
Ich habe einmal eine 40X-PTZ-Demo gesehen, bei der das Bild wie bei einer Diashow von Bild zu Bild sprang. In diesem Moment wurde mir klar, dass eine flüssige Bewegung alles ist.
Schrittmotoren beseitigen das “gestufte” Aussehen bei 40-fachem Zoom durch den Einsatz von Mikroschritt-Technologie, die jeden physischen Schritt in 256 oder mehr Unterteilungen aufteilt, kombiniert mit S-Kurven-Beschleunigungsprofilen und Closed-Loop-Encoder-Feedback. Diese Techniken verwandeln ruckartige, sichtbare Sprünge in fließende, kontinuierliche Kamerabewegungen, die selbst im kleinsten Telebereich natürlich aussehen.
 PTZ-Kamera mit Schrittmotor und gleichmäßiger Bewegung bei 40fachem Zoom
PTZ-Kamera mit Schrittmotor und gleichmäßiger Bewegung bei 40fachem Zoom
Bei Loyalty-Secu bauen wir jeden Tag 38X und 40X PTZ-Kameras. Wir haben Jahre damit verbracht, Motortreiber, Getriebeübersetzungen und Firmware zu optimieren, um genau dieses Problem zu lösen. Im Folgenden gehe ich auf die vier häufigsten Fragen ein, die unsere Kunden zur Leistung von Schrittmotoren bei hohem Zoom stellen. Jede Antwort geht tief in die Technik, damit Sie bessere Spezifikationen schreiben und bessere Lieferanten auswählen können.
Inhaltsübersicht
Verwendet Ihre Kamera die Micro-Stepping-Technologie für ultrasanfte langsame Schwenks?
Ich habe zu viele PTZ-Kameras gesehen, die auf dem Datenblatt “sanfte Schwenks” anpreisen, aber bei 30X und mehr sichtbare Ruckler liefern. Die Kluft zwischen Marketing und Realität ist riesig.
Ja, unsere Kameras verwenden echtes Mikroschrittverfahren mit Sinuswellen-Stromsteuerung bei einer Unterteilung von 1/128 oder 1/256. Dadurch wird ein Standard-Vollschritt von 1,8° in Tausende von winzigen Teilschritten unterteilt, so dass sich der Schwenkkopf in einer nahezu kontinuierlichen Drehung bewegt, anstatt von einer Position zur nächsten zu springen.
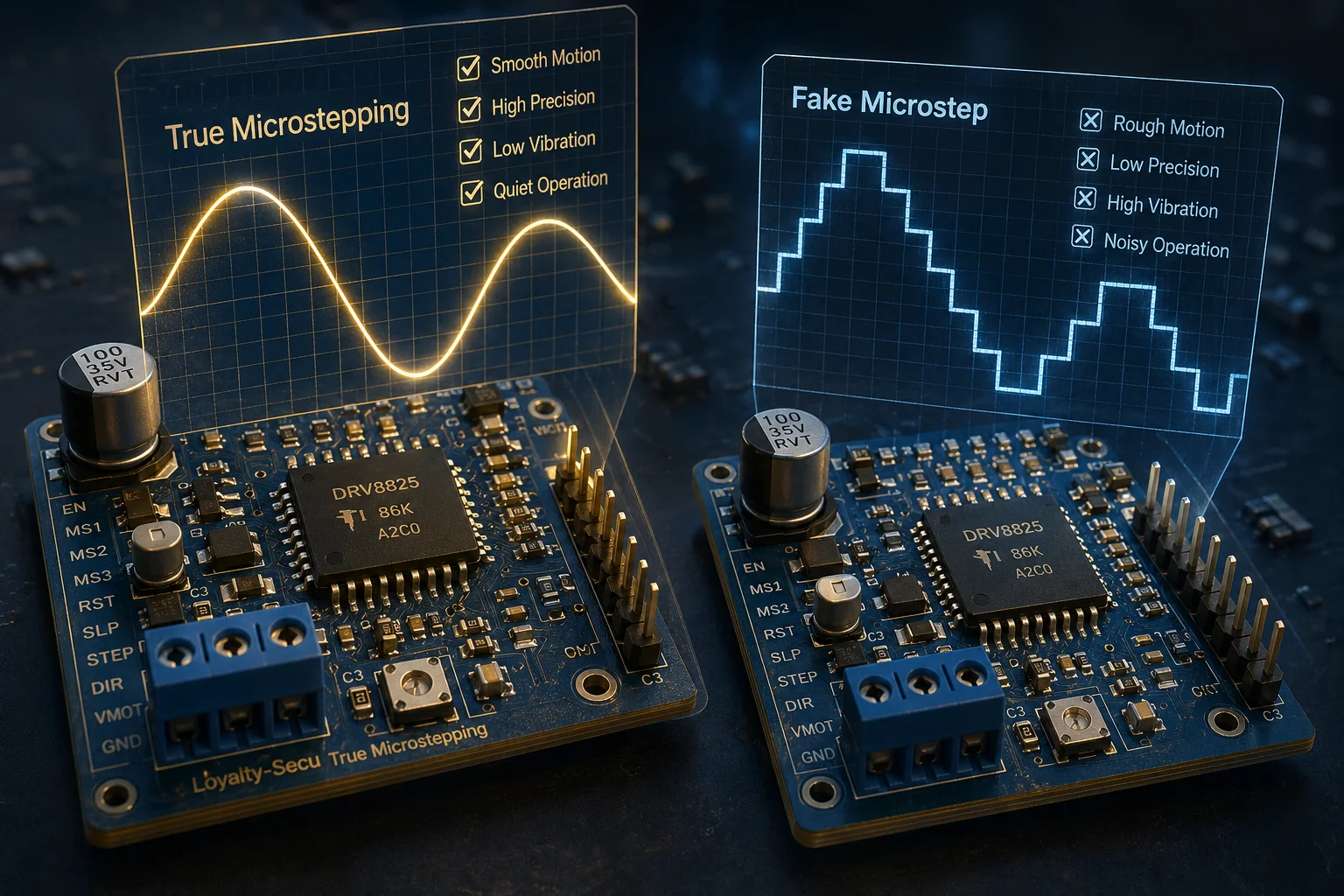 PTZ-Mikroschritt-Motortreiber mit Sinuswellen-Stromregelung
PTZ-Mikroschritt-Motortreiber mit Sinuswellen-Stromregelung
Warum Full-Step Driving bei 40X scheitert
Ein Standard-Zwei-Phasen-Schrittmotor hat einen Schrittwinkel von 1,8°. Das bedeutet 200 Schritte pro voller Umdrehung. Wenn Ihr Übersetzungsverhältnis 1:10 ist, beträgt jeder Schritt 0,18°. Das klingt klein. Aber bei einem 40-fachen Zoom ist das Sichtfeld extrem schmal - oft weniger als 2°. Ein einziger Sprung von 0,18° verschiebt das Bild also um etwa 9% des gesamten Bildes. Der Betrachter sieht einen harten, sichtbaren Knick.
Vergleichen Sie das mit 1/256 Mikroschritten. Jeder Ausgabeschritt entspricht 0,18° ÷ 256 = 0,000703°. Das ist so wenig, dass selbst bei 40facher Vergrößerung die Bildverschiebung pro Schritt für das menschliche Auge unsichtbar ist.
Echtes vs. unechtes Microstepping
Mikroschritt ist nicht gleich Mikroschritt. Billige Treiber ändern nur die Zahl in einem Register, formen aber nicht wirklich die aktuelle Wellenform. Das Ergebnis ist das, was Ingenieure “falsche Unterteilung” nennen. Der Motor vibriert und springt immer noch, weil der Strom in jeder Spule nicht einer sauberen Sinuskurve folgt.
Echter Mikroschritt erfordert:
- Sinusförmiges Stromprofiling auf beiden Phasen (Phase A = sin, Phase B = cos).
- Hochauflösende Strommessung so dass der Fahrer jede Mikroposition genau halten kann.
- Geräuscharmes PCB-Layout um zu verhindern, dass elektrische Störungen die Wellenform verzerren.
| Merkmal | Billiger Treiber (Fake Microstep) | Qualitätstreiber (True Microstep) |
|---|---|---|
| Umgebung der Unterteilung | 1/16 oder 1/32 auf Papier | 1/128 oder 1/256 geprüft |
| Aktuelle Wellenform | Raue Treppe | Glatte Sinuswelle |
| Vibration bei niedriger Geschwindigkeit | Hohes, hörbares Brummen | Sehr leise, fast lautlos |
| Bildqualität bei 40fachem Schwenk | Sichtbares Stottern | Sanftes, kontinuierliches Gleiten |
| Typische Chip-Beispiele | Generische chinesische Klone | TI DRV8825, TMC2209/5160 |
Was Sie Ihren Lieferanten fragen sollten
Wenn Sie eine PTZ von einem beliebigen Hersteller bewerten, sollten Sie zwei Dinge beachten:
- Ein Zeitlupenvideo, das mit maximalem optischen Zoom aufgenommen wurde. Geben Sie es Bild für Bild wieder. Wenn Sie diskrete Sprünge sehen, funktioniert das Microstepping nicht richtig.
- Das Modell des Treiberchips und das tatsächliche Unterteilungsverhältnis. Ein seriöser Hersteller wird dies ohne zu zögern mitteilen.
Bei Loyalty-Secu stellen wir diese Testvideos als Teil unseres Standard-Musterbewertungsverfahrens zur Verfügung. Wir sind der Meinung, dass ein Motor, der einen Videotest nicht übersteht, nicht ausgeliefert werden sollte.
Warum sieht das Bild bei billigen PTZs “ruckelig” aus, wenn man eine entfernte Person verfolgt?
Ich hatte einen Kunden in Kanada, der 50 preiswerte PTZ-Einheiten für ein Pipeline-Projekt kaufte. Bei vollem Zoom sah die automatische Verfolgung so aus, als ob die Kamera einen Anfall hätte. Er ersetzte alle 50 innerhalb von sechs Monaten.
Das ruckelige Aussehen kommt von drei kombinierten Problemen: grobe Schrittauflösung, die zu sichtbaren Sprüngen führt, mechanische Resonanz, die die Vibrationen bei bestimmten Geschwindigkeiten verstärkt, und abrupte Start-Stopp-Befehle, die die Objektivbaugruppe zum Wackeln bringen. Bei billigen PTZs wird in allen drei Bereichen gespart, sodass sich das Problem bei langen Brennweiten vervielfacht.
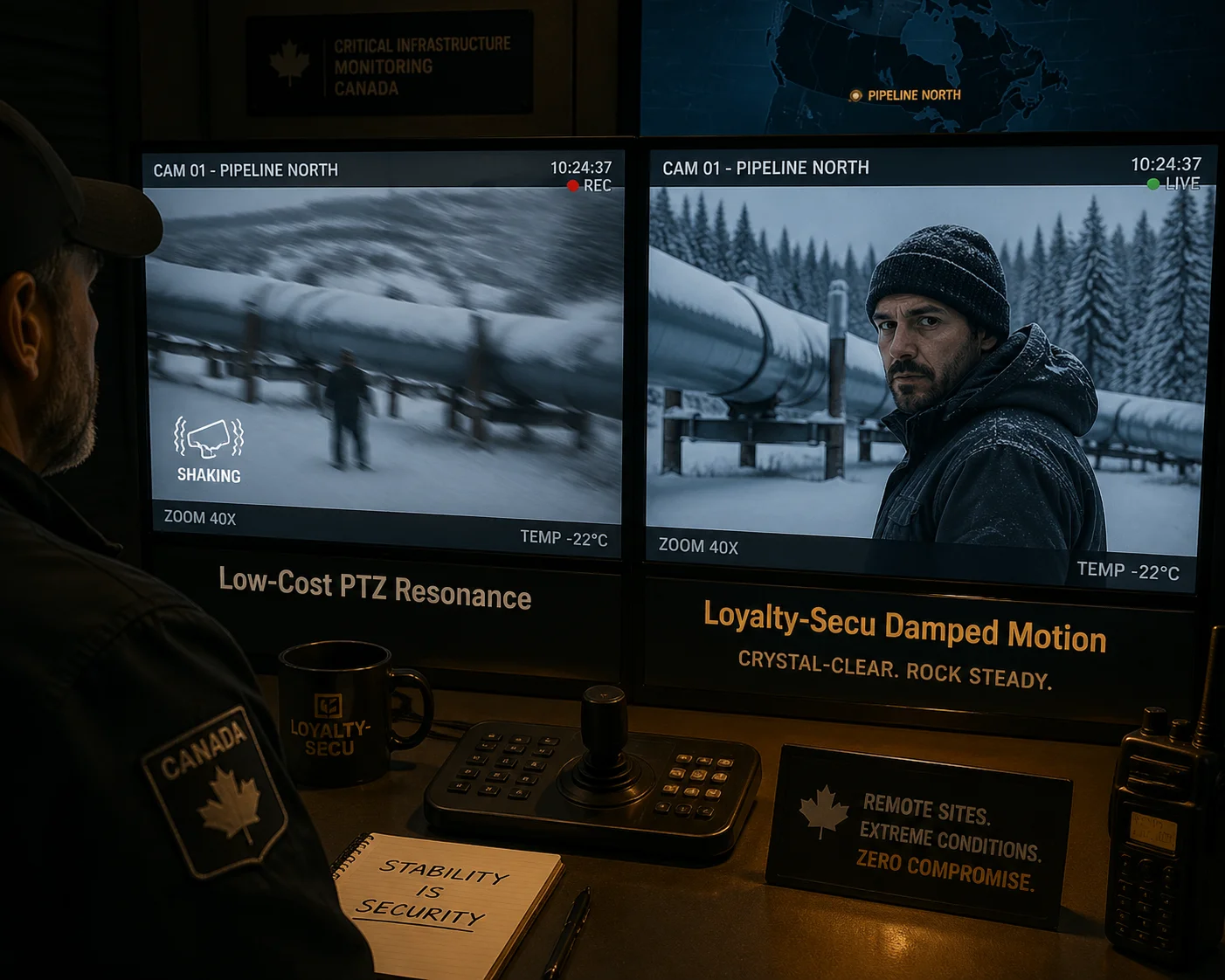 Vergleich zwischen ruckeligem PTZ-Bild und glattem PTZ-Bild bei hohem Zoom
Vergleich zwischen ruckeligem PTZ-Bild und glattem PTZ-Bild bei hohem Zoom
Problem 1: Grobschrittige Auflösung
Wie ich oben erklärt habe, erzeugt ein Vollschritt- oder Halbschritt-Treiber bei 40fachem Zoom deutlich sichtbare Bildsprünge. Aber billige PTZs gehen sogar noch weiter in die falsche Richtung. Sie verwenden oft Motoren mit einem Schrittwinkel von 7,5° (nur 48 Schritte pro Umdrehung), weil diese Motoren weniger kosten. Selbst mit 1/16-Mikroschritten ist jeder Ausgangsschritt immer noch viel zu groß für die Arbeit mit Teleobjektiven.
Problem 2: Resonanzzonen
Jeder Schrittmotor hat natürliche Resonanzfrequenzen. Wenn die Motordrehzahl mit einer dieser Frequenzen übereinstimmt, steigen die Vibrationen drastisch an. Bei einer billigen PTZ kennt die Firmware diese Zonen nicht. Sie lässt den Motor einfach mit der Geschwindigkeit laufen, die der Joystick vorgibt. Wenn diese Geschwindigkeit zufällig in eine Resonanzzone fällt, wackelt die ganze Kamera.
Gute Firmware erkennt die Resonanzzonen während der Werkskalibrierung und überspringt sie entweder schnell oder vermeidet sie ganz.
Problem 3: Schwerer Start und schwerer Stopp
Ein billiges Steuergerät sendet einen Rechteck-Drehzahlbefehl: sofort von Null auf die Zielgeschwindigkeit, dann sofort von der Zielgeschwindigkeit auf Null. Dies erzeugt eine Drehmomentspitze an beiden Enden. Der Kamerakopf schlingert nach vorne, schießt über das Ziel hinaus und prallt dann wieder zurück. Bei 40-facher Vergrößerung führt dieser Rückprall zu einem heftigen Verwackeln des Bildes, das eine ganze Sekunde dauern kann, um sich zu beruhigen.
Wie Qualitäts-PTZs alle drei Probleme lösen
| Problem | Günstiger PTZ-Ansatz | Qualität PTZ-Ansatz |
|---|---|---|
| Schrittweise Auflösung | 7,5° Motor, 1/8 Mikroschritt | 0,9° Motor, 1/128+ Mikroschritt |
| Resonanz | Keine Resonanzkartierung | Firmware überspringt Resonanzzonen |
| Start/Stopp | Rechteckiger Befehl | S-Kurve oder trapezförmige Rampe |
| Dämpfung | Kein mechanischer Dämpfer | Trägheitsscheibe oder Silikondämpfer auf der Welle |
| Zahnradgetriebe | Kunststoffzahnräder mit Flankenspiel | Metallzahnräder mit spielfreier Feder |
Die wahren Kosten von “billig”
Mein Kunde in Kanada hat das auf die harte Tour gelernt. Die 50 billigen Geräte kosteten ihn $8.000 im Voraus. Aber die Ersatzgeräte, die Arbeit, um sie an abgelegenen Pipeline-Masten auszutauschen, und die verlorene Glaubwürdigkeit des Vertrags kosteten ihn über $40.000. Wenn Sie PTZ-Kameras für ernsthafte Projekte kaufen, ist das Motorsystem nicht der richtige Ort, um Geld zu sparen.
Kann ich die Schwenk-/Neigegeschwindigkeit dynamisch an meine aktuelle Zoomstufe anpassen?
Diese Frage bekomme ich auf fast jeder Messe gestellt. Die Antwort überrascht viele, denn die meisten PTZ-Kameras haben diese Funktion bereits - sie sind nur schlecht implementiert.
Ja, professionelle PTZ-Kameras können und sollten die Schwenk-/Neigegeschwindigkeit automatisch an die aktuelle Zoomstufe koppeln. Diese Funktion wird als “proportionales Schwenken” oder “Kopplung der Zoomgeschwindigkeit” bezeichnet. Wenn der Zoom erhöht wird, reduziert die Firmware die maximale Schwenk- und Neigegeschwindigkeit, so dass sich das Bild in einer angenehmen, überschaubaren Geschwindigkeit auf dem Bildschirm bewegt.
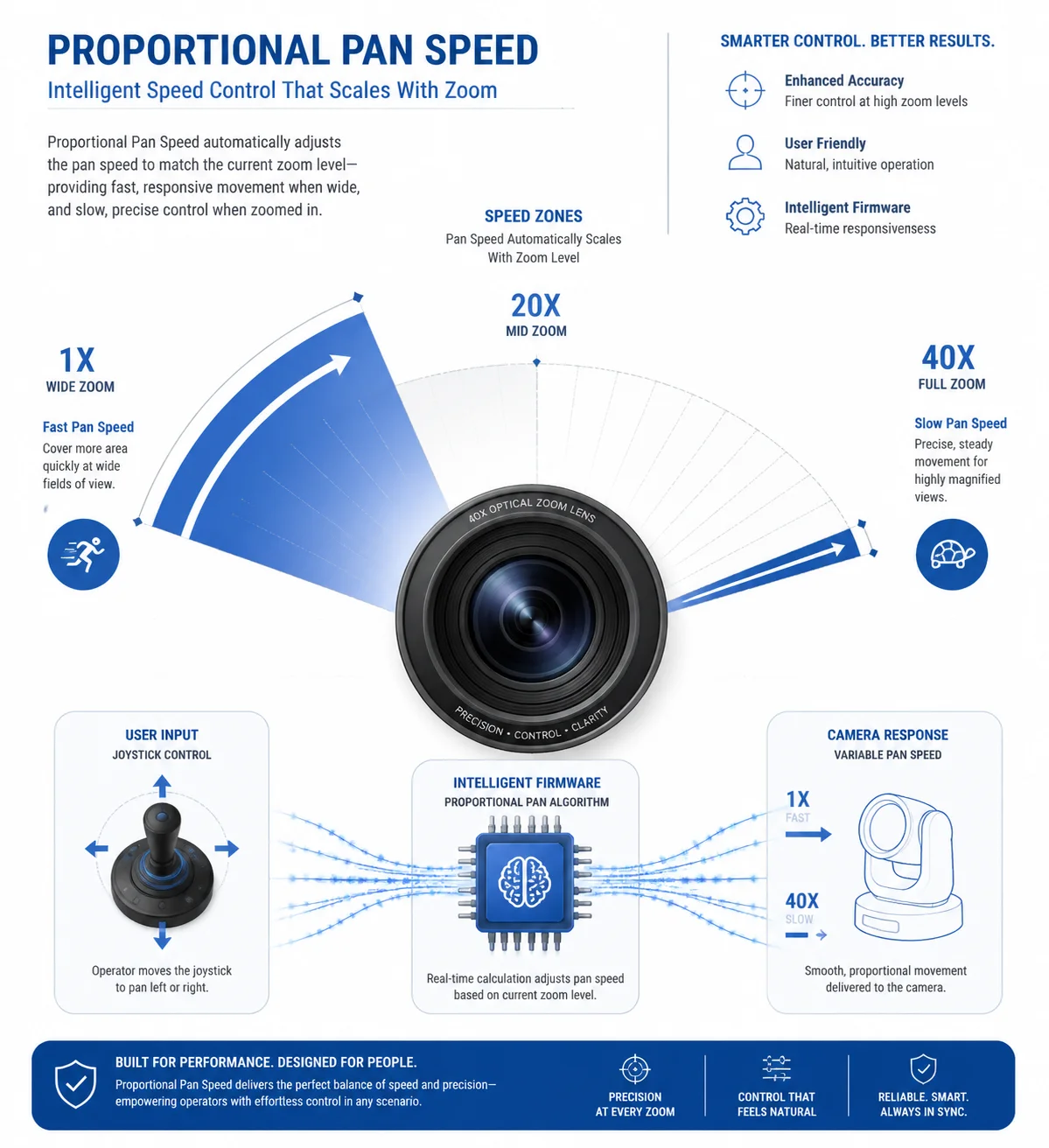 Proportionale PTZ-Schwenkgeschwindigkeit in Verbindung mit dem Zoomstufen-Diagramm
Proportionale PTZ-Schwenkgeschwindigkeit in Verbindung mit dem Zoomstufen-Diagramm
Warum dies bei 40X von Bedeutung ist
Bei einem 1-fachen Weitwinkel fühlt sich eine Schwenkgeschwindigkeit von 100°/s normal an. Die Szene gleitet in einem angenehmen Tempo über den Bildschirm. Bei einer 40-fachen Vergrößerung würde die gleiche Geschwindigkeit von 100°/s das Bild zu einem unlesbaren Streifen verschwimmen lassen. Das Sichtfeld ist 40-mal kleiner, so dass sich das Bild mit jedem Grad der Drehung 40-mal weiter auf dem Bildschirm bewegt.
Um die Bewegungsgeschwindigkeit auf dem Bildschirm konstant zu halten, muss die Schwenkgeschwindigkeit um einen Faktor abnehmen, der ungefähr proportional zum Zoomfaktor ist. Bei 40X bedeutet dies, dass die maximale Schwenkgeschwindigkeit etwa 2,5°/s oder weniger betragen sollte.
Wie die Firmware damit umgeht
Der Zoom-Motor meldet seine aktuelle Position an die Hauptsteuerung. Die Steuerung sucht in einer Geschwindigkeitsbegrenzungstabelle nach, die jeder Zoomposition eine maximal zulässige Schwenk-/Neigegeschwindigkeit zuordnet. Wenn der Bediener den Joystick betätigt, begrenzt die Steuerung die Motorgeschwindigkeit auf den Wert aus der Tabelle.
Das Konzept der Geschwindigkeitsbegrenzungstabelle
Hier ist ein vereinfachtes Beispiel dafür, wie diese Tabelle in der Firmware aussieht:
| Zoomstufe | Sichtfeld (Horizontal) | Maximale Schwenkgeschwindigkeit | Maximale Neigegeschwindigkeit |
|---|---|---|---|
| 1X | 58° | 120°/s | 90°/s |
| 10X | 5.8° | 12°/s | 9°/s |
| 20X | 2.9° | 6°/s | 4.5°/s |
| 30X | 1.9° | 4°/s | 3°/s |
| 40X | 1.45° | 2.5°/s | 2°/s |
Was passiert ohne Zoom-Speed-Kupplung?
Ohne diese Funktion muss der Bediener die Joystick-Eingabe bei hohem Zoom manuell reduzieren. Das ist anstrengend und ungenau. Die meisten Bediener schießen über das Ziel hinaus und korrigieren dann zu stark, wodurch ein Hin- und Herschwanken entsteht, das auf dem aufgezeichneten Filmmaterial unprofessionell aussieht.
Einen Schritt weiter gehen: Adaptive Beschleunigung
Bei Loyalty-Secu begrenzt unsere Firmware nicht nur die Geschwindigkeit. Sie passt auch die Beschleunigungskurve je nach Zoomstufe an. Bei 40X ist die S-Kurven-Rampenzeit länger, so dass die Kamera sanfter in die Bewegung übergeht. Bei 1X ist die Rampe kürzer und die Kamera reagiert schneller. Diese doppelte Anpassung - Geschwindigkeitsbegrenzung und Beschleunigungskurve - gibt dem Bediener ein einheitliches Gefühl für jede Zoomstufe.
Wenn Sie eine Spezifikation für Ihren nächsten PTZ-Kauf schreiben, sollten Sie diese Zeile aufnehmen: “Die Schwenk-/Neigegeschwindigkeit skaliert automatisch im umgekehrten Verhältnis zum optischen Zoomverhältnis, wobei die S-Kurven-Beschleunigung pro Zoomstufe angepasst wird.” Dieser einzige Satz wird die meisten Billigprodukte herausfiltern.
Wie minimiert der Motortreiber Vibrationen beim engsten Teleobjektivwinkel?
Im Jahr 2022 habe ich drei Monate lang mit unserem Firmware-Team daran gearbeitet, eine subtile 2-Pixel-Vibration zu beseitigen, die nur bei 38X und höher auftrat. Es stellte sich heraus, dass es sich um ein Resonanzproblem bei einer ganz bestimmten Schwenkgeschwindigkeit handelte. Durch die Behebung dieses Problems habe ich eine Menge gelernt.
Der Motortreiber minimiert die Vibrationen bei maximalem Teleobjektiv, indem er Mikroschrittbetrieb mit hoher Unterteilung mit aktiver Resonanzvermeidung, S-Kurven-Bewegungsprofilen und mechanischer Dämpfung kombiniert. Zusammen reduzieren diese Methoden die Drehmomentwelligkeit und verhindern, dass der Motor bei Geschwindigkeiten verweilt, bei denen seine Eigenfrequenz Schwingungen verursacht.
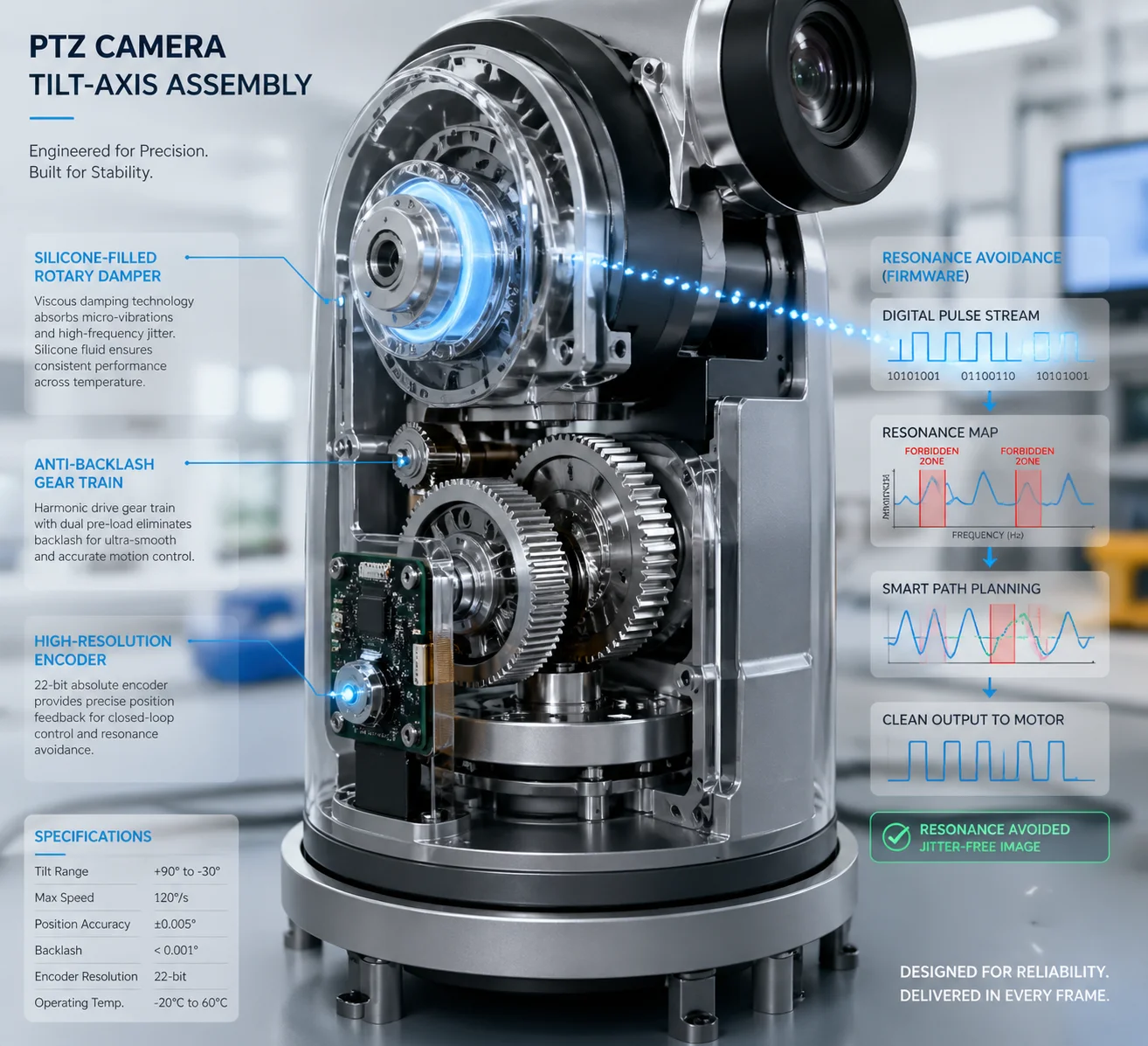 Schrittmotor-Schwingungsdämpfungssystem für PTZ-Kamera
Schrittmotor-Schwingungsdämpfungssystem für PTZ-Kamera
Verstehen der Drehmomentwelligkeit
Jeder Schrittmotor erzeugt eine kleine Schwankung des Drehmoments, wenn er sich von einem Schritt zum nächsten bewegt. Dies wird als Drehmomentwelligkeit 1. Bei niedrigem Zoom ist diese Welligkeit nicht sichtbar, da das Sichtfeld groß ist. Aber bei 40facher Vergrößerung führt selbst eine 0,001°-Schwingung zu einem sichtbaren Pixelzittern auf dem Bildschirm.
Mikroschrittbetrieb reduziert die Drehmomentwelligkeit, da die Stromübergänge zwischen den Schritten allmählich und nicht abrupt erfolgen. Ein 1/256 Mikroschritt-Treiber erzeugt eine Drehmomentwelligkeit, die etwa 1/256 der Vollschrittwelligkeit beträgt. Das ist in der Regel klein genug, um selbst bei 40facher Vergrößerung unsichtbar zu sein.
Aktive Resonanzvermeidung
Schrittmotoren haben zwei Hauptresonanzzonen:
- Resonanz bei niedriger Geschwindigkeit - typischerweise etwa 1-3 Umdrehungen pro Sekunde bei kleinen Motoren. Dies ist der gefährlichste Bereich für PTZ-Kameras, da langsame Schwenks bei hohem Zoom oft genau in diesen Bereich fallen.
- Instabilität im mittleren Bereich - einen breiteren Bereich, in dem der Motor die Synchronisation verlieren kann.
Unsere Firmware misst während der Entwicklung das Resonanzprofil eines jeden Motormodells. Dann programmiert sie “verbotene Zonen” in den Drehzahlregler. Wenn die Zielgeschwindigkeit in eine verbotene Zone fällt, springt der Regler beim Beschleunigen entweder schnell hindurch oder schaltet auf eine nahe gelegene sichere Geschwindigkeit um.
Mechanische Dämpfung Details
Selbst bei perfekter elektrischer Steuerung gelangt immer noch ein Teil der Vibrationsenergie über die Motorwelle in das Kameragehäuse. Um diese Energie zu absorbieren, verwenden wir:
- Silikongefüllte Rotationsdämpfer auf der Motorausgangswelle. Diese wandeln Schwingungsenergie in Wärme um.
- Spielfreie Getriebezüge die die Zahnräder in ständigem Kontakt halten und das “Klirren” verhindern, das entsteht, wenn die Gänge die Richtung wechseln.
- Ausbalancierte Linsenbaugruppen so dass der Schwerpunkt auf der Drehachse liegt. Eine außermittige Last erzeugt einmal pro Umdrehung eine periodische Drehmomentstörung.
Die Firmware-Schicht: Das Ganze zusammenfügen
Die letzte Ebene ist die Firmware für die Bewegungssteuerung. Sie übernimmt die Joystick-Eingabe (oder den Auto-Tracking-Befehl), wendet die zoom-proportionale Geschwindigkeitsbegrenzung an, erzeugt ein S-Kurven-Geschwindigkeitsprofil, prüft auf Resonanzzonen-Konflikte und gibt dann einen Strom präzise getakteter Mikroschritt-Impulse an den Treiber-Chip weiter.
Diese gesamte Berechnung erfolgt in Echtzeit, tausende Male pro Sekunde. Das Ergebnis ist eine so gleichmäßige Bewegung, dass der Betrachter vergisst, dass die Kamera auf einer mechanischen Plattform steht. Das Bild gleitet einfach dahin.
Was Sie beim Importieren angeben müssen
Wenn Sie PTZ-Kameras aus China beziehen und eine garantiert reibungslose Leistung bei 40X benötigen, sollten Sie diese Punkte in Ihr technisches Anforderungsdokument aufnehmen:
- Minimaler äquivalenter Ausgangsschrittwinkel ≤ 0,003° (Motorschrittwinkel × Mikroschrittverhältnis × Getriebeübersetzung).
- Der Treiber muss eine sinusförmige Stromregelung mit ≥ 1/32 verifizierten Mikroschritten verwenden.
- Die Firmware muss eine S-Kurven-Beschleunigung mit Resonanzzonenvermeidung implementieren.
- Der Lieferant muss im Rahmen der Musterfreigabe ein Zeitlupen-Testvideo mit maximalem optischen Zoom vorlegen.
- Der Lieferant muss ein Video mit 0,02° Punkt-zu-Punkt-Bewegungstest vorlegen, um die Gleichmäßigkeit der einzelnen Schritte zu überprüfen.
Diese fünf Zeilen werden Sie vor einer Katastrophe bewahren, wie sie meinem kanadischen Kunden widerfahren ist. Sie sind einfach zu überprüfen und unmöglich zu fälschen.
Schlussfolgerung
Eine reibungslose 40-fache PTZ-Bewegung erfordert echtes Mikroschrittverhalten, S-Kurven-Beschleunigung, Resonanzvermeidung und mechanische Dämpfung - und zwar im Zusammenspiel und nicht isoliert.
1. Drehmomentrippel in Schrittmotoren und Mikroschrittreduzierung. ︎ 2. Sinuswellen-Stromprofilierung für Schrittmotor-Treiber-ICs. ︎ 3. Schrittmotor-Resonanzzonen und Techniken zur Vermeidung von Resonanzen. ︎ 4. S-Kurven-Bewegungsprofil zur mechanischen Stoßdämpfung. ︎ 5. TI DRV8825 Schrittschalttreiber Microstepping Spezifikationen. ︎ 6. TMC2209 SilentStep Stick für vibrationsfreie Motorsteuerung. ︎ 7. Spielfreie Getriebekonstruktion für PTZ-Mechanismen. ︎ 8. Auswahl des Silizium-Drehdämpfers zur Dämpfung der Motorwelle. ︎ 9. Zoom-Speed-Kopplung für PTZ-Joystick-Steuerung bei Teleaufnahmen. ︎ 10. Geberrückführung im geschlossenen Regelkreis zur Erkennung von Schrittverlusten. ︎