
Certa vez, assisti a uma demonstração de PTZ 40X em que a imagem saltava quadro a quadro como uma apresentação de slides. Aquele momento me disse que movimento suave é tudo.
Os motores de passo eliminam a aparência de “degrau” no zoom de 40X usando a tecnologia de microstepping que divide cada passo físico em 256 ou mais subdivisões, combinada com perfis de aceleração de curva S e feedback de codificador de loop fechado. Juntas, essas técnicas transformam saltos bruscos e visíveis em movimentos fluidos e contínuos da câmera que parecem naturais, mesmo no ângulo de telefoto mais estreito.
 Movimento suave do motor de passo da câmera PTZ com zoom de 40X
Movimento suave do motor de passo da câmera PTZ com zoom de 40X
Na Loyalty-Secu, construímos câmeras PTZ 38X e 40X todos os dias. Passamos anos ajustando os drivers de motor, as relações de engrenagem e o firmware para resolver exatamente esse problema. A seguir, apresentarei as quatro perguntas mais comuns que nossos clientes fazem sobre o desempenho do motor de passo com zoom alto. Cada resposta se aprofunda na engenharia para que você possa escrever especificações melhores e escolher fornecedores melhores.
Índice
A sua câmera usa a tecnologia Micro-Stepping para uma panorâmica lenta ultra-suave?
Já vi muitas câmeras PTZ que afirmam ter “panorâmica suave” na folha de dados, mas que apresentam gagueira visível a 30X ou mais. A diferença entre o marketing e a realidade é enorme.
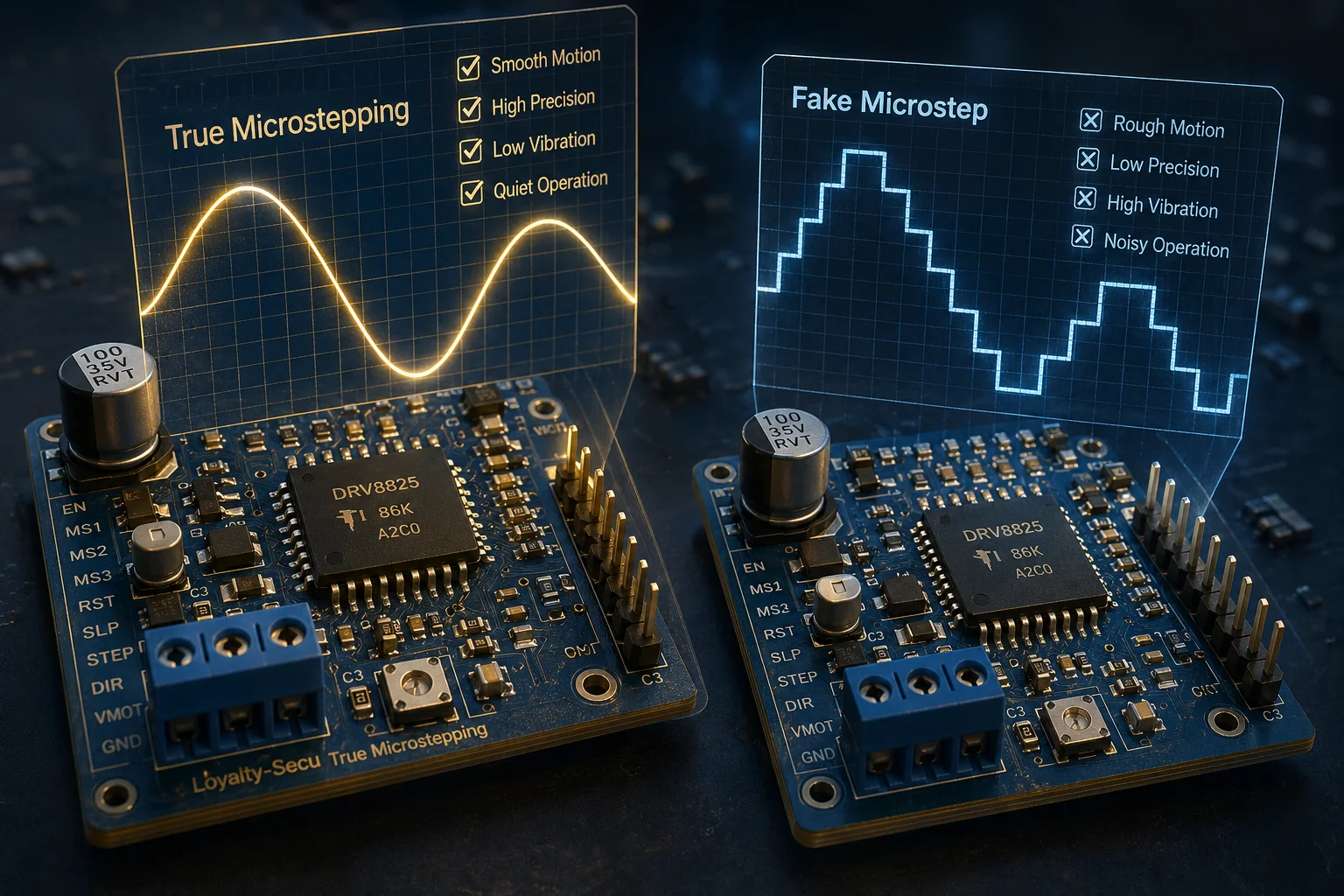
Sim, nossas câmeras usam o verdadeiro microstepping com controle de corrente de onda senoidal em subdivisão de 1/128 ou 1/256. Isso divide uma etapa completa padrão de 1,8° em milhares de subetapas minúsculas, de modo que a cabeça panorâmica se move em uma rotação quase contínua, em vez de saltar de uma posição para outra.
 Controle de corrente de onda senoidal do driver do motor de microstepping PTZ
Controle de corrente de onda senoidal do driver do motor de microstepping PTZ
Por que a condução em etapas completas falha em 40X
Um motor de passo bifásico padrão tem um ângulo de passo de 1,8°. Isso significa 200 passos por volta completa. Se a relação de engrenagem for de 1:10, cada passo de saída será de 0,18°. Isso parece pequeno. Mas com o zoom de 40X, o campo de visão é extremamente estreito, geralmente menos de 2°. Portanto, um único salto de 0,18° move a imagem em aproximadamente 9% de todo o quadro. Seu espectador vê um estalo forte e visível.
Agora compare isso com o microstepping de 1/256. Cada etapa de saída torna-se 0,18° ÷ 256 = 0,000703°. Isso é tão pequeno que, mesmo em 40X, o deslocamento da imagem por etapa é invisível ao olho humano.
Microstepping real vs. falso
Nem todos os microstepping são iguais. Drivers baratos apenas alteram o número em um registro, mas não moldam de fato a forma de onda atual. O resultado é o que os engenheiros chamam de “subdivisão falsa”. O motor ainda vibra e pula porque a corrente em cada bobina não está seguindo uma curva senoidal limpa.
O verdadeiro microstepping requer:
- Perfil de corrente de onda senoidal em ambas as fases (Fase A = sin, Fase B = cos).
- Detecção de corrente de alta resolução para que o driver possa manter cada microposição com precisão.
- Layout de PCB de baixo ruído para evitar que a interferência elétrica distorça a forma de onda.
| Recurso | Cheap Driver (Fake Microstep) | Driver de qualidade (True Microstep) |
|---|---|---|
| Configuração de subdivisão | 1/16 ou 1/32 no papel | 1/128 ou 1/256 verificado |
| Forma de onda atual | Escada irregular | Onda senoidal suave |
| Vibração em baixa velocidade | Zumbido alto e audível | Muito baixo, quase silencioso |
| Qualidade de imagem com panorâmica de 40X | Gagueira visível | Deslizamento suave e contínuo |
| Exemplos típicos de chips | Clones genéricos chineses | TI DRV8825, TMC2209/5160 |
O que perguntar ao seu fornecedor
Quando você avaliar uma PTZ de qualquer fábrica, pergunte por duas coisas:
- Um vídeo em câmera lenta gravado com o zoom óptico máximo. Reproduza-o quadro a quadro. Se você observar saltos discretos, o microstepping não está funcionando corretamente.
- O modelo do chip do driver e a taxa de subdivisão real. Uma fábrica de boa reputação compartilhará isso sem hesitação.
Na Loyalty-Secu, fornecemos esses vídeos de teste como parte de nosso processo padrão de avaliação de amostras. Acreditamos que, se o desempenho do motor não sobreviver a um teste de vídeo, ele não deverá ser enviado.
Por que a imagem parece “irregular” em PTZs baratas ao seguir uma pessoa distante?
Tive um cliente no Canadá que comprou 50 unidades PTZ econômicas para um projeto de tubulação. Com zoom total, o rastreamento automático parecia que a câmera estava tendo uma convulsão. Ele substituiu todas as 50 em seis meses.
A aparência irregular é causada por três problemas combinados: resolução de passo grosseiro que cria saltos visíveis, ressonância mecânica que amplifica a vibração em determinadas velocidades e comandos abruptos de início e parada que fazem com que o conjunto da lente trema. As PTZs baratas reduzem os custos em todas as três áreas, portanto o problema se multiplica em distâncias focais longas.
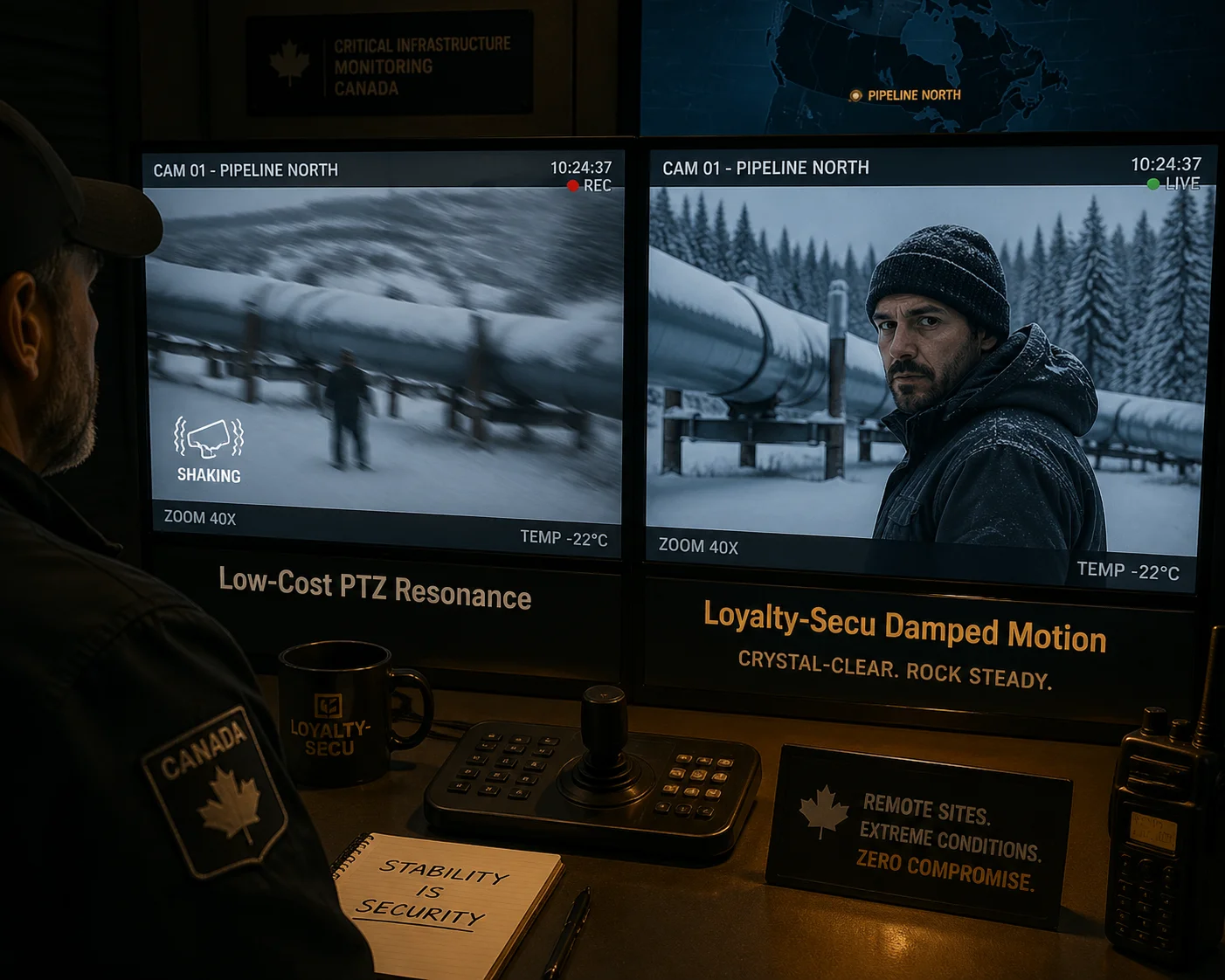 Comparação entre imagem PTZ instável e imagem PTZ suave com zoom alto
Comparação entre imagem PTZ instável e imagem PTZ suave com zoom alto
Problema 1: resolução de etapas grosseiras
Como expliquei acima, um driver de passo completo ou meio passo com zoom de 40X produz saltos na imagem que são claramente visíveis. Mas as PTZs baratas vão ainda mais longe na direção errada. Elas geralmente usam motores com ângulos de passo de 7,5° (apenas 48 passos por revolução) porque esses motores custam menos. Mesmo com microstepping de 1/16, cada passo de saída ainda é muito grande para o trabalho com telefoto.
Problema 2: Zonas de ressonância
Todo motor de passo tem frequências de ressonância naturais. Quando a velocidade do motor corresponde a uma dessas frequências, a vibração aumenta drasticamente. Em uma PTZ barata, o firmware não sabe sobre essas zonas. Ele simplesmente aciona o motor na velocidade que o joystick comandar. Se essa velocidade cair em uma zona de ressonância, a câmera inteira treme.
Um bom firmware mapeia as zonas de ressonância durante a calibração de fábrica e passa por elas rapidamente ou as evita completamente.
Problema 3: Partida e parada forçadas
Um controlador barato envia um comando de velocidade de onda quadrada: de zero a velocidade-alvo instantaneamente e, em seguida, de velocidade-alvo a zero instantaneamente. Isso cria um pico de torque em ambas as extremidades. O cabeçote da câmera se inclina para a frente, ultrapassa a velocidade e depois volta. Em 40X, esse salto é ampliado em um violento tremor de imagem que pode levar um segundo inteiro para se estabilizar.
Como as PTZs de qualidade resolvem todos os três problemas
| Problema | Abordagem PTZ barata | Abordagem PTZ de qualidade |
|---|---|---|
| Resolução de etapas | Motor de 7,5°, 1/8 microstep | Motor de 0,9°, 1/128+ microstep |
| Ressonância | Sem mapeamento de ressonância | O firmware ignora as zonas de ressonância |
| Iniciar/parar | Comando de onda quadrada | Curva em S ou rampa trapezoidal |
| Amortecimento | Sem amortecedor mecânico | Disco de inércia ou amortecedor de silicone no eixo |
| Trem de engrenagens | Engrenagens de plástico com folga | Engrenagens de metal com mola anti-folga |
O custo real do “barato”
Meu cliente no Canadá aprendeu isso da maneira mais difícil. As 50 unidades baratas lhe custaram $8.000 no início. Mas as unidades de substituição, a mão de obra para trocá-las em postes de tubulação remotos e a perda de credibilidade do contrato lhe custaram mais de $40.000. Quando você compra câmeras PTZ para projetos sérios, o sistema de motor não é o lugar para economizar dinheiro.
Posso ajustar a velocidade de pan/tilt dinamicamente com base no meu nível de zoom atual?
Recebo essa pergunta em quase todas as feiras de negócios. A resposta surpreende muitas pessoas, pois a maioria das câmeras PTZ já tem esse recurso, apenas o implementam de forma inadequada.
Sim, as câmeras PTZ profissionais podem e devem vincular automaticamente a velocidade de pan/tilt ao nível de zoom atual. Esse recurso é chamado de “panorâmica proporcional” ou “acoplamento de velocidade de zoom”. À medida que o zoom aumenta, o firmware reduz a velocidade máxima de panorâmica e inclinação para que a imagem se mova a uma velocidade confortável e visível na tela.
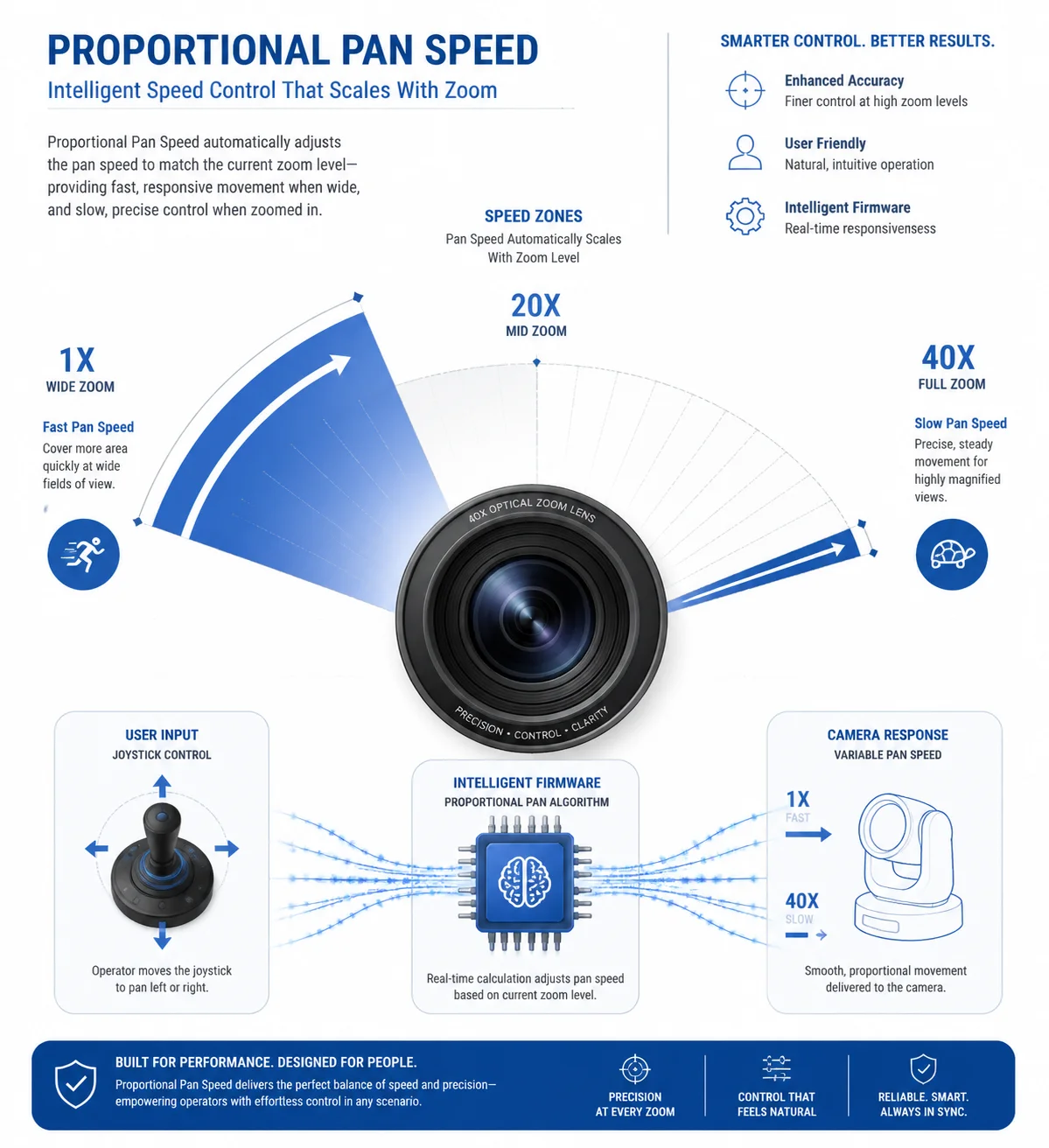 Velocidade panorâmica proporcional PTZ vinculada ao diagrama de nível de zoom
Velocidade panorâmica proporcional PTZ vinculada ao diagrama de nível de zoom
Por que isso é importante em 40X
Em um ângulo amplo de 1X, uma velocidade panorâmica de 100°/s parece normal. A cena se espalha pela tela em um ritmo confortável. Mas em 40X, os mesmos 100°/s fariam com que a imagem ficasse borrada em uma faixa ilegível. O campo de visão é 40 vezes mais estreito, portanto, cada grau de rotação move a imagem 40 vezes mais na tela.
Para manter a velocidade de movimento na tela constante, a velocidade panorâmica deve cair em um fator aproximadamente proporcional à taxa de zoom. Em 40X, isso significa que a velocidade panorâmica máxima deve ser de cerca de 2,5°/s ou menos.
Como o firmware lida com isso
O motor de zoom informa sua posição atual ao controlador principal. O controlador consulta uma tabela de limite de velocidade que mapeia cada posição de zoom para uma velocidade máxima permitida de pan/tilt. Quando o operador pressiona o joystick, o controlador limita a velocidade do motor ao valor da tabela.
O conceito de mesa com limite de velocidade
Aqui está um exemplo simplificado da aparência dessa tabela dentro do firmware:
| Nível de zoom | Campo de visão (horizontal) | Velocidade máxima da panorâmica | Velocidade máxima de inclinação |
|---|---|---|---|
| 1X | 58° | 120°/s | 90°/s |
| 10X | 5.8° | 12°/s | 9°/s |
| 20X | 2.9° | 6°/s | 4.5°/s |
| 30X | 1.9° | 4°/s | 3°/s |
| 40X | 1.45° | 2.5°/s | 2°/s |
O que acontece sem o acoplamento de velocidade de zoom
Sem esse recurso, o operador precisa reduzir manualmente a entrada do joystick em zoom alto. Isso é cansativo e impreciso. A maioria dos operadores ultrapassa o alvo e depois o corrige, criando uma oscilação para frente e para trás que parece pouco profissional nas filmagens gravadas.
Indo um passo além: Aceleração adaptativa
No Loyalty-Secu, nosso firmware não limita apenas a velocidade. Ele também ajusta a curva de aceleração com base no nível de zoom. Em 40X, o tempo de rampa da curva S é maior, de modo que a câmera entra em movimento mais suavemente. Em 1X, a rampa é mais curta para uma resposta rápida. Esse ajuste duplo - limite de velocidade e forma de aceleração - proporciona aos operadores uma “sensação” consistente em todos os níveis de zoom.
Se estiver escrevendo uma especificação para sua próxima compra de PTZ, inclua esta linha: “A velocidade de panorâmica/inclinação deve ser dimensionada automaticamente em proporção inversa à taxa de zoom óptico, com a aceleração da curva S ajustada por nível de zoom.” Essa única frase filtrará a maioria dos produtos de baixa qualidade.
Como o driver do motor minimiza a vibração no ângulo de telefoto mais estreito?
Passei três meses em 2022 trabalhando com nossa equipe de firmware para eliminar uma sutil vibração de 2 pixels que só aparecia em 38X e acima. Descobriu-se que era um problema de ressonância em uma velocidade de panorâmica muito específica. Consertar isso me ensinou muito.
O driver do motor minimiza a vibração na telefoto máxima combinando micropassos de alta subdivisão com prevenção de ressonância ativa, perfis de movimento de curva S e amortecimento mecânico. Juntos, esses métodos reduzem a ondulação do torque e evitam que o motor se mova em velocidades em que sua frequência natural cause oscilação.
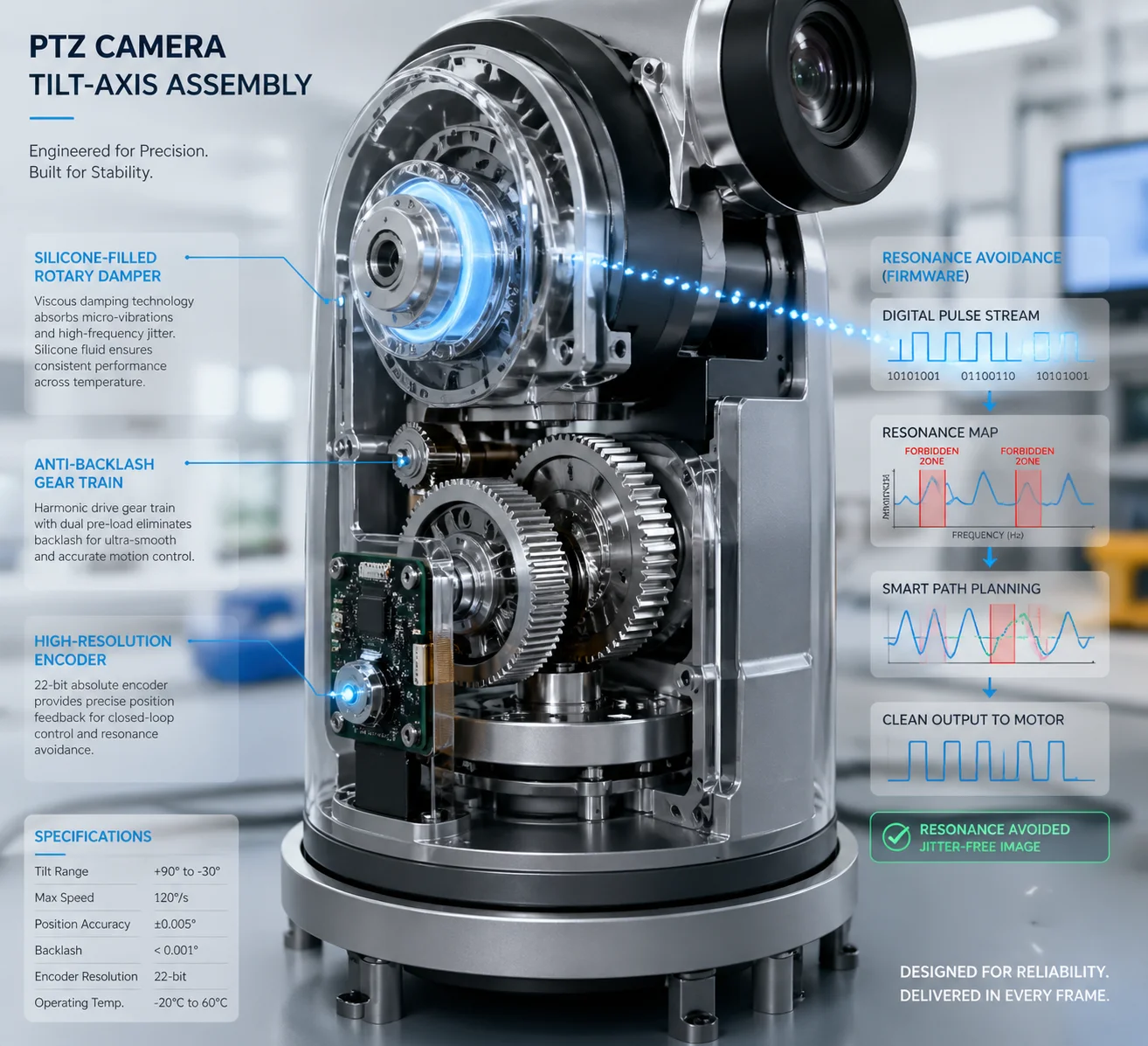 Sistema de amortecimento de vibração de motor de passo para câmera PTZ
Sistema de amortecimento de vibração de motor de passo para câmera PTZ
Entendendo a ondulação de torque
Todo motor de passo produz uma pequena flutuação no torque à medida que se move de um passo para o outro. Isso é chamado de ondulação de torque 1. Em um zoom baixo, essa ondulação é invisível porque o campo de visão é amplo. Porém, em 40X, até mesmo uma oscilação de 0,001° se traduz em uma oscilação de pixel visível na tela.
O micropasso reduz a ondulação de torque porque as transições de corrente entre as etapas são graduais, não abruptas. Um driver de micropasso de 1/256 produz ondulação de torque que é aproximadamente 1/256 da ondulação de passo completo. Isso geralmente é pequeno o suficiente para ser invisível mesmo em 40X.
Prevenção de ressonância ativa
Os motores de passo têm duas zonas principais de ressonância:
- Ressonância de baixa velocidade - normalmente em torno de 1-3 rev/s para motores pequenos. Essa é a zona mais perigosa para as câmeras PTZ, pois a panorâmica lenta com zoom alto geralmente cai diretamente nela.
- Instabilidade de médio porte - uma zona mais ampla onde o motor pode perder a sincronização.
Nosso firmware mede o perfil de ressonância de cada modelo de motor durante o desenvolvimento. Em seguida, ele programa “zonas proibidas” no controlador de velocidade. Quando a velocidade-alvo cai dentro de uma zona proibida, o controlador passa por ela rapidamente durante a aceleração ou muda para uma velocidade segura próxima.
Detalhes de amortecimento mecânico
Mesmo com um controle elétrico perfeito, alguma energia de vibração ainda chega ao corpo da câmera por meio do eixo do motor. Para absorver essa energia, usamos:
- Amortecedores rotativos preenchidos com silicone no eixo de saída do motor. Eles convertem a energia de vibração em calor.
- Trens de engrenagens anti-backlash que mantêm as engrenagens em contato constante, evitando o “ruído” que ocorre quando as engrenagens invertem a direção.
- Conjuntos de lentes balanceadas de modo que o centro de gravidade fique no eixo de rotação. Uma carga fora do centro cria um distúrbio de torque periódico uma vez por rotação.
A camada de firmware: Juntando tudo
A camada final é o firmware de controle de movimento. Ele recebe a entrada do joystick (ou o comando de rastreamento automático), aplica o limite de velocidade proporcional ao zoom, gera um perfil de velocidade de curva S, verifica se há conflitos na zona de ressonância e, em seguida, alimenta o chip do driver com um fluxo de pulsos de micropasso cronometrados com precisão.
Todo esse cálculo acontece em tempo real, milhares de vezes por segundo. O resultado é um movimento tão suave que o espectador esquece que a câmera está sobre uma plataforma mecânica. A imagem simplesmente desliza.
O que especificar ao importar
Se estiver adquirindo câmeras PTZ da China e precisar garantir um desempenho suave a 40X, coloque esses itens no seu documento de requisitos técnicos:
- Ângulo de passo de saída mínimo equivalente ≤ 0,003° (ângulo de passo do motor × relação de microstep × relação de engrenagem).
- O driver deve usar o controle de corrente de onda senoidal com microstepping verificado ≥ 1/32.
- O firmware deve implementar a aceleração da curva S com prevenção da zona de ressonância.
- O fornecedor deve fornecer vídeo de teste em câmera lenta com zoom óptico máximo como parte da aprovação da amostra.
- O fornecedor deve fornecer um vídeo de teste de movimento de 0,02° ponto a ponto para verificar a suavidade de uma única etapa.
Essas cinco linhas o salvarão do tipo de desastre que meu cliente canadense sofreu. Elas são simples de verificar e impossíveis de falsificar.
Conclusão
O movimento suave da PTZ 40X requer um verdadeiro microstepping, aceleração de curva S, prevenção de ressonância e amortecimento mecânico - trabalhando juntos, não isoladamente.
1. Ondulação de torque em motores de passo e redução de microstepping. ︎ 2. Perfil de corrente de onda senoidal para ICs de driver de motor de passo. ︎ 3. Zonas de ressonância do motor de passo e técnicas para evitá-la. ︎ 4. Perfil de movimento em curva S para redução de choques mecânicos. ︎ 5. Especificações de microstepping do driver de passo TI DRV8825. ︎ 6. TMC2209 SilentStep stick para controle do motor sem vibração. ︎ 7. Projeto de trem de engrenagens anti-backlash para mecanismos PTZ. ︎ 8. Seleção de amortecedor rotativo de silicone para amortecimento do eixo do motor. ︎ 9. Acoplamento de velocidade de zoom para controle de joystick PTZ em telefoto. ︎ 10. Feedback do codificador de loop fechado para detecção de perda de etapas. ︎