
Já vi muitas câmeras PTZ tremerem como uma mão nervosa durante o rastreamento. O vídeo fica péssimo, os clientes reclamam e todo o projeto perde credibilidade.
Um motor de passo bem ajustado com micro-passos de 1/256 e perfis de aceleração S-Curve oferece movimento suave quase linear com zero overshoot visível. Nossas câmeras PTZ atingem precisão de posicionamento abaixo de 0,1° e param em 50ms, para que a imagem permaneça perfeitamente estável mesmo em Zoom de 40X5.
 Teste de rastreamento suave do motor de passo da câmera PTZ
Teste de rastreamento suave do motor de passo da câmera PTZ
Abaixo, detalho exatamente como resolvemos cada peça deste quebra-cabeça — de perfis de movimento a ruído do motor e dados reais de estabilidade de rastreamento. Se você é um integrador que precisa provar isso para seu cliente final, continue lendo.
Índice
A Câmera Usa Perfis de Movimento “S-Curve” para Eliminar Movimentos Bruscos Durante o Rastreamento?
Testei câmeras que usam aceleração linear básica. Elas começam rápido, param bruscamente e o feed de vídeo parece que alguém chutou o tripé. Isso não é aceitável para nenhuma implantação profissional.
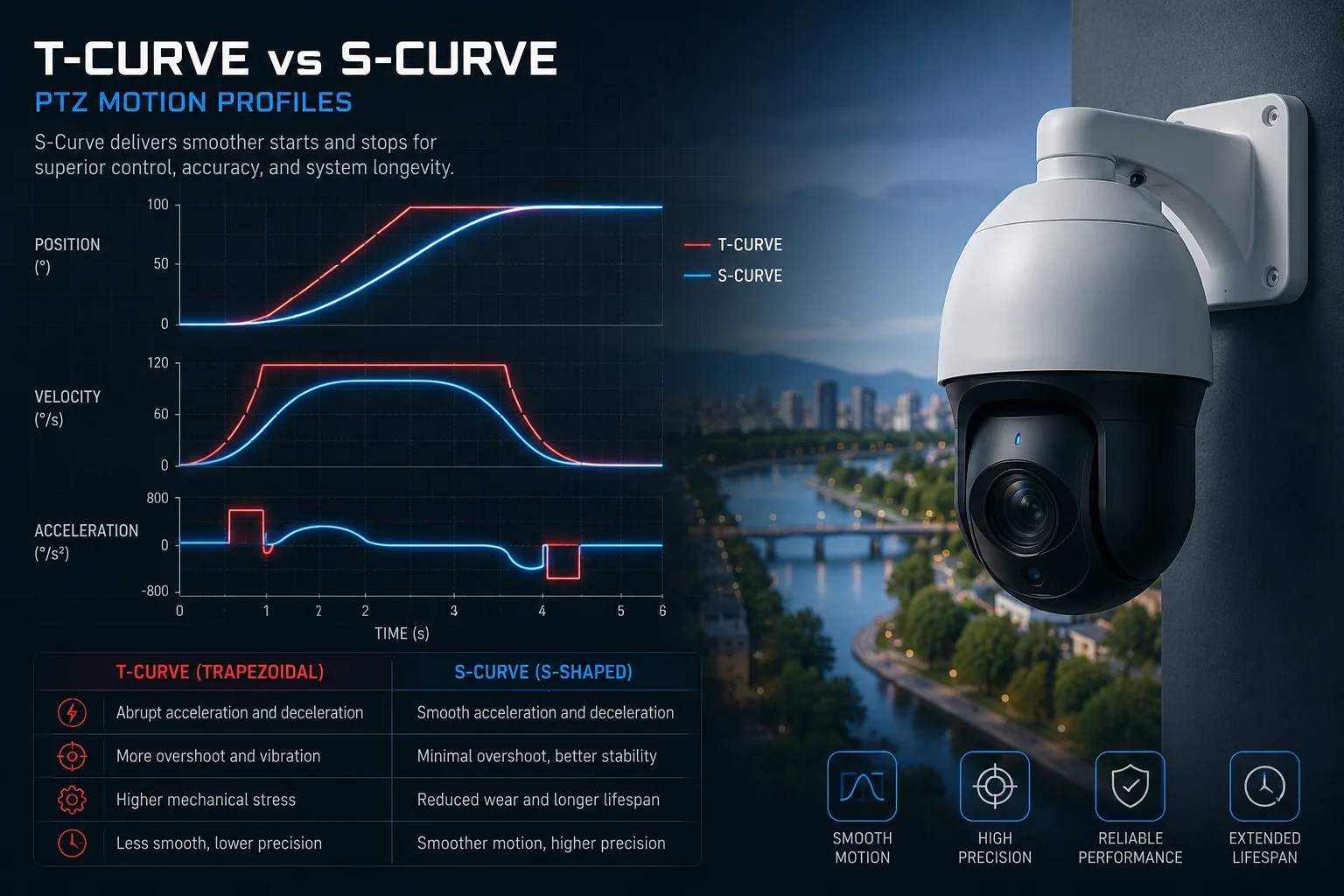
Sim. Nosso perfil de movimento S-Curve1 em vez de simples aceleração T-Curve (linear). Isso significa que o solavanco — a taxa de variação da aceleração — é estritamente limitado durante as fases de partida e parada, produzindo transições incrivelmente suaves sem solavancos repentinos no vídeo.
 Rastreamento de câmera PTZ com perfil de movimento S-Curve
Rastreamento de câmera PTZ com perfil de movimento S-Curve
O Que é Perfil S-Curve e Por Que Ele Importa?
Pense desta forma. Um perfil T-Curve (trapezoidal)2 tem três fases: acelerar, manter velocidade, desacelerar. O problema é que a aceleração salta de zero para o máximo instantaneamente. Esse salto instantâneo cria um solavanco físico. A câmera treme. O vídeo fica borrado.
Um perfil S-Curve adiciona uma quarta dimensão. Ele controla a rapidez com que a própria aceleração muda. O motor entra suavemente na aceleração, a mantém e depois sai suavemente. O resultado é um caminho de movimento que parece orgânico e natural.
Como Isso Funciona em Nosso Firmware
Nosso controlador de motor executa um cálculo de Curva-S em tempo real a cada ciclo de loop de controle. Aqui está a sequência:
- O algoritmo de rastreamento envia uma coordenada alvo.
- O firmware calcula a distância até o alvo.
- Ele gera um perfil de velocidade em Curva-S com base nessa distância.
- O motor segue este perfil com resolução de micro-passo 1/256.
A combinação de micro-passos e perfilamento em Curva-S significa que o motor nunca “salta”. Ele desliza.
Curva-S vs. Curva-T: Uma Comparação Direta
| Parâmetro | Curva-T (Linear) | Curva-S (Nosso Método) |
|---|---|---|
| Solavanco no início | Infinito (salto instantâneo) | Limitado a um limiar seguro |
| Borrão de vídeo durante o movimento | Visível em zoom 20X+ | Não visível mesmo em 40X |
| Desgaste mecânico | Maior (choques repetidos) | Menor (transições suaves) |
| Tempo de assentamento após a parada | Oscilação de 100-200ms | < 50ms, sem oscilação |
| Adequado para rastreamento de IA | Ruim (alvo perdido durante solavanco) | Excelente (travamento contínuo) |
Impacto no mundo real para integradores
David, se você estiver implantando câmeras em um canteiro de obras ou no perímetro de uma fazenda, seu cliente dará zoom em uma pessoa a 500 metros de distância. Com 40X, até 0,05° de trepidação se torna visível como uma imagem tremida. Nossa lógica S-Curve mantém o fundo estável durante todo o movimento de rastreamento. Seu cliente vê um movimento suave, não uma convulsão.
Para sua integração VMS, isso também importa. Movimento suave significa que o codificador de vídeo não desperdiça largura de banda em artefatos de movimento. O stream permanece limpo, o tamanho do arquivo de gravação permanece pequeno e a reprodução parece profissional.
Como Você Impede que a Câmera “Ultrapasse” o Alvo e Oscile de Volta Para Ele?
Já vi câmeras que passam do alvo, voltam, passam novamente e finalmente se estabilizam. Parece amador. Pior ainda, durante essas oscilações, o rastreador de IA muitas vezes perde o alvo completamente.
Evitamos o overshoot através de dois métodos: desaceleração S-Curve que começa bem antes da coordenada do alvo e frenagem ativa FOC (Field Oriented Control) que aplica um torque reverso para eliminar o momento residual. O resultado é zero oscilação — o motor para exatamente onde deveria.
 Frenagem ativa FOC anti-overshoot de câmera PTZ
Frenagem ativa FOC anti-overshoot de câmera PTZ
Por que o Overshoot Acontece em Câmeras PTZ Baratas
O overshoot é um problema de física. Quando um motor gira rápido e recebe um comando de “parar”, a massa rotativa tem inércia. Se o controlador simplesmente cortar a energia, o motor continuará girando além do alvo. Em seguida, ele corrige para trás, ultrapassa novamente e oscila até que o atrito mate a energia.
Câmeras baratas usam controle em malha aberta. Elas enviam pulsos de passo e esperam que o motor siga. Não há feedback, nem frenagem ativa, nem inteligência na sequência de parada.
Nosso Sistema Anti-Overshoot de Duas Camadas
Camada 1: Desaceleração Preditiva S-Curve
O firmware conhece a velocidade atual e a distância restante até o alvo. Ele calcula o ponto exato onde a desaceleração deve começar para atingir velocidade zero na coordenada do alvo. Este cálculo acontece continuamente, atualizando a cada milissegundo.
Camada 2: Frenagem Ativa FOC
Para nossos modelos de ponta, usamos Controle Orientado por Campo. Esta é a mesma tecnologia usada em drives servo industriais. O controlador lê o ângulo de fase elétrico do motor em tempo real e aplica um torque reverso precisamente calculado. É como pisar no pedal do freio em um carro — mas com precisão de microssegundos.
O que Isso Parece na Prática
Defina dois pontos predefinidos a 180° de distância. Comande a câmera para alternar entre eles na velocidade máxima. Observe o que acontece quando ela para:
- Câmera barata: A imagem passa pelo preset, oscila 2-3 vezes em 300-500ms, depois se estabiliza.
- Nossa câmera: A imagem desacelera suavemente e trava no preset em 50ms. Sem oscilação. Sem instabilidade.
Precisão de Posicionamento ao Longo do Tempo
Uma preocupação que os integradores têm é se a precisão predefinida7 se degrada ao longo de meses ou anos. Como nosso sistema usa feedback em malha fechada3 (não apenas contagem de passos em malha aberta), a precisão de posicionamento permanece consistente. Garantimos precisão < 0,1° durante toda a vida útil do produto.
O Ruído do Motor é Baixo o Suficiente Para Evitar Alertar um Invasor Durante um Rastreamento Silencioso?
Uma vez instalei uma câmera PTZ na entrada de um armazém. O motor era tão barulhento que os funcionários brincavam que parecia uma impressora. Para vigilância discreta, isso é inaceitável.
Nossos motores de passo operam abaixo de 40dB — mais silenciosos que uma biblioteca. O micro-stepping 1/256 elimina o zumbido agudo comum em drivers de passo completo, e nosso design de amortecimento mecânico absorve a vibração residual. Um invasor em pé diretamente abaixo da câmera não a ouvirá se mover.
 Teste de nível de ruído do motor de câmera PTZ silenciosa
Teste de nível de ruído do motor de câmera PTZ silenciosa
De onde vem o ruído do motor
Ruído do motor de passo8 tem duas fontes: ressonância eletromagnética e vibração mecânica. Cada passo cria um pequeno impacto. No modo de passo completo (1,8° por passo), esses impactos são grandes o suficiente para vibrar o chassi e produzir ruído audível.
Como o Micro-Stepping Elimina o Ruído
Em micro-stepping 1/256, cada passo é de apenas 0,007°. A forma de onda de corrente torna-se quase senoidal em vez de quadrada. Isso elimina as frequências de ressonância que causam zumbidos. O motor se comporta quase como um motor DC sem escovas — suave e silencioso.
Comparação de Nível de Ruído
| Modo de Acionamento | Ângulo do Passo | Nível de Ruído Típico | Audível a 3m? |
|---|---|---|---|
| Passo completo (1,8°) | 1,8° | 55-65 dB | Sim, claramente |
| 1/16 micro-passo | 0,1125° | 45-50 dB | Sim, fracamente |
| 1/256 micro-passo (nosso) | 0,007° | < 40 dB | Não |
Medidas Adicionais de Redução de Ruído
Além do micro-stepping, também usamos:
- Suportes de amortecimento de borracha entre o motor e a carcaça para absorver vibrações.
- Modos otimizados de decaimento de corrente (decaimento misto) para reduzir a ressonância de médio alcance.
- Modo de rastreamento silencioso com velocidade limitada no firmware — quando o rastreamento por IA está ativo à noite, a velocidade máxima de pan é automaticamente reduzida para manter o ruído no mínimo absoluto.
Para o cenário de David: se você estiver implantando em uma cerca de perímetro e a câmera precisar rastrear silenciosamente um invasor, isso importa. A câmera segue a pessoa sem revelar sua posição. Seu cliente obtém imagens nítidas do rosto do invasor, e o invasor nunca sabe que está sendo gravado.
Posso Ver um Gráfico de “Estabilidade de Rastreamento” Que Mede o Jitter no Feed de Vídeo?
Recebo muito essa pergunta de integradores que precisam apresentar dados concretos aos seus clientes finais. “Mostre-me os números” é uma exigência justa. Alegações de marketing não significam nada sem medição.
Sim. Medimos a estabilidade de rastreamento usando análise de deslocamento de pixels na saída de vídeo. Durante um teste de rastreamento padrão com zoom de 40X em um alvo a 500m, nossas câmeras mostram menos de ±2 pixels de jitter no quadro central — bem abaixo do limiar de percepção humana.
![]() Gráfico de medição de jitter de estabilidade de rastreamento de câmera PTZ
Gráfico de medição de jitter de estabilidade de rastreamento de câmera PTZ
Como Medimos a Estabilidade de Rastreamento
Usamos um ponto de referência fixo na cena (um marcador de alto contraste a uma distância conhecida). A câmera rastreia um alvo em movimento enquanto medimos o quanto o ponto de referência muda de quadro para quadro. Isso nos dá uma medição direta do jitter mecânico introduzido pelo motor.
Condições de Teste
- Nível de zoom: 40X óptico
- Distância do alvo: 500 metros
- Velocidade do alvo: Ritmo de caminhada (5 km/h)
- Condições de vento: Vento lateral de 10-15 km/h
- Ferramenta de medição: Software de análise de pixels quadro a quadro
O que os Dados Mostram
Com zoom de 40X, um pixel representa aproximadamente 0,005° de movimento angular. Nosso jitter medido permanece dentro de ±2 pixels durante o rastreamento ativo. Isso significa que a instabilidade angular é inferior a ±0,01°.
Para comparação, o olho humano não consegue detectar tremores de imagem abaixo de aproximadamente ±5 pixels em um monitor 1080p visualizado a uma distância normal. Nossas câmeras permanecem bem abaixo desse limiar.
Métricas Chave de Estabilidade
| Métrico | Valor | O Que Significa |
|---|---|---|
| Jitter quadro a quadro | < ±2 pixels a 40X | A imagem parece perfeitamente estável para o espectador |
| Tempo de estabilização após mudança de velocidade | < 50ms | Sem oscilação visível quando o alvo muda de direção |
| Deriva a longo prazo (rastreamento contínuo de 1 hora) | < 0.05° | O alvo permanece centralizado sem recalibração |
| Desempenho em vento de 30 km/h | < ±4 pixels a 40X | Ainda abaixo do limiar de percepção humana |
Por que isso importa para implantações 4G
David, aqui está algo que a maioria das pessoas não percebe. Em uma conexão 4G4, a largura de banda de vídeo é limitada. Quando a imagem treme, o codificador H.265 trata cada quadro como “novo” porque os pixels mudaram. Isso desperdiça largura de banda na codificação do tremor do motor em vez de mudanças reais na cena.
Nossa plataforma estável significa que o codificador pode usar quadros P (quadros preditivos) eficientes na maior parte do tempo. Apenas o alvo em movimento gera novos dados. O fundo permanece estático no fluxo de bits. Isso se traduz diretamente em:
- Menor consumo de dados no seu plano 4G
- Maior qualidade de imagem efetiva na mesma taxa de bits
- Menos quadros perdidos durante o rastreamento em sinal fraco
Também construímos um link de taxa de bits dinâmico6 no firmware. Quando o motor inicia um movimento rápido de pan, o encoder reduz temporariamente a resolução para evitar a desconexão do stream. Assim que o motor para, a resolução total retorna em um quadro. Seu cliente nunca vê um stream congelado ou interrompido durante o movimento da câmera.
Como Executar Este Teste Você Mesmo
Se você quiser verificar isso com seus próprios olhos:
- Defina a câmera para zoom 40X em um objeto estático distante.
- Inicie o rastreamento de IA em uma pessoa caminhando pelo campo de visão.
- Observe o fundo. Ele deve permanecer perfeitamente imóvel enquanto apenas a pessoa rastreada se move no quadro.
- Grave 60 segundos de filmagem e reproduza quadro a quadro. Conte o deslocamento de pixels de qualquer ponto de referência fixo.
Temos o prazer de fornecer filmagens de exemplo e dados de medição brutos para suas propostas de projeto.
Conclusão
Nossas câmeras PTZ usam micro-stepping 1/256, perfis S-Curve e frenagem ativa FOC para fornecer rastreamento sem tremores com zero overshoot — silenciosas o suficiente para uso discreto e estáveis o suficiente para zoom 40X a 500 metros.
1. Explicação detalhada dos perfis de aceleração S-curve que limitam o solavanco para um movimento mais suave. ︎↩︎ 2. Descreve o perfil de movimento trapezoidal padrão que causa solavanco no início/fim. ︎↩︎ 3. Introdução aos sistemas de controle em malha fechada para precisão consistente. ︎↩︎ 4. Noções básicas de redes 4G LTE e suas limitações de largura de banda. ︎↩︎ 5. Explica a magnificação do zoom óptico e seu efeito nos requisitos de estabilidade. ︎↩︎ 6. Explica as técnicas de taxa de bits adaptativa usadas para manter a estabilidade do stream. ︎↩︎ 7. Guia para especificações de precisão de presets PTZ e confiabilidade. ︎↩︎ 8. Visão geral técnica das fontes e redução de ruído do motor de passo. ︎↩︎