
Una vez vi una demostración de una PTZ de 40X en la que la imagen saltaba fotograma a fotograma como una presentación de diapositivas. Ese momento me enseñó que el movimiento suave lo es todo.
Los motores paso a paso eliminan el aspecto “escalonado” del zoom 40X mediante el uso de tecnología de microdetección que divide cada paso físico en 256 subdivisiones o más, combinada con perfiles de aceleración de curva S y retroalimentación de codificador de bucle cerrado. Estas técnicas combinadas convierten los saltos visibles y bruscos en un movimiento de cámara fluido y continuo que parece natural incluso con el teleobjetivo más estrecho.
 Movimiento suave del motor paso a paso de la cámara PTZ con zoom 40X
Movimiento suave del motor paso a paso de la cámara PTZ con zoom 40X
En Loyalty-Secu, construimos cámaras PTZ 38X y 40X todos los días. Llevamos años ajustando los controladores de motor, las relaciones de transmisión y el firmware para resolver exactamente este problema. A continuación, le guiaré a través de las cuatro preguntas más comunes que nuestros clientes preguntan sobre el rendimiento del motor paso a paso en alto zoom. Cada respuesta profundiza en la ingeniería para que pueda escribir mejores especificaciones y elegir mejores proveedores.
Índice
¿Utiliza su cámara la tecnología Micro-Stepping para realizar panorámicas lentas ultrasuaves?
He visto demasiadas cámaras PTZ que afirman tener un “movimiento horizontal suave” en la hoja de datos, pero que ofrecen un tartamudeo visible a 30X y más. La distancia entre el marketing y la realidad es enorme.
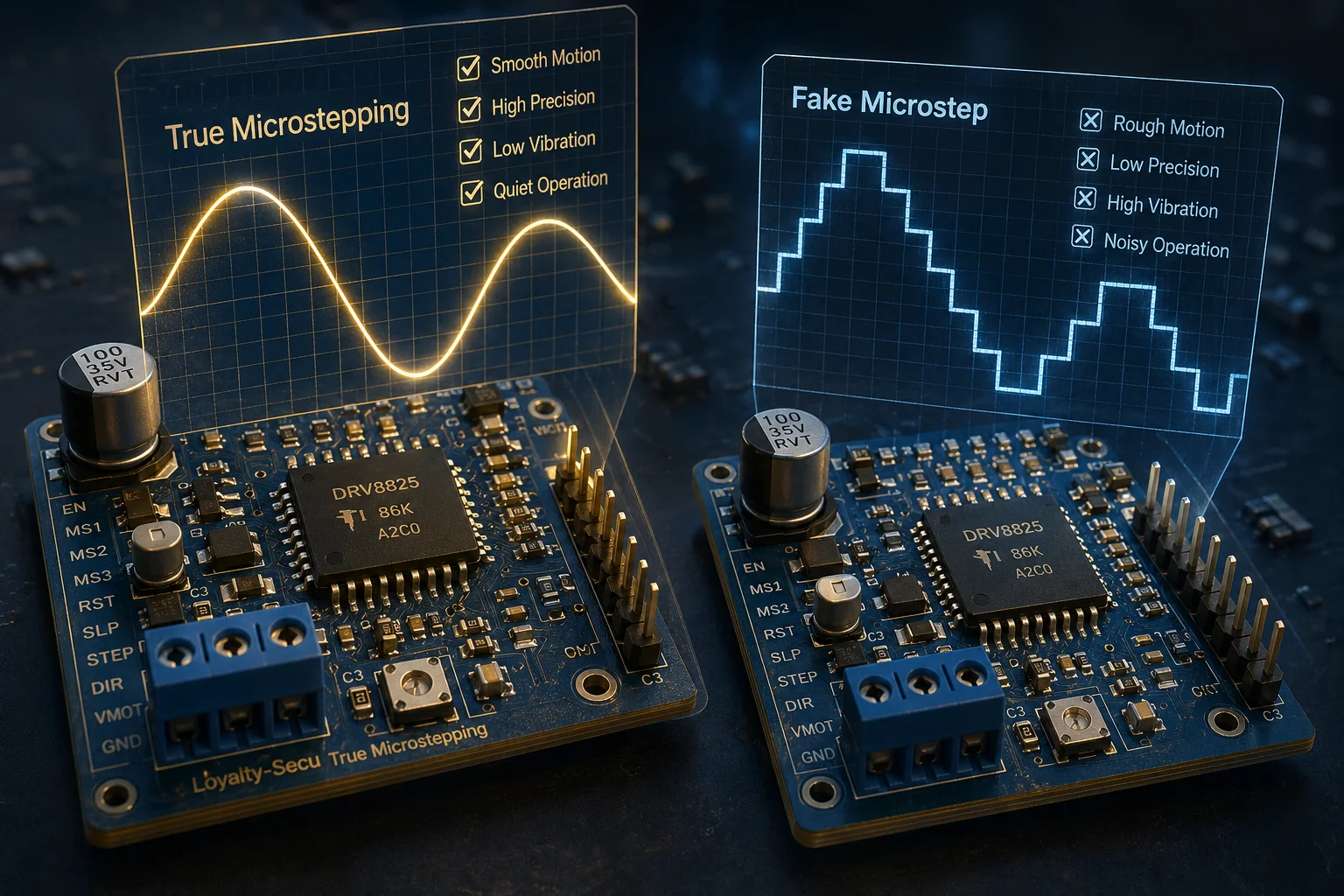
Sí, nuestras cámaras utilizan microstepping real con control de corriente de onda senoidal a 1/128 o 1/256 de subdivisión. Esto divide un paso completo estándar de 1,8° en miles de pequeños subpasos, de modo que el cabezal panorámico se mueve en una rotación casi continua en lugar de saltar de una posición a otra.
 Controlador de motor PTZ microstepping control de corriente sinusoidal
Controlador de motor PTZ microstepping control de corriente sinusoidal
Por qué falla la conducción a 40X
Un motor paso a paso bifásico estándar tiene un ángulo de paso de 1,8°. Esto significa 200 pasos por revolución completa. Si la relación de transmisión es de 1:10, cada paso de salida es de 0,18°. Parece poco. Pero con un zoom de 40 aumentos, el campo de visión es extremadamente estrecho, a menudo inferior a 2°. Así que un solo salto de 0,18° desplaza la imagen aproximadamente 9% de todo el fotograma. El espectador ve un salto fuerte y visible.
Ahora compáralo con el microstepping de 1/256. Cada paso de salida se convierte en 0,18° ÷ 256 = 0,000703°. Es tan pequeño que, incluso a 40X, el desplazamiento de la imagen por paso es invisible para el ojo humano.
Microstepping real vs. falso
No todos los microstepping son iguales. Los controladores baratos se limitan a cambiar el número de un registro, pero en realidad no dan forma a la onda actual. El resultado es lo que los ingenieros llaman “subdivisión falsa”. El motor sigue vibrando y saltando porque la corriente en cada bobina no sigue una curva sinusoidal limpia.
El verdadero microstepping requiere:
- Perfil de corriente senoidal en ambas fases (fase A = sen, fase B = cos).
- Detección de corriente de alta resolución para que el conductor pueda mantener cada microposición con precisión.
- Diseño de placas de circuito impreso de bajo ruido para evitar que las interferencias eléctricas distorsionen la forma de onda.
| Característica | Conductor barato (Microstep falso) | Controlador de calidad (True Microstep) |
|---|---|---|
| Entorno de la subdivisión | 1/16 o 1/32 en papel | 1/128 o 1/256 verificado |
| Forma de onda de la corriente | Escalera en bruto | Onda sinusoidal suave |
| Vibración a baja velocidad | Zumbido alto y audible | Muy bajo, casi silencioso |
| Calidad de imagen en panorámica 40X | Tartamudeo visible | Deslizamiento suave y continuo |
| Ejemplos de chips típicos | Clones genéricos chinos | TI DRV8825, TMC2209/5160 |
Qué preguntar a su proveedor
Cuando evalúe un PTZ de cualquier fábrica, pida dos cosas:
- Un vídeo a cámara lenta grabado con el zoom óptico al máximo. Reprodúcelo fotograma a fotograma. Si ves saltos discretos, el microstepping no funciona correctamente.
- El modelo de chip controlador y la relación de subdivisión real. Una fábrica reputada compartirá esto sin dudarlo.
En Loyalty-Secu, proporcionamos estos vídeos de prueba como parte de nuestro proceso estándar de evaluación de muestras. Creemos que si el rendimiento del motor no puede superar una prueba de vídeo, no debe enviarse.
¿Por qué la imagen se ve “desigual” en los PTZ baratos cuando se sigue a una persona a distancia?
Tuve un cliente en Canadá que compró 50 unidades PTZ económicas para un proyecto de oleoductos. Con el zoom al máximo, el seguimiento automático parecía como si la cámara tuviera un ataque. Sustituyó las 50 en seis meses.
El aspecto espasmódico se debe a tres problemas combinados: una resolución de paso gruesa que crea saltos visibles, resonancia mecánica que amplifica la vibración a ciertas velocidades y comandos bruscos de arranque y parada que hacen que el conjunto del objetivo tiemble. Las PTZ baratas reducen los costes en las tres áreas, por lo que el problema se multiplica en las distancias focales largas.
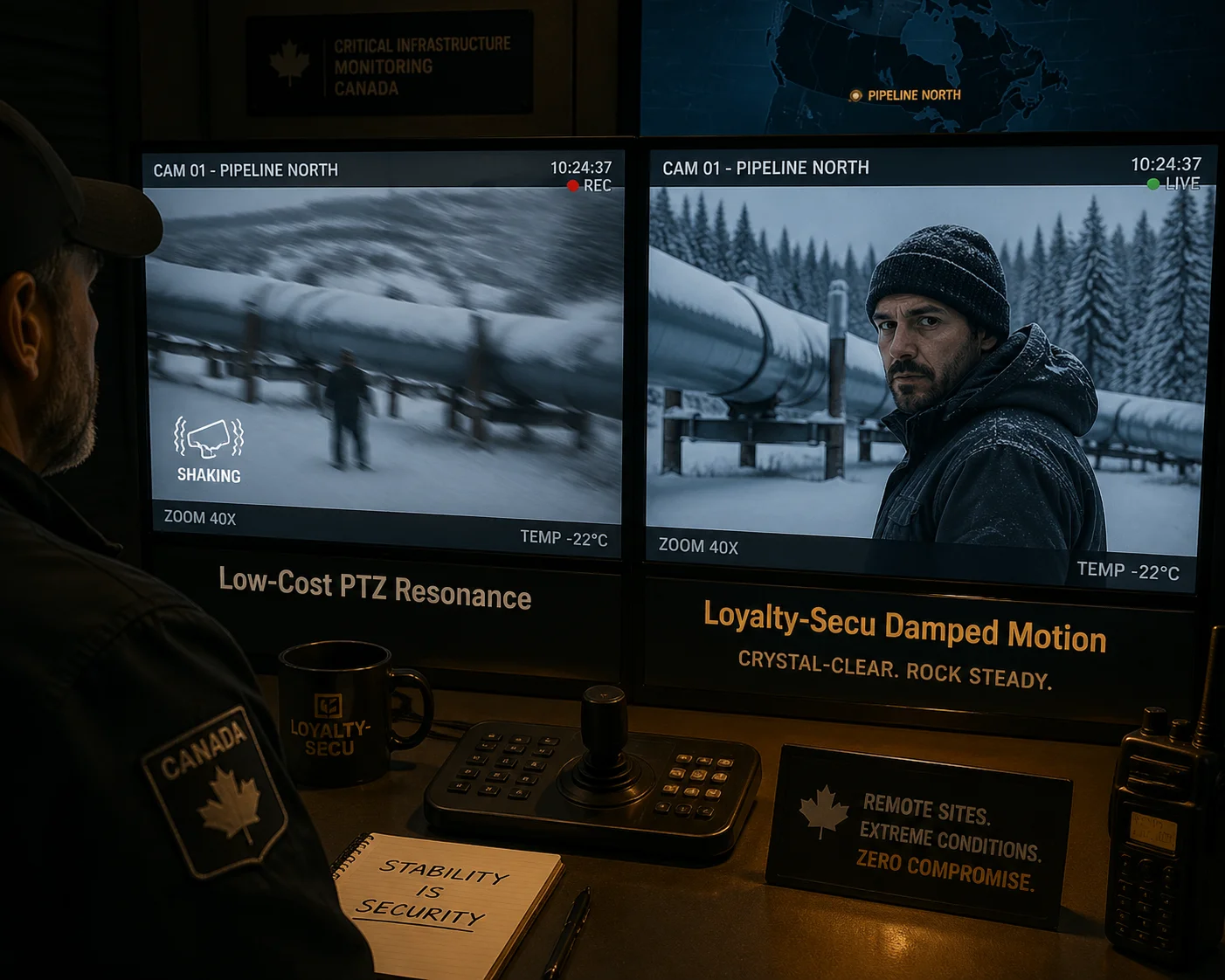 Comparación entre imagen PTZ irregular e imagen PTZ fluida con zoom alto
Comparación entre imagen PTZ irregular e imagen PTZ fluida con zoom alto
Problema 1: Resolución de pasos gruesos
Como he explicado antes, un controlador de paso completo o medio paso con un zoom de 40X produce saltos de imagen que son claramente visibles. Pero las PTZ baratas van aún más lejos en la dirección equivocada. A menudo utilizan motores con ángulos de paso de 7,5° (sólo 48 pasos por revolución) porque cuestan menos. Incluso con microstepping de 1/16, cada paso de salida sigue siendo demasiado grande para trabajar con teleobjetivo.
Problema 2: Zonas de resonancia
Todos los motores paso a paso tienen frecuencias de resonancia naturales. Cuando la velocidad del motor coincide con una de estas frecuencias, la vibración aumenta drásticamente. En un PTZ barato, el firmware no conoce estas zonas. Simplemente hace funcionar el motor a cualquier velocidad que el joystick ordene. Si esa velocidad cae en una zona de resonancia, toda la cámara tiembla.
Un buen firmware localiza las zonas de resonancia durante la calibración de fábrica y las salta rápidamente o las evita por completo.
Problema 3: Arranque y parada bruscos
Un controlador barato envía una orden de velocidad de onda cuadrada: de cero a la velocidad objetivo instantáneamente, luego de la velocidad objetivo a cero instantáneamente. Esto crea un pico de par en ambos extremos. El cabezal de la cámara se tambalea hacia delante, se sobredimensiona y luego rebota. A 40X, este rebote se magnifica en una violenta sacudida de la imagen que puede tardar un segundo completo en estabilizarse.
Cómo las PTZ de calidad resuelven los tres problemas
| Problema | Enfoque PTZ barato | Enfoque PTZ de calidad |
|---|---|---|
| Resolución de pasos | Motor 7,5°, micropaso 1/8 | Motor 0,9°, 1/128+ micropasos |
| Resonancia | Sin mapa de resonancia | El firmware omite las zonas de resonancia |
| Arranque/parada | Comando de onda cuadrada | Curva en S o rampa trapezoidal |
| Amortiguación | Sin amortiguador mecánico | Disco de inercia o amortiguador de silicona en el eje |
| Tren de engranajes | Engranajes de plástico con holgura | Engranajes metálicos con muelle antirretroceso |
El coste real de lo “barato”
Mi cliente de Canadá lo aprendió por las malas. Las 50 unidades baratas le costaron $8.000 por adelantado. Pero las unidades de repuesto, la mano de obra para cambiarlas en postes remotos de tuberías y la pérdida de credibilidad del contrato le costaron más de $40.000. Cuando se compran cámaras PTZ para proyectos serios, el sistema del motor no es el lugar para ahorrar dinero.
¿Puedo ajustar la velocidad de giro/inclinación dinámicamente en función de mi nivel de zoom actual?
Me hacen esta pregunta en casi todas las ferias. La respuesta sorprende a mucha gente porque la mayoría de las cámaras PTZ ya tienen esta función, solo que la implementan mal.
Sí, las cámaras PTZ profesionales pueden y deben vincular automáticamente la velocidad de giro/inclinación al nivel de zoom actual. Esta función se llama “paneo proporcional” o “acoplamiento de velocidad de zoom”. A medida que aumenta el zoom, el firmware reduce la velocidad máxima de giro e inclinación para que la imagen se mueva a una velocidad cómoda y observable en pantalla.
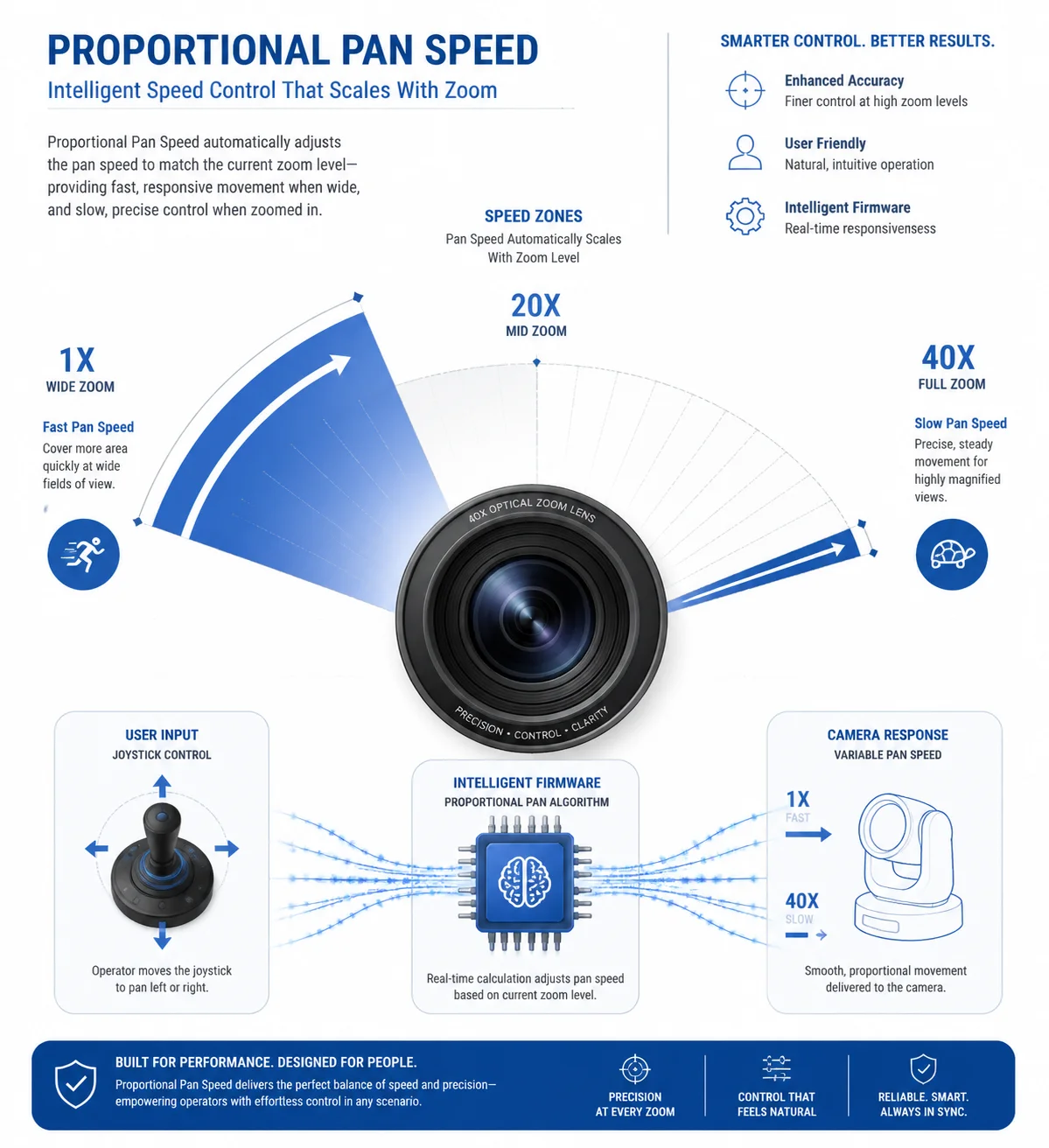 Velocidad de desplazamiento proporcional PTZ vinculada al diagrama del nivel de zoom
Velocidad de desplazamiento proporcional PTZ vinculada al diagrama del nivel de zoom
Por qué es importante a 40X
Con un gran angular de 1X, una velocidad de barrido de 100°/s parece normal. La escena recorre la pantalla a un ritmo cómodo. Pero a 40X, los mismos 100°/s harían que la imagen se difuminara hasta convertirse en una raya ilegible. El campo de visión es 40 veces más estrecho, por lo que cada grado de rotación desplaza la imagen 40 veces más en la pantalla.
Para mantener constante la velocidad de movimiento en pantalla, la velocidad de barrido debe disminuir en un factor aproximadamente proporcional a la relación de zoom. A 40X, esto significa que la velocidad máxima de desplazamiento debe ser de unos 2,5°/s o menos.
Cómo lo gestiona el firmware
El motor del zoom informa de su posición actual al controlador principal. El controlador consulta una tabla de límites de velocidad que asigna a cada posición de zoom una velocidad máxima permitida de giro/inclinación. Cuando el operador pulsa el joystick, el controlador limita la velocidad del motor al valor de la tabla.
El concepto de tabla de velocidad límite
He aquí un ejemplo simplificado del aspecto de esta tabla dentro del firmware:
| Nivel de zoom | Campo de visión (horizontal) | Velocidad máxima de paneo | Velocidad máxima de inclinación |
|---|---|---|---|
| 1X | 58° | 120°/s | 90°/s |
| 10X | 5.8° | 12°/s | 9°/s |
| 20X | 2.9° | 6°/s | 4.5°/s |
| 30X | 1.9° | 4°/s | 3°/s |
| 40X | 1.45° | 2.5°/s | 2°/s |
Qué ocurre sin el acoplamiento zoom-velocidad
Sin esta función, el operador debe reducir manualmente la entrada del joystick con un zoom alto. Esto es agotador e impreciso. La mayoría de los operadores sobrepasan el objetivo y luego lo corrigen en exceso, lo que crea un bamboleo de vaivén que da un aspecto poco profesional en las secuencias grabadas.
Un paso más allá: Aceleración adaptativa
En Loyalty-Secu, nuestro firmware no se limita a limitar la velocidad. También ajusta la curva de aceleración en función del nivel de zoom. A 40X, el tiempo de rampa de la curva S es más largo, de modo que la cámara se pone en movimiento con más suavidad. A 1X, la rampa es más corta para una respuesta más rápida. Este doble ajuste (límite de velocidad y conformación de la aceleración) proporciona a los operadores una “sensación” uniforme en todos los niveles de zoom.
Si está redactando las especificaciones para su próxima compra de PTZ, incluya esta línea: “La velocidad de paneo/inclinación se escalará automáticamente en proporción inversa a la relación de zoom óptico, con aceleración de curva S ajustada por nivel de zoom”. Esta frase descartará la mayoría de los productos de gama baja.
¿Cómo minimiza el controlador del motor la vibración en el ángulo de teleobjetivo más estrecho?
Pasé tres meses en 2022 trabajando con nuestro equipo de firmware para acabar con una sutil vibración de 2 píxeles que sólo aparecía a partir de 38X. Resultó ser un problema de resonancia a una velocidad de paneo muy específica. Solucionarlo me enseñó mucho.
El excitador de motor minimiza la vibración al máximo teleobjetivo combinando el microdireccionamiento de alta subdivisión con la evitación activa de resonancias, los perfiles de movimiento de curva en S y la amortiguación mecánica. Juntos, estos métodos reducen la ondulación del par y evitan que el motor se desplace a velocidades en las que su frecuencia natural provoque oscilaciones.
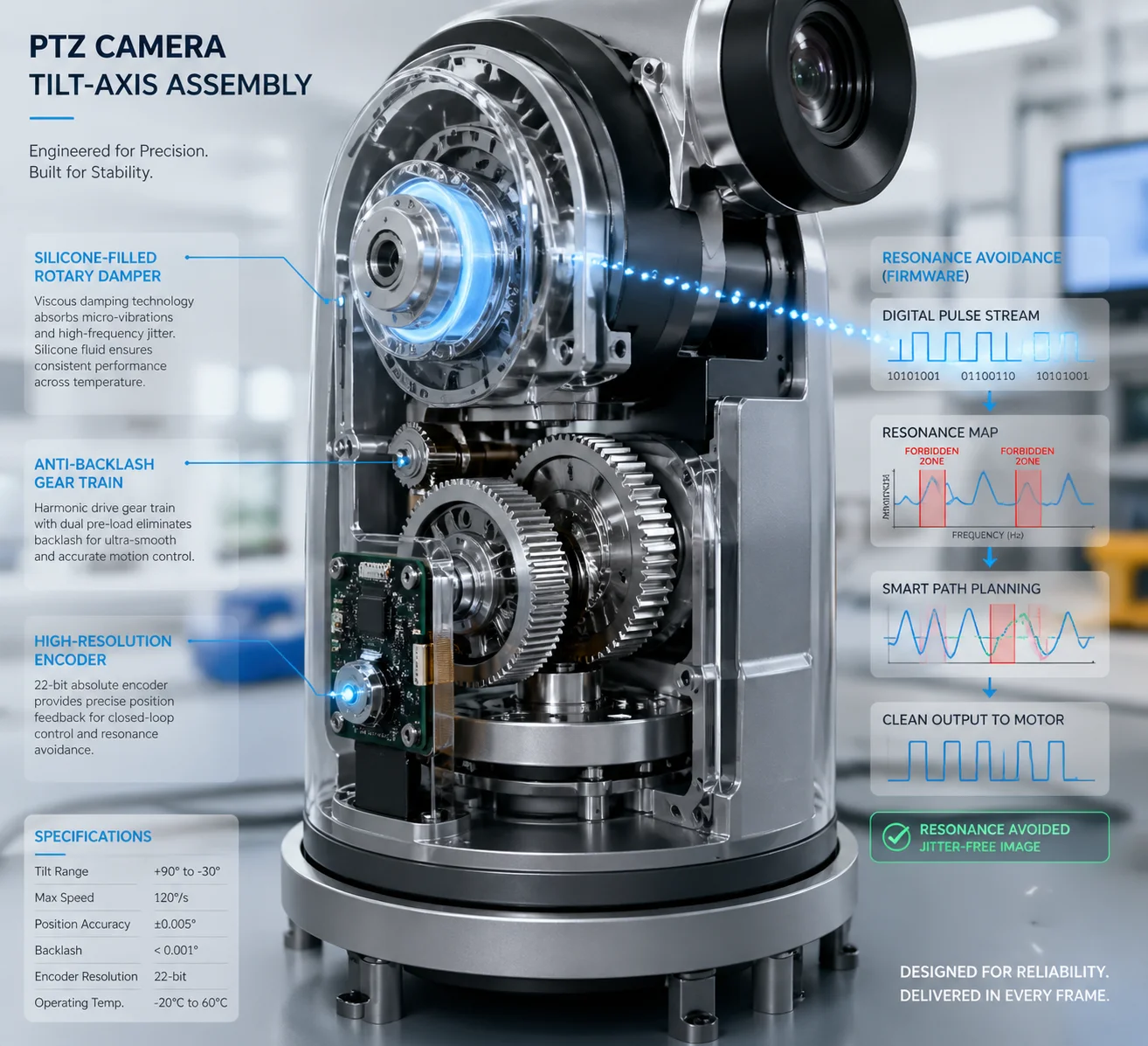 Sistema de amortiguación de vibraciones de motor paso a paso para cámara PTZ
Sistema de amortiguación de vibraciones de motor paso a paso para cámara PTZ
Comprender la ondulación del par
Cada motor paso a paso produce una pequeña fluctuación de par al pasar de un paso al siguiente. Esto se denomina rizado de par 1. Con un zoom bajo, esta ondulación es invisible porque el campo de visión es amplio. Pero a 40X, incluso una oscilación de 0,001° se traduce en una fluctuación de píxeles visible en pantalla.
El micropaso reduce el rizado del par porque las transiciones de corriente entre pasos son graduales, no bruscas. Un micropaso de 1/256 produce una ondulación de par que es aproximadamente 1/256 de la ondulación del paso completo. Suele ser lo suficientemente pequeño como para ser invisible incluso a 40X.
Evitación activa de la resonancia
Los motores paso a paso tienen dos zonas de resonancia principales:
- Resonancia a baja velocidad - normalmente alrededor de 1-3 rev/s para motores pequeños. Esta es la zona más peligrosa para las cámaras PTZ, ya que los movimientos panorámicos lentos con zoom alto suelen caer justo en ella.
- Inestabilidad de gama media - una zona más amplia en la que el motor puede perder la sincronización.
Nuestro firmware mide el perfil de resonancia de cada modelo de motor durante el desarrollo. A continuación, programa “zonas prohibidas” en el regulador de velocidad. Cuando la velocidad objetivo cae dentro de una zona prohibida, el controlador salta rápidamente a través de ella durante la aceleración o cambia a una velocidad segura cercana.
Detalles de la amortiguación mecánica
Incluso con un control eléctrico perfecto, parte de la energía de vibración sigue llegando al cuerpo de la cámara a través del eje del motor. Para absorber esta energía, utilizamos:
- Amortiguadores rotativos rellenos de silicona en el eje de salida del motor. Estos convierten la energía de vibración en calor.
- Trenes de engranajes antirretroceso que mantienen los engranajes en contacto constante, evitando el “ruido metálico” que se produce cuando los engranajes invierten su sentido.
- Lentes equilibradas para que el centro de gravedad se sitúe en el eje de rotación. Una carga descentrada crea una perturbación periódica del par una vez por revolución.
La capa de firmware: Unirlo todo
La última capa es el firmware de control del movimiento. Toma la entrada del joystick (o el comando de seguimiento automático), aplica el límite de velocidad zoom-proporcional, genera un perfil de velocidad de curva en S, comprueba si hay conflictos en la zona de resonancia y, a continuación, envía un flujo de pulsos de micropasos sincronizados con precisión al chip controlador.
Todo este cálculo se realiza en tiempo real, miles de veces por segundo. El resultado es un movimiento tan suave que el espectador se olvida de que la cámara está sobre una plataforma mecánica. La imagen simplemente se desliza.
Qué especificar al importar
Si está comprando cámaras PTZ en China y necesita un rendimiento fluido garantizado a 40X, incluya estos puntos en su documento de requisitos técnicos:
- Ángulo de paso de salida equivalente mínimo ≤ 0,003° (ángulo de paso del motor × relación de micropaso × relación de transmisión).
- El excitador debe utilizar control de corriente senoidal con ≥ 1/32 microstepping verificado.
- El firmware debe implementar la aceleración de curva S con evitación de zona de resonancia.
- El proveedor debe proporcionar un vídeo de prueba a cámara lenta con el zoom óptico máximo como parte de la aprobación de la muestra.
- El proveedor debe proporcionar un vídeo de prueba de movimiento punto a punto de 0,02° para verificar la suavidad de un solo paso.
Estas cinco líneas le evitarán el desastre que sufrió mi cliente canadiense. Son fáciles de verificar e imposibles de falsificar.
Conclusión
El movimiento suave de 40X PTZ requiere un verdadero microdireccionamiento, aceleración de curva en S, evitación de resonancia y amortiguación mecánica, trabajando juntos, no de forma aislada.
1. Ondulación del par en motores paso a paso y reducción del micropaso. ︎ 2. Perfiles de corriente sinusoidal para circuitos integrados de controladores de motores paso a paso. ︎ 3. Zonas de resonancia del motor paso a paso y técnicas para evitarlas. ︎ 4. Perfil de movimiento de curva en S para la reducción del choque mecánico. ︎ 5. Especificaciones de micropasos del controlador de pasos TI DRV8825. ︎ 6. TMC2209 SilentStep stick para el control del motor sin vibraciones. ︎ 7. Diseño de tren de engranajes anti-retroceso para mecanismos PTZ. ︎ 8. Selección del amortiguador rotativo de silicona para la amortiguación del eje del motor. ︎ 9. Acoplamiento de velocidad de zoom para el control del joystick PTZ en teleobjetivo. ︎ 10. Retroalimentación del codificador en bucle cerrado para la detección de pérdida de pasos. ︎