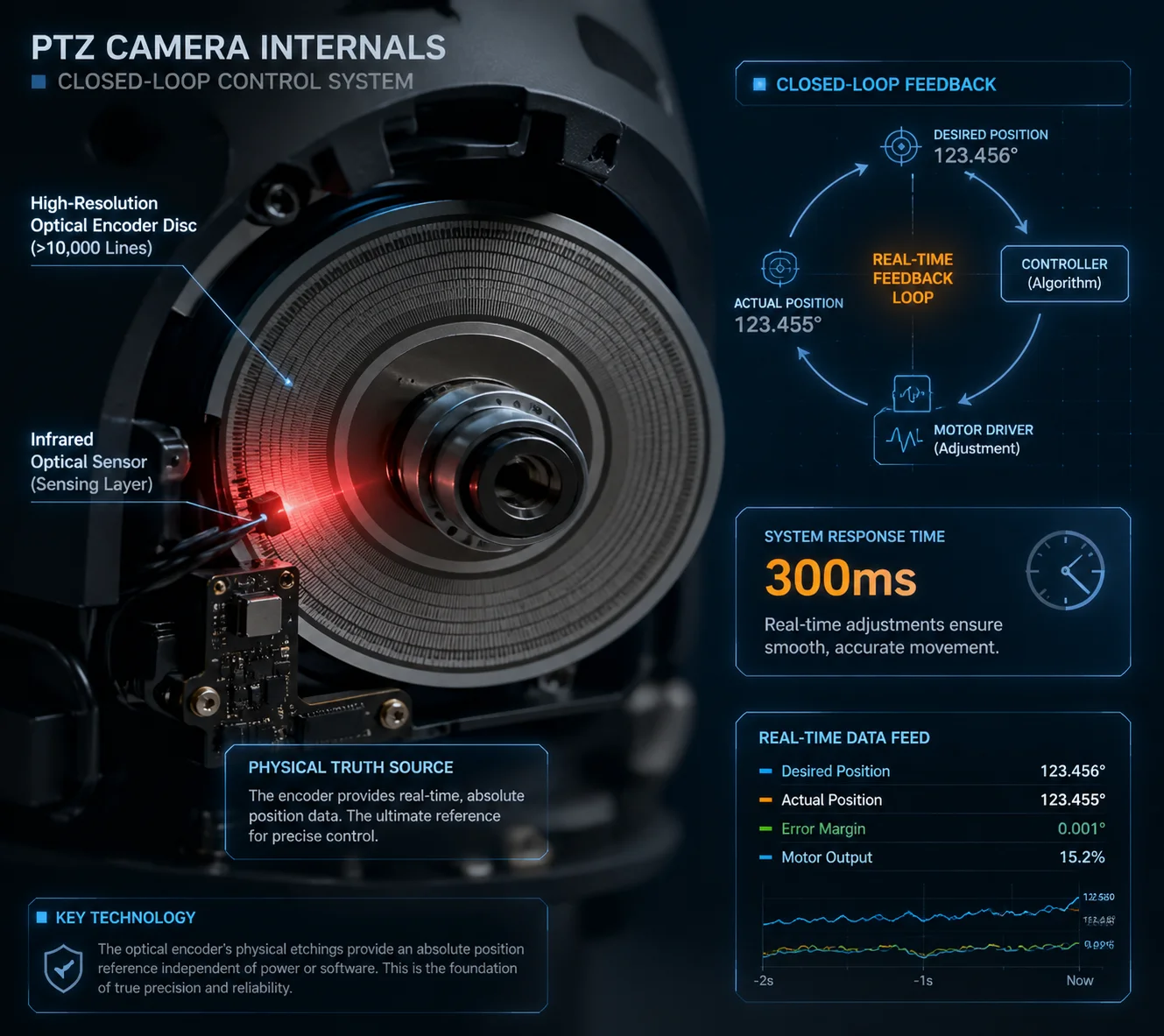
Il nostro encoder ottico ad alta precisione funge da fonte di verità fisica. Monitora continuamente la posizione angolare effettiva degli assi di panoramica e inclinazione. Se la posizione reale si discosta da quella comandata, anche di una frazione di grado, il sistema la corregge entro 300 millisecondi.
 Encoder ottico ad alta precisione per telecamera PTZ
Encoder ottico ad alta precisione per telecamera PTZ
Anello aperto e anello chiuso: Perché è importante
La maggior parte delle telecamere PTZ economiche utilizza un sistema ad anello aperto. Il controller invia un comando: “Muoviti di 500 passi a destra”. Il motore si sposta di 500 passi. Il controller presume che la telecamera sia ora nell'angolazione corretta. Ma non controlla mai.
È come guidare con gli occhi chiusi. Si gira il volante di 30 gradi e si spera di essere nella corsia giusta. Per un po' funziona. Poi non funziona più.
Un sistema ad anello chiuso aggiunge un sensore che legge costantemente la posizione effettiva. Se il motore supera la posizione di 2 passi, il sensore lo vede e il controllore invia una correzione. Questa è la differenza tra sperare e sapere.
Come funziona il nostro sistema di codifica
Il nostro sistema di codifica ha due livelli:
Strato 1: sensore di punto zero con fotointerruttore. Si tratta di un componente semplice ma critico. Un piccolo gate ottico si trova in una posizione fisica fissa su entrambi gli assi di panoramica e inclinazione. Ogni volta che la telecamera si accende, ruota finché non tocca questo gate. Questo è il riferimento dello zero assoluto. Tutte le posizioni preimpostate vengono calcolate a partire da questo punto. Ciò significa che anche se il contatore elettronico è stato danneggiato durante un'interruzione di corrente, la telecamera troverà il suo vero zero all'avvio successivo. L'errore accumulato è scomparso.
Layer 2: disco ottico ad alta risoluzione (opzionale per progetti di fascia alta). Per le installazioni critiche - sorveglianza dei confini, perimetri aeroportuali, monitoraggio delle autostrade - offriamo un sistema opzionale ad alta risoluzione. encoder ottico 2 disco. Questo disco presenta migliaia di linee incise con precisione. Un sensore legge queste linee in tempo reale mentre la telecamera si muove. Il risultato è un feedback di posizione continuo e assoluto.
Cosa succede quando il vento spinge la telecamera?
Si tratta di uno scenario reale che la maggior parte delle schede tecniche ignora. Una forte raffica di vento colpisce l'alloggiamento della fotocamera. La testa si sposta di 0,2° rispetto alla sua impostazione predefinita. Senza un encoder, la telecamera non sa di essersi spostata. Rimane lì, puntata nel punto sbagliato.
Grazie al nostro encoder ottico, il sistema rileva istantaneamente lo spostamento. Entro 300 millisecondi, il motore si attiva e spinge la testa nella posizione corretta. L'operatore non se ne accorge nemmeno.
| Tipo di sistema | Rileva un disturbo esterno? | Si autocorregge? | Deriva a lungo termine |
|---|---|---|---|
| Ad anello aperto (senza encoder) | No | No | Si accumula nel tempo |
| Solo punto zero | No (solo al riavvio) | Solo al riavvio | Si resetta ad ogni ciclo di alimentazione |
| Encoder ottico completo | Sì, in tempo reale | Sì, entro 300 ms | Effettivamente zero |
Posso eseguire una calibrazione remota se la precisione preimpostata inizia a degradarsi?
Avete 200 telecamere distribuite in tre stati. Una di esse inizia a mostrare una deriva preimpostata. Non è possibile inviare un tecnico in ogni sito solo per ricalibrare una telecamera.
Sì. È possibile attivare una ricalibrazione del punto zero a distanza attraverso l'interfaccia web o il VMS. La telecamera eseguirà automaticamente la sua routine di homing, troverà il sensore fisico del punto zero e ripristinerà tutti i riferimenti preimpostati. Non è necessaria una visita in loco.
 Interfaccia di calibrazione della telecamera PTZ remota
Interfaccia di calibrazione della telecamera PTZ remota
Quando è necessario ricalibrare?
Nella maggior parte dei casi, non dovrebbe essere necessario ricalibrare manualmente. La fotocamera lo fa automaticamente ad ogni accensione. Ma ci sono alcune situazioni in cui una ricalibrazione manuale a distanza ha senso:
- Dopo un aggiornamento del firmware che modifica i parametri di controllo del motore.
- Dopo che la fotocamera è rimasta in funzione per diversi mesi senza essere riavviata.
- Dopo un evento fisico noto, come una forte tempesta, un terremoto o un urto della telecamera durante la manutenzione.
- Quando si nota sul VMS che una preimpostazione è leggermente fuori posto.
Come funziona il processo di calibrazione a distanza
Il processo è semplice. Si accede all'interfaccia web della telecamera. Si accede alla pagina delle impostazioni PTZ. Si fa clic su “Home Reset” o “Calibrazione del punto zero”. La telecamera esegue una panoramica e un'inclinazione finché non trova il gate del fotointerruttore su ciascun asse. Questa operazione richiede circa 10 secondi. Dopodiché, tutte le 256 preimpostazioni vengono ricalcolate dal nuovo riferimento zero.
È anche possibile programmare questa operazione automaticamente. Ad esempio, è possibile impostare la ricalibrazione della telecamera alle 3:00 del mattino di ogni domenica. Durante questa finestra di 10 secondi, la telecamera si sposta brevemente per trovare il punto zero, quindi torna alla sua ronda o alla sua preimpostazione. Per la maggior parte dei progetti, questo è più che sufficiente per mantenere la deriva a zero.
Un metodo di verifica pratico e utilizzabile
Dopo la ricalibrazione, come si fa a sapere che ha funzionato? Ecco un metodo che consiglio a tutti i nostri partner integratori.
Scegliete una preimpostazione che punti a un elemento fisso e ad alto contrasto: un angolo di un edificio, un palo, una linea dipinta. Scattare un'istantanea. Questa è l'immagine di riferimento. Prendere nota delle coordinate in pixel dell'elemento.
Dopo la ricalibrazione, richiamare la stessa preimpostazione. Eseguire un altro screenshot. Confrontare le coordinate dei pixel. Se l'elemento si è spostato di meno di 3 pixel (con un HFOV tipico di 60° su un sensore a 1080p), si è entro lo 0,1°.
Potete farlo dalla vostra scrivania. Niente scala. Nessun rullo di camion. Nessun pomeriggio sprecato.
Riferimento alla conversione pixel-angolo
| FOV orizzontale | Risoluzione | Gradi per pixel | Pixel consentiti per 0,1° |
|---|---|---|---|
| 60° | 1920 px | 0.031° | ~3,2 px |
| 30° | 1920 px | 0.016° | ~6,4 px |
| 3° (zoom 40X) | 1920 px | 0.0016° | ~64 px |
Si noti una cosa interessante in questa tabella. Con uno zoom 40X, il FOV è molto stretto, circa 3°. Ciò significa che ogni pixel copre un angolo molto più piccolo. Quindi, 0,1° di deriva si tradurrebbe in uno spostamento di 64 pixel sullo schermo. È una cosa enorme. Lo si vedrebbe immediatamente. Ecco perché la precisione meccanica è fondamentale a livelli di zoom elevati.
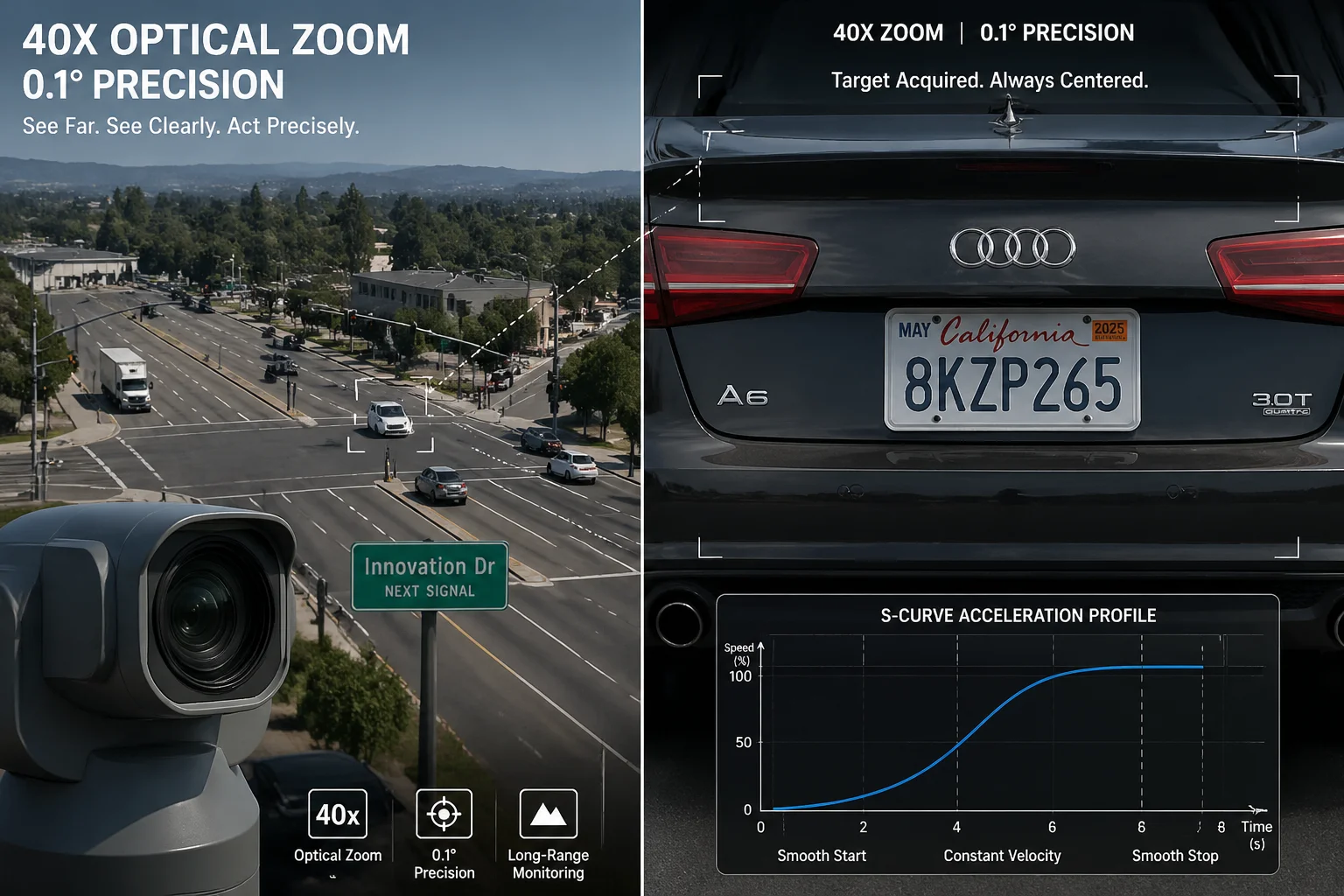
La precisione di 0,1 gradi è mantenuta anche con lo zoom ottico massimo di 40X?
Questa è la domanda che separa le affermazioni del marketing dalla realtà ingegneristica. Qualsiasi fotocamera può raggiungere lo 0,1° con il grandangolo. Il vero banco di prova è lo zoom 40X, dove ogni minimo errore è amplificato.
Sì. La precisione meccanica di 0,1° è una proprietà del meccanismo di inclinazione, non dell'obiettivo. Rimane invariata indipendentemente dal livello di zoom. Ma con uno zoom di 40X, l'impatto visivo di un errore di 0,05° diventa molto evidente, ed è proprio per questo che la nostra precisione meccanica deve essere così rigorosa.
 Telecamera PTZ zoom ottico 40X precisione preimpostata
Telecamera PTZ zoom ottico 40X precisione preimpostata
Perché lo zoom ingrandisce il problema
Mi spiego con un semplice esempio. Con un grandangolo (FOV di 60°), la fotocamera vede un'area larga 100 metri a 500 metri di distanza. Un errore di 0,1° sposta il centro dell'immagine di circa 0,87 metri. Probabilmente non ve ne accorgereste nemmeno.
Con uno zoom 40X, il FOV si riduce a circa 1,5°. Ora la fotocamera vede solo un'area di 13 metri di larghezza alla stessa distanza. Lo stesso errore di 0,1° sposta ancora il centro di 0,87 metri. Ma ora 0,87 metri sono una porzione significativa dell'intero campo visivo. Il volto di una persona che era centrata si trova ora ai margini dell'inquadratura, o scompare del tutto.
Ecco perché diciamo: la precisione preimpostata non è una specifica dello zoom. È una specifica meccanica. Il motore, la cinghia, l'encoder non sanno o non si preoccupano del livello di zoom dell'obiettivo. Devono solo posizionare la testa all'angolo giusto. Ogni volta.
L'ingegneria alla base della precisione costante
Tre cose rendono possibile tutto questo nel nostro stabilimento:
Controllo motore a 256 micropassi. Dividendo ogni passo del motore di 1,8° in 256 micropassi, si ottiene un angolo minimo controllabile di circa 0,007°. In questo modo otteniamo una risoluzione di oltre 14 volte superiore a quella necessaria per ottenere una precisione di 0,1°. Questo margine è intenzionale. Significa che possiamo raggiungere 0,1° anche se qualche micropasso va perso a causa dell'attrito o del carico.
Accelerazione e decelerazione della curva a S. Quando la fotocamera si sposta su una preimpostazione, non si ferma di colpo. Segue un profilo di velocità a forma di S: avvio lento, accelerazione dolce, decelerazione graduale, arresto morbido. In questo modo si elimina l'urto meccanico che causa l'overshoot. Senza il controllo della curva a S, una testa PTZ in rapido movimento può superare l'obiettivo di 0,2°-0,5° prima di stabilizzarsi. Con questo controllo, l'overshoot è di fatto nullo.
Compensazione dinamica dell'usura. Il nostro firmware tiene traccia del numero di cicli completati da ciascun asse. All'aumentare del numero di cicli, l'algoritmo applica un piccolo fattore di correzione per tenere conto dell'usura della cinghia e delle variazioni di attrito dei cuscinetti. Non si tratta di un offset fisso, ma di un valore appreso che si aggiorna nel corso della vita della telecamera. Il risultato è che una telecamera con 50.000 cicli di funzionamento raggiunge le preimpostazioni con la stessa precisione di un'unità nuova di zecca.
Come testare questo aspetto con uno zoom a 40X
Se state valutando le nostre telecamere, o qualsiasi altra telecamera PTZ, ecco cosa vi suggerisco:
- Impostare la fotocamera su uno zoom 40X.
- Puntatelo su un oggetto distante con spigoli vivi (un cartello, il telaio di una finestra, un palo).
- Salvarlo come preimpostazione 1.
- Spostare la telecamera in una posizione completamente diversa (preimpostazione 2).
- Richiamare la preimpostazione 1.
- Confrontate l'immagine con il vostro riferimento.
- Ripetere 50 volte.
Se l'elemento target rimane entro 3 pixel su un'immagine a 1080p con HFOV di 60°, o entro il numero di pixel equivalente per il FOV effettivo, la telecamera passa. Se si allontana, c'è un problema. E lo saprete prima di installare una singola telecamera su un palo.
Conclusione
L'accuratezza preimpostata sotto lo 0,1° è frutto di un hardware rigoroso, di algoritmi intelligenti e di un'autocalibrazione fisica, non di un semplice numero su una scheda tecnica. Testatelo. Verificatelo. Poi fidatevi.
1. Controllo ad anello aperto del motore passo-passo e rischi intrinseci di perdita di passo. ︎ 2. Encoder ottico rotativo per il feedback di posizione assoluto. ︎ 3. Proprietà di espansione termica della cintura rinforzata con Kevlar. ︎ 4. Progettazione del circuito di calibrazione del punto zero del fotointerruttore. ︎ 5. Confronto tra la coppia e la precisione di 256 micropassi e quella di un passo intero. ︎ 6. Profilazione del movimento con curva a S per la riduzione degli urti meccanici. ︎ 7. Algoritmo di compensazione dinamica dell'usura per una precisione a lungo termine. ︎ 8. Conversione pixel-angolo per i test di verifica preimpostati. ︎ 9. Metodi di controllo dei motori PTZ ad anello chiuso e ad anello aperto. ︎ 10. Servizio ONVIF PTZ per i comandi di calibrazione remota. ︎