
لقد شاهدت الكثير من كاميرات PTZ تهتز مثل يد متوترة أثناء التتبع. الفيديو يبدو فظيعًا، والعملاء يشتكون، والمشروع بأكمله يفقد مصداقيته.
محرك خطوة مضبوط جيدًا مع تقسيم دقيق بمقدار 1/256 وملفات تعريف تسارع منحنى S يوفر حركة سلسة شبه خطية مع عدم وجود تجاوز مرئي للهدف. تحقق كاميرات PTZ الخاصة بنا دقة تحديد موضع أقل من 0.1 درجة وتتوقف في غضون 50 مللي ثانية، لذلك تظل الصورة ثابتة تمامًا حتى عند تكبير/تقريب 40X5.
 اختبار تتبع سلس لمحرك الخطوات في كاميرا PTZ
اختبار تتبع سلس لمحرك الخطوات في كاميرا PTZ
أدناه، سأوضح بالتفصيل كيف نحل كل جزء من هذه الألغاز - من ملفات تعريف الحركة إلى ضوضاء المحرك إلى بيانات استقرار التتبع الفعلية. إذا كنت مُدمجًا تحتاج إلى إثبات ذلك لعميلك النهائي، فاستمر في القراءة.
جدول المحتويات
هل تستخدم الكاميرا ملفات تعريف حركة “منحنى S” للقضاء على الحركات المفاجئة أثناء التتبع؟
لقد اختبرت كاميرات تستخدم تسارعًا خطيًا أساسيًا. تبدأ بسرعة، وتتوقف بقوة، ويبدو بث الفيديو وكأن شخصًا ما ركل الحامل ثلاثي القوائم. هذا غير مقبول لأي نشر احترافي.
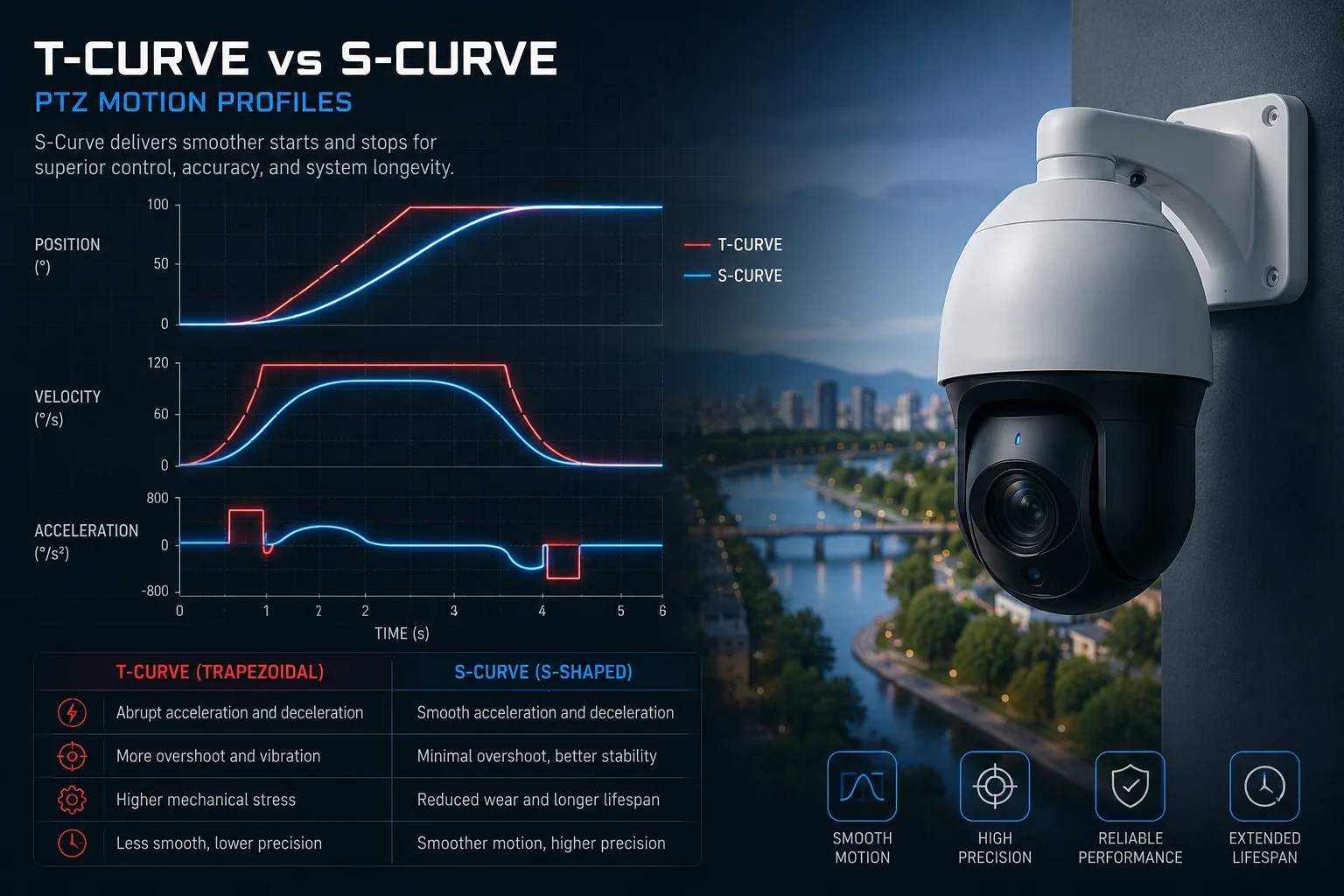
نعم. ملفات تعريف حركة منحنى S1 بدلاً من التسارع البسيط بمنحنى T (خطي). هذا يعني أن الارتجاج - معدل تغير التسارع - محدود بشكل صارم أثناء مراحل البدء والتوقف، مما ينتج عنه انتقالات سلسة للغاية دون أي اهتزازات مفاجئة في الفيديو.
 تتبع كاميرا PTZ بملف تعريف حركة منحنى S
تتبع كاميرا PTZ بملف تعريف حركة منحنى S
ما هو ملف تعريف منحنى S ولماذا هو مهم؟
فكر في الأمر بهذه الطريقة. ملف تعريف منحنى T (شبه منحرف)2 له ثلاث مراحل: تسريع، إبحار، تباطؤ. المشكلة هي أن التسارع يقفز من الصفر إلى الحد الأقصى على الفور. هذا القفز الفوري يخلق اهتزازًا جسديًا. تهتز الكاميرا. يطمس الفيديو.
يضيف ملف تعريف منحنى S بُعدًا رابعًا. يتحكم في سرعة تغير التسارع نفسه. يخفف المحرك من التسارع، ويحافظ عليه، ثم يخفف منه. النتيجة هي مسار حركة يبدو عضويًا وطبيعيًا.
كيف يعمل هذا في البرنامج الثابت الخاص بنا
تعمل وحدة التحكم في المحرك الخاصة بنا على حساب منحنى S في الوقت الفعلي في كل دورة تحكم. إليك التسلسل:
- ترسل خوارزمية التتبع إحداثيات الهدف.
- يحسب البرنامج الثابت المسافة إلى الهدف.
- يقوم بإنشاء ملف تعريف سرعة منحنى S بناءً على تلك المسافة.
- يتبع المحرك هذا الملف الشخصي بدقة 1/256 خطوة دقيقة.
يعني الجمع بين الخطوات الدقيقة وتوصيف منحنى S أن المحرك لا “يقفز” أبدًا. إنه ينزلق.
منحنى S مقابل منحنى T: مقارنة مباشرة
| المعلمة | منحنى T (خطي) | منحنى S (طريقتنا) |
|---|---|---|
| اهتزاز عند البدء | لا نهائي (قفزة فورية) | محدود بعتبة آمنة |
| ضبابية الفيديو أثناء الحركة | مرئي عند تكبير 20X+ | غير مرئي حتى عند تكبير 40X |
| تآكل ميكانيكي | أعلى (صدمات متكررة) | أقل (انتقالات سلسة) |
| وقت الاستقرار بعد التوقف | تذبذب 100-200 مللي ثانية | أقل من 50 مللي ثانية، لا تذبذب |
| مناسب لتتبع الذكاء الاصطناعي | ضعيف (فقدان الهدف أثناء الاهتزاز) | ممتاز (قفل مستمر) |
تأثير حقيقي للمدمجين
ديفيد، إذا كنت تنشر كاميرات في موقع بناء أو محيط مزرعة، فسوف يقوم عميلك بتكبير شخص على بعد 500 متر. عند تكبير 40X، حتى 0.05 درجة من الاهتزاز تصبح مرئية كصورة مهتزة. منطق المنحنى S الخاص بنا يحافظ على استقرار الخلفية أثناء حركة التتبع بأكملها. يرى عميلك حركة بانسيابية، وليس تشنجًا.
بالنسبة لتكامل VMS الخاص بك، هذا مهم أيضًا. الحركة السلسة تعني أن مشفر الفيديو لا يهدر عرض النطاق الترددي على تشوهات الحركة. يظل البث نظيفًا، ويبقى حجم ملف التسجيل صغيرًا، ويبدو التشغيل احترافيًا.
كيف تمنع الكاميرا من “تجاوز الهدف” ثم التذبذب مرة أخرى نحو الهدف؟
لقد رأيت كاميرات تتجاوز الهدف، وترتد للخلف، وتتأرجح مرة أخرى، وأخيرًا تستقر. يبدو الأمر غير احترافي. والأسوأ من ذلك، خلال هذه التذبذبات، غالبًا ما يفقد متتبع الذكاء الاصطناعي الهدف تمامًا.
نمنع التجاوز من خلال طريقتين: تباطؤ المنحنى S الذي يبدأ قبل إحداثيات الهدف بوقت طويل، والكبح النشط FOC (التحكم الموجه بالمجال) الذي يطبق عزم دوران معاكس لقتل الزخم المتبقي. النتيجة هي صفر ارتداد - يتوقف المحرك بالضبط حيث يجب.
 كاميرا PTZ ضد التجاوز كبح نشط FOC
كاميرا PTZ ضد التجاوز كبح نشط FOC
لماذا يحدث التجاوز في كاميرات PTZ الرخيصة
التجاوز مشكلة فيزيائية. عندما يدور المحرك بسرعة ويتلقى أمر “توقف”، فإن الكتلة الدوارة لها القصور الذاتي. إذا قام المتحكم ببساطة بقطع الطاقة، فإن المحرك ينزلق past الهدف. ثم يصحح للخلف، ويتجاوز مرة أخرى، ويتذبذب حتى يقتل الاحتكاك الطاقة.
تستخدم الكاميرات الرخيصة التحكم الحلقي المفتوح. يرسلون نبضات خطوة ويأملون أن يتبع المحرك. لا يوجد ردود فعل، ولا كبح نشط، ولا ذكاء في تسلسل التوقف.
نظامنا المزدوج ضد التجاوز
الطبقة 1: تباطؤ المنحنى S التنبؤي
يعرف البرنامج الثابت السرعة الحالية والمسافة المتبقية إلى الهدف. يحسب النقطة الدقيقة التي يجب أن يبدأ فيها التباطؤ للوصول إلى سرعة صفر عند إحداثيات الهدف. تتم هذه الحسابات باستمرار، ويتم تحديثها كل ميللي ثانية.
الطبقة 2: كبح نشط FOC
بالنسبة لطرازاتنا المتطورة، نستخدم التحكم الموجه بالمجال. هذه هي نفس التقنية المستخدمة في محركات السيرفو الصناعية. يقرأ المتحكم زاوية الطور الكهربائي للمحرك في الوقت الفعلي ويطبق عزم دوران عكسي محسوب بدقة. إنه مثل الضغط على دواسة الفرامل في السيارة - ولكن بدقة الميكروثانية.
ما يبدو عليه هذا في الممارسة العملية
قم بتعيين نقطتين مسبقًا متباعدتين بزاوية 180 درجة. قم بقيادة الكاميرا للتبديل بينهما بأقصى سرعة. شاهد ما يحدث عند التوقف:
- كاميرا رخيصة: تتأرجح الصورة وتتجاوز الإعداد المسبق، وترتد 2-3 مرات خلال 300-500 مللي ثانية، ثم تستقر.
- كاميرتنا: تتباطأ الصورة بسلاسة وتستقر على الإعداد المسبق في غضون 50 مللي ثانية. لا ارتداد. لا تذبذب.
دقة تحديد المواقع بمرور الوقت
أحد المخاوف التي لدى المدمجين هو ما إذا كانت دقة الضبط المسبق7 تتدهور على مدى أشهر أو سنوات. لأن نظامنا يستخدم التغذية الراجعة ذات الحلقة المغلقة3 (وليس مجرد عد الخطوات في حلقة مفتوحة)، تظل دقة تحديد المواقع ثابتة. نضمن دقة < 0.1 درجة طوال عمر المنتج.
هل ضوضاء المحرك منخفضة بما يكفي لتجنب تنبيه متسلل أثناء تتبع صامت؟
قمت ذات مرة بتركيب كاميرا PTZ عند مدخل مستودع. كان المحرك صاخبًا لدرجة أن الموظفين مازحوا قائلين إنه يشبه صوت طابعة. للمراقبة السرية، هذا أمر غير مقبول.
تعمل محركات الخطوات لدينا بأقل من 40 ديسيبل - أهدأ من المكتبة. يلغي التقسيم الدقيق 1/256 الضوضاء العالية الشائعة في مشغلات الخطوات الكاملة، ويقوم تصميم التخميد الميكانيكي لدينا بامتصاص الاهتزازات المتبقية. لن يسمع المتسلل الواقف مباشرة أسفل الكاميرا حركتها.
 اختبار مستوى ضوضاء محرك كاميرا PTZ الصامت
اختبار مستوى ضوضاء محرك كاميرا PTZ الصامت
من أين تأتي ضوضاء المحرك
ضوضاء محرك الخطوات8 لها مصدران: الرنين الكهرومغناطيسي والاهتزاز الميكانيكي. كل خطوة تخلق تأثيرًا صغيرًا. في وضع الخطوة الكاملة (1.8 درجة لكل خطوة)، تكون هذه التأثيرات كبيرة بما يكفي لاهتزاز الهيكل وإنتاج ضوضاء مسموعة.
كيف يقتل التقسيم الدقيق الضوضاء
عند التقسيم الدقيق 1/256، تكون كل خطوة 0.007 درجة فقط. يصبح شكل موجة التيار شبه جيبي بدلاً من مربع. هذا يلغي ترددات الرنين التي تسبب الضوضاء. يتصرف المحرك تقريبًا مثل محرك تيار مستمر بدون فرش - سلس وهادئ.
مقارنة مستوى الضوضاء
| وضع القيادة | زاوية الخطوة | مستوى الضوضاء النموذجي | مسموع على بعد 3 أمتار؟ |
|---|---|---|---|
| خطوة كاملة (1.8 درجة) | 1.8 درجة | 55-65 ديسيبل | نعم، بوضوح |
| 1/16 خطوة دقيقة | 0.1125 درجة | 45-50 ديسيبل | نعم، بخفوت |
| 1/256 خطوة دقيقة (لدينا) | 0.007 درجة | أقل من 40 ديسيبل | لا يوجد |
تدابير إضافية لتقليل الضوضاء
بالإضافة إلى الخطوات الدقيقة، نستخدم أيضًا:
- حوامل تخميد مطاطية بين المحرك والغلاف لامتصاص الاهتزازات.
- أوضاع تحلل التيار المحسّنة (تحلل مختلط) لتقليل الرنين في المدى المتوسط.
- وضع تتبع صامت محدود السرعة في البرامج الثابتة - عند تنشيط تتبع الذكاء الاصطناعي ليلاً، يتم تقليل سرعة التحريك القصوى تلقائيًا للحفاظ على الضوضاء عند الحد الأدنى المطلق.
لسيناريو ديفيد: إذا كنت تنشر الكاميرا على سياج محيط وتحتاج الكاميرا إلى تتبع متسلل بصمت، فهذا مهم. تتبع الكاميرا الشخص دون الكشف عن موقعه. يحصل عميلك على لقطات واضحة لوجه المتسلل، ولا يعرف المتسلل أبدًا أنه يتم تسجيله.
هل يمكنني رؤية مخطط “استقرار التتبع” الذي يقيس الاهتزاز في بث الفيديو؟
أتلقى هذا السؤال كثيرًا من المدمجين الذين يحتاجون إلى تقديم بيانات قوية لعملائهم النهائيين. “أرني الأرقام” هو طلب عادل. الادعاءات التسويقية لا تعني شيئًا بدون قياس.
نعم. نقيس استقرار التتبع باستخدام تحليل إزاحة البكسل على مخرجات الفيديو. أثناء اختبار تتبع قياسي بتقريب 40X لهدف على بعد 500 متر، تُظهر كاميراتنا أقل من ±2 بكسل من الاهتزاز في الإطار المركزي - وهو أقل بكثير من عتبة الإدراك البشري.
![]() مخطط قياس اهتزاز استقرار تتبع كاميرا PTZ
مخطط قياس اهتزاز استقرار تتبع كاميرا PTZ
كيف نقيس استقرار التتبع
نستخدم نقطة مرجعية ثابتة في المشهد (علامة عالية التباين على مسافة معروفة). تتتبع الكاميرا هدفًا متحركًا بينما نقيس مقدار تحول النقطة المرجعية من إطار إلى آخر. يمنحنا هذا قياسًا مباشرًا للاهتزاز الميكانيكي الذي أدخلته المحركات.
شروط الاختبار
- مستوى التقريب: تقريب بصري 40X
- مسافة الهدف: 500 متر
- سرعة الهدف: سرعة المشي (5 كم/ساعة)
- ظروف الرياح: رياح جانبية بسرعة 10-15 كم/ساعة
- أداة القياس: برنامج تحليل البكسل إطارًا بإطار
ما تُظهره البيانات
عند تقريب 40X، يمثل البكسل الواحد ما يقرب من 0.005 درجة من الحركة الزاوية. يظل الاهتزاز المقاس لدينا في حدود ±2 بكسل أثناء التتبع النشط. هذا يعني أن عدم الاستقرار الزاوي أقل من ±0.01 درجة.
للمقارنة، لا تستطيع العين البشرية اكتشاف اهتزاز الصورة أقل من حوالي ±5 بكسل على شاشة بدقة 1080p عند النظر إليها من مسافة عادية. تظل كاميراتنا أقل بكثير من هذا الحد.
مقاييس الاستقرار الرئيسية
| متري | القيمة | ماذا يعني ذلك |
|---|---|---|
| اهتزاز إطار بإطار | < ±2 بكسل عند 40X | تظهر الصورة مستقرة تمامًا للمشاهد |
| وقت الاستقرار بعد تغيير السرعة | < 50 مللي ثانية | لا يوجد اهتزاز مرئي عند تغيير اتجاه الهدف |
| الانجراف طويل الأمد (تتبع مستمر لمدة ساعة) | < 0.05° | يبقى الهدف في المنتصف دون إعادة معايرة |
| الأداء في رياح بسرعة 30 كم/ساعة | < ±4 بكسل عند 40X | لا يزال أقل من عتبة الإدراك البشري |
لماذا هذا مهم لنشر شبكات الجيل الرابع (4G)
ديفيد، إليك شيء يغفل عنه معظم الناس. على اتصال الجيل الرابع (4G)4, ، عرض النطاق الترددي للفيديو محدود. عندما تهتز الصورة، يعامل مُرمّز H.265 كل إطار على أنه “جديد” لأن البكسلات تحركت. هذا يهدر عرض النطاق الترددي على ترميز اهتزاز المحرك بدلاً من تغييرات المشهد الفعلية.
منصتنا المستقرة تعني أن المُرمّز يمكنه استخدام إطارات P (الإطارات التنبؤية) الفعالة في معظم الأوقات. الهدف المتحرك فقط يولد بيانات جديدة. الخلفية تظل ثابتة في مجرى البت. هذا يترجم مباشرة إلى:
- استهلاك بيانات أقل على خطة الجيل الرابع (4G) الخاصة بك
- جودة صورة فعالة أعلى بنفس معدل البت
- عدد أقل من الإطارات المتساقطة أثناء التتبع على إشارة ضعيفة
لقد قمنا أيضًا ببناء ربط ديناميكي لمعدل البت6 في البرامج الثابتة. عندما تبدأ الكاميرا حركة بان سريعة، يقلل المشفر الدقة مؤقتًا لمنع انقطاع البث. بمجرد توقف المحرك، تعود الدقة الكاملة في غضون إطار واحد. لا يرى عميلك أبدًا بثًا مجمدًا أو متقطعًا أثناء حركة الكاميرا.
كيفية تشغيل هذا الاختبار بنفسك
إذا كنت ترغب في التحقق من ذلك بنفسك:
- اضبط الكاميرا على تقريب 40X على جسم ثابت بعيد.
- ابدأ التتبع بالذكاء الاصطناعي لشخص يمشي عبر مجال الرؤية.
- راقب الخلفية. يجب أن تظل ثابتة تمامًا بينما يتحرك فقط الشخص المتتبع في الإطار.
- سجل 60 ثانية من اللقطات وقم بتشغيلها إطارًا بإطار. احسب إزاحة البكسل لأي نقطة مرجعية ثابتة.
يسعدنا تقديم لقطات نموذجية وبيانات قياس خام لمقترحات مشاريعك.
الخاتمة
تستخدم كاميرات PTZ الخاصة بنا تقنية التقطيع الدقيق 1/256، وملفات تعريف S-Curve، والكبح النشط FOC لتقديم تتبع خالٍ من الاهتزاز مع تجاوز صفري - هادئ بما يكفي للاستخدام السري ومستقر بما يكفي لتقريب 40X على مسافة 500 متر.
1. شرح مفصل لملفات تسريع S-curve التي تحد من الارتجاج لحركة أكثر سلاسة. ︎↩︎ 2. يصف ملف تعريف الحركة شبه المنحرف القياسي الذي يسبب الارتجاج عند البدء/التوقف. ︎↩︎ 3. مقدمة لأنظمة التحكم ذات الحلقة المغلقة للدقة المتسقة. ︎↩︎ 4. أساسيات شبكات 4G LTE وقيود عرض النطاق الترددي الخاصة بها. ︎↩︎ 5. يشرح تكبير التقريب البصري وتأثيره على متطلبات الاستقرار. ︎↩︎ 6. يشرح تقنيات معدل البت التكيفي المستخدمة للحفاظ على استقرار البث. ︎↩︎ 7. دليل لمواصفات دقة إعدادات PTZ المسبقة وموثوقيتها. ︎↩︎ 8. نظرة عامة فنية على مصادر وضوضاء محرك الخطوات وتقليلها. ︎↩︎