
Ich habe zu viele PTZ-Kameras gesehen, die beim Tracking wie eine nervöse Hand wackeln. Das Video sieht schrecklich aus, Kunden beschweren sich und das ganze Projekt verliert an Glaubwürdigkeit.
Ein gut abgestimmter Schrittmotor mit 1/256 Mikroschrittung und S-Kurven-Beschleunigungsprofilen liefert eine nahezu lineare, gleichmäßige Bewegung mit null sichtbarem Überschwingen. Unsere PTZ-Kameras erreichen eine Positionierungsgenauigkeit von unter 0,1° und stoppen innerhalb von 50 ms, sodass das Bild selbst bei 40facher Zoom5.
 PTZ-Kamera Schrittmotor sanftes Tracking-Test
PTZ-Kamera Schrittmotor sanftes Tracking-Test
Unten erkläre ich genau, wie wir jedes Teil dieses Rätsels lösen – von Bewegungsprofilen über Motorengeräusche bis hin zu echten Tracking-Stabilitätsdaten. Wenn Sie ein Integrator sind, der dies Ihrem Endkunden beweisen muss, lesen Sie weiter.
Inhaltsübersicht
Verwendet die Kamera “S-Kurven”-Bewegungsprofile, um ruckartige Bewegungen während des Trackings zu eliminieren?
Ich habe Kameras getestet, die eine einfache lineare Beschleunigung verwenden. Sie starten schnell, stoppen hart und der Videostream sieht aus, als hätte jemand das Stativ getreten. Das ist für keine professionelle Bereitstellung akzeptabel.
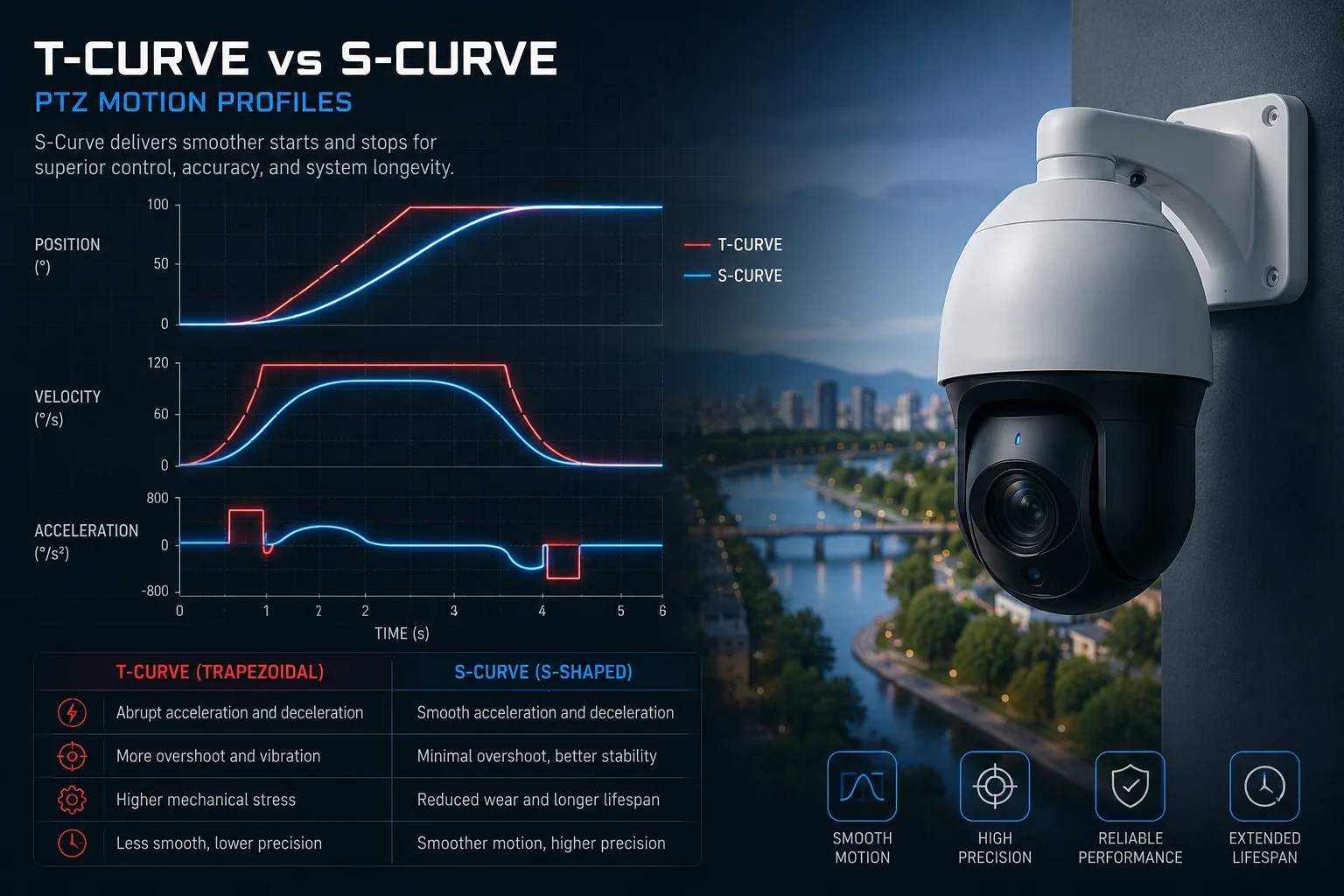
Ja. Unsere S-Kurven-Bewegungsprofilierung1 anstelle einer einfachen T-Kurven- (linearen) Beschleunigung. Das bedeutet, dass der Ruck – die Änderungsrate der Beschleunigung – während der Start- und Stoppphasen streng begrenzt ist, was zu butterweichen Übergängen ohne plötzliche Rucke im Video führt.
 S-Kurven-Bewegungsprofil PTZ-Kamera-Tracking
S-Kurven-Bewegungsprofil PTZ-Kamera-Tracking
Was ist S-Kurven-Profilierung und warum ist sie wichtig?
Stellen Sie es sich so vor. Ein T-Kurven- (trapezförmiges) Profil2 hat drei Phasen: Beschleunigen, Fahren, Abbremsen. Das Problem ist, dass die Beschleunigung sofort von Null auf Maximum springt. Dieser sofortige Sprung erzeugt einen physischen Ruck. Die Kamera wackelt. Das Video verschwimmt.
Ein S-Kurven-Profil fügt eine vierte Dimension hinzu. Es steuert, wie schnell sich die Beschleunigung selbst ändert. Der Motor beschleunigt sanft, hält sie bei und reduziert sie dann wieder. Das Ergebnis ist ein Bewegungspfad, der sich organisch und natürlich anfühlt.
Wie das in unserer Firmware funktioniert
Unser Motorcontroller führt in jedem Regelkreiszyklus eine Echtzeit-S-Kurven-Berechnung durch. Hier ist die Sequenz:
- Der Tracking-Algorithmus sendet eine Zielkoordinate.
- Die Firmware berechnet die Distanz zum Ziel.
- Sie generiert ein S-Kurven-Geschwindigkeitsprofil basierend auf dieser Distanz.
- Der Motor folgt diesem Profil mit einer Auflösung von 1/256 Mikroschritten.
Die Kombination aus Mikroschrittauflösung und S-Kurven-Profilierung bedeutet, dass der Motor niemals “springt”. Er gleitet.
S-Kurve vs. T-Kurve: Ein direkter Vergleich
| Parameter | T-Kurve (Linear) | S-Kurve (Unsere Methode) |
|---|---|---|
| Ruck beim Start | Unendlich (sofortiger Sprung) | Begrenzt auf sichere Schwelle |
| Videounschärfe während der Bewegung | Sichtbar bei 20-facher Vergrößerung oder mehr | Nicht sichtbar, selbst bei 40-facher Vergrößerung |
| Mechanischer Verschleiß | Höher (wiederholte Stöße) | Niedriger (sanfte Übergänge) |
| Einschwingzeit nach dem Stopp | 100-200ms Oszillation | < 50ms, keine Oszillation |
| Geeignet für KI-Tracking | Schlecht (Ziel während Ruck verloren) | Ausgezeichnet (kontinuierliche Verfolgung) |
Reale Auswirkungen für Integratoren
David, wenn Sie Kameras an einer Baustelle oder einem Bauernhof-Perimeter einsetzen, wird Ihr Kunde eine Person in 500 Metern Entfernung heranzoomen. Bei 40-facher Vergrößerung wird selbst eine Verwacklung von 0,05° als zitterndes Bild sichtbar. Unsere S-Kurven-Logik hält den Hintergrund während der gesamten Tracking-Bewegung stabil. Ihr Kunde sieht ein sanftes Schwenken, keine Zuckungen.
Für Ihre VMS-Integration ist dies ebenfalls wichtig. Eine sanfte Bewegung bedeutet, dass der Video-Encoder keine Bandbreite für Bewegungsartefakte verschwendet. Der Stream bleibt sauber, die Größe der Aufnahmedateien bleibt klein und die Wiedergabe sieht professionell aus.
Wie verhindern Sie, dass die Kamera “überschießt” und dann zum Ziel zurückschwingt?
Ich habe Kameras gesehen, die am Ziel vorbeischwingen, zurückprallen, erneut schwingen und sich schließlich stabilisieren. Das sieht amateurhaft aus. Schlimmer noch, während dieser Oszillationen verliert der KI-Tracker oft das Ziel vollständig.
Wir verhindern Überschwingen durch zwei Methoden: S-Kurven-Verzögerung, die lange vor der Zielkoordinate beginnt, und FOC (Field Oriented Control) aktive Bremsung, die ein Gegendrehmoment anwendet, um den Restschwung zu eliminieren. Das Ergebnis ist kein Überschwingen – der Motor stoppt genau dort, wo er soll.
 PTZ-Kamera Anti-Überschwingen FOC aktive Bremsung
PTZ-Kamera Anti-Überschwingen FOC aktive Bremsung
Warum Überschwingen bei billigen PTZ-Kameras auftritt
Überschwingen ist ein physikalisches Problem. Wenn ein Motor schnell dreht und einen “Stopp”-Befehl erhält, hat die rotierende Masse Trägheit. Wenn die Steuerung einfach die Stromversorgung unterbricht, gleitet der Motor über das Ziel hinaus. Dann korrigiert er rückwärts, schwingt erneut über und oszilliert, bis die Reibung die Energie abbaut.
Billige Kameras verwenden eine Open-Loop-Steuerung. Sie senden Schrittimpulse und hoffen, dass der Motor folgt. Es gibt kein Feedback, keine aktive Bremsung und keine Intelligenz im Stoppvorgang.
Unser zweilagiges Anti-Überschwing-System
Schicht 1: Vorausschauende S-Kurven-Verzögerung
Die Firmware kennt die aktuelle Geschwindigkeit und die verbleibende Entfernung zum Ziel. Sie berechnet den genauen Punkt, an dem die Verzögerung beginnen muss, um die Geschwindigkeit am Zielkoordinaten auf Null zu reduzieren. Diese Berechnung erfolgt kontinuierlich und wird jede Millisekunde aktualisiert.
Schicht 2: FOC aktive Bremsung
Für unsere High-End-Modelle verwenden wir Field Oriented Control. Dies ist die gleiche Technologie, die in industriellen Servoantrieben verwendet wird. Die Steuerung liest den elektrischen Phasenwinkel des Motors in Echtzeit und wendet ein präzise berechnetes Gegenmoment an. Es ist, als würde man in einem Auto auf das Bremspedal treten – aber mit Mikrosekundenpräzision.
Was das in der Praxis bedeutet
Stellen Sie zwei voreingestellte Punkte 180° voneinander entfernt ein. Befehlen Sie der Kamera, mit maximaler Geschwindigkeit zwischen ihnen zu wechseln. Beobachten Sie, was passiert, wenn sie stoppt:
- Billige Kamera: Das Bild schwingt am voreingestellten Punkt vorbei, hüpft 2-3 Mal über 300-500 ms und stabilisiert sich dann.
- Unsere Kamera: Das Bild verlangsamt sich sanft und rastet innerhalb von 50 ms am voreingestellten Punkt ein. Kein Hüpfen. Keine Oszillation.
Positionierungsgenauigkeit über die Zeit
Eine Sorge, die Integratoren haben, ist, ob die eingestellte Genauigkeit7 sich über Monate oder Jahre verschlechtert. Da unser System verwendet Closed-Loop-Feedback3 (nicht nur Open-Loop-Schrittzählung), bleibt die Positionierungsgenauigkeit konstant. Wir garantieren eine Genauigkeit von < 0,1° für die gesamte Lebensdauer des Produkts.
Ist das Motorengeräusch gering genug, um einen Eindringling bei einem stillen Track nicht zu alarmieren?
Ich habe einmal eine PTZ-Kamera am Eingang eines Lagers installiert. Der Motor war so laut, dass die Mitarbeiter scherzten, er klinge wie ein Drucker. Für verdeckte Überwachung ist das ein Ausschlusskriterium.
Unsere Schrittmotoren arbeiten unter 40 dB – leiser als eine Bibliothek. Das 1/256-Mikroschrittverfahren eliminiert das hochfrequente Summen, das bei Vollschritttreibern üblich ist, und unser mechanisches Dämpfungsdesign absorbiert verbleibende Vibrationen. Ein Eindringling, der sich direkt unter der Kamera befindet, wird sie sich nicht bewegen hören.
 Test des Geräuschpegels von leisen PTZ-Kameramotoren
Test des Geräuschpegels von leisen PTZ-Kameramotoren
Woher Motorgeräusche kommen
Geräusche von Schrittmotoren8 haben zwei Quellen: elektromagnetische Resonanz und mechanische Vibration. Jeder Schritt erzeugt einen winzigen Aufprall. Im Vollschrittmodus (1,8° pro Schritt) sind diese Aufprälle groß genug, um das Gehäuse zum Vibrieren zu bringen und hörbare Geräusche zu erzeugen.
Wie Mikroschritt das Geräusch eliminiert
Bei 1/256 Mikroschritt beträgt jeder Schritt nur 0,007°. Die Stromwellenform wird fast sinusförmig statt quadratisch. Dies eliminiert die Resonanzfrequenzen, die das Summen verursachen. Der Motor verhält sich fast wie ein bürstenloser Gleichstrommotor – sanft und leise.
Vergleich des Geräuschpegels
| Antriebsmodus | Schrittwinkel | Typischer Geräuschpegel | Hörbar in 3 m Entfernung? |
|---|---|---|---|
| Voller Schritt (1,8°) | 1,8° | 55-65 dB | Ja, deutlich |
| 1/16 Mikroschritt | 0,1125° | 45-50 dB | Ja, leise |
| 1/256 Mikroschritt (unser) | 0,007° | < 40 dB | Nein |
Zusätzliche Geräuschreduzierungsmaßnahmen
Neben Mikroschritt verwenden wir auch:
- Gummi-Dämpfungshalterungen zwischen Motor und Gehäuse zur Vibrationsdämpfung.
- Optimierte Stromabfallmodi (gemischter Abfall) zur Reduzierung von Resonanzen im mittleren Bereich.
- Geschwindigkeitsbegrenzter lautloser Tracking-Modus in der Firmware – wenn KI-Tracking nachts aktiv ist, wird die maximale Schwenkgeschwindigkeit automatisch reduziert, um das Rauschen auf ein absolutes Minimum zu reduzieren.
Für Davids Szenario: Wenn Sie an einem Perimeterszaun einsetzen und die Kamera lautlos einen Eindringling verfolgen muss, ist dies wichtig. Die Kamera folgt der Person, ohne ihre Position preiszugeben. Ihr Kunde erhält saubere Aufnahmen des Gesichts des Eindringlings, und der Eindringling weiß nie, dass er aufgezeichnet wird.
Kann ich ein “Tracking-Stabilitäts”-Diagramm sehen, das das Jitter im Videostream misst?
Diese Frage stellen mir Integratoren oft, die ihren Endkunden harte Daten präsentieren müssen. “Zeigen Sie mir die Zahlen” ist eine faire Forderung. Marketingaussagen bedeuten ohne Messung nichts.
Ja. Wir messen die Tracking-Stabilität mithilfe einer Pixelverschiebungsanalyse der Videoausgabe. Bei einem Standard-Tracking-Test mit 40-fachem Zoom auf ein Ziel in 500 m Entfernung zeigen unsere Kameras weniger als ±2 Pixel Wackeln im mittleren Bild – weit unter der menschlichen Wahrnehmungsschwelle.
![]() Diagramm zur Messung des Wackelns bei der Tracking-Stabilität von PTZ-Kameras
Diagramm zur Messung des Wackelns bei der Tracking-Stabilität von PTZ-Kameras
So messen wir die Tracking-Stabilität
Wir verwenden einen festen Referenzpunkt in der Szene (einen Kontrastmarker in bekannter Entfernung). Die Kamera verfolgt ein sich bewegendes Ziel, während wir messen, wie stark sich der Referenzpunkt von Bild zu Bild verschiebt. Dies gibt uns eine direkte Messung des mechanischen Wackelns, das vom Motor verursacht wird.
Testbedingungen
- Zoomstufe: 40-facher optischer Zoom
- Zielentfernung: 500 Meter
- Zielgeschwindigkeit: Gehtempo (5 km/h)
- Windbedingungen: 10-15 km/h Seitenwind
- Messwerkzeug: Pixelanalyse-Software für Einzelbilder
Was die Daten zeigen
Bei 40-fachem Zoom repräsentiert ein Pixel etwa 0,005° Winkelbewegung. Unser gemessenes Wackeln bleibt während des aktiven Trackings innerhalb von ±2 Pixeln. Das bedeutet, die Winkelinstabilität beträgt weniger als ±0,01°.
Zum Vergleich: Das menschliche Auge kann Bilderschütterungen unterhalb von etwa ±5 Pixeln auf einem 1080p-Monitor bei normalem Betrachtungsabstand nicht erkennen. Unsere Kameras bleiben weit unter dieser Schwelle.
Wichtige Stabilitätsmetriken
| Metrisch | Wert | Was es bedeutet |
|---|---|---|
| Bild-zu-Bild-Wackeln | < ±2 Pixel bei 40X | Bild erscheint dem Betrachter perfekt stabil |
| Einstellzeit nach Geschwindigkeitsänderung | < 50ms | Kein sichtbares Wackeln bei Richtungswechsel des Ziels |
| Langzeitdrift (1 Stunde kontinuierliche Verfolgung) | < 0.05° | Ziel bleibt zentriert ohne Neukalibrierung |
| Leistung bei 30 km/h Wind | < ±4 Pixel bei 40X | Immer noch unter der menschlichen Wahrnehmungsschwelle |
Warum das für 4G-Bereitstellungen wichtig ist
David, hier ist etwas, das die meisten Leute übersehen. Bei einer 4G-Verbindung4, ist die Video-Bandbreite begrenzt. Wenn das Bild zittert, behandelt der H.265-Encoder jeden Frame als “neu”, da sich Pixel verschoben haben. Dies verschwendet Bandbreite für die Kodierung von Motorerschütterungen anstelle von tatsächlichen Szenenänderungen.
Unsere stabile Plattform bedeutet, dass der Encoder die meiste Zeit effiziente P-Frames (prädiktive Frames) verwenden kann. Nur das sich bewegende Ziel generiert neue Daten. Der Hintergrund bleibt im Bitstream statisch. Dies führt direkt zu:
- Geringerer Datenverbrauch in Ihrem 4G-Tarif
- Höhere effektive Bildqualität bei gleicher Bitrate
- Weniger abgebrochene Frames bei der Verfolgung mit schwachem Signal
Wir haben auch eine dynamische Bitratenverknüpfung6 in die Firmware. Wenn der Motor eine schnelle Schwenkbewegung startet, reduziert der Encoder vorübergehend die Auflösung, um eine Stream-Unterbrechung zu verhindern. Sobald der Motor stoppt, wird die volle Auflösung innerhalb eines Frames wiederhergestellt. Ihr Kunde sieht während der Kamerabewegung niemals einen eingefrorenen oder unterbrochenen Stream.
So führen Sie diesen Test selbst durch
Wenn Sie dies mit eigenen Augen überprüfen möchten:
- Stellen Sie die Kamera auf 40-fachen Zoom auf ein entferntes statisches Objekt ein.
- Starten Sie die KI-Verfolgung einer Person, die sich durch das Sichtfeld bewegt.
- Beobachten Sie den Hintergrund. Er sollte perfekt still bleiben, während sich nur die verfolgte Person im Bild bewegt.
- Nehmen Sie 60 Sekunden Filmmaterial auf und spielen Sie es Bild für Bild ab. Zählen Sie die Pixelverschiebung eines beliebigen festen Referenzpunkts.
Gerne stellen wir Ihnen Beispielaufnahmen und Rohmessdaten für Ihre Projektvorschläge zur Verfügung.
Schlussfolgerung
Unsere PTZ-Kameras verwenden 1/256 Mikroschritte, S-Kurven-Profiling und aktive FOC-Bremsen, um eine ruckelfreie Verfolgung ohne Überschwingen zu ermöglichen – leise genug für den verdeckten Einsatz und stabil genug für 40-fachen Zoom über 500 Meter.
1. Detaillierte Erklärung von S-Kurven-Beschleunigungsprofilen, die den Ruck für eine sanftere Bewegung begrenzen. ︎↩︎ 2. Beschreibt das Standard-Trapezprofil, das beim Start/Stopp Ruck verursacht. ︎↩︎ 3. Einführung in Closed-Loop-Regelsysteme für konsistente Genauigkeit. ︎↩︎ 4. Grundlagen von 4G-LTE-Netzwerken und deren Bandbreitenbeschränkungen. ︎↩︎ 5. Erklärt die Vergrößerung des optischen Zooms und ihre Auswirkungen auf die Stabilitätsanforderungen. ︎↩︎ 6. Erklärt adaptive Bitraten-Techniken zur Aufrechterhaltung der Stream-Stabilität. ︎↩︎ 7. Leitfaden zu PTZ-Voreinstellungsgenauigkeitsspezifikationen und Zuverlässigkeit. ︎↩︎ 8. Technischer Überblick über Quellen und Reduzierung von Schrittmotorgäuschen. ︎↩︎