
Perdi horas revisando alertas falsos de pássaros e carros distantes em um projeto de fazenda remota. A solução foi simples: filtragem por tamanho do alvo. Mudou tudo.
Sim, câmeras PTZ profissionais suportam a configuração de limites de detecção com base no tamanho do alvo. Você pode configurar o sistema para ignorar qualquer objeto menor que uma porcentagem específica do quadro (como 2%), usando a proporção de pixels ou valores absolutos de pixels. Isso evita alertas falsos de pássaros, veículos distantes e outros ruídos de quadro pequeno.
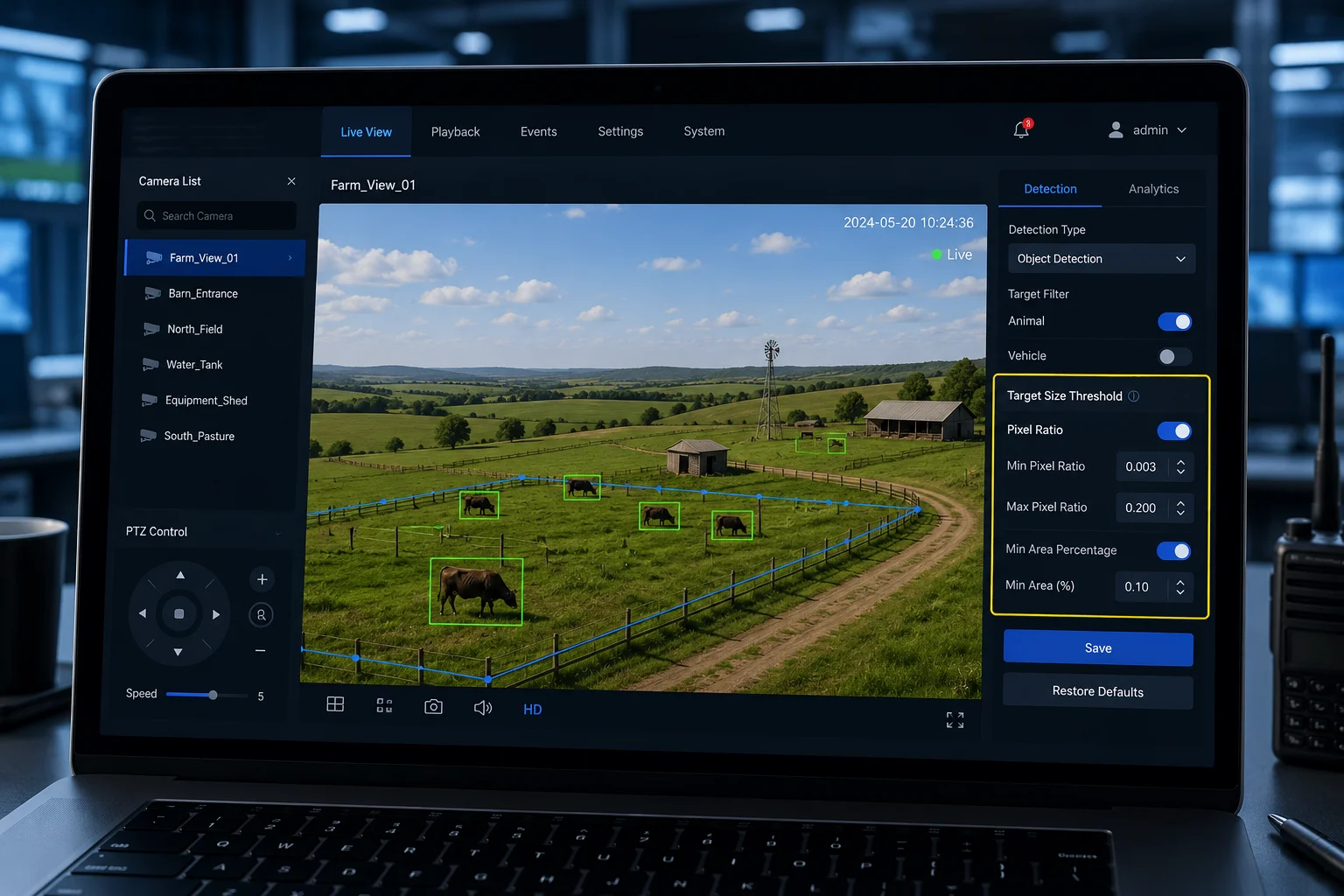 Configurações de limite de tamanho de alvo de câmera PTZ
Configurações de limite de tamanho de alvo de câmera PTZ
Abaixo, detalho exatamente como usar este recurso. Abordo a prevenção de alertas de pássaros, calibração para distância, rastreamento dinâmico à medida que os alvos crescem e ferramentas de seleção de caixa visual. Cada seção fornece os detalhes técnicos necessários para configurar isso corretamente em sua próxima implantação.
Índice
Posso Prevenir “Alertas de Pássaros” Ignorando Qualquer Objeto Que Ocupe Menos de 2% dos Pixels?
Certa vez, um cliente me ligou às 2 da manhã porque seu telefone vibrou 47 vezes durante a noite. Cada alerta era um pássaro passando pela lente. Esse projeto me ensinou o valor da filtragem por tamanho mínimo.
Sim, você pode eliminar alertas de pássaros definindo um limite de tamanho mínimo de objeto abaixo de 2% do quadro. O motor de IA calcula a caixa delimitadora de cada objeto detectado e a compara com a área total do quadro. Se o objeto for menor que seu limite, o sistema o descarta silenciosamente.
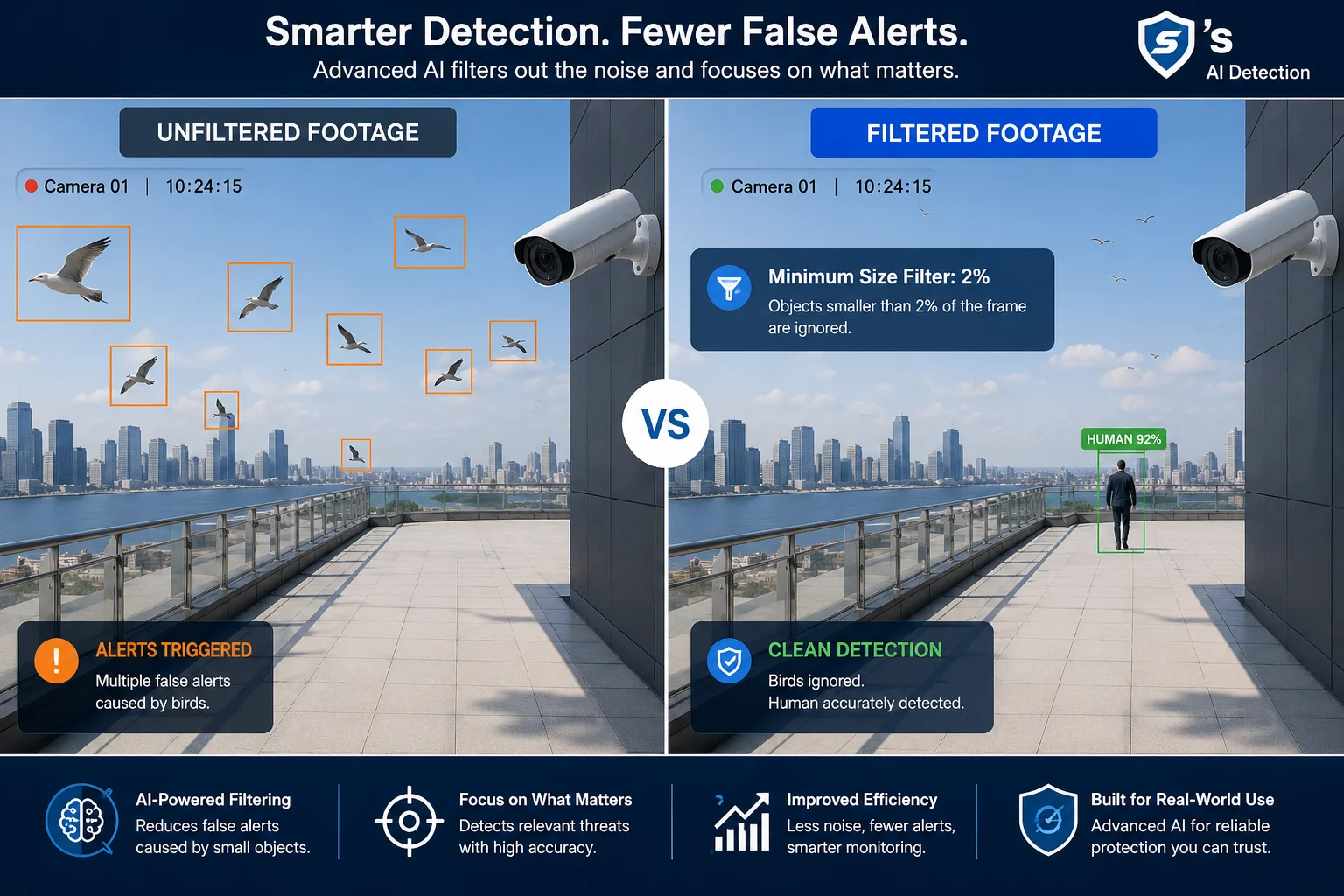 Prevenção de alertas de pássaros com filtro de tamanho mínimo
Prevenção de alertas de pássaros com filtro de tamanho mínimo
Como Funciona o Filtro de Tamanho Mínimo
O algoritmo de detecção desenha um retângulo em torno de cada objeto em movimento em cada quadro. Este retângulo é chamado de caixa delimitadora. O sistema então calcula qual porcentagem da imagem total esta caixa ocupa. Se a caixa for menor que o limite definido, o sistema a trata como ruído.
Por exemplo, um pássaro voando a 10 metros da câmera pode produzir uma caixa delimitadora que cobre apenas 0,3% de um quadro de 4MP. Uma pessoa andando a 30 metros pode cobrir 3-5% do mesmo quadro. Ao definir seu limite entre 1,5% e 2%, você cria uma lacuna clara entre “ruído” e “alvo real”.”
Por Que 2% É um Bom Ponto de Partida
O valor de 2% funciona bem para a maioria das aplicações de segurança de perímetro. Eis o porquê. Um padrão imagem de 4MP1 tem aproximadamente 8,3 milhões de pixels. Dois por cento disso são cerca de 166.000 pixels. Um corpo humano a 20-30 metros da câmera geralmente preenche mais do que essa área. Pássaros, insetos e tráfego distante quase nunca atingem esse tamanho.
Mas 2% não é um número universal. Seu limite real depende de três coisas:
- Resolução da câmera
- Distância focal da lente
- Distância até a fronteira do perímetro
Opções de Configuração para Filtragem de Tamanho Mínimo
| Parâmetro | Faixa | Valor recomendado | Caso de uso |
|---|---|---|---|
| Área mínima (%) | 0,11% – 501% | 11% – 21% | Filtrar pássaros, carros distantes |
| Área máxima (%) | 101% – 1001% | 701% – 801% | Filtrar obstruções da lente |
| Sensibilidade de detecção | Nível 1 – 10 | Nível 7 | Equilíbrio com filtro de tamanho |
| Modo de filtro | Área / Diagonal | Área | Uso geral do perímetro |
O que Acontece com Objetos Filtrados
Quando um objeto cai abaixo do seu limite, o sistema não o exclui simplesmente. Você tem opções. Em nosso firmware, você pode configurar o sistema para ainda gravar objetos filtrados no cartão SD sem enviar uma notificação push. Isso significa que você mantém evidências em vídeo de tudo, mas seu telefone só vibra para ameaças reais. Para implantações solares 4G2, isso economiza dados e bateria.
Filtragem Baseada em Diagonal como Alternativa
Alguns objetos mudam de forma à medida que se movem. Uma pessoa agachada parece muito diferente de uma pessoa em pé. A filtragem baseada em área pode flutuar nesses casos. Nosso firmware avançado oferece filtragem de comprimento diagonal3 como alternativa. A diagonal da caixa delimitadora permanece mais estável, independentemente das mudanças de postura. Isso lhe dá uma detecção mais consistente de alvos humanos, mesmo quando eles se dobram, agacham ou viram de lado.
Como Calibro o “Tamanho Mínimo do Objeto” para Corresponder à Distância do Meu Perímetro?
Aprendi isso da maneira mais difícil em um projeto de rancho no Texas. O cliente definiu seu limite muito alto e perdeu um invasor a 45 metros. A calibração adequada teria detectado.
Para calibrar o tamanho mínimo do objeto, peça a uma pessoa para caminhar até o seu limite de alerta mais distante enquanto você observa a porcentagem da caixa delimitadora em tempo real na interface web. Defina seu limite 20-30% abaixo desse valor observado para garantir que não haja detecções perdidas no alcance máximo.
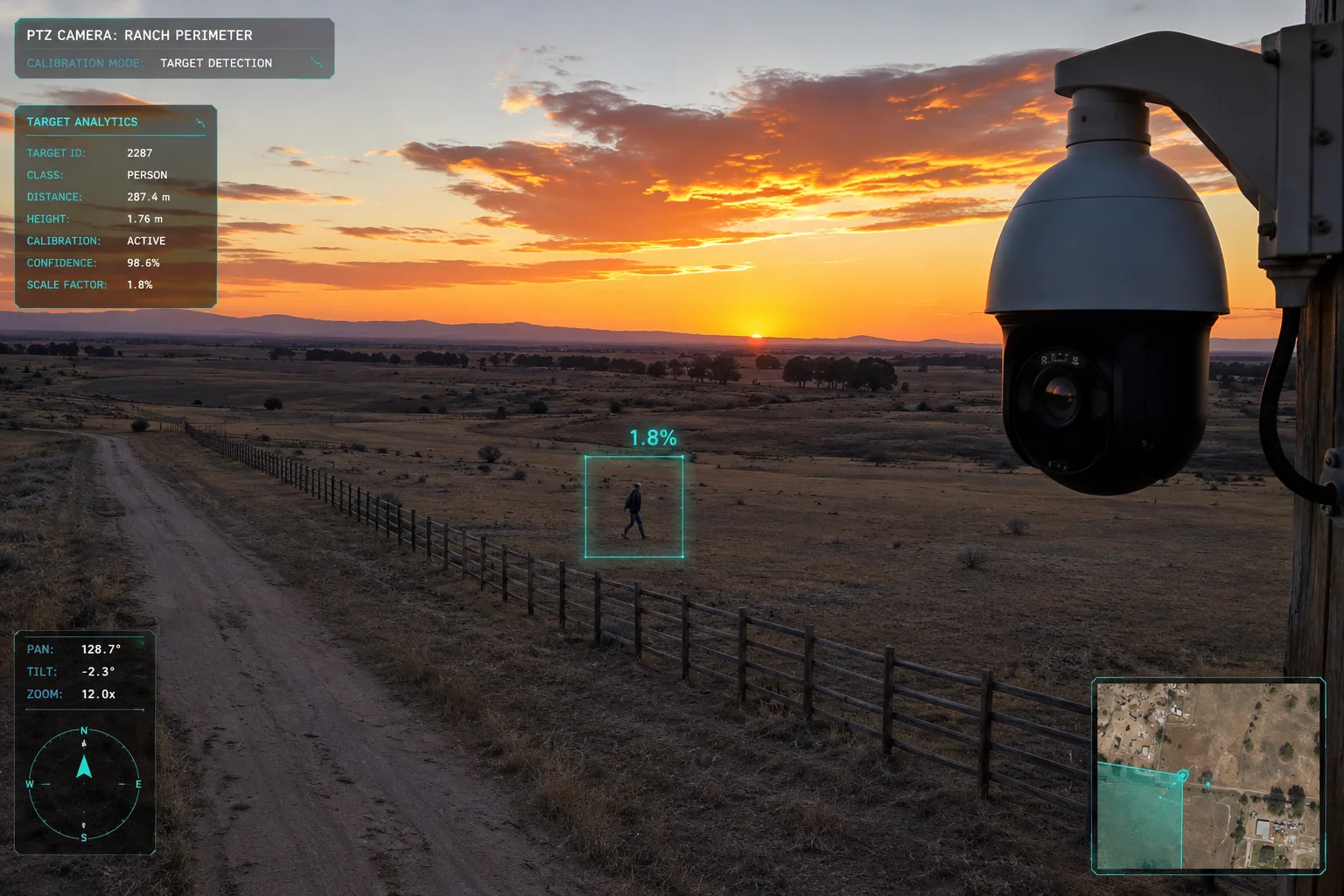 Calibrando o tamanho mínimo do objeto para a distância do perímetro
Calibrando o tamanho mínimo do objeto para a distância do perímetro
O Processo de Calibração de Campo
A calibração não é algo que você faz da sua mesa. Você precisa estar no local com a câmera instalada em sua posição final. Aqui está o processo passo a passo que recomendo a todos os integradores:
- Monte a câmera em sua localização permanente
- Abra a interface web ou SDK4 em seu laptop
- Ative a sobreposição de caixa delimitadora em tempo real
- Peça a uma pessoa para caminhar ao longo da sua linha de perímetro mais distante
- Observe a percentagem da caixa delimitadora exibida
- Defina o seu limiar 20-30% abaixo desse número
Por exemplo, se uma pessoa a 50 metros apresentar uma caixa delimitadora de 1,8%, defina o seu limiar para 1,2% ou 1,3%. Este buffer considera indivíduos menores, oclusão parcial por vegetação e condições de iluminação variáveis.
A Resolução Importa para a Calibração
O cálculo da percentagem está diretamente ligado à resolução da sua imagem. Se calibrar a 4MP e mais tarde mudar para 1080P, o seu limiar torna-se inválido. A densidade de píxeis muda, o que significa que a mesma pessoa à mesma distância produz um valor percentual diferente.
| Resolução | Total de pixels | Limiar de % (píxeis) | Pessoa a 30m (típico) |
|---|---|---|---|
| 4MP (2560×1440) | 3,686,400 | 73,728 | 3,2% – 4,5% |
| 1080P (1920×1080) | 2,073,600 | 41,472 | 2,8% – 3,9% |
| 5MP (2592×1944) | 5,038,848 | 100,777 | 2,5% – 3,8% |
O Comprimento Focal e o Zoom Afetam
A Zoom ótico de 38x5 A lente muda tudo no cálculo do tamanho. Em grande angular, uma pessoa a 50 metros é minúscula. Aumente o zoom para 20x, e essa mesma pessoa preenche uma grande parte do quadro. Se a sua câmara utilizar zoom automático durante o rastreamento, o limiar deve ter em conta o nível de zoom inicial — o nível em que ocorre a deteção inicial.
Digo sempre aos clientes: calibre no seu nível de zoom de patrulha padrão. Essa é a posição de zoom em que a câmara fica ociosa e a digitalizar. A deteção ocorre primeiro neste nível. Assim que a IA bloquear um alvo, o zoom aumenta para identificação, mas o gatilho inicial depende da posição de patrulha.
Fatores Ambientais Que Afetam a Calibração
O vento faz com que a vegetação se mova. A chuva cria riscos no quadro. Distorção térmica6 distorce objetos distantes. Tudo isso pode afetar os cálculos da caixa delimitadora. Recomendo calibrar nas piores condições esperadas, não nas melhores. Se o seu local tem grama alta que balança ao vento, calibre em um dia de vento. Isso garante que seu limite permaneça válido durante todo o ano.
O Sistema Ainda Rastreará um Alvo Distante à Medida que Ele Cresce Enquanto se Aproxima da Câmera?
Tive um cliente que me fez exatamente essa pergunta no ano passado. Ele se preocupava que filtrar objetos pequenos significasse que o sistema nunca “capturaria” uma ameaça que começa de longe. A resposta o surpreendeu.
Sim, o sistema reavalia continuamente cada objeto em movimento quadro a quadro. Assim que um alvo filtrado cresce além do seu limite mínimo ao se aproximar da câmera, a IA imediatamente o trava e inicia o rastreamento ativo. Nenhuma intervenção manual é necessária.
![]() Rastreamento dinâmico de alvos à medida que o objeto se aproxima da câmera
Rastreamento dinâmico de alvos à medida que o objeto se aproxima da câmera
Reavaliação Quadro a Quadro
O processador de IA não toma uma decisão única sobre cada objeto. Ele executa a detecção em cada quadro individual — tipicamente de 15 a 30 vezes por segundo. Cada quadro é uma avaliação nova. Portanto, quando uma pessoa aparece a 100 metros e registra apenas 0,5% do quadro, o sistema nota o movimento, mas não alerta. À medida que essa pessoa se aproxima, a caixa delimitadora aumenta. No momento em que cruza seu limite de 2%, o sistema dispara.
Este processo é contínuo. Não há atraso entre cruzar o limite e disparar o alerta. A transição de “ruído filtrado” para “alvo ativo” ocorre dentro de um ciclo de quadro — aproximadamente 33 a 66 milissegundos.
A Sequência de Transição de Rastreamento
Veja o que acontece tecnicamente quando um alvo cruza o limite:
- Fase pré-limite: Objeto detectado, caixa delimitadora calculada, tamanho abaixo do limite. O sistema registra o movimento, mas não alerta. Cartão SD grava silenciosamente, se configurado.
- Cruzamento do limite: Caixa delimitadora excede o tamanho mínimo. Classificador de IA é executado (humano/veículo/animal). Se a classificação corresponder às suas categorias de alerta, o sistema dispara.
- Fase de rastreamento ativo: Motor PTZ é acionado. Câmera segue o alvo. Zoom aumenta para identificação. Notificação push 4G enviada para o aplicativo.
Por que este Design Economiza Bateria e Dados
Para sistemas 4G alimentados por energia solar, essa abordagem é crucial. Cada notificação push consome dados. Cada movimento do motor PTZ7 consome energia. Ao filtrar objetos pequenos, você evita centenas de ativações desnecessárias do motor por dia. A câmera permanece parada, consumindo energia mínima, até que um alvo real cruze o limite. Então, ela ativa totalmente.
Já vi isso reduzir o consumo diário de energia em 40-60% em instalações solares remotas. Isso significa painéis solares menores, baterias menores e menor custo total do projeto para seus clientes.
Combinando Filtragem de Tamanho com Detecção de Zona
Para máxima precisão, combine a filtragem de tamanho com zonas de detecção. Desenhe uma zona ao redor da sua cerca de perímetro. Defina o tamanho mínimo para 1,5%. Agora o sistema só alerta quando um objeto maior que 1,5% aparece dentro da sua zona desenhada. Esta filtragem de dupla camada elimina virtualmente alertas falsos, ao mesmo tempo que capta cada intrusão legítima.
O Aplicativo Permite uma “Seleção de Caixa” Visual para Definir o Limite de Tamanho do Alvo?
Lembro-me da primeira vez que mostrei a um cliente a ferramenta de seleção de caixas. Ele estava digitando valores de pixels manualmente por semanas. Quando ele viu que podia simplesmente desenhar duas caixas na tela, ele disse que era o recurso que ele nunca soube que precisava.
Sim, a interface web e o aplicativo móvel suportam seleção visual de caixas. Você desenha um pequeno retângulo representando seu tamanho de alvo mínimo e um grande retângulo representando seu tamanho de alvo máximo diretamente no feed de vídeo ao vivo. O sistema converte automaticamente essas seleções visuais em valores de limite de pixels.
 Interface de seleção visual de caixas para tamanho de alvo
Interface de seleção visual de caixas para tamanho de alvo
Como Funciona a Seleção Visual de Caixas
Em vez de calcular porcentagens manualmente, você simplesmente desenha na tela. A interface mostra o feed da sua câmera ao vivo. Você usa seu mouse ou dedo para desenhar uma caixa pequena — isso representa o menor objeto que você deseja detectar. Em seguida, você desenha uma caixa maior — isso representa o maior alvo válido. Qualquer coisa fora desses dois limites é filtrada.
O firmware lê as dimensões em pixels das suas caixas desenhadas e as converte automaticamente em valores de limite. Isso é muito mais intuitivo do que inserir números. Você pode ver exatamente qual tamanho de objeto acionará um alerta porque você o está desenhando diretamente na cena real.
Processo Passo a Passo de Seleção de Caixas
É assim que eu guio os clientes através disso:
- Faça login na interface web da câmera
- Navegue até Configurações de Detecção de IA
- Selecione “Filtro de Tamanho” ou “Tamanho do Objeto”
- Clique em “Desenhar Tamanho Mínimo”
- Desenhe uma caixa no vídeo que corresponda ao menor alvo que você deseja capturar (por exemplo, desenhe uma caixa do tamanho de uma pessoa no seu ponto de perímetro mais distante)
- Clique em “Desenhar Tamanho Máximo”
- Desenhe uma caixa representando o maior alvo válido
- Salve e teste
Vantagens em Relação à Entrada Manual de Números
| Método | Precisão | Facilidade de Uso | Tempo de Calibração | Risco de Erro |
|---|---|---|---|---|
| Entrada manual de percentagem | Alta | Baixa | 30-60 min | Alto (erros de digitação, cálculo incorreto) |
| Seleção visual de caixa | Alta | Alta | 5-10 min | Baixo (o que você vê é o que você obtém) |
| Entrada de pixel diagonal | Médio | Baixa | 20-40 min | Médio |
Configuração Remota via 4G
Para câmeras conectadas via 4G em locais remotos, você pode realizar a seleção de caixas remotamente através da plataforma de nuvem8. Você não precisa estar no local após a instalação inicial. Se as condições mudarem — digamos que uma nova cerca seja construída mais perto da câmera — você pode redesenhar suas caixas de tamanho do seu escritório. A câmera aplica as novas configurações imediatamente.
Esta é uma grande vantagem para integradores que gerenciam dezenas ou centenas de locais remotos. Você ajusta os limites sem enviar um técnico. Sem deslocamento de veículo. Sem custo de viagem. Basta fazer login, redesenhar e salvar.
Combinando Seleção de Caixa com Classificação de IA
O filtro de tamanho funciona em conjunto com classificação de IA9. Mesmo que um objeto passe pelo limite de tamanho, ele ainda deve passar pelo classificador de IA. Portanto, se uma grande bola de mato passar pela sua zona e exceder 2% do quadro, o classificador de IA o identificará como “não humano” e “não veículo”. Nenhum alerta será disparado. Essa abordagem de dupla camada — filtragem de tamanho mais classificação de IA — oferece a menor taxa de falsos alarmes possível, mantendo alta sensibilidade de detecção para ameaças reais.
Conclusão
A filtragem de tamanho de alvo é uma das ferramentas mais eficazes para reduzir falsos alertas na vigilância PTZ remota. Defina seu limite mínimo através da seleção visual de caixa, calibre no local e deixe a IA cuidar do resto. Se precisar de ajuda para configurar isso para o seu projeto específico, entre em contato comigo em sales05@.com.
1. Explicação da resolução de 4MP e seu impacto na qualidade da imagem e densidade de pixels. ︎↩︎ 2. Visão geral dos sistemas de vigilância 4G alimentados por energia solar e seus desafios de gerenciamento de energia. ︎↩︎ 3. Descrição técnica da filtragem de tamanho de objeto baseada em diagonal usada em câmeras de segurança avançadas. ︎↩︎ 4. O que é um kit de desenvolvimento de software e como ele permite a integração personalizada. ︎↩︎ 5. Detalhes sobre as taxas de zoom óptico e seu efeito nas capacidades de vigilância. ︎↩︎ 6. Explicação de como a turbulência atmosférica e o brilho de calor distorcem imagens de longo alcance. ︎↩︎ 7. Como os motores PTZ operam e suas implicações de consumo de energia. ︎↩︎ 8. Visão geral do gerenciamento de câmeras baseado em nuvem e das capacidades de configuração remota. ︎↩︎ 9. Explicação da classificação de imagem baseada em IA usada em vigilância moderna. ︎↩︎