
Ich habe erlebt, dass PTZ-Kameras schon nach ein paar hundert voreingestellten Zyklen vom Ziel abdriften. Diese kleine Abweichung kann Sie ein ganzes Projekt kosten.
Durch die Kombination von 256 Mikroschritt-Motortreibern, Kevlar-verstärktem Riemenantrieb, S-Kurven-Bewegungsalgorithmen und Fotounterbrecher-Nullpunktkalibrierung halten wir die Abweichung von Voreinstellungen unter ±0,1°. Diese vier Ebenen arbeiten zusammen, so dass jede Voreinstellung auch nach Tausenden von Zyklen exakt an die gleiche Stelle zurückkehrt.
 Test der Positionierungsgenauigkeit von PTZ-Kamera-Voreinstellungen
Test der Positionierungsgenauigkeit von PTZ-Kamera-Voreinstellungen
In diesem Artikel werde ich Ihnen die einzelnen Bestandteile dieses Systems vorstellen. Außerdem zeige ich Ihnen ein praktisches Testverfahren, mit dem Sie die 0,1°-Genauigkeit selbst überprüfen können - bevor Sie eine Lieferung absegnen. Legen wir los.
Verliert meine Kamera nach 10.000 Schwenk- und Neigevorgängen ihre “Ausgangsposition”?
Das ist die Frage, die jeden Integrator nachts wach hält. Sie installieren 50 Kameras auf einer Autobahn, und sechs Monate später zeigt die Hälfte von ihnen auf die falsche Fahrbahn.
Nein. Unsere PTZ-Kameras verlieren ihre Ausgangsposition nicht nach 10.000 Zyklen. Jedes Gerät durchläuft vor der Auslieferung einen Belastungstest mit 3.000 Zyklen. Der physische Fotounterbrecher setzt den Nullpunkt bei jedem Einschalten zurück, so dass sich die elektronische Abweichung nicht zu einer dauerhaften Verschiebung summiert.
 Zyklischer Test der Grundstellung der PTZ-Kamera
Zyklischer Test der Grundstellung der PTZ-Kamera
Warum treiben die Voreinstellungen überhaupt ab?
Die meisten Voreinstellungsabweichungen haben drei Ursachen: Motorschrittverlust, Banddehnung und elektronische Zählerfehler. Lassen Sie mich jede einzelne Ursache aufschlüsseln.
Motorschrittverlust geschieht, wenn ein Schrittmotor 1 bewegt sich zu schnell und überspringt einen Schritt. Jeder übersprungene Schritt fügt einen winzigen Winkelfehler hinzu. Über Hunderte von Zyklen hinweg summieren sich diese Fehler. Die Kamera denkt, sie sei bei 90°, aber sie ist tatsächlich bei 90,3°. Bei einem 40-fachen Zoom bedeuten diese 0,3°, dass das Ziel völlig außerhalb des Bildschirms liegt.
Gürtel dehnen ist ein mechanisches Problem. Billige Gummiriemen dehnen sich aus, wenn sie heiß werden. In der Wüste oder bei einer Dachinstallation kann die Gehäusetemperatur 60°C oder mehr erreichen. Der Riemen wird länger, das Übersetzungsverhältnis ändert sich leicht, und die Voreinstellung verschiebt sich.
Elektronische Zählerfehler sind die raffiniertesten. Der Controller zählt die Motorimpulse, um die Position zu verfolgen. Aber elektrisches Rauschen, Stromausfälle oder Firmware-Fehler können diesen Zähler verfälschen. Die Kamera hat keine Möglichkeit zu erkennen, dass sie falsch liegt - es sei denn, sie hat einen physischen Referenzpunkt, den sie überprüfen kann.
Wie wir die einzelnen Probleme lösen
| Drift Quelle | Unsere Lösung | Ergebnis |
|---|---|---|
| Motorschrittverlust | 256 Mikroschritt-Treiber mit Stromregelung | Minimaler Schrittwinkel < 0,05°, praktisch kein Überspringen |
| Gürtel dehnen | Kevlar-verstärkter Zahnriemen | Nahezu keine thermische Ausdehnung, selbst bei 60°C |
| Fehler im elektronischen Zähler | Nullpunkt-Reset des Photounterbrechers bei jedem Start | Kumulierte Fehler werden automatisch gelöscht |
Der 3.000-Zyklen-Werkstest
Bevor ein Gerät unser Werk verlässt, montieren wir einen Laserpointer auf den PTZ-Kopf. Wir programmieren ihn so, dass er 24 Stunden lang kontinuierlich 256 Voreinstellungen durchläuft - das sind mehr als 3.000 vollständige Zyklen. Eine feste Zieltafel befindet sich am anderen Ende des Testraums. Nach jedem Zyklus messen wir die Position des Laserpunkts. Wenn der Punkt bei einer einzelnen Voreinstellung um mehr als 0,1° abweicht, ist das Gerät defekt. Es wird nicht ausgeliefert.
Dies ist kein Beispieltest. Wir führen ihn bei jeder einzelnen Kamera durch. David, wenn Sie möchten, können wir Ihnen den Testbericht mit Fotos des Laserziels für Ihre spezielle Charge zusenden.
Wie verhindert der hochpräzise Encoder, dass die Voreinstellung mit der Zeit “driftet”?
Ich habe mit Integratoren gesprochen, die ganze Kameraflotten nach zwei Jahren ausgetauscht haben, weil die Voreinstellungen so weit abgewichen waren, dass die Kameras unbrauchbar wurden. Das ist eine massive Geldverschwendung.
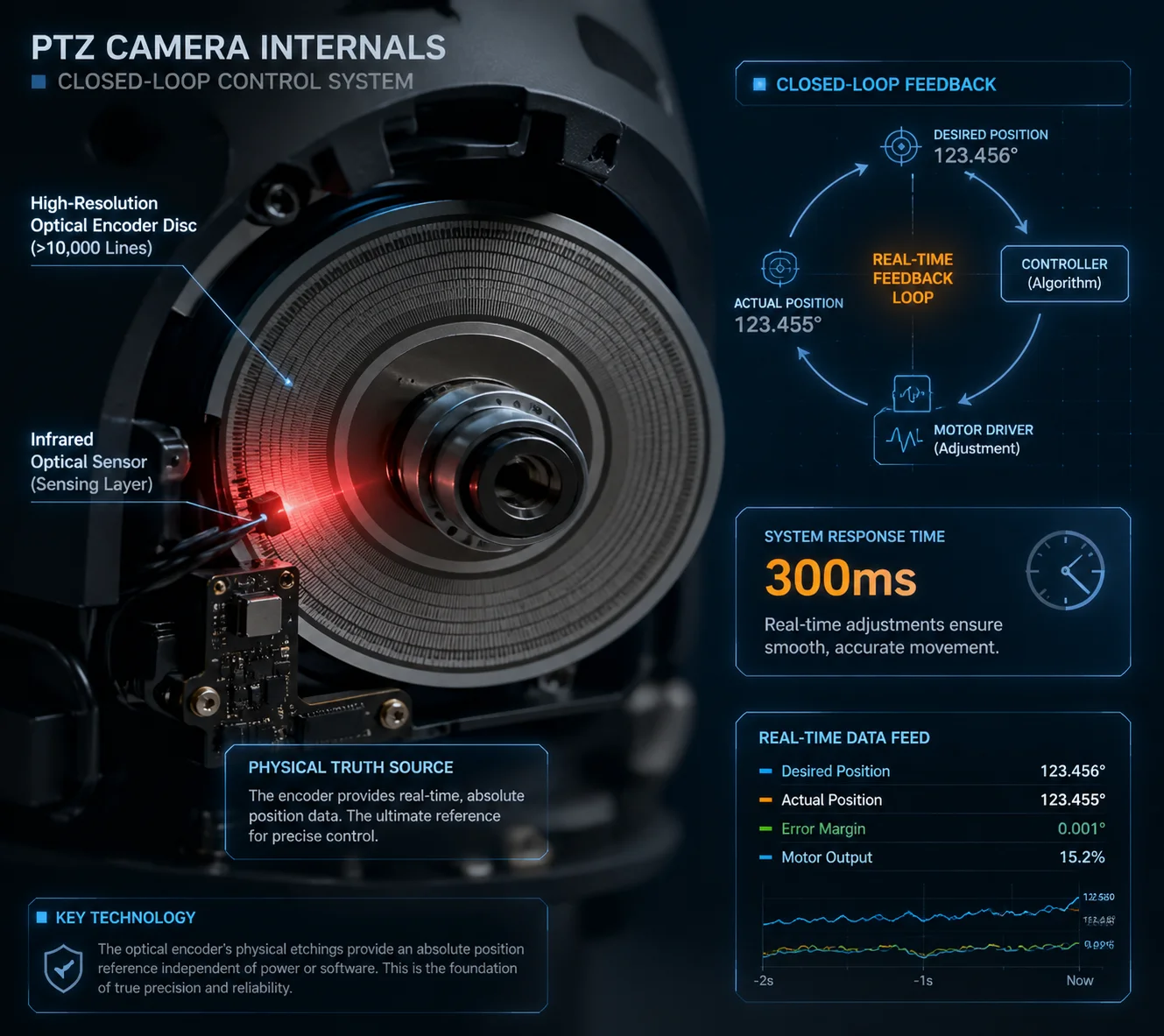
Unser hochpräziser optischer Encoder dient als physikalische Wahrheitsquelle. Er überwacht kontinuierlich die tatsächliche Winkelposition der Pan- und Tilt-Achsen. Weicht die tatsächliche Position von der befohlenen Position ab - auch nur um einen Bruchteil eines Grades - korrigiert das System dies innerhalb von 300 Millisekunden.
 Hochpräziser optischer Encoder für PTZ-Kamera
Hochpräziser optischer Encoder für PTZ-Kamera
Offener Kreislauf vs. geschlossener Kreislauf: Warum das wichtig ist
Die meisten preisgünstigen PTZ-Kameras verwenden ein Open-Loop-System. Die Steuerung sendet einen Befehl: “Bewege dich 500 Schritte nach rechts.” Der Motor bewegt sich 500 Schritte. Die Steuerung geht davon aus, dass sich die Kamera nun im richtigen Winkel befindet. Aber das wird nie überprüft.
Das ist wie Autofahren mit geschlossenen Augen. Man dreht das Lenkrad um 30 Grad und hofft, dass man auf der richtigen Spur ist. Eine Zeit lang funktioniert es. Dann nicht mehr.
Bei einem geschlossenen Kreislauf wird ein Sensor hinzugefügt, der ständig die aktuelle Position misst. Wenn der Motor um 2 Schritte überschwingt, sieht der Sensor dies und der Regler sendet eine Korrektur. Das ist der Unterschied zwischen "hoffen" und "wissen".
Wie unser Encodersystem funktioniert
Unser Encodersystem besteht aus zwei Schichten:
Ebene 1: Lichtschranke Nullpunktsensor. Dies ist eine einfache, aber entscheidende Komponente. Ein kleines optisches Tor befindet sich an einer festen physischen Position auf der Schwenk- und Neigeachse. Jedes Mal, wenn die Kamera eingeschaltet wird, dreht sie sich, bis sie auf dieses Tor trifft. Das ist die absolute Nullreferenz. Alle voreingestellten Positionen werden von diesem Punkt aus berechnet. Das bedeutet, dass selbst wenn der elektronische Zähler während eines Stromausfalls beschädigt wurde, die Kamera beim nächsten Einschalten ihren wahren Nullpunkt findet. Der akkumulierte Fehler ist verschwunden.
Schicht 2: Hochauflösende optische Disc (optional für High-End-Projekte). Für kritische Installationen - Grenzüberwachung, Flughafenperimeter, Autobahnüberwachung - bieten wir optional ein hochauflösendes optischer Encoder 2 Scheibe. Auf dieser Scheibe sind Tausende von präzise geätzten Linien angebracht. Ein Sensor liest diese Linien in Echtzeit, während sich die Kamera bewegt. Das Ergebnis ist eine kontinuierliche, absolute Positionsrückmeldung.
Was passiert, wenn der Wind auf die Kamera drückt?
Dies ist ein reales Szenario, das die meisten technischen Datenblätter ignorieren. Eine starke Windböe trifft auf das Kameragehäuse. Der Kopf weicht um 0,2° von seiner Voreinstellung ab. Ohne einen Encoder weiß die Kamera nicht, dass sie sich bewegt hat. Sie sitzt einfach da und zeigt auf die falsche Stelle.
Mit unserem optischen Encoder erkennt das System die Verschiebung sofort. Innerhalb von 300 Millisekunden wird der Motor aktiviert und schiebt den Kopf zurück in die richtige Position. Der Bediener sieht nicht einmal, wie es geschieht.
| System Typ | Erkennt die externe Störung? | Selbstkorrekturen? | Langfristige Drift |
|---|---|---|---|
| Open-Loop (kein Geber) | Nein | Nein | Kumuliert sich im Laufe der Zeit |
| Nur Nullpunkt | Nein (nur bei Neustart) | Nur bei Neustart | Rückstellung bei jedem Stromzyklus |
| Vollständig optischer Encoder | Ja, in Echtzeit | Ja, innerhalb von 300 ms | Effektiv null |
Kann ich eine Fernkalibrierung durchführen, wenn die voreingestellte Genauigkeit abnimmt?
Sie haben 200 Kameras, die über drei Staaten verteilt sind. Eine von ihnen zeigt eine voreingestellte Abweichung. Sie können nicht an jeden Standort einen Techniker schicken, nur um eine Kamera neu zu kalibrieren.
Ja, Sie können eine Remote-Nullpunktkalibrierung über die Webschnittstelle oder Ihr VMS auslösen. Die Kamera führt automatisch ihre Referenzfahrt durch, findet den physischen Nullpunktsensor und setzt alle voreingestellten Referenzen zurück. Ein Besuch vor Ort ist nicht erforderlich.
 Schnittstelle zur Fernkalibrierung von PTZ-Kameras
Schnittstelle zur Fernkalibrierung von PTZ-Kameras
Wann sollten Sie rekalibrieren?
In den meisten Fällen sollten Sie nie eine manuelle Neukalibrierung vornehmen müssen. Die Kamera führt dies bei jedem Einschalten automatisch durch. Es gibt jedoch einige Situationen, in denen eine manuelle Neukalibrierung aus der Ferne sinnvoll ist:
- Nach einem Firmware-Update, das die Parameter der Motorsteuerung ändert.
- Nachdem die Kamera mehrere Monate lang ununterbrochen ohne Neustart in Betrieb war.
- Nach einem bekannten physikalischen Ereignis - wie einem schweren Sturm, einem Erdbeben oder wenn jemand die Kamera bei Wartungsarbeiten anstößt.
- Wenn Sie auf Ihrem VMS bemerken, dass eine Voreinstellung leicht von ihrem Sollwert abweicht.
Wie der Fernkalibrierungsprozess funktioniert
Das Verfahren ist einfach. Sie melden sich bei der Weboberfläche der Kamera an. Gehen Sie auf die Seite mit den PTZ-Einstellungen. Sie klicken auf “Home Reset” oder “Nullpunktkalibrierung”. Die Kamera schwenkt und neigt sich, bis sie die Lichtschranke auf jeder Achse findet. Dies dauert etwa 10 Sekunden. Danach werden alle 256 Voreinstellungen anhand der neuen Nullreferenz neu berechnet.
Sie können dies auch automatisch planen. Sie können die Kamera zum Beispiel so einstellen, dass sie jeden Sonntag um 3:00 Uhr morgens neu kalibriert wird. Während dieses 10-Sekunden-Fensters bewegt sich die Kamera kurz, um ihren Nullpunkt zu finden, und kehrt dann zu ihrer Patrouille oder Voreinstellung zurück. Für die meisten Projekte ist dies mehr als ausreichend, um die Drift auf Null zu halten.
Eine praktische Überprüfungsmethode, die Sie anwenden können
Woher wissen Sie nach der Rekalibrierung, dass sie tatsächlich funktioniert hat? Hier ist eine Methode, die ich allen unseren Integratoren empfehle.
Wählen Sie eine Voreinstellung, die auf ein festes, kontrastreiches Merkmal zeigt - eine Gebäudeecke, einen Mast, eine gemalte Linie. Machen Sie einen Screenshot. Dies ist Ihr Referenzbild. Notieren Sie die Pixelkoordinaten dieses Merkmals.
Rufen Sie nach der Neukalibrierung die gleiche Voreinstellung auf. Machen Sie ein weiteres Bildschirmfoto. Vergleichen Sie die Pixelkoordinaten. Wenn sich das Merkmal um weniger als 3 Pixel bewegt hat (bei einem typischen HFOV von 60° auf einem 1080p-Sensor), liegen Sie innerhalb von 0,1°.
Sie können dies von Ihrem Schreibtisch aus tun. Keine Leiter. Keine Lkw-Rolle. Kein verschwendeter Nachmittag.
Pixel-zu-Winkel-Konvertierung Referenz
| Horizontales FOV | Auflösung | Grad pro Pixel | Erlaubte Bildpunkte für 0,1° |
|---|---|---|---|
| 60° | 1920 px | 0.031° | ~3,2 px |
| 30° | 1920 px | 0.016° | ~6,4 px |
| 3° (40facher Zoom) | 1920 px | 0.0016° | ~64 px |
Beachten Sie etwas Interessantes in dieser Tabelle. Bei 40-fachem Zoom ist das FOV sehr schmal - etwa 3°. Das bedeutet, dass jedes Pixel einen viel kleineren Winkel abdeckt. Eine Abweichung von 0,1° würde sich also als eine Verschiebung von 64 Pixeln auf dem Bildschirm bemerkbar machen. Das ist enorm. Man würde es sofort sehen. Aus diesem Grund ist die mechanische Präzision bei hohen Zoomstufen am wichtigsten.
Wird die 0,1-Grad-Genauigkeit auch beim maximalen optischen 40fach-Zoom beibehalten?
Dies ist die Frage, die Marketingaussagen von der technischen Realität trennt. Jede Kamera kann 0,1° im Weitwinkelbereich erreichen. Der wirkliche Test findet bei 40-fachem Zoom statt, wo jeder noch so kleine Fehler vergrößert wird.
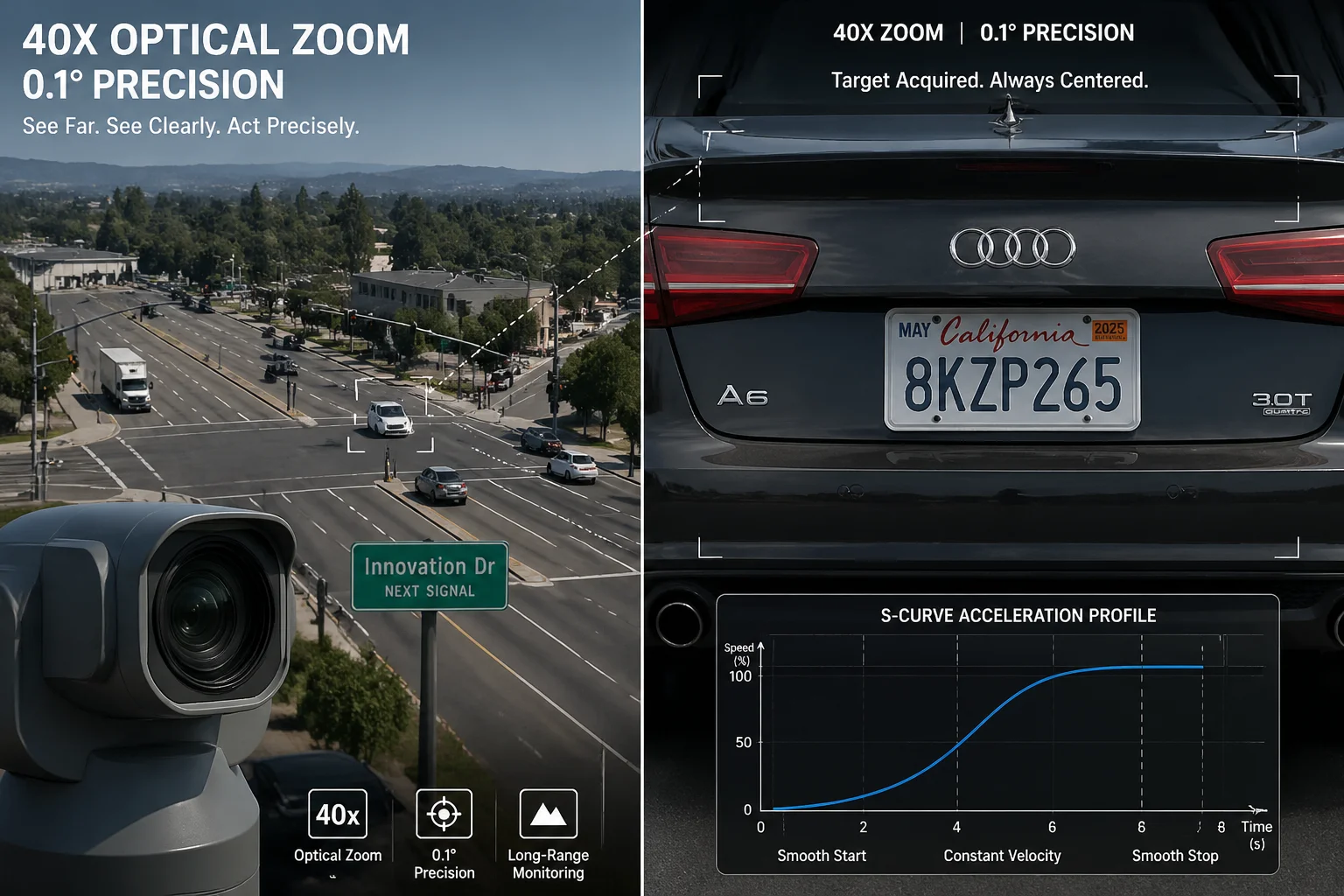
Ja. Die mechanische Genauigkeit von 0,1° ist eine Eigenschaft des Schwenk-Neige-Mechanismus, nicht des Objektivs. Sie bleibt unabhängig von der Zoomstufe gleich. Aber bei einem 40-fachen Zoom wird die visuelle Auswirkung eines Fehlers von 0,05° sehr deutlich - und das ist genau der Grund, warum unsere mechanische Präzision so hoch sein muss.
 PTZ-Kamera mit 40fachem optischem Zoom und voreingestellter Genauigkeit
PTZ-Kamera mit 40fachem optischem Zoom und voreingestellter Genauigkeit
Warum Zoom das Problem vergrößert
Lassen Sie mich dies anhand eines einfachen Beispiels erklären. Bei Weitwinkel (60° FOV) sieht Ihre Kamera einen 100 Meter breiten Bereich in 500 Metern Entfernung. Ein Fehler von 0,1° verschiebt die Bildmitte um etwa 0,87 Meter. Das würden Sie wahrscheinlich gar nicht bemerken.
Bei 40-fachem Zoom schrumpft das Sichtfeld auf etwa 1,5°. Jetzt sieht Ihre Kamera bei gleichem Abstand nur noch einen 13 Meter breiten Bereich. Der gleiche Fehler von 0,1° verschiebt das Zentrum immer noch um 0,87 Meter. Aber jetzt sind 0,87 Meter ein erheblicher Teil des gesamten Sichtfelds. Das Gesicht einer Person, das in der Mitte lag, befindet sich jetzt am Rand des Bildes - oder ist ganz verschwunden.
Deshalb sagen wir: Die voreingestellte Genauigkeit ist keine Zoom-Spezifikation. Sie ist eine mechanische Spezifikation. Der Motor, der Riemen, der Encoder - sie wissen nicht, auf welcher Zoomstufe sich das Objektiv befindet, und es ist ihnen auch egal. Sie müssen nur den Kopf in den richtigen Winkel bringen. Jedes Mal.
Die Technik hinter der konsistenten Genauigkeit
Drei Dinge machen dies in unserem Werk möglich:
256 Mikroschritt-Motorsteuerung. Indem wir jeden 1,8°-Motorschritt in 256 Mikroschritte unterteilen, erreichen wir einen minimal steuerbaren Winkel von etwa 0,007°. Damit haben wir mehr als das 14-fache der Auflösung, die wir für eine Genauigkeit von 0,1° benötigen. Dieser Spielraum ist beabsichtigt. Er bedeutet, dass wir 0,1° auch dann noch erreichen können, wenn einige Mikroschritte aufgrund von Reibung oder Last verloren gehen.
S-Kurven-Beschleunigung und -Verzögerung. Wenn sich die Kamera auf eine Voreinstellung zubewegt, kommt sie nicht einfach zum Stillstand. Sie folgt einem S-förmigen Geschwindigkeitsprofil - langsamer Start, sanfte Beschleunigung, allmähliche Abbremsung, sanfter Stopp. Dadurch wird die mechanische Erschütterung, die zum Überschwingen führt, eliminiert. Ohne die S-Kurven-Steuerung kann ein sich schnell bewegender PTZ-Kopf um 0,2° bis 0,5° über sein Ziel hinausschießen, bevor er sich einpendelt. Mit der S-Kurven-Steuerung ist das Überschwingen gleich null.
Dynamischer Verschleißausgleich. Unsere Firmware verfolgt, wie viele Zyklen jede Achse absolviert hat. Wenn die Anzahl der Zyklen steigt, wendet der Algorithmus einen kleinen Korrekturfaktor an, um den Riemenverschleiß und die Änderungen der Lagerreibung zu berücksichtigen. Dabei handelt es sich nicht um einen festen Offset, sondern um einen gelernten Wert, der über die Lebensdauer der Kamera aktualisiert wird. Das Ergebnis ist, dass eine Kamera mit 50.000 Zyklen die Voreinstellungen genauso genau trifft wie ein fabrikneues Gerät.
Testen Sie es selbst mit 40fachem Zoom
Wenn Sie unsere Kameras - oder jede andere PTZ-Kamera - evaluieren, schlage ich Folgendes vor:
- Stellen Sie die Kamera auf 40fachen Zoom ein.
- Richten Sie es auf ein entferntes Objekt mit scharfen Kanten (ein Schild, einen Fensterrahmen, einen Pfosten).
- Speichern Sie dies als Voreinstellung 1.
- Bewegen Sie die Kamera in eine völlig andere Position (Voreinstellung 2).
- Rufen Sie Preset 1 erneut auf.
- Vergleichen Sie das Bild mit Ihrer Referenz.
- Wiederholen Sie dies 50 Mal.
Wenn das Zielmerkmal innerhalb von 3 Pixeln auf einem 1080p-Bild bei 60° HFOV bleibt - oder innerhalb der entsprechenden Pixelzahl für Ihr tatsächliches FOV -, ist die Kamera erfolgreich. Wenn sie abweicht, haben Sie ein Problem. Und das werden Sie wissen, bevor Sie eine einzelne Kamera an einem Mast installieren.
Schlussfolgerung
Die voreingestellte Genauigkeit von weniger als 0,1° ist das Ergebnis leistungsfähiger Hardware, intelligenter Algorithmen und physikalischer Selbstkalibrierung - nicht nur eine Zahl auf einem Datenblatt. Testen Sie es. Überprüfen Sie es. Dann vertrauen Sie ihr.
1. Schrittmotorsteuerung und inhärente Schrittverlustrisiken. ︎ 2. Optischer Drehgeber für absolute Positionsrückmeldung. ︎ 3. Wärmeausdehnungseigenschaften von kevlarverstärkten Gurten. ︎ 4. Entwurf eines Schaltkreises zur Nullpunktkalibrierung eines Photounterbrechers. ︎ 5. Vergleich des Drehmoments und der Präzision zwischen 256 Mikroschritten und Vollschritten. ︎ 6. S-Kurven-Bewegungsprofilierung zur Reduzierung mechanischer Stöße. ︎ 7. Algorithmus zur dynamischen Verschleißkompensation für langfristige Genauigkeit. ︎ 8. Pixel-zu-Winkel-Konvertierung für voreingestellte Verifizierungstests. ︎ 9. PTZ-Motorsteuerungsmethoden mit geschlossenem oder offenem Regelkreis. ︎ 10. ONVIF PTZ-Dienst für Fernkalibrierungsbefehle. ︎