
Una volta ho assistito a una demo di un PTZ 40X in cui l'immagine saltava di fotogramma in fotogramma come in una presentazione. Quel momento mi ha fatto capire che la fluidità del movimento è tutto.
I motori passo-passo eliminano l'aspetto “a gradini” dello zoom 40X utilizzando la tecnologia microstepping che suddivide ogni passo fisico in 256 o più suddivisioni, combinata con profili di accelerazione a curva S e feedback dell'encoder ad anello chiuso. L'insieme di queste tecniche trasforma i salti visibili a scatti in un movimento fluido e continuo della telecamera, che appare naturale anche con il teleobiettivo più stretto.
 Movimento fluido del motore passo-passo della telecamera PTZ con zoom 40X
Movimento fluido del motore passo-passo della telecamera PTZ con zoom 40X
In Loyalty-Secu costruiamo ogni giorno telecamere PTZ 38X e 40X. Abbiamo trascorso anni a mettere a punto i driver dei motori, i rapporti di trasmissione e il firmware per risolvere esattamente questo problema. Di seguito, vi illustrerò le quattro domande più comuni che i nostri clienti ci pongono sulle prestazioni dei motori passo-passo con zoom elevato. Ogni risposta approfondisce l'aspetto ingegneristico, in modo che possiate scrivere specifiche migliori e scegliere fornitori migliori.
Indice dei contenuti
La vostra fotocamera utilizza la tecnologia Micro-Stepping per una scansione lenta e ultra scorrevole?
Ho visto troppe telecamere PTZ che dichiarano una “panoramica fluida” sulla scheda tecnica, ma che producono uno stuttering visibile a 30X e oltre. Il divario tra marketing e realtà è enorme.
Sì, le nostre telecamere utilizzano un vero microstepping con controllo della corrente sinusoidale a 1/128 o 1/256 di suddivisione. In questo modo il passo completo standard di 1,8° viene suddiviso in migliaia di piccoli sottopassi, in modo che la testa di panoramica si muova con una rotazione quasi continua invece di saltare da una posizione all'altra.
 Controllo della corrente sinusoidale del driver del motore microstepping PTZ
Controllo della corrente sinusoidale del driver del motore microstepping PTZ
Perché la guida a passo pieno fallisce a 40X
Un motore passo-passo bifase standard ha un angolo di passo di 1,8°. Ciò significa 200 passi per giro completo. Se il rapporto di trasmissione è 1:10, ogni passo di uscita è di 0,18°. Sembra poco. Ma con uno zoom 40X, il campo visivo è estremamente ridotto, spesso inferiore a 2°. Quindi un singolo salto di 0,18° sposta l'immagine di circa 9% dell'intero fotogramma. L'osservatore vede uno scatto netto e visibile.
Confrontatelo ora con un microstepping di 1/256. Ogni passo di uscita diventa 0,18° ÷ 256 = 0,000703°. È un valore così piccolo che, anche a 40X, lo spostamento dell'immagine per ogni passo è invisibile all'occhio umano.
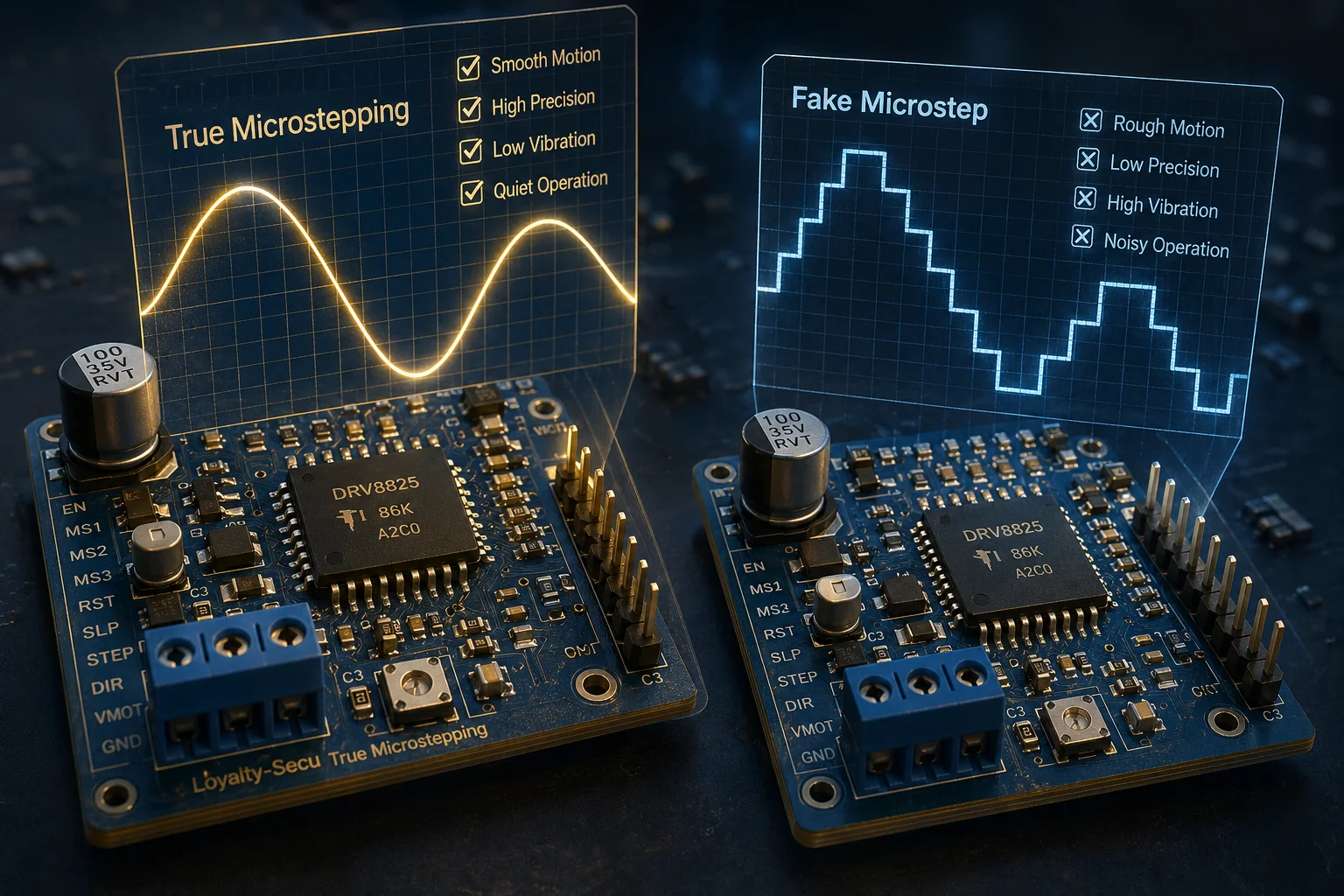
Microstepping vero e falso
Non tutti i microstepping sono uguali. I driver più economici si limitano a modificare il numero su un registro, ma non modellano effettivamente la forma d'onda corrente. Il risultato è quello che gli ingegneri chiamano “falsa suddivisione”. Il motore continua a vibrare e a saltare perché la corrente in ogni bobina non segue una curva sinusoidale pulita.
Il vero microstepping richiede:
- Profilazione della corrente sinusoidale su entrambe le fasi (fase A = sin, fase B = cos).
- Rilevamento della corrente ad alta risoluzione in modo che il driver possa mantenere con precisione ogni microposizione.
- Layout PCB a basso rumore per evitare che le interferenze elettriche distorcano la forma d'onda.
| Caratteristica | Autista economico (Microstep falso) | Driver di qualità (True Microstep) |
|---|---|---|
| Ambientazione della suddivisione | 1/16 o 1/32 su carta | 1/128 o 1/256 verificato |
| Forma d'onda della corrente | Scala grezza | Onda sinusoidale liscia |
| Vibrazioni a bassa velocità | Ronzio alto e udibile | Molto basso, quasi silenzioso |
| Qualità dell'immagine a 40X pan | Balbuzie visibile | Scorrimento fluido e continuo |
| Esempi tipici di chip | Cloni cinesi generici | TI DRV8825, TMC2209/5160 |
Cosa chiedere al fornitore
Quando valutate un PTZ di qualsiasi fabbrica, chiedete due cose:
- Un video slow-pan registrato con lo zoom ottico massimo. Riproducetelo fotogramma per fotogramma. Se si notano salti discreti, il microstepping non funziona correttamente.
- Il modello di chip driver e il rapporto di suddivisione effettivo. Una fabbrica affidabile lo condividerà senza esitazione.
Noi di Loyalty-Secu forniamo questi video di prova come parte del nostro processo di valutazione standard dei campioni. Riteniamo che se le prestazioni del motore non sono in grado di superare un test video, non dovrebbero essere spedite.
Perché l'immagine appare “a scatti” sui PTZ economici quando si segue una persona distante?
Ho avuto un cliente in Canada che ha acquistato 50 unità PTZ economiche per un progetto di conduttura. Con lo zoom al massimo, l'inseguimento automatico sembrava che la telecamera avesse le convulsioni. Le ha sostituite tutte e 50 nel giro di sei mesi.
L'aspetto a scatti deriva da tre problemi combinati: la risoluzione grossolana dei passi che crea salti visibili, la risonanza meccanica che amplifica le vibrazioni a determinate velocità e i comandi bruschi di avvio e arresto che fanno tremare il gruppo dell'obiettivo. I PTZ economici riducono i costi in tutte e tre le aree, quindi il problema si moltiplica alle lunghezze focali.
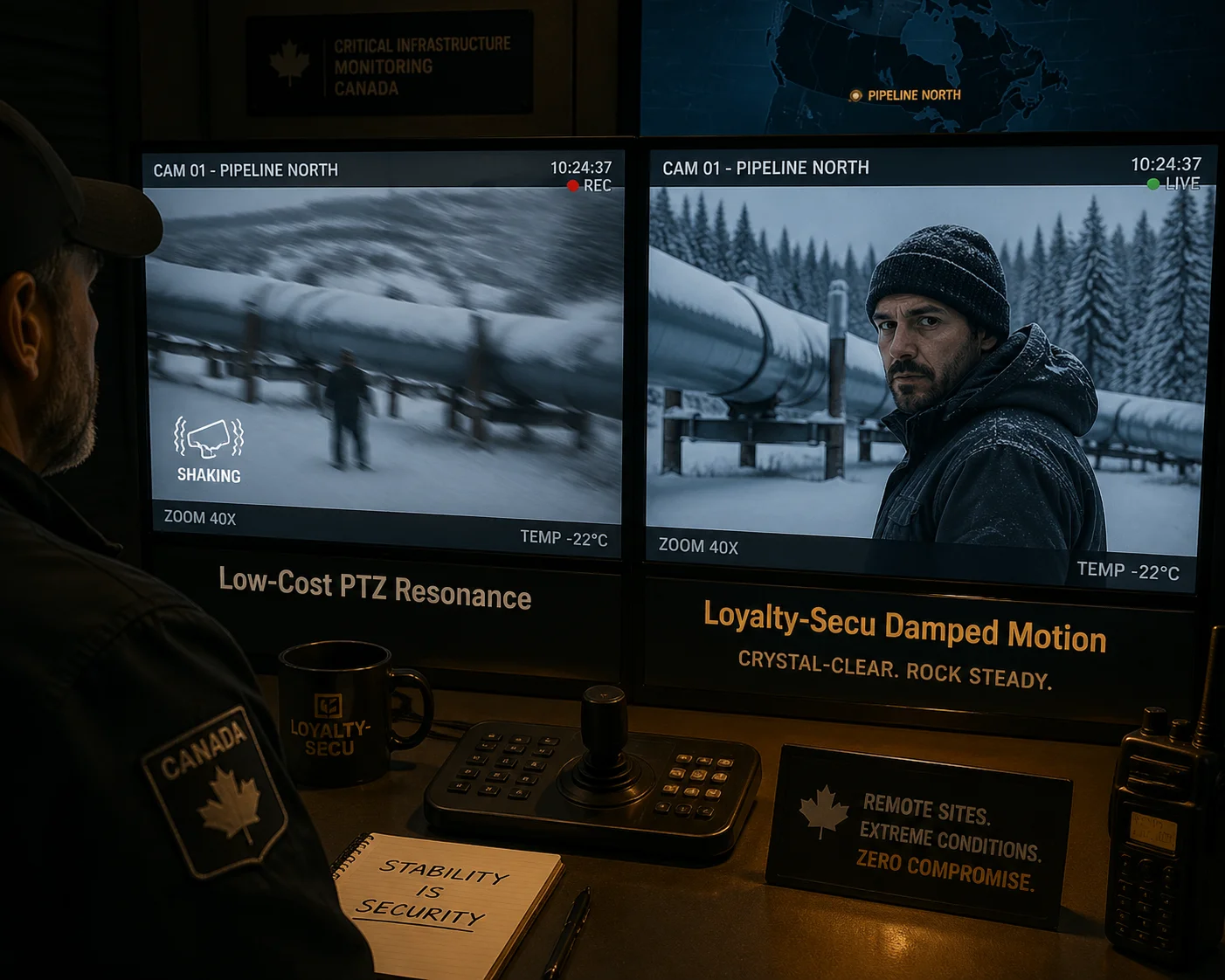 Confronto tra l'immagine PTZ a scatti e l'immagine PTZ liscia con zoom elevato
Confronto tra l'immagine PTZ a scatti e l'immagine PTZ liscia con zoom elevato
Problema 1: Risoluzione a passi grossolani
Come ho spiegato sopra, un driver full-step o half-step con uno zoom 40X produce salti di immagine chiaramente visibili. Ma i PTZ economici si spingono ancora più in là nella direzione sbagliata. Spesso utilizzano motori con angoli di passo di 7,5° (solo 48 passi per giro) perché costano meno. Anche con un microstepping di 1/16, ogni passo di uscita è ancora troppo grande per il lavoro con i teleobiettivi.
Problema 2: Zone di risonanza
Ogni motore passo-passo ha frequenze di risonanza naturali. Quando la velocità del motore corrisponde a una di queste frequenze, le vibrazioni aumentano drasticamente. In un PTZ economico, il firmware non conosce queste zone. Si limita a far girare il motore a qualsiasi velocità comandata dal joystick. Se la velocità si trova in una zona di risonanza, l'intera telecamera trema.
Un buon firmware individua le zone di risonanza durante la calibrazione di fabbrica e le supera rapidamente o le evita del tutto.
Problema 3: Avviamento e arresto bruschi
Un controller economico invia un comando di velocità a onda quadra: da zero alla velocità target istantaneamente, quindi dalla velocità target a zero istantaneamente. Questo crea un picco di coppia a entrambe le estremità. La testa della telecamera si sposta in avanti, esagera e poi rimbalza. A 40X, questo rimbalzo si traduce in un violento tremolio dell'immagine che può richiedere un intero secondo per stabilizzarsi.
Come i PTZ di qualità risolvono tutti e tre i problemi
| Problema | Approccio PTZ economico | Approccio PTZ di qualità |
|---|---|---|
| Risoluzione delle fasi | Motore a 7,5°, 1/8 micropasso | Motore 0,9°, 1/128+ micropasso |
| Risonanza | Nessuna mappatura della risonanza | Il firmware salta le zone di risonanza |
| Avvio/arresto | Comando a onda quadra | Curva ad S o rampa trapezoidale |
| Smorzamento | Nessuna serranda meccanica | Disco d'inerzia o smorzatore in silicone sull'albero |
| Treno di ingranaggi | Ingranaggi in plastica con gioco | Ingranaggi in metallo con molla antiritorno |
Il vero costo del “low cost”
Il mio cliente in Canada lo ha imparato a sue spese. Le 50 unità economiche gli sono costate $8.000 in anticipo. Ma le unità sostitutive, la manodopera per sostituirle sui pali remoti delle condutture e la perdita di credibilità del contratto gli sono costati oltre $40.000. Quando si acquistano telecamere PTZ per progetti seri, il sistema motore non è il posto giusto per risparmiare.
È possibile regolare la velocità di panoramica/inclinazione in modo dinamico in base al livello di zoom corrente?
Ricevo questa domanda quasi ad ogni fiera. La risposta sorprende molti, perché la maggior parte delle telecamere PTZ dispone già di questa funzione, solo che la implementano male.
Sì, le telecamere PTZ professionali possono e devono associare automaticamente la velocità di panoramica/inclinazione al livello di zoom corrente. Questa funzione è chiamata “panoramica proporzionale” o “accoppiamento della velocità dello zoom”. All'aumentare dello zoom, il firmware riduce la velocità massima di panoramica e inclinazione, in modo che l'immagine si muova a una velocità confortevole e guardabile sullo schermo.
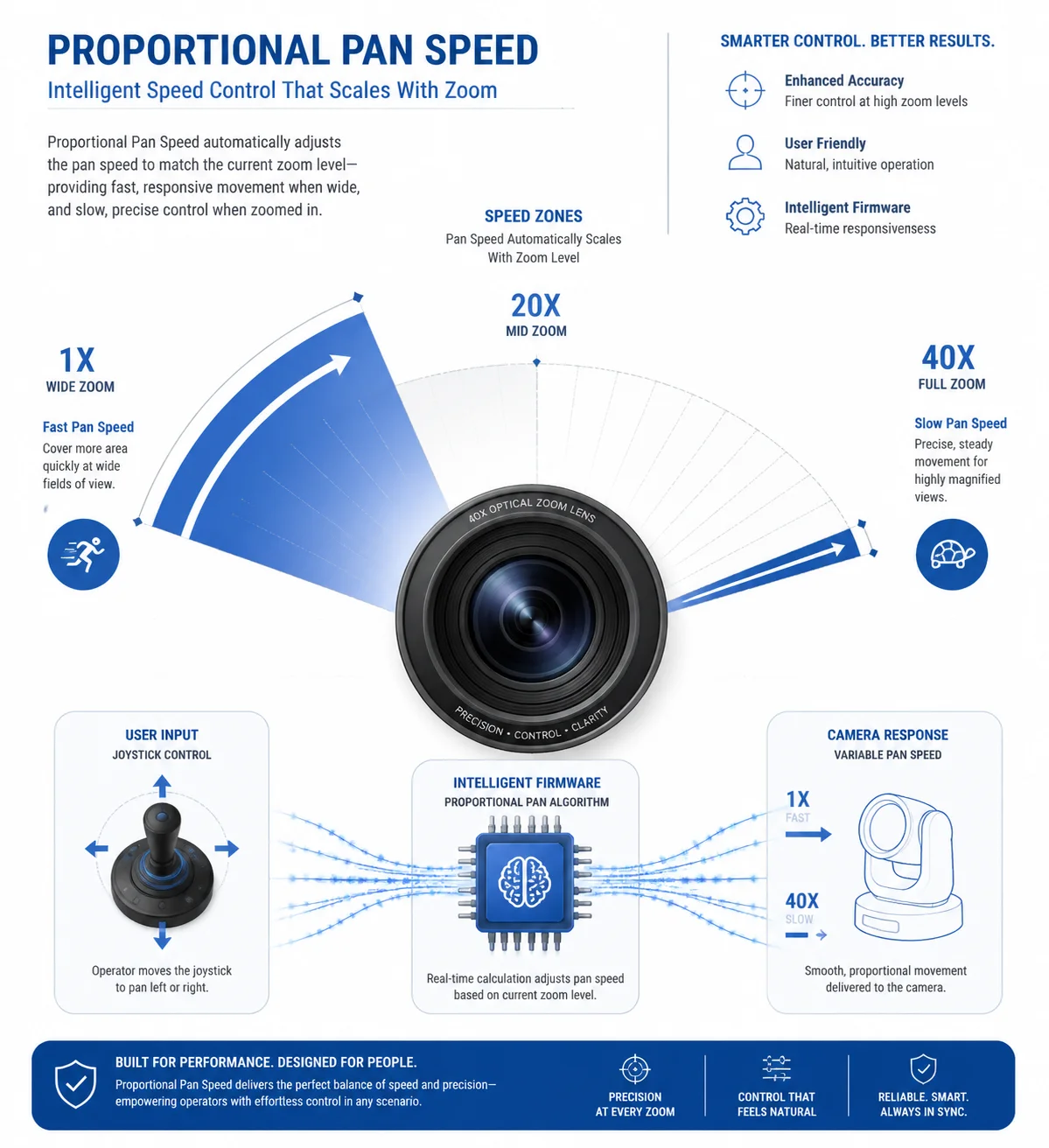 Velocità di panoramica proporzionale PTZ legata al diagramma del livello di zoom
Velocità di panoramica proporzionale PTZ legata al diagramma del livello di zoom
Perché è importante a 40X
Con un grandangolo 1X, una velocità di panoramica di 100°/s sembra normale. La scena scorre sullo schermo a un ritmo confortevole. Ma a 40X, gli stessi 100°/s renderebbero l'immagine sfocata in una striscia illeggibile. Il campo visivo è 40 volte più stretto, quindi ogni grado di rotazione sposta l'immagine di 40 volte sullo schermo.
Per mantenere costante la velocità di movimento sullo schermo, la velocità di panoramica deve diminuire di un fattore approssimativamente proporzionale al rapporto di zoom. A 40X, ciò significa che la velocità massima di panoramica deve essere di circa 2,5°/s o meno.
Come viene gestito il firmware
Il motore dello zoom segnala la sua posizione corrente al controllore principale. Il controllore consulta una tabella di limitazione della velocità che mappa ogni posizione dello zoom a una velocità massima consentita di panoramica/inclinazione. Quando l'operatore preme il joystick, il controller blocca la velocità del motore al valore indicato nella tabella.
Il concetto di tabella dei limiti di velocità
Ecco un esempio semplificato dell'aspetto di questa tabella all'interno del firmware:
| Livello di zoom | Campo visivo (orizzontale) | Velocità massima della pentola | Velocità massima di inclinazione |
|---|---|---|---|
| 1X | 58° | 120°/s | 90°/s |
| 10X | 5.8° | 12°/s | 9°/s |
| 20X | 2.9° | 6°/s | 4.5°/s |
| 30X | 1.9° | 4°/s | 3°/s |
| 40X | 1.45° | 2.5°/s | 2°/s |
Cosa succede senza l'accoppiamento Zoom-Speed
Senza questa funzione, l'operatore deve ridurre manualmente l'input del joystick in caso di zoom elevato. Questa operazione è faticosa e imprecisa. La maggior parte degli operatori supera il bersaglio e poi corregge in modo eccessivo, creando un'oscillazione avanti e indietro che appare poco professionale nei filmati registrati.
Un passo avanti: Accelerazione adattiva
In Loyalty-Secu, il nostro firmware non si limita a limitare la velocità. Regola anche la curva di accelerazione in base al livello di zoom. A 40X, il tempo di rampa della curva S è più lungo, in modo che la fotocamera si muova più delicatamente. A 1X, la rampa è più breve per una risposta rapida. Questa doppia regolazione - limite di velocità e forma dell'accelerazione - offre agli operatori una “sensazione” coerente a ogni livello di zoom.
Se state scrivendo una specifica per il vostro prossimo acquisto di PTZ, includete questa riga: “La velocità di panoramica/inclinazione deve scalare automaticamente in modo inversamente proporzionale al rapporto di zoom ottico, con accelerazione della curva a S regolata per livello di zoom”. Questa singola frase escluderà la maggior parte dei prodotti di fascia bassa.
In che modo il driver motore riduce al minimo le vibrazioni con il teleobiettivo più stretto?
Ho trascorso tre mesi nel 2022 lavorando con il nostro team del firmware per eliminare una sottile vibrazione di 2 pixel che compariva solo a 38X e oltre. Si è rivelato un problema di risonanza a una velocità di panoramica molto specifica. Risolverlo mi ha insegnato molto.
Il driver del motore riduce al minimo le vibrazioni al massimo teleobiettivo combinando il microstepping ad alta suddivisione con l'evitamento attivo della risonanza, i profili di movimento a curva S e lo smorzamento meccanico. Insieme, questi metodi riducono l'ondulazione della coppia e impediscono al motore di soffermarsi a velocità in cui la sua frequenza naturale causa oscillazioni.
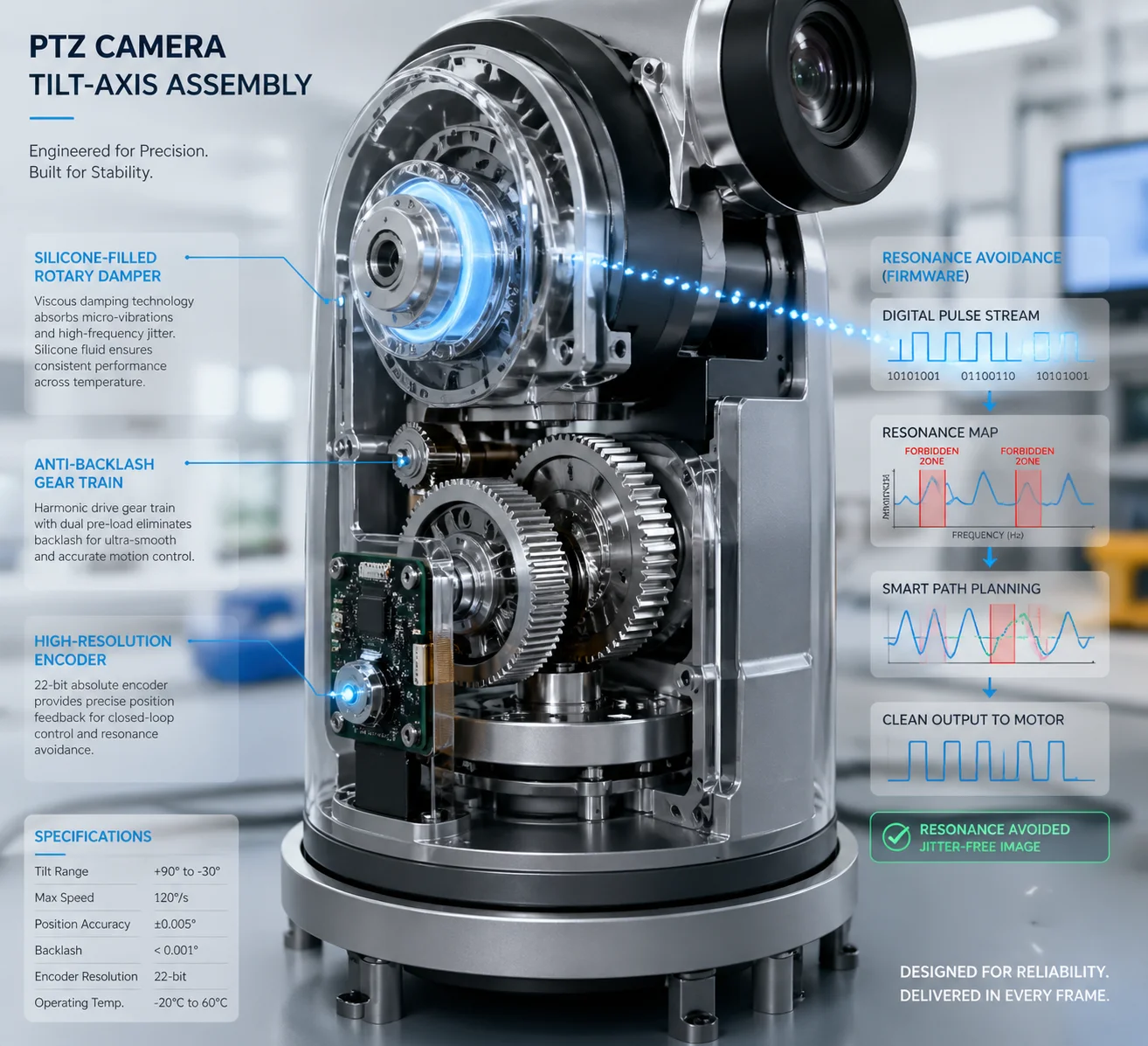 Sistema di smorzamento delle vibrazioni del motore passo-passo per telecamera PTZ
Sistema di smorzamento delle vibrazioni del motore passo-passo per telecamera PTZ
Comprendere l'ondulazione della coppia
Ogni motore passo-passo produce una piccola fluttuazione di coppia nel passaggio da un passo all'altro. Questa fluttuazione è chiamata ondulazione della coppia 1. A basso zoom, questa increspatura è invisibile perché il campo visivo è ampio. Ma a 40X, anche un'oscillazione di 0,001° si traduce in un jitter visibile dei pixel sullo schermo.
Il microstepping riduce il ripple di coppia perché le transizioni di corrente tra i passi sono graduali e non brusche. Un driver a 1/256 micropassi produce un'ondulazione di coppia pari a circa 1/256 dell'ondulazione a passo pieno. Di solito è abbastanza piccolo da essere invisibile anche a 40X.
Evitare la risonanza attiva
I motori passo-passo presentano due zone di risonanza principali:
- Risonanza a bassa velocità - in genere intorno a 1-3 giri/s per i motori piccoli. Questa è la zona più pericolosa per le telecamere PTZ, perché la panoramica lenta ad alto zoom spesso vi cade proprio.
- Instabilità di fascia media - una zona più ampia in cui il motore può perdere la sincronizzazione.
Il nostro firmware misura il profilo di risonanza di ciascun modello di motore durante lo sviluppo. Quindi programma le “zone proibite” nel regolatore di velocità. Quando la velocità target rientra in una zona proibita, il controllore la attraversa rapidamente durante l'accelerazione o passa a una velocità sicura vicina.
Dettagli sullo smorzamento meccanico
Anche con un controllo elettrico perfetto, una parte dell'energia di vibrazione raggiunge il corpo macchina attraverso l'albero motore. Per assorbire questa energia, utilizziamo:
- Smorzatori rotanti riempiti di silicone sull'albero di uscita del motore. Questi convertono l'energia delle vibrazioni in calore.
- Treni di ingranaggi a gioco ridotto che mantengono gli ingranaggi in costante contatto, evitando il “clunk” che si verifica quando gli ingranaggi invertono la direzione.
- Gruppi ottici bilanciati in modo che il centro di gravità si trovi sull'asse di rotazione. Un carico decentrato crea un disturbo di coppia periodico una volta per giro.
Il livello del firmware: Mettere tutto insieme
Il livello finale è il firmware di controllo del movimento. Riceve l'input del joystick (o il comando di autotracking), applica il limite di velocità proporzionale allo zoom, genera un profilo di velocità con curva a S, verifica la presenza di conflitti con le zone di risonanza e quindi invia al chip del driver un flusso di impulsi di micropassi temporizzati con precisione.
L'intero calcolo avviene in tempo reale, migliaia di volte al secondo. Il risultato è un movimento così fluido che lo spettatore dimentica che la telecamera è seduta su una piattaforma meccanica. L'immagine scivola semplicemente.
Cosa specificare quando si importa
Se vi rifornite di telecamere PTZ dalla Cina e avete bisogno di prestazioni fluide garantite a 40X, inserite questi elementi nel documento dei requisiti tecnici:
- Angolo di passo minimo equivalente in uscita ≤ 0,003° (angolo di passo del motore × rapporto di micropasso × rapporto di trasmissione).
- Il driver deve utilizzare un controllo della corrente a onda sinusoidale con microstepping verificato ≥ 1/32.
- Il firmware deve implementare l'accelerazione della curva a S con l'eliminazione della zona di risonanza.
- Il fornitore deve fornire un video di prova slow-pan con zoom ottico massimo come parte dell'approvazione del campione.
- Il fornitore deve fornire un video di prova di spostamento da punto a punto di 0,02° per verificare la scorrevolezza a passo singolo.
Queste cinque righe vi eviteranno il tipo di disastro che ha vissuto il mio cliente canadese. Sono semplici da verificare e impossibili da falsificare.
Conclusione
Il movimento fluido del PTZ 40X richiede un vero microstepping, l'accelerazione della curva a S, la prevenzione della risonanza e lo smorzamento meccanico, che lavorano insieme, non isolatamente.
1. Ondulazione di coppia nei motori passo-passo e riduzione del microstepping. ︎ 2. Profilazione della corrente sinusoidale per i circuiti integrati di pilotaggio dei motori passo-passo. ︎ 3. Zone di risonanza del motore passo-passo e tecniche per evitarle. ︎ 4. Profilo di movimento a curva S per la riduzione degli urti meccanici. ︎ 5. Specifiche di microstepping del driver passo-passo TI DRV8825. ︎ 6. TMC2209 Bastone SilentStep per il controllo del motore senza vibrazioni. ︎ 7. Progettazione del treno di ingranaggi antiritorno per i meccanismi PTZ. ︎ 8. Selezione dello smorzatore rotante al silicio per lo smorzamento dell'albero motore. ︎ 9. Accoppiamento della velocità dello zoom per il controllo del joystick PTZ al teleobiettivo. ︎ 10. Feedback dell'encoder ad anello chiuso per il rilevamento della perdita di passo. ︎