
He visto demasiadas cámaras PTZ temblar como una mano nerviosa durante el seguimiento. El video se ve terrible, los clientes se quejan y todo el proyecto pierde credibilidad.
Un motor paso a paso bien ajustado con micropasos de 1/256 y perfiles de aceleración de curva S ofrece un movimiento suave casi lineal con cero sobreimpulso visible. Nuestras cámaras PTZ logran una precisión de posicionamiento inferior a 0.1° y se detienen en 50 ms, por lo que la imagen permanece perfectamente estable incluso en Zoom 40X5.
 Prueba de seguimiento suave del motor paso a paso de la cámara PTZ
Prueba de seguimiento suave del motor paso a paso de la cámara PTZ
A continuación, detallo exactamente cómo resolvemos cada pieza de este rompecabezas, desde los perfiles de movimiento hasta el ruido del motor y los datos reales de estabilidad de seguimiento. Si usted es un integrador que necesita demostrar esto a su cliente final, siga leyendo.
Índice
¿Utiliza la cámara perfiles de movimiento “Curva S” para eliminar movimientos bruscos durante el seguimiento?
He probado cámaras que utilizan aceleración lineal básica. Empiezan rápido, se detienen bruscamente y la señal de video parece que alguien pateó el trípode. Eso no es aceptable para ninguna implementación profesional.
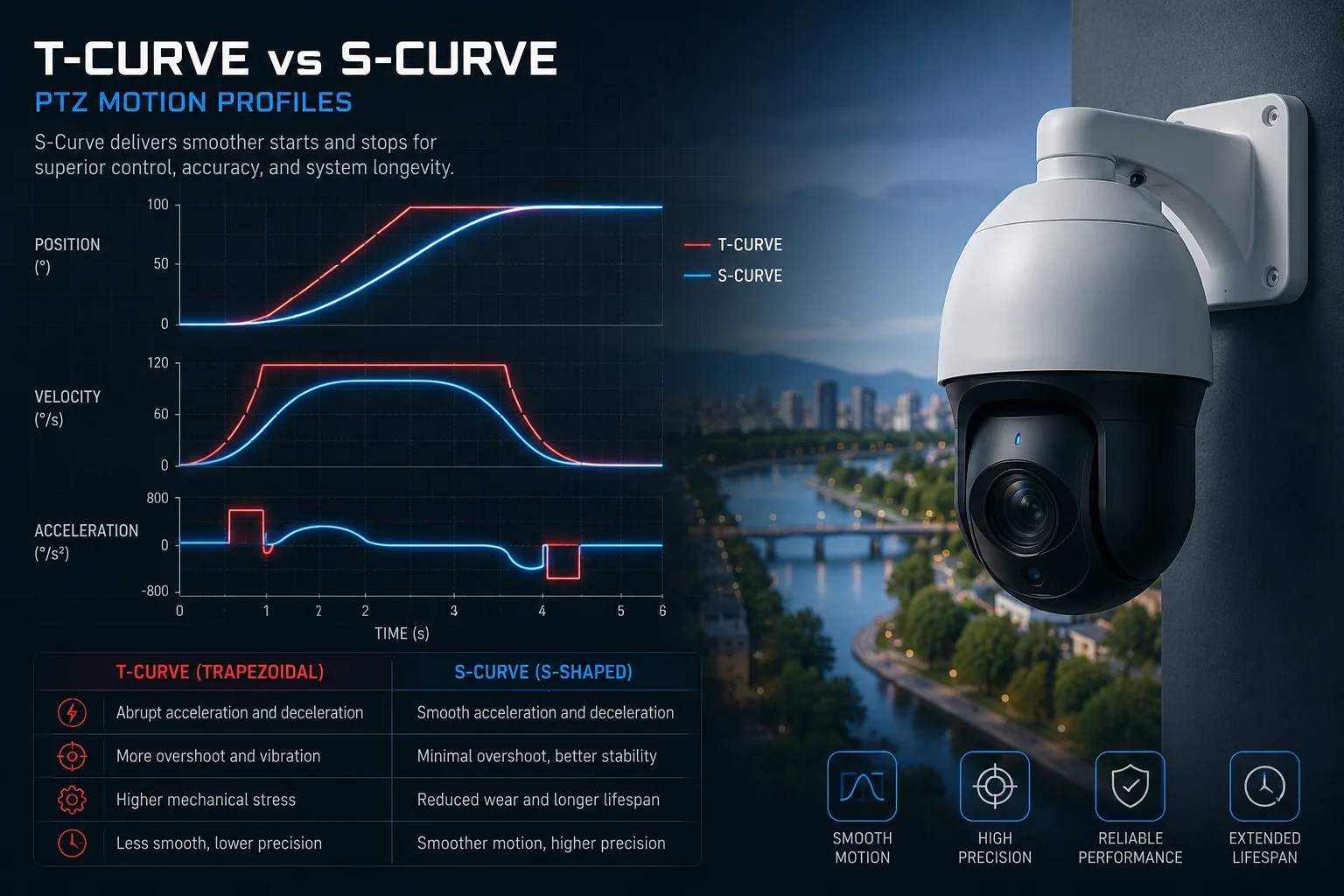
Sí. Nuestro perfilado de movimiento de curva S1 en lugar de la simple aceleración de Curva T (lineal). Esto significa que el tirón, la tasa de cambio de la aceleración, se limita estrictamente durante las fases de inicio y parada, produciendo transiciones increíblemente suaves sin sacudidas repentinas en el video.
 Seguimiento de cámara PTZ con perfil de movimiento de curva S
Seguimiento de cámara PTZ con perfil de movimiento de curva S
¿Qué es el perfilado de Curva S y por qué es importante?
Piénselo de esta manera. Un perfil de Curva T (trapezoidal)2 tiene tres fases: acelerar, mantener velocidad, desacelerar. El problema es que la aceleración salta de cero a máximo instantáneamente. Ese salto instantáneo crea un tirón físico. La cámara tiembla. El video se desenfoca.
Un perfil de Curva S agrega una cuarta dimensión. Controla qué tan rápido cambia la aceleración en sí. El motor acelera gradualmente, la mantiene y luego la reduce gradualmente. El resultado es una trayectoria de movimiento que se siente orgánica y natural.
Cómo funciona esto en nuestro firmware
Nuestro controlador de motor ejecuta un cálculo de curva S en tiempo real en cada ciclo de bucle de control. Aquí está la secuencia:
- El algoritmo de seguimiento envía una coordenada objetivo.
- El firmware calcula la distancia al objetivo.
- Genera un perfil de velocidad de curva S basado en esa distancia.
- El motor sigue este perfil con una resolución de micro-paso de 1/256.
La combinación de micro-pasos y perfilado de curva S significa que el motor nunca “salta”. Se desliza.
Curva S vs. Curva T: Una Comparación Directa
| Parámetro | Curva T (Lineal) | Curva S (Nuestro Método) |
|---|---|---|
| Sacudida al inicio | Infinito (salto instantáneo) | Limitado a un umbral seguro |
| Desenfoque de video durante el movimiento | Visible con zoom 20X+ | No visible incluso con 40X |
| Desgaste mecánico | Mayor (impactos repetidos) | Menor (transiciones suaves) |
| Tiempo de asentamiento después de la parada | Oscilación de 100-200 ms | < 50ms, sin oscilación |
| Adecuado para seguimiento de IA | Pobre (objetivo perdido durante sacudida) | Excelente (bloqueo continuo) |
Impacto en el mundo real para integradores
David, si estás desplegando cámaras en un sitio de construcción o en el perímetro de una granja, tu cliente hará zoom en una persona a 500 metros de distancia. A 40X, incluso 0.05° de vibración se vuelven visibles como una imagen temblorosa. Nuestra lógica S-Curve mantiene el fondo estable durante todo el movimiento de seguimiento. Tu cliente ve un paneo suave, no una convulsión.
Para tu integración VMS, esto también importa. El movimiento suave significa que el codificador de video no desperdicia ancho de banda en artefactos de movimiento. El flujo se mantiene limpio, el tamaño del archivo de grabación se mantiene pequeño y la reproducción se ve profesional.
¿Cómo evita que la cámara “sobrepase” y luego oscile de regreso al objetivo?
He visto cámaras que pasan de largo el objetivo, rebotan, vuelven a pasar y finalmente se asientan. Parece amateur. Peor aún, durante esas oscilaciones, el rastreador de IA a menudo pierde el objetivo por completo.
Evitamos el sobreimpulso mediante dos métodos: desaceleración S-Curve que comienza mucho antes de la coordenada objetivo, y frenado activo FOC (Control Orientado al Campo) que aplica un par de torsión opuesto para eliminar el impulso residual. El resultado es cero rebote: el motor se detiene exactamente donde debería.
 Frenado activo FOC anti-sobreimpulso de cámara PTZ
Frenado activo FOC anti-sobreimpulso de cámara PTZ
Por qué ocurre el sobreimpulso en cámaras PTZ baratas
El sobreimpulso es un problema de física. Cuando un motor gira rápido y recibe un comando de “parada”, la masa giratoria tiene inercia. Si el controlador simplemente corta la energía, el motor se desliza más allá del objetivo. Luego corrige hacia atrás, se sobreimpulsa de nuevo y oscila hasta que la fricción elimina la energía.
Las cámaras baratas usan control de bucle abierto. Envían pulsos de paso y esperan que el motor siga. No hay retroalimentación, ni frenado activo, ni inteligencia en la secuencia de parada.
Nuestro sistema anti-sobreimpulso de doble capa
Capa 1: Desaceleración predictiva S-Curve
El firmware conoce la velocidad actual y la distancia restante al objetivo. Calcula el punto exacto donde la desaceleración debe comenzar para alcanzar velocidad cero en la coordenada objetivo. Este cálculo se realiza continuamente, actualizándose cada milisegundo.
Capa 2: Frenado activo FOC
Para nuestros modelos de gama alta, utilizamos Control Orientado al Campo. Esta es la misma tecnología utilizada en los servomotores industriales. El controlador lee el ángulo de fase eléctrico del motor en tiempo real y aplica un par de torsión inverso calculado con precisión. Es como pisar el pedal del freno en un coche, pero con precisión de microsegundos.
Cómo se ve esto en la práctica
Establece dos puntos preestablecidos separados 180°. Ordena a la cámara que cambie entre ellos a máxima velocidad. Observa lo que sucede cuando se detiene:
- Cámara barata: La imagen pasa oscilando por el preset, rebota 2-3 veces en 300-500ms, y luego se estabiliza.
- Nuestra cámara: La imagen desacelera suavemente y se fija en el preset en menos de 50ms. Sin rebote. Sin oscilación.
Precisión de Posicionamiento a lo Largo del Tiempo
Una preocupación que tienen los integradores es si la precisión preestablecida7 se degrada con el paso de los meses o los años. Como nuestro sistema utiliza retroalimentación en bucle cerrado3 (no solo conteo de pasos en bucle abierto), la precisión de posicionamiento se mantiene constante. Garantizamos una precisión de < 0.1° durante toda la vida útil del producto.
¿Es el ruido del motor lo suficientemente bajo como para evitar alertar a un intruso durante un seguimiento silencioso?
Una vez instalé una cámara PTZ en la entrada de un almacén. El motor era tan ruidoso que los empleados bromeaban diciendo que sonaba como una impresora. Para la vigilancia encubierta, eso es inaceptable.
Nuestros motores paso a paso operan por debajo de 40dB, más silenciosos que una biblioteca. El micro-paso 1/256 elimina el zumbido agudo común en los drivers de paso completo, y nuestro diseño de amortiguación mecánica absorbe la vibración residual. Un intruso parado directamente debajo de la cámara no la oirá moverse.
 Prueba de nivel de ruido del motor de cámara PTZ silenciosa
Prueba de nivel de ruido del motor de cámara PTZ silenciosa
De dónde proviene el ruido del motor
Ruido del motor paso a paso8 tiene dos fuentes: resonancia electromagnética y vibración mecánica. Cada paso crea un pequeño impacto. En el modo de paso completo (1.8° por paso), estos impactos son lo suficientemente grandes como para hacer vibrar la carcasa y producir ruido audible.
Cómo el Micro-Paso Elimina el Ruido
En micro-paso 1/256, cada paso es de solo 0.007°. La forma de onda de corriente se vuelve casi sinusoidal en lugar de cuadrada. Esto elimina las frecuencias de resonancia que causan el zumbido. El motor se comporta casi como un motor DC sin escobillas: suave y silencioso.
Comparación de Niveles de Ruido
| Modo de Accionamiento | Ángulo de Paso | Nivel de Ruido Típico | ¿Audible a 3m? |
|---|---|---|---|
| Paso completo (1.8°) | 1.8° | 55-65 dB | Sí, claramente |
| Micropaso 1/16 | 0.1125° | 45-50 dB | Sí, débilmente |
| Micropaso 1/256 (nuestro) | 0.007° | < 40 dB | No |
Medidas Adicionales de Reducción de Ruido
Más allá del micropaso, también usamos:
- Soportes de amortiguación de goma entre el motor y la carcasa para absorber vibraciones.
- Modos optimizados de decaimiento de corriente (decaimiento mixto) para reducir la resonancia de rango medio.
- Modo de seguimiento silencioso con velocidad limitada en el firmware — cuando el seguimiento por IA está activo por la noche, la velocidad máxima de paneo se reduce automáticamente para mantener el ruido al mínimo absoluto.
Para el escenario de David: si está desplegando en una valla perimetral y la cámara necesita seguir silenciosamente a un intruso, esto importa. La cámara sigue a la persona sin revelar su posición. Su cliente obtiene imágenes limpias de la cara del intruso, y el intruso nunca sabe que está siendo grabado.
¿Puedo ver un gráfico de “Estabilidad de seguimiento” que mida la fluctuación en la señal de video?
Recibo esta pregunta a menudo de integradores que necesitan presentar datos concretos a sus clientes finales. “Muéstrame los números” es una demanda justa. Las afirmaciones de marketing no significan nada sin medición.
Sí. Medimos la estabilidad del seguimiento mediante el análisis del desplazamiento de píxeles en la salida de video. Durante una prueba de seguimiento estándar con zoom 40X en un objetivo a 500 m, nuestras cámaras muestran menos de ±2 píxeles de fluctuación en el cuadro central, muy por debajo del umbral de percepción humana.
![]() Gráfico de medición de fluctuación de la estabilidad del seguimiento de la cámara PTZ
Gráfico de medición de fluctuación de la estabilidad del seguimiento de la cámara PTZ
Cómo Medimos la Estabilidad del Seguimiento
Utilizamos un punto de referencia fijo en la escena (un marcador de alto contraste a una distancia conocida). La cámara sigue a un objetivo en movimiento mientras medimos cuánto se desplaza el punto de referencia de un cuadro a otro. Esto nos da una medida directa de la fluctuación mecánica introducida por el motor.
Condiciones de Prueba
- Nivel de zoom: 40X óptico
- Distancia del objetivo: 500 metros
- Velocidad del objetivo: Paso de caminata (5 km/h)
- Condiciones de viento: Viento cruzado de 10-15 km/h
- Herramienta de medición: Software de análisis de píxeles cuadro a cuadro
Lo que Muestran los Datos
Con un zoom de 40X, un píxel representa aproximadamente 0.005° de movimiento angular. Nuestra fluctuación medida se mantiene dentro de ±2 píxeles durante el seguimiento activo. Esto significa que la inestabilidad angular es inferior a ±0.01°.
A modo de comparación, el ojo humano no puede detectar el temblor de la imagen por debajo de aproximadamente ±5 píxeles en un monitor 1080p visto a una distancia normal. Nuestras cámaras se mantienen muy por debajo de ese umbral.
Métricas Clave de Estabilidad
| Métrica | Valor | Qué Significa |
|---|---|---|
| Fluctuación cuadro a cuadro | < ±2 píxeles a 40X | La imagen parece perfectamente estable para el espectador |
| Tiempo de estabilización tras cambio de velocidad | < 50ms | Sin bamboleo visible al cambiar la dirección del objetivo |
| Deriva a largo plazo (seguimiento continuo de 1 hora) | < 0.05° | El objetivo permanece centrado sin recalibración |
| Rendimiento con viento de 30 km/h | < ±4 píxeles a 40X | Todavía por debajo del umbral de percepción humana |
Por qué esto importa para los despliegues 4G
David, aquí tienes algo que la mayoría de la gente pasa por alto. En una conexión 4G4, el ancho de banda de video es limitado. Cuando la imagen tiembla, el codificador H.265 trata cada fotograma como “nuevo” porque los píxeles se han desplazado. Esto desperdicia ancho de banda en la codificación del movimiento del motor en lugar de los cambios reales de la escena.
Nuestra plataforma estable significa que el codificador puede usar fotogramas P (fotogramas predictivos) eficientes la mayor parte del tiempo. Solo el objetivo en movimiento genera nuevos datos. El fondo permanece estático en el flujo de bits. Esto se traduce directamente en:
- Menor consumo de datos en tu plan 4G
- Mayor calidad de imagen efectiva con el mismo bitrate
- Menos fotogramas perdidos durante el seguimiento con señal débil
También construimos un enlace de bitrate dinámico6 en el firmware. Cuando el motor inicia un paneo rápido, el codificador reduce temporalmente la resolución para evitar la desconexión de la transmisión. Una vez que el motor se detiene, la resolución completa regresa dentro de un fotograma. Su cliente nunca verá una transmisión congelada o rota durante el movimiento de la cámara.
Cómo ejecutar esta prueba usted mismo
Si desea verificarlo con sus propios ojos:
- Configure la cámara con un zoom de 40X en un objeto estático distante.
- Inicie el seguimiento por IA en una persona que camina por el campo de visión.
- Observe el fondo. Debería permanecer perfectamente quieto mientras solo la persona rastreada se mueve en el encuadre.
- Grabe 60 segundos de metraje y reprodúzcalo fotograma a fotograma. Cuente el desplazamiento de píxeles de cualquier punto de referencia fijo.
Estaremos encantados de proporcionar metraje de muestra y datos de medición sin procesar para las propuestas de su proyecto.
Conclusión
Nuestras cámaras PTZ utilizan micropasos 1/256, perfiles de curva S y frenado activo FOC para ofrecer un seguimiento sin vibraciones con cero sobreimpulso, lo suficientemente silenciosas para uso encubierto y lo suficientemente estables para un zoom 40X a 500 metros.
1. Explicación detallada de los perfiles de aceleración de curva S que limitan el tirón para un movimiento más suave. ︎↩︎ 2. Describe el perfil de movimiento trapezoidal estándar que causa tirón al arrancar/detenerse. ︎↩︎ 3. Introducción a los sistemas de control de bucle cerrado para una precisión constante. ︎↩︎ 4. Fundamentos de las redes 4G LTE y sus limitaciones de ancho de banda. ︎↩︎ 5. Explica la magnificación del zoom óptico y su efecto en los requisitos de estabilidad. ︎↩︎ 6. Explica las técnicas de tasa de bits adaptativa utilizadas para mantener la estabilidad de la transmisión. ︎↩︎ 7. Guía sobre las especificaciones de precisión de los preajustes PTZ y la fiabilidad. ︎↩︎ 8. Resumen técnico de las fuentes y la reducción del ruido del motor paso a paso. ︎↩︎