
J'ai regardé un jour une démonstration de PTZ 40X où l'image sautait image par image comme dans un diaporama. C'est à ce moment-là que j'ai compris que la fluidité des mouvements était essentielle.
Les moteurs pas à pas éliminent l'aspect “en escalier” au zoom 40X en utilisant la technologie du micro-pas qui divise chaque pas physique en 256 subdivisions ou plus, combinée à des profils d'accélération en courbe S et à un retour d'information de l'encodeur en boucle fermée. Ces techniques combinées transforment les sauts saccadés et visibles en mouvements fluides et continus de la caméra qui semblent naturels, même au téléobjectif le plus étroit.
 Moteur pas à pas de la caméra PTZ pour un mouvement fluide avec un zoom 40X
Moteur pas à pas de la caméra PTZ pour un mouvement fluide avec un zoom 40X
Chez Loyalty-Secu, nous construisons des caméras PTZ 38X et 40X tous les jours. Nous avons passé des années à mettre au point des pilotes de moteur, des rapports d'engrenage et des microprogrammes pour résoudre ce problème précis. Ci-dessous, je vais vous présenter les quatre questions les plus courantes que nos clients nous posent sur les performances des moteurs pas à pas à fort zoom. Chaque réponse va en profondeur dans l'ingénierie afin que vous puissiez rédiger de meilleures spécifications et choisir de meilleurs fournisseurs.
Table des matières
Votre caméra utilise-t-elle la technologie Micro-Stepping pour un panoramique lent et ultra-fluide ?
J'ai vu trop de caméras PTZ qui revendiquent un “panoramique fluide” sur la fiche technique, mais qui présentent des saccades visibles à 30X et plus. L'écart entre le marketing et la réalité est énorme.
Oui, nos caméras utilisent un véritable micro-pas avec un contrôle du courant sinusoïdal à une subdivision de 1/128 ou 1/256. Cela permet de diviser un pas complet standard de 1,8° en milliers de petits sous-pas, de sorte que la tête panoramique se déplace en rotation quasi-continue au lieu de sauter d'une position à l'autre.
 Pilote de moteur à micropas PTZ contrôle du courant sinusoïdal
Pilote de moteur à micropas PTZ contrôle du courant sinusoïdal
Pourquoi la conduite par étapes échoue à 40X
Un moteur pas à pas biphasé standard a un angle de pas de 1,8°. Cela signifie 200 pas par tour complet. Si votre rapport d'engrenage est de 1:10, chaque pas de sortie est de 0,18°. Cela semble peu. Mais avec un zoom de 40X, le champ de vision est extrêmement étroit, souvent inférieur à 2°. Ainsi, un seul saut de 0,18° déplace l'image d'environ 9% de l'ensemble du cadre. L'observateur perçoit un claquement brutal et visible.
Comparez maintenant cela au micropas 1/256. Chaque pas de sortie devient 0,18° ÷ 256 = 0,000703°. C'est si peu que même à 40X, le décalage de l'image par pas est invisible à l'œil humain.
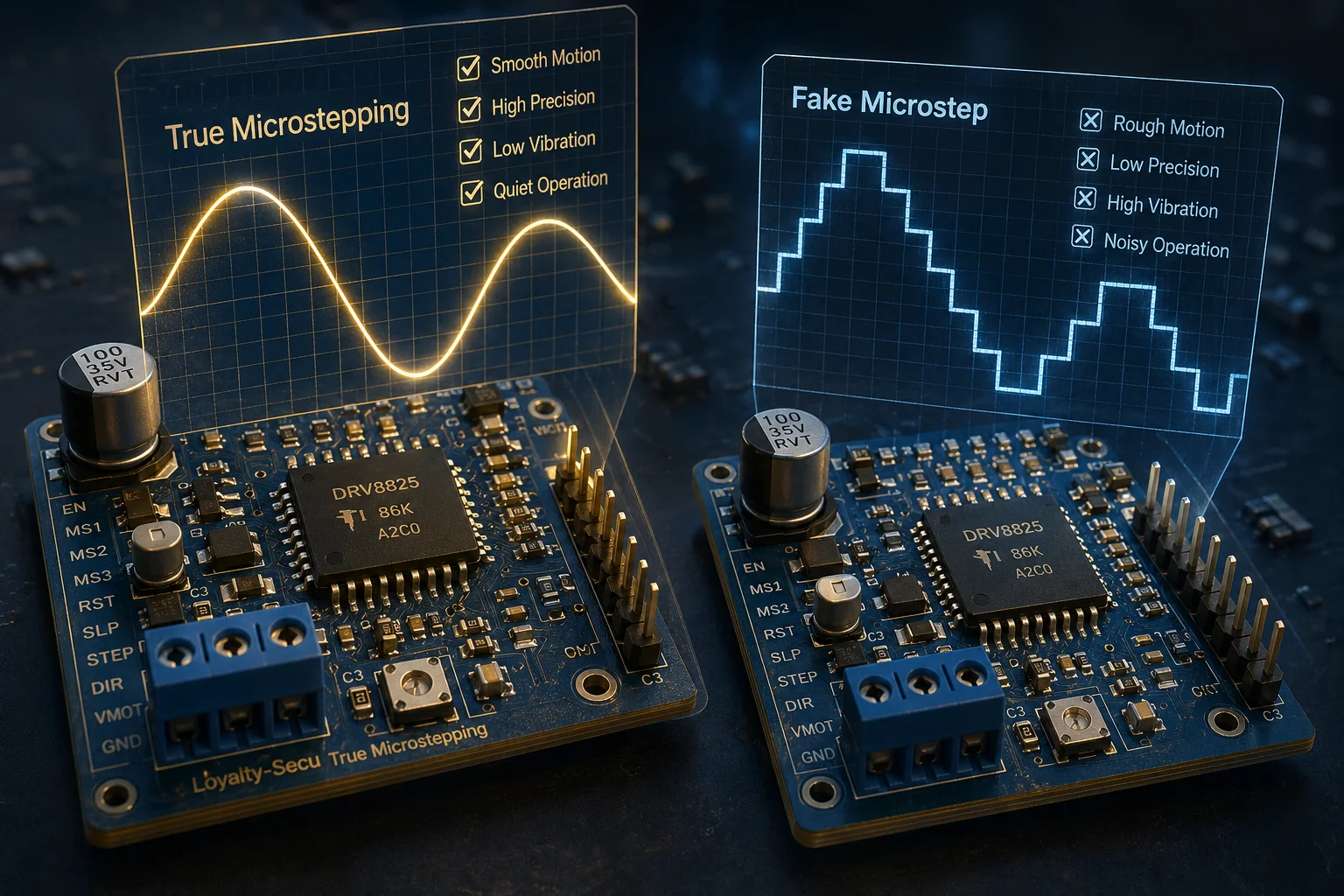
Vrai ou faux micro-pas
Tous les micropas ne sont pas égaux. Les pilotes bon marché se contentent de modifier le numéro d'un registre, mais ne façonnent pas réellement la forme d'onde actuelle. Le résultat est ce que les ingénieurs appellent une “fausse subdivision”. Le moteur continue de vibrer et de sauter parce que le courant dans chaque bobine ne suit pas une courbe sinusoïdale propre.
Un véritable micro-pas nécessite :
- Profilage du courant par onde sinusoïdale sur les deux phases (phase A = sin, phase B = cos).
- Détection de courant à haute résolution afin que le conducteur puisse maintenir chaque micro-position avec précision.
- Implantation de circuits imprimés à faible bruit pour éviter que des interférences électriques ne faussent la forme d'onde.
| Fonctionnalité | Cheap Driver (Fake Microstep) | Conducteur de qualité (True Microstep) |
|---|---|---|
| Cadre du lotissement | 1/16 ou 1/32 sur papier | 1/128 ou 1/256 vérifié |
| Forme d'onde actuelle | Escalier brut | Onde sinusoïdale lisse |
| Vibrations à faible vitesse | Bourdonnement élevé et audible | Très bas, presque silencieux |
| Qualité d'image à 40X pan | Bégaiement visible | Glissement doux et continu |
| Exemples de puces typiques | Clones génériques chinois | TI DRV8825, TMC2209/5160 |
Ce qu'il faut demander à votre fournisseur
Lorsque vous évaluez un PTZ, quel que soit le fabricant, demandez deux choses :
- Une vidéo au ralenti enregistrée avec le zoom optique maximum. Repassez-la image par image. Si vous voyez des sauts discrets, le micropas ne fonctionne pas correctement.
- Le modèle de puce du pilote et le taux de subdivision réel. Une usine réputée communiquera ces informations sans hésitation.
Chez Loyalty-Secu, nous fournissons ces vidéos de test dans le cadre de notre processus standard d'évaluation des échantillons. Nous pensons que si les performances d'un moteur ne résistent pas à un test vidéo, il ne doit pas être expédié.
Pourquoi l'image semble-t-elle “saccadée” sur les PTZ bon marché lorsque l'on suit une personne éloignée ?
J'avais un client au Canada qui avait acheté 50 unités PTZ pour un projet d'oléoduc. À plein zoom, le suivi automatique donnait l'impression que la caméra était en train de faire une crise d'épilepsie. Il a remplacé les 50 unités en l'espace de six mois.
L'aspect saccadé est dû à trois problèmes combinés : une résolution de pas grossière qui crée des sauts visibles, une résonance mécanique qui amplifie les vibrations à certaines vitesses et des commandes de démarrage et d'arrêt brusques qui font trembler l'ensemble de l'objectif. Les PTZ bon marché réduisent les coûts dans ces trois domaines, de sorte que le problème se multiplie aux longues distances focales.
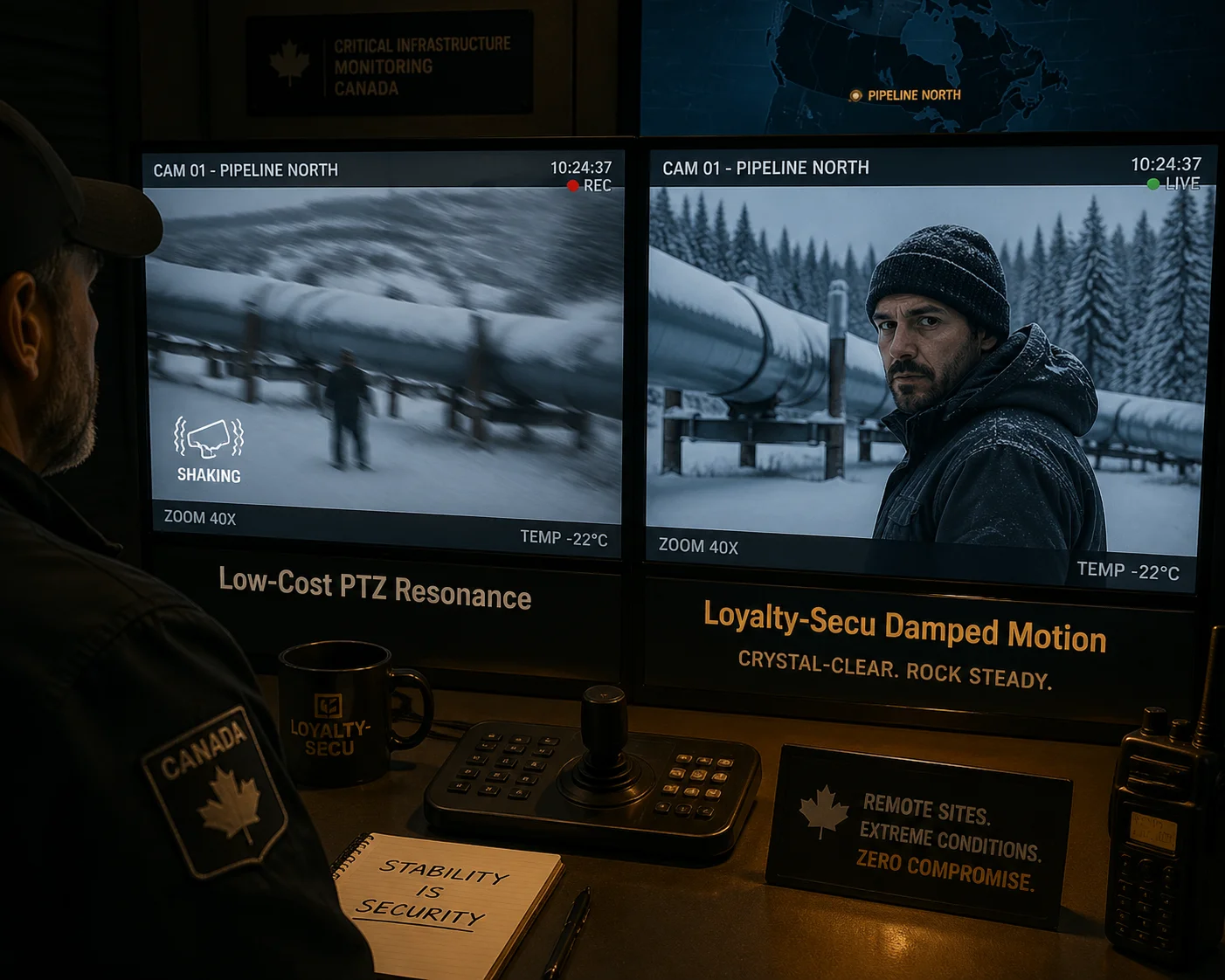 Comparaison des images PTZ saccadées et des images PTZ fluides à fort zoom
Comparaison des images PTZ saccadées et des images PTZ fluides à fort zoom
Problème 1 : Résolution de pas grossiers
Comme je l'ai expliqué plus haut, un pilote pas à pas ou demi-pas à un zoom de 40X produit des sauts d'image clairement visibles. Mais les PTZ bon marché vont encore plus loin dans la mauvaise direction. Elles utilisent souvent des moteurs avec des angles de pas de 7,5° (seulement 48 pas par tour) parce que ces moteurs coûtent moins cher. Même avec un micropas de 1/16, chaque pas de sortie est encore beaucoup trop grand pour le travail au téléobjectif.
Problème 2 : Zones de résonance
Chaque moteur pas à pas a des fréquences de résonance naturelles. Lorsque la vitesse du moteur correspond à l'une de ces fréquences, les vibrations augmentent considérablement. Dans une PTZ bon marché, le microprogramme ne connaît pas ces zones. Il se contente de faire tourner le moteur à la vitesse commandée par le joystick. Si cette vitesse se trouve dans une zone de résonance, toute la caméra tremble.
Les bons microprogrammes identifient les zones de résonance lors de l'étalonnage en usine et les traversent rapidement ou les évitent complètement.
Problème 3 : Démarrage et arrêt brutaux
Un contrôleur bon marché envoie une commande de vitesse en ondes carrées : de zéro à la vitesse cible instantanément, puis de la vitesse cible à zéro instantanément. Cela crée un pic de couple aux deux extrémités. La tête de la caméra s'incline vers l'avant, dépasse la vitesse cible, puis rebondit. À 40X, ce rebond est amplifié par un violent tremblement de l'image qui peut prendre une seconde entière pour se stabiliser.
Comment les PTZ de qualité résolvent ces trois problèmes
| Problème | Approche PTZ bon marché | Approche PTZ de qualité |
|---|---|---|
| Résolution par étapes | Moteur 7,5°, micro-pas 1/8 | Moteur 0,9°, micro-pas 1/128 |
| Résonance | Pas de cartographie de résonance | Le micrologiciel ne tient pas compte des zones de résonance |
| Démarrage/arrêt | Commande d'onde carrée | Courbe en S ou rampe trapézoïdale |
| Amortissement | Pas de registre mécanique | Disque d'inertie ou amortisseur en silicone sur l'arbre |
| Train d'engrenages | Engrenages en plastique avec jeu | Engrenages métalliques avec ressort anti-recul |
Le coût réel du “bon marché”
Mon client canadien l'a appris à ses dépens. Les 50 unités bon marché lui ont coûté $8 000 à l'avance. Mais les unités de remplacement, la main-d'œuvre nécessaire pour les échanger sur des poteaux de canalisation éloignés et la perte de crédibilité du contrat lui ont coûté plus de $40 000. Lorsque vous achetez des caméras PTZ pour des projets sérieux, ce n'est pas sur le système de motorisation qu'il faut faire des économies.
Puis-je ajuster la vitesse Pan/Tilt de manière dynamique en fonction de mon niveau de zoom actuel ?
Cette question m'est posée à presque tous les salons professionnels. La réponse en surprend plus d'un, car la plupart des caméras PTZ sont déjà dotées de cette fonction - elles la mettent simplement mal en œuvre.
Oui, les caméras PTZ professionnelles peuvent et doivent lier automatiquement la vitesse de panoramique et d'inclinaison au niveau de zoom actuel. Cette fonction est appelée “panoramique proportionnel” ou “couplage zoom-vitesse”. Au fur et à mesure que le zoom augmente, le microprogramme réduit la vitesse maximale de panoramique et d'inclinaison afin que l'image se déplace à une vitesse confortable et regardable à l'écran.
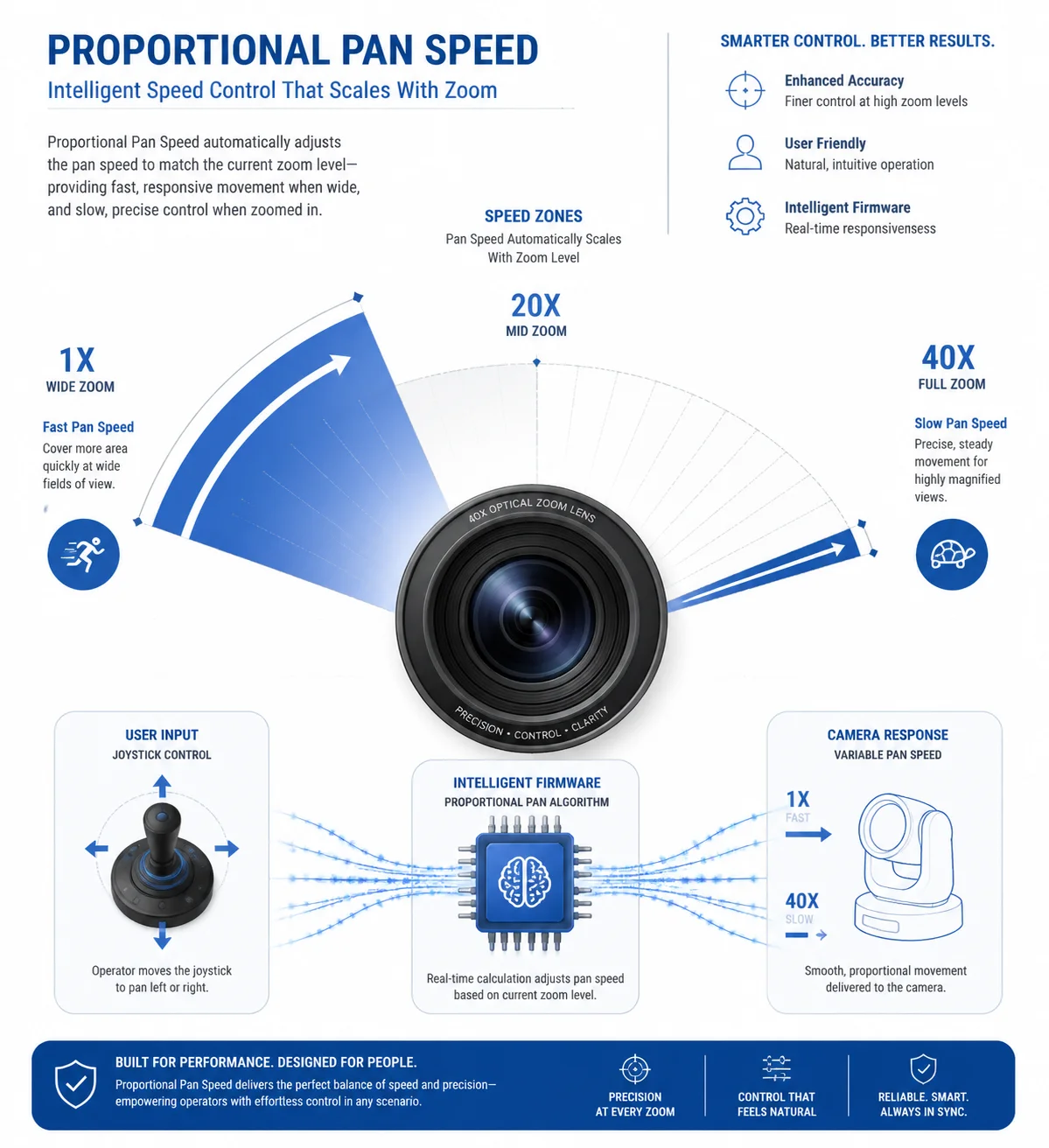 Vitesse panoramique proportionnelle PTZ liée au diagramme du niveau de zoom
Vitesse panoramique proportionnelle PTZ liée au diagramme du niveau de zoom
Pourquoi c'est important à 40X
Avec un grand angle de 1X, une vitesse panoramique de 100°/s semble normale. La scène défile à l'écran à un rythme confortable. Mais à 40X, la même vitesse de 100°/s rendrait l'image floue en une traînée illisible. Le champ de vision étant 40 fois plus étroit, chaque degré de rotation déplace 40 fois plus l'image à l'écran.
Pour que la vitesse de déplacement à l'écran reste constante, la vitesse panoramique doit diminuer d'un facteur à peu près proportionnel au taux de zoom. À 40X, cela signifie que la vitesse panoramique maximale doit être d'environ 2,5°/s ou moins.
Comment le micrologiciel gère cette situation
Le moteur de zoom signale sa position actuelle au contrôleur principal. Le contrôleur consulte un tableau de limitation de vitesse qui associe chaque position du zoom à une vitesse maximale autorisée pour le panoramique et l'inclinaison. Lorsque l'opérateur appuie sur le joystick, le contrôleur limite la vitesse du moteur à la valeur du tableau.
Le concept de table de limitation de vitesse
Voici un exemple simplifié de l'aspect de ce tableau à l'intérieur du microprogramme :
| Niveau de zoom | Champ de vision (horizontal) | Vitesse maximale du panoramique | Vitesse d'inclinaison maximale |
|---|---|---|---|
| 1X | 58° | 120°/s | 90°/s |
| 10X | 5.8° | 12°/s | 9°/s |
| 20X | 2.9° | 6°/s | 4.5°/s |
| 30X | 1.9° | 4°/s | 3°/s |
| 40X | 1.45° | 2.5°/s | 2°/s |
Ce qui se passe sans l'accouplement à vitesse variable
Sans cette fonction, l'opérateur doit réduire manuellement l'action du joystick en cas de zoom élevé. Cette opération est fatigante et imprécise. La plupart des opérateurs dépassent la cible, puis corrigent de manière excessive, créant un mouvement de va-et-vient qui n'est pas très professionnel sur les séquences enregistrées.
Aller plus loin : Accélération adaptative
Chez Loyalty-Secu, notre firmware ne se contente pas de plafonner la vitesse. Il ajuste également la courbe d'accélération en fonction du niveau de zoom. À 40X, la durée de la rampe de la courbe en S est plus longue, de sorte que l'appareil photo se met en mouvement plus doucement. À 1X, la rampe est plus courte pour une réponse rapide. Ce double réglage - limite de vitesse et courbe d'accélération - donne aux opérateurs une sensation cohérente à chaque niveau de zoom.
Si vous rédigez une spécification pour votre prochain achat de PTZ, incluez cette ligne : “La vitesse panoramique/inclinaison doit automatiquement être inversement proportionnelle au rapport de zoom optique, l'accélération de la courbe en S étant ajustée en fonction du niveau de zoom.” Cette simple phrase éliminera la plupart des produits bas de gamme.
Comment le pilote du moteur minimise-t-il les vibrations à l'angle de téléobjectif le plus étroit ?
J'ai passé trois mois en 2022 à travailler avec notre équipe chargée des microprogrammes pour éliminer une vibration subtile de 2 pixels qui n'apparaissait qu'à partir de 38X. Il s'est avéré qu'il s'agissait d'un problème de résonance à une vitesse de balayage très spécifique. La résolution de ce problème m'a beaucoup appris.
Le pilote du moteur minimise les vibrations au téléobjectif maximum en combinant le micro-pas à haute subdivision avec l'évitement actif de la résonance, les profils de mouvement de la courbe en S et l'amortissement mécanique. Ensemble, ces méthodes réduisent l'ondulation du couple et empêchent le moteur de tourner à des vitesses où sa fréquence naturelle provoque des oscillations.
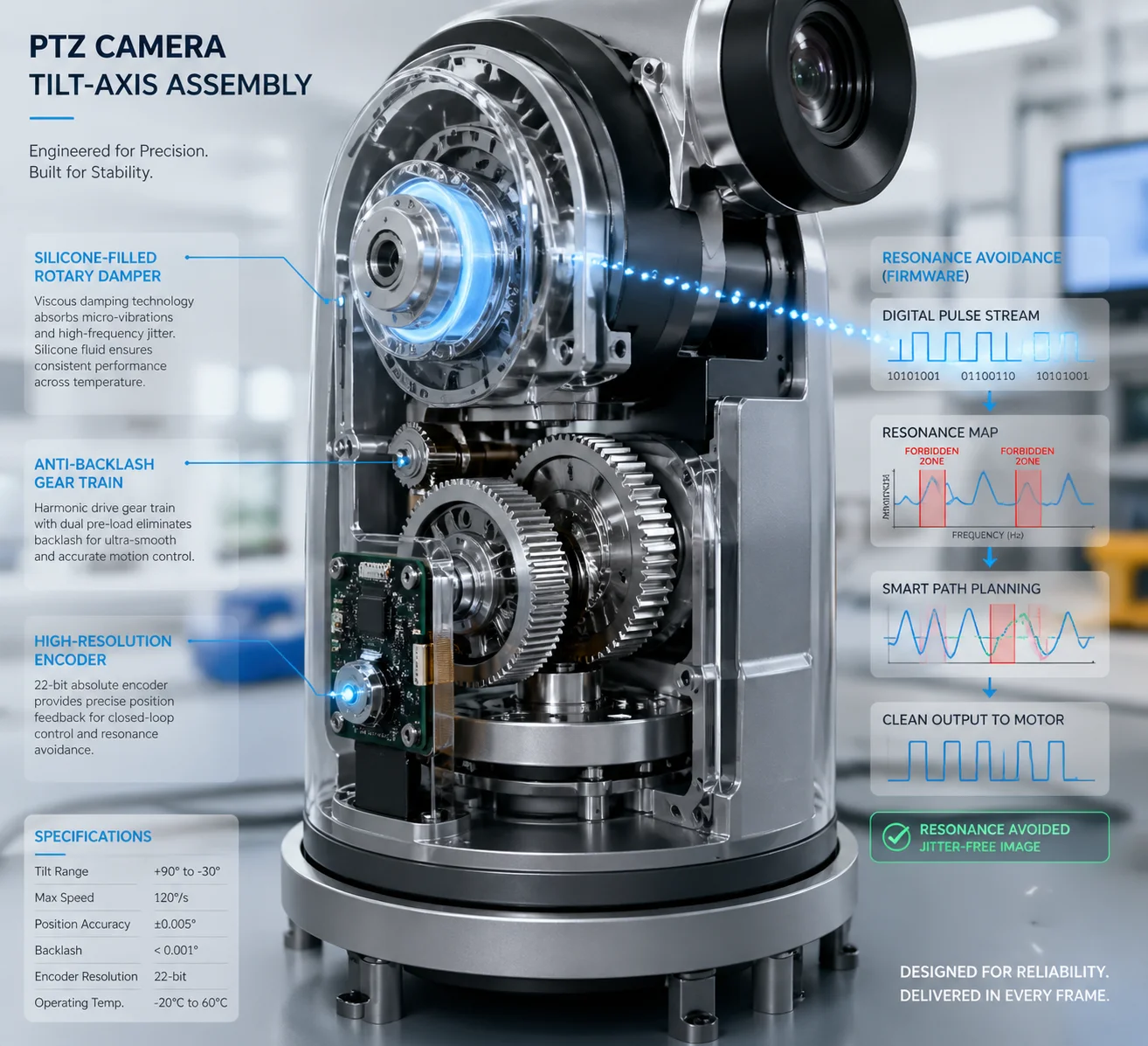 Système d'amortissement des vibrations du moteur pas à pas pour caméra PTZ
Système d'amortissement des vibrations du moteur pas à pas pour caméra PTZ
Comprendre l'ondulation du couple
Chaque moteur pas à pas produit une petite fluctuation de couple lorsqu'il passe d'un pas à l'autre. C'est ce qu'on appelle ondulation du couple 1. À faible zoom, cette ondulation est invisible car le champ de vision est large. Mais à 40X, même une oscillation de 0,001° se traduit par un tremblement de pixels visible à l'écran.
Le micropas réduit l'ondulation du couple parce que les transitions de courant entre les pas sont graduelles et non abruptes. Un circuit d'attaque à micropas 1/256 produit une ondulation de couple qui représente environ 1/256e de l'ondulation à pas complet. Cette ondulation est généralement suffisamment faible pour être invisible, même à 40X.
Évitement actif de la résonance
Les moteurs pas à pas ont deux zones de résonance principales :
- Résonance à basse vitesse - typiquement autour de 1-3 tours/s pour les petits moteurs. Il s'agit de la zone la plus dangereuse pour les caméras PTZ, car les panoramiques lents avec un zoom élevé tombent souvent dans cette zone.
- Instabilité du milieu de gamme - une zone plus large où le moteur peut perdre sa synchronisation.
Notre logiciel mesure le profil de résonance de chaque modèle de moteur au cours du développement. Il programme ensuite des “zones interdites” dans le contrôleur de vitesse. Lorsque la vitesse cible tombe à l'intérieur d'une zone interdite, le contrôleur la traverse rapidement pendant l'accélération ou passe à une vitesse de sécurité proche.
Détails de l'amortissement mécanique
Même avec un contrôle électrique parfait, une partie de l'énergie vibratoire atteint toujours le boîtier de l'appareil photo par l'intermédiaire de l'arbre du moteur. Pour absorber cette énergie, nous utilisons :
- Amortisseurs rotatifs remplis de silicone sur l'arbre de sortie du moteur. Ils convertissent l'énergie des vibrations en chaleur.
- Trains d'engrenages anti-recul qui maintiennent les engrenages en contact permanent, évitant ainsi le “clunk” qui se produit lorsque les engrenages s'inversent.
- Assemblages de lentilles équilibrés de sorte que le centre de gravité se trouve sur l'axe de rotation. Une charge décentrée crée une perturbation périodique du couple une fois par révolution.
La couche micrologicielle : L'assemblage de tous les éléments
La dernière couche est le microprogramme de contrôle des mouvements. Il prend l'entrée du joystick (ou la commande de suivi automatique), applique la limite de vitesse proportionnelle au zoom, génère un profil de vitesse en courbe S, vérifie les conflits de zone de résonance, puis envoie un flux d'impulsions de micropas chronométrées avec précision à la puce du pilote.
Tout ce calcul se fait en temps réel, des milliers de fois par seconde. Le résultat est un mouvement si fluide que le spectateur oublie que la caméra est posée sur une plate-forme mécanique. L'image glisse tout simplement.
Ce qu'il faut spécifier lors de l'importation
Si vous vous procurez des caméras PTZ en Chine et que vous avez besoin d'une garantie de fluidité à 40X, ajoutez ces éléments à votre document d'exigences techniques :
- Angle de pas de sortie équivalent minimal ≤ 0,003° (angle de pas du moteur × rapport de micropas × rapport d'engrenage).
- Le pilote doit utiliser une commande de courant sinusoïdale avec un micropas vérifié ≥ 1/32.
- Le micrologiciel doit mettre en œuvre l'accélération de la courbe en S en évitant les zones de résonance.
- Le fournisseur doit fournir une vidéo d'essai au ralenti avec un zoom optique maximal dans le cadre de l'approbation de l'échantillon.
- Le fournisseur doit fournir une vidéo d'essai de déplacement de 0,02° d'un point à l'autre pour vérifier la fluidité d'un seul pas.
Ces cinq lignes vous éviteront le désastre qu'a connu mon client canadien. Elles sont simples à vérifier et impossibles à falsifier.
Conclusion
La fluidité des mouvements de la PTZ 40X nécessite un véritable micro-pas, une accélération en courbe S, l'évitement de la résonance et l'amortissement mécanique - en travaillant ensemble, et non de manière isolée.
1. Ondulation du couple dans les moteurs pas à pas et réduction du micro-pas. ︎ 2. Profilage du courant sinusoïdal pour les circuits intégrés de commande de moteurs pas à pas. ︎ 3. Zones de résonance des moteurs pas à pas et techniques pour les éviter. ︎ 4. Profil de mouvement en courbe S pour la réduction des chocs mécaniques. ︎ 5. TI DRV8825 stepper driver microstepping specifications. ︎ 6. Manche TMC2209 SilentStep pour une commande de moteur sans vibration. ︎ 7. Conception d'un train d'engrenages anti-recul pour les mécanismes PTZ. ︎ 8. Sélection d'un amortisseur rotatif en silicone pour l'amortissement de l'arbre du moteur. ︎ 9. Couplage de la vitesse du zoom pour la commande du joystick PTZ au téléobjectif. ︎ 10. Rétroaction du codeur en boucle fermée pour la détection de la perte de pas. ︎