
لقد أضعت ساعات في مراجعة التنبيهات الخاطئة من الطيور والسيارات البعيدة في مشروع مزرعة نائية. كان الحل بسيطًا: تصفية حجم الهدف. لقد غير ذلك كل شيء.
نعم، تدعم كاميرات PTZ الاحترافية ضبط عتبات الكشف بناءً على حجم الهدف. يمكنك تكوين النظام لتجاهل أي كائن أصغر من نسبة مئوية معينة من الإطار (مثل 2%)، باستخدام نسبة البكسل أو قيم البكسل المطلقة. هذا يمنع التنبيهات الخاطئة من الطيور والمركبات البعيدة والضوضاء الأخرى ذات الإطار الصغير.
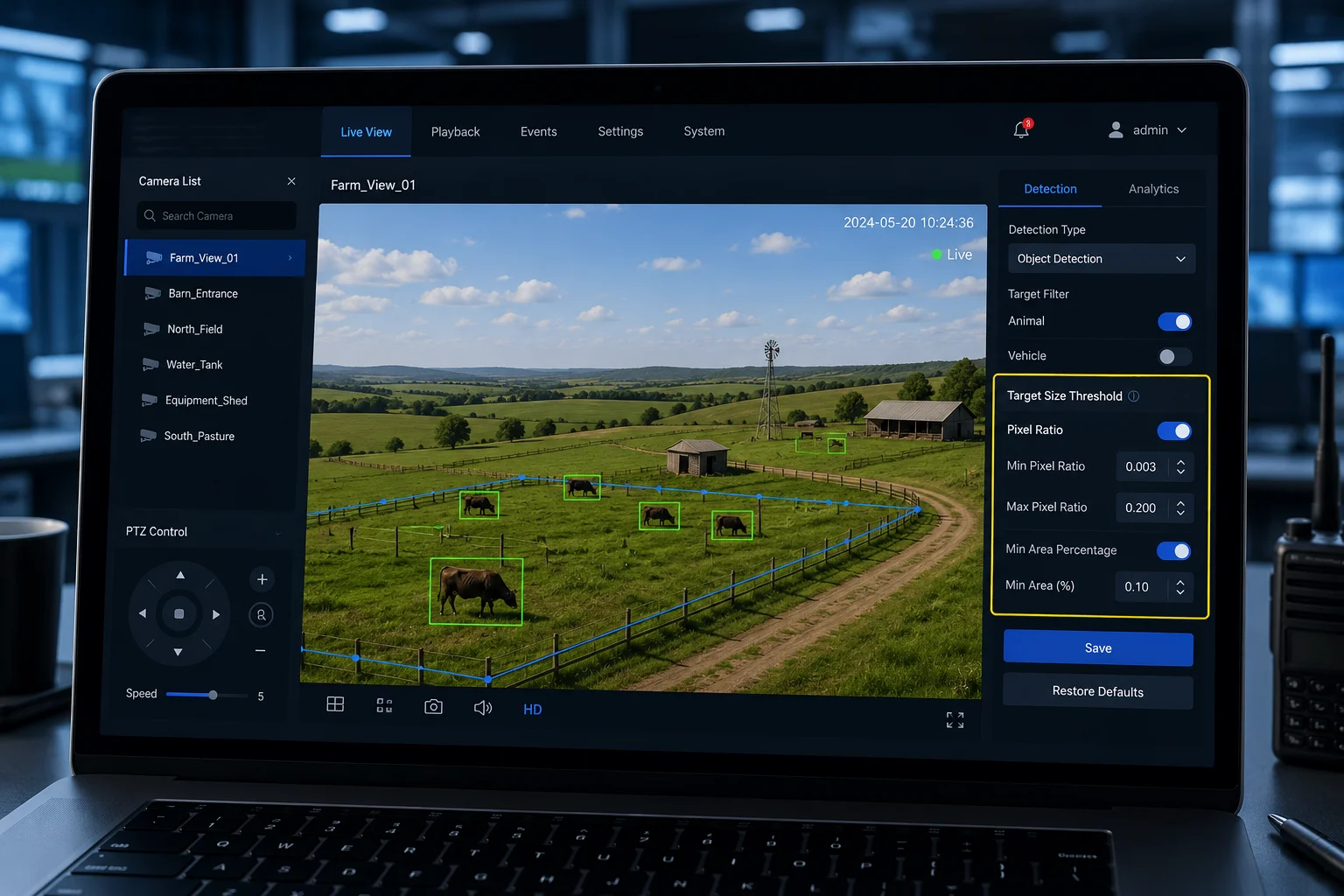 إعدادات عتبة حجم هدف كاميرا PTZ
إعدادات عتبة حجم هدف كاميرا PTZ
أدناه، سأوضح بالتفصيل كيفية استخدام هذه الميزة. سأغطي منع تنبيهات الطيور، والمعايرة للمسافة، والتتبع الديناميكي مع نمو الأهداف، وأدوات تحديد الصندوق المرئي. يقدم لك كل قسم التفاصيل التقنية التي تحتاجها لتكوين هذا بشكل صحيح في عملية النشر التالية.
جدول المحتويات
هل يمكنني منع “تنبيهات الطيور” عن طريق تجاهل أي كائن يشغل أقل من 2% من وحدات البكسل؟
اتصل بي أحد العملاء ذات مرة في الساعة 2 صباحًا لأن هاتفه اهتز 47 مرة خلال الليل. كان كل تنبيه عبارة عن طائر يمر أمام العدسة. علمني هذا المشروع قيمة تصفية الحد الأدنى للحجم.
نعم، يمكنك التخلص من تنبيهات الطيور عن طريق تعيين حد أدنى لحجم الكائن أقل من 2% من الإطار. يقوم محرك الذكاء الاصطناعي بحساب الصندوق المحيط لكل كائن مكتشف ويقارنه بمساحة الإطار الإجمالية. إذا كان الكائن أصغر من الحد الذي حددته، يتجاهل النظام ذلك بصمت.
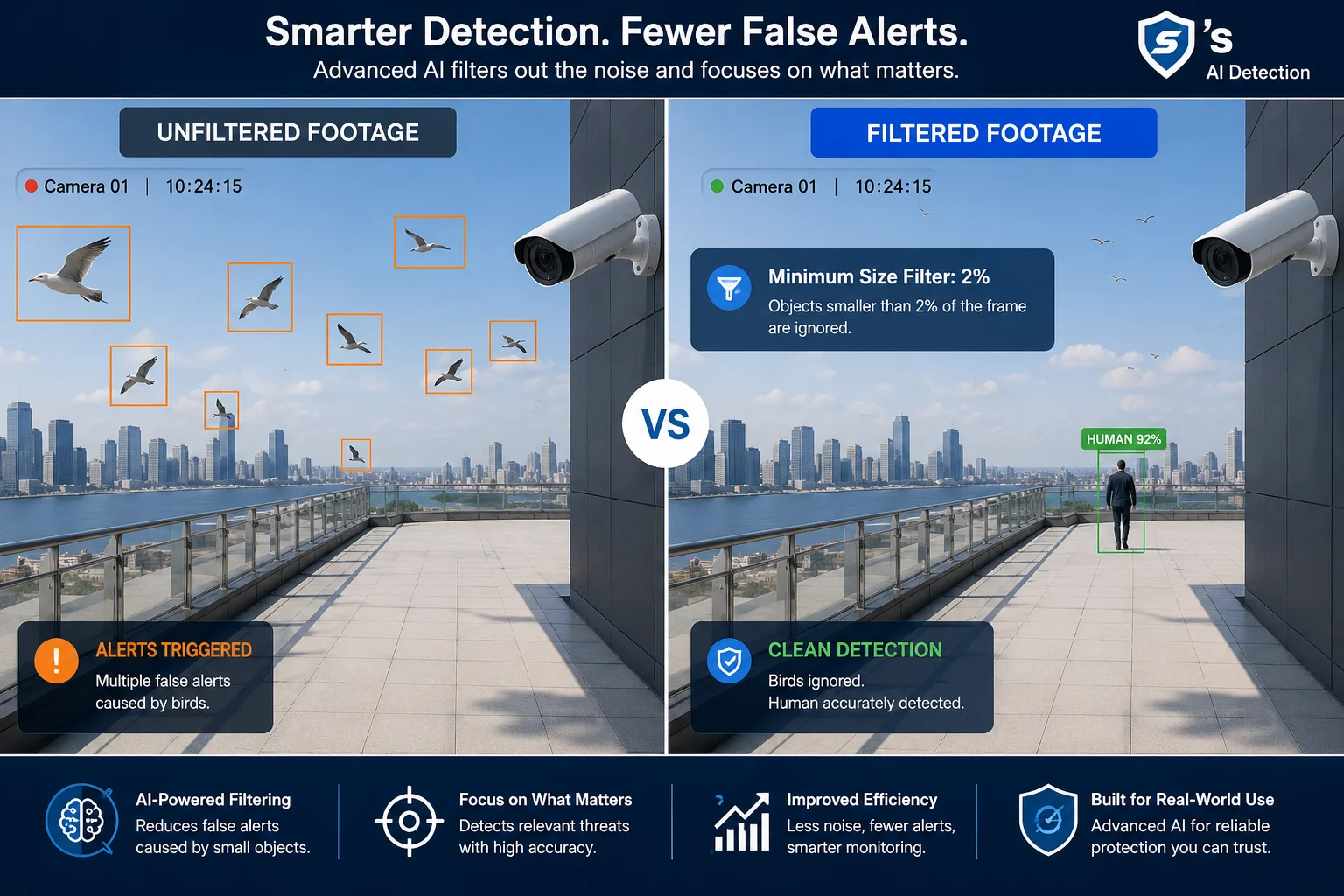 منع تنبيهات الطيور باستخدام مرشح الحد الأدنى للحجم
منع تنبيهات الطيور باستخدام مرشح الحد الأدنى للحجم
كيف يعمل مرشح الحد الأدنى للحجم
يرسم خوارزمية الكشف مستطيلاً حول كل كائن متحرك في كل إطار. يُطلق على هذا المستطيل اسم الصندوق المحيط. ثم يحسب النظام النسبة المئوية التي يشغلها هذا الصندوق من الصورة الإجمالية. إذا كان الصندوق أصغر من الحد الذي حددته، يعامله النظام على أنه ضوضاء.
على سبيل المثال، قد ينتج عن طائر يطير على بعد 10 أمتار من الكاميرا صندوق محيط يشغل 0.3% فقط من إطار بدقة 4 ميجابكسل. قد يشغل شخص يمشي على بعد 30 مترًا 3-5% من نفس الإطار. من خلال تعيين الحد الخاص بك عند 1.5% إلى 2%، فإنك تنشئ فجوة واضحة بين “الضوضاء” و “الهدف الحقيقي”.”
لماذا 2% نقطة انطلاق جيدة
تعمل قيمة 2% بشكل جيد لمعظم تطبيقات أمن المحيط. إليك السبب. صورة قياسية بدقة 4 ميجابكسل1 تحتوي على حوالي 8.3 مليون بكسل. اثنان بالمائة من ذلك حوالي 166,000 بكسل. يملأ جسم الإنسان على بعد 20-30 مترًا من الكاميرا عادةً أكثر من هذه المساحة. الطيور والحشرات وحركة المرور البعيدة نادرًا ما تصل إلى هذا الحجم.
لكن 2% ليس رقمًا عالميًا. يعتمد الحد الفعلي الخاص بك على ثلاثة أشياء:
- دقة الكاميرا
- البعد البؤري للعدسة
- المسافة إلى حدود المحيط
خيارات التكوين لتصفية الحد الأدنى للحجم
| المعلمة | النطاق | القيمة الموصى بها | حالة الاستخدام |
|---|---|---|---|
| الحد الأدنى للمساحة (%) | 0.11% – 501% | 11% – 21% | تصفية الطيور والسيارات البعيدة |
| الحد الأقصى للمساحة (%) | 101% – 1001% | 701% – 801% | تصفية انسدادات العدسة |
| حساسية الكشف | المستوى 1 – 10 | المستوى 7 | التوازن مع مرشح الحجم |
| وضع التصفية | المساحة / القطر | المساحة | الاستخدام العام للمحيط |
ماذا يحدث للكائنات المفلترة
عندما يسقط كائن ما تحت الحد الأدنى الخاص بك، لا يقوم النظام بحذفه ببساطة. لديك خيارات. في برنامجنا الثابت، يمكنك تكوين النظام لتسجيل الكائنات المفلترة على بطاقة SD دون إرسال إشعار دفع. هذا يعني أنك تحتفظ بأدلة فيديو لكل شيء، ولكن هاتفك يهتز فقط للتهديدات الحقيقية. بالنسبة لـ عمليات النشر بالطاقة الشمسية 4G2, ، هذا يوفر البيانات والبطارية.
التصفية المستندة إلى القطر كبديل
تتغير أشكال بعض الكائنات أثناء حركتها. يبدو الشخص الذي يجلس القرفصاء مختلفًا تمامًا عن الشخص الواقف. يمكن أن تتقلب التصفية المستندة إلى المنطقة في هذه الحالات. يقدم برنامجنا الثابت المتقدم تصفية القطر3 كبديل. يظل قطر مربع التحديد أكثر استقرارًا بغض النظر عن تغيرات الوضعية. يمنحك هذا اكتشافًا أكثر اتساقًا للأهداف البشرية حتى عندما ينحنون أو يجلسون القرفصاء أو يستديرون جانبًا.
كيف أقوم بمعايرة “الحد الأدنى لحجم الكائن” لمطابقة مسافة محيطي؟
تعلمت هذا بالطريقة الصعبة في مشروع مزرعة في تكساس. قام العميل بضبط الحد الأدنى الخاص به على مستوى عالٍ جدًا وفاتته متسلل على بعد 45 مترًا. كان من الممكن أن يكتشفه المعايرة الصحيحة.
لمعايرة الحد الأدنى لحجم الكائن، اجعل شخصًا يمشي عند أبعد حدود للتنبيه الخاصة بك أثناء مراقبتك لنسبة مربع التحديد المباشر على الواجهة الرسومية على الويب. اضبط الحد الأدنى الخاص بك على 20-30% أقل من القيمة المرصودة لضمان عدم تفويت أي اكتشافات على أقصى مدى.
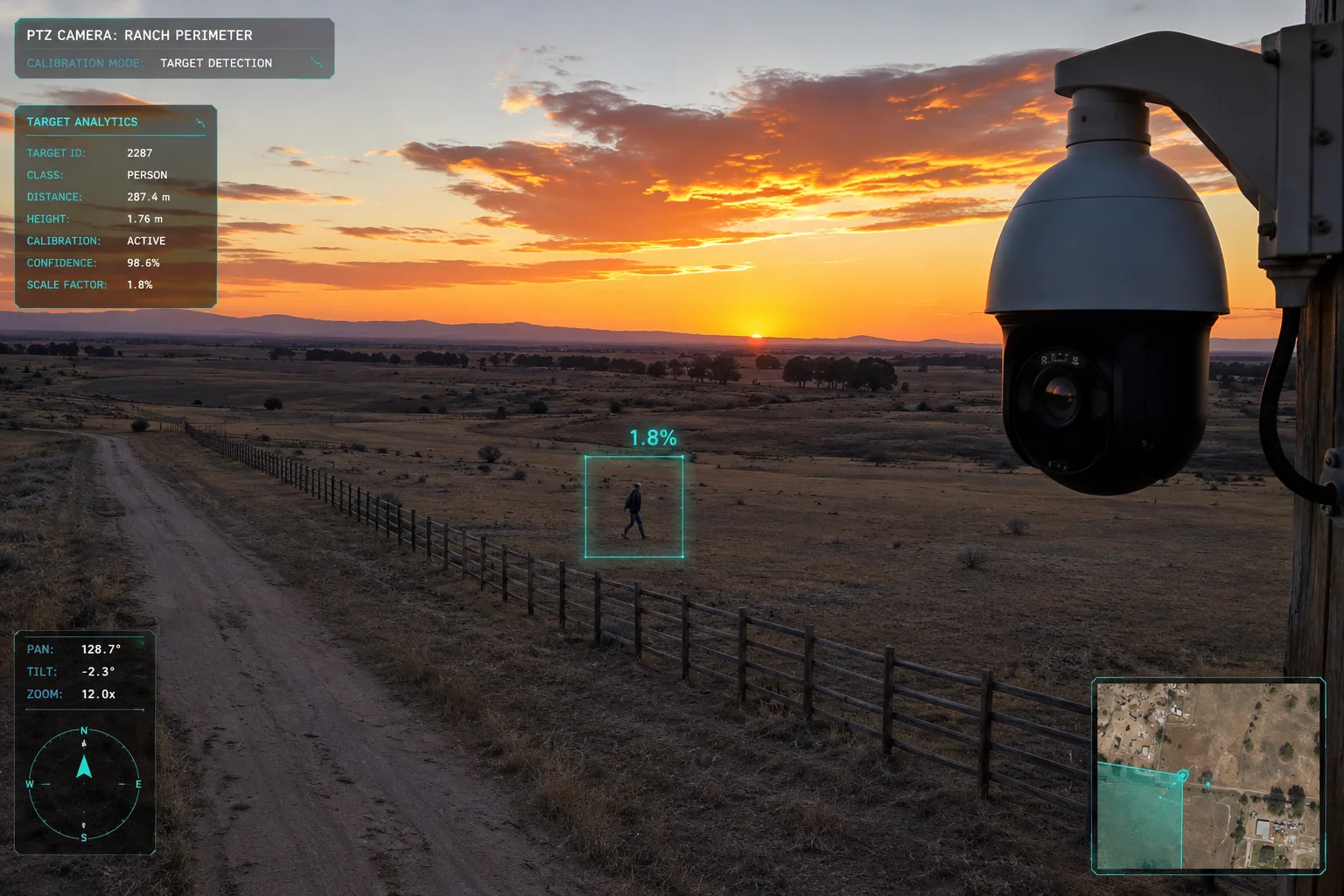 معايرة الحد الأدنى لحجم الكائن لمسافة المحيط
معايرة الحد الأدنى لحجم الكائن لمسافة المحيط
عملية المعايرة الميدانية
المعايرة ليست شيئًا تقوم به من مكتبك. تحتاج إلى أن تكون في الموقع مع تثبيت الكاميرا في موضعها النهائي. إليك العملية خطوة بخطوة التي أوصي بها لكل مُدمج:
- قم بتركيب الكاميرا في موقعها الدائم
- افتح الواجهة الرسومية على الويب أو حزمة أدوات تطوير البرمجيات4 على جهاز الكمبيوتر المحمول الخاص بك
- قم بتمكين تراكب مربع التحديد في الوقت الفعلي
- اجعل شخصًا يمشي على طول خط المحيط الأبعد الخاص بك
- لاحظ النسبة المئوية لمربع التحديد المعروضة
- اضبط الحد الخاص بك بنسبة 20-30% أقل من هذا الرقم
على سبيل المثال، إذا أظهر شخص على بعد 50 مترًا مربع تحديد بحجم 1.8%، فاضبط الحد الخاص بك على 1.2% أو 1.3%. هذا الهامش يأخذ في الاعتبار الأفراد الأصغر حجمًا، والانسداد الجزئي بواسطة النباتات، وظروف الإضاءة المتغيرة.
الدقة مهمة للمعايرة
يرتبط حساب النسبة المئوية مباشرة بدقة صورتك. إذا قمت بالمعايرة بدقة 4 ميجابكسل ثم انتقلت لاحقًا إلى 1080 بكسل، يصبح الحد الخاص بك غير صالح. تتغير كثافة البكسل، مما يعني أن نفس الشخص على نفس المسافة ينتج قيمة نسبة مئوية مختلفة.
| القرار | إجمالي وحدات البكسل | حد النسبة المئوية (بكسل) | شخص على بعد 30 مترًا (نموذجي) |
|---|---|---|---|
| 4 ميجابكسل (2560×1440) | 3,686,400 | 73,728 | 3.2% – 4.5% |
| 1080 بكسل (1920×1080) | 2,073,600 | 41,472 | 2.8% – 3.9% |
| 5 ميجابكسل (2592×1944) | 5,038,848 | 100,777 | 2.5% – 3.8% |
تأثير البعد البؤري والتقريب
A تقريب بصري 38X5 العدسة تغير كل شيء فيما يتعلق بحساب الحجم. عند زاوية واسعة، يكون الشخص على بعد 50 مترًا صغيرًا جدًا. قم بالتقريب إلى 20X، ويشغل نفس الشخص جزءًا كبيرًا من الإطار. إذا كانت الكاميرا تستخدم التقريب التلقائي أثناء التتبع، فيجب أن يأخذ الحد في الاعتبار مستوى التقريب الأولي - المستوى الذي يحدث فيه الاكتشاف الأولي.
أنا دائمًا أقول للعملاء: قم بالمعايرة عند مستوى التقريب الافتراضي للدورية. هذا هو موضع التقريب الذي تكون فيه الكاميرا في وضع الخمول والمسح. يحدث الاكتشاف عند هذا المستوى أولاً. بمجرد أن يثبت الذكاء الاصطناعي على هدف، يزداد التقريب لتحديد الهوية، ولكن يعتمد المشغل الأولي على موضع الدورية.
العوامل البيئية التي تؤثر على المعايرة
تتسبب الرياح في تحرك النباتات. يخلق المطر خطوطًا عبر الإطار. الارتجاج الحراري6 يشوه الأجسام البعيدة. كل هذه يمكن أن تؤثر على حسابات الصندوق المحيط. أوصي بالمعايرة خلال أسوأ الظروف المتوقعة، وليس أفضلها. إذا كان موقعك يحتوي على أعشاب طويلة تتأرجح في الرياح، فقم بالمعايرة في يوم عاصف. هذا يضمن بقاء عتبتك صالحة على مدار العام.
هل سيظل النظام يتتبع هدفًا بعيدًا مع نموه أثناء اقترابه من الكاميرا؟
سألني أحد العملاء هذا السؤال بالضبط العام الماضي. كان قلقًا من أن تصفية الأجسام الصغيرة تعني أن النظام لن “يلتقط” أبدًا تهديدًا يبدأ من بعيد. كانت الإجابة مفاجئة له.
نعم، يقوم النظام بإعادة تقييم مستمرة لكل جسم متحرك إطارًا بإطار. بمجرد أن يتجاوز الهدف المصفى الحد الأدنى للعتبة الخاصة بك أثناء اقترابه من الكاميرا، يقوم الذكاء الاصطناعي بتثبيته فورًا ويبدأ التتبع النشط. لا حاجة لتدخل يدوي.
![]() تتبع الهدف الديناميكي مع اقتراب الجسم من الكاميرا
تتبع الهدف الديناميكي مع اقتراب الجسم من الكاميرا
إعادة التقييم إطارًا بإطار
لا يتخذ معالج الذكاء الاصطناعي قرارًا لمرة واحدة بشأن كل كائن. يقوم بتشغيل الكشف على كل إطار فردي - عادةً من 15 إلى 30 مرة في الثانية. كل إطار هو تقييم جديد. لذلك عندما يظهر شخص على بعد 100 متر ويسجل كـ 0.5% فقط من الإطار، يسجل النظام الحركة ولكنه لا ينبه. مع اقتراب هذا الشخص، ينمو الصندوق المحيط. في اللحظة التي يتجاوز فيها عتبة 2% الخاصة بك، يقوم النظام بتشغيل التنبيه.
هذه العملية سلسة. لا يوجد تأخير بين تجاوز العتبة وتشغيل التنبيه. يحدث الانتقال من “ضوضاء مصفاة” إلى “هدف نشط” في دورة إطار واحدة - حوالي 33 إلى 66 مللي ثانية.
تسلسل تسليم التتبع
إليك ما يحدث تقنيًا عندما يعبر الهدف العتبة:
- مرحلة ما قبل العتبة: تم اكتشاف الجسم، تم حساب الصندوق المحيط، الحجم أقل من العتبة. يسجل النظام الحركة ولكنه لا ينبه. يتم تسجيل بطاقة SD بصمت إذا تم تكوينها.
- عبور العتبة: يتجاوز الصندوق المحيط الحد الأدنى للحجم. يتم تشغيل مصنف الذكاء الاصطناعي (إنسان/مركبة/حيوان). إذا تطابق التصنيف مع فئات التنبيه الخاصة بك، يقوم النظام بتشغيل التنبيه.
- مرحلة التتبع النشط: يتم تشغيل محرك PTZ. تتبع الكاميرا الهدف. يزيد التكبير للتعرف. يتم إرسال إشعار دفع عبر 4G إلى التطبيق.
لماذا هذا التصميم يوفر البطارية والبيانات
بالنسبة للأنظمة التي تعمل بالبطارية بالطاقة الشمسية عبر 4G، فإن هذا النهج بالغ الأهمية. كل إشعار دفع يكلف بيانات. كل محرك PTZ7 حركة تكلف طاقة. عن طريق تصفية الأجسام الصغيرة، تتجنب مئات التنشيطات غير الضرورية للمحرك يوميًا. تظل الكاميرا ثابتة، وتستهلك الحد الأدنى من الطاقة، حتى يعبر هدف حقيقي العتبة. ثم تنشط بالكامل.
لقد رأيت هذا يقلل من استهلاك الطاقة اليومي بنسبة 40-60% في التركيبات الشمسية عن بعد. هذا يعني ألواحًا شمسية أصغر، وبطاريات أصغر، وتكلفة مشروع إجمالية أقل لعملائك.
دمج تصفية الحجم مع اكتشاف المنطقة
للحصول على أقصى قدر من الدقة، ادمج تصفية الحجم مع مناطق الاكتشاف. ارسم منطقة حول سياج محيطك. اضبط الحد الأدنى للحجم على 1.5%. الآن ينبه النظام فقط عندما يظهر كائن أكبر من 1.5% داخل منطقتك المرسومة. هذا الترشيح المزدوج يلغي فعليًا التنبيهات الخاطئة مع التقاط كل اقتحام شرعي.
هل يسمح التطبيق بتحديد “صندوق مرئي” لتحديد عتبة حجم الهدف؟
أتذكر المرة الأولى التي عرضت فيها على عميل أداة تحديد المربعات. كان يكتب قيم البكسل يدويًا لأسابيع. عندما رأى أنه يمكنه ببساطة رسم مربعين على الشاشة، قال إنها الميزة التي لم يكن يعرف أنه يحتاجها.
نعم، تدعم كل من واجهة الويب وتطبيق الهاتف المحمول تحديد المربعات المرئي. ترسم مستطيلاً صغيرًا يمثل الحد الأدنى لحجم هدفك ومستطيلاً كبيرًا يمثل الحد الأقصى لحجم هدفك مباشرة على بث الفيديو المباشر. يقوم النظام تلقائيًا بتحويل هذه التحديدات المرئية إلى قيم عتبة البكسل.
 واجهة تحديد المربعات المرئية لحجم الهدف
واجهة تحديد المربعات المرئية لحجم الهدف
كيف تعمل تحديد المربعات المرئية
بدلاً من حساب النسب المئوية يدويًا، يمكنك ببساطة الرسم على الشاشة. تعرض الواجهة بث الكاميرا المباشر الخاص بك. تستخدم الماوس أو الإصبع لرسم مربع صغير - يمثل هذا أصغر كائن تريد اكتشافه. ثم ترسم مربعًا أكبر - يمثل هذا أكبر هدف صالح. يتم تصفية أي شيء خارج هذين الحدين.
يقرأ البرنامج الثابت أبعاد البكسل للمربعات التي رسمتها ويحولها إلى قيم عتبة تلقائيًا. هذا أكثر بديهية بكثير من إدخال الأرقام. يمكنك رؤية حجم الكائن بالضبط الذي سيؤدي إلى تنبيه لأنك ترسمه مباشرة فوق المشهد الفعلي.
عملية تحديد المربعات خطوة بخطوة
إليك كيف أشرح للعملاء هذا:
- تسجيل الدخول إلى واجهة الويب للكاميرا
- الانتقال إلى إعدادات اكتشاف الذكاء الاصطناعي
- تحديد “مرشح الحجم” أو “حجم الكائن”
- النقر على “رسم الحد الأدنى للحجم”
- ارسم مربعًا على الفيديو يطابق أصغر هدف تريد التقاطه (على سبيل المثال، ارسم مربعًا بحجم شخص عند أبعد نقطة محيطة بك)
- النقر على “رسم الحد الأقصى للحجم”
- ارسم مربعًا يمثل أكبر هدف صالح
- حفظ واختبار
مزايا على إدخال الأرقام اليدوي
| الطريقة | الدقة | سهولة الاستخدام | وقت المعايرة | مخاطر الخطأ |
|---|---|---|---|---|
| إدخال النسبة يدويًا | عالية | منخفضة | 30-60 دقيقة | مرتفع (أخطاء إملائية، سوء تقدير) |
| تحديد المربع المرئي | عالية | عالية | 5-10 دقائق | منخفض (ما تراه هو ما تحصل عليه) |
| إدخال البكسل القطري | متوسط | منخفضة | 20-40 دقيقة | متوسط |
التكوين عن بُعد عبر 4G
بالنسبة للكاميرات المتصلة بشبكة 4G في المواقع البعيدة، يمكنك إجراء تحديد المربع عن بُعد من خلال المنصة السحابية8. لا تحتاج إلى التواجد في الموقع بعد التثبيت الأولي. إذا تغيرت الظروف - على سبيل المثال، تم بناء سياج جديد أقرب إلى الكاميرا - يمكنك إعادة رسم مربعات الحجم الخاصة بك من مكتبك. تطبق الكاميرا الإعدادات الجديدة على الفور.
هذه ميزة كبيرة للمتكاملين الذين يديرون عشرات أو مئات المواقع البعيدة. يمكنك ضبط العتبات دون إرسال فني. لا حاجة لزيارة ميدانية. لا تكاليف سفر. فقط قم بتسجيل الدخول، وأعد الرسم، واحفظ.
الجمع بين تحديد المربع وتصنيف الذكاء الاصطناعي
يعمل مرشح الحجم جنبًا إلى جنب مع تصنيف الذكاء الاصطناعي9. حتى لو تجاوز كائن ما عتبة الحجم، يجب أن يجتاز مصنف الذكاء الاصطناعي. لذلك، إذا مرت كرة ثلج كبيرة عبر منطقتك وتجاوزت 2% من الإطار، فإن مصنف الذكاء الاصطناعي يتعرف عليها على أنها “ليست بشرية” و “ليست مركبة”. لا يتم إطلاق أي تنبيه. يمنحك هذا النهج المزدوج الطبقات - تصفية الحجم بالإضافة إلى تصنيف الذكاء الاصطناعي - أقل معدل إنذار كاذب ممكن مع الحفاظ على حساسية اكتشاف عالية للتهديدات الحقيقية.
الخاتمة
يعد تصفية حجم الهدف أحد أكثر الأدوات فعالية لتقليل الإنذارات الكاذبة في المراقبة عن بُعد للكاميرات المتحركة. قم بتعيين الحد الأدنى للعتبة من خلال تحديد المربع المرئي، وقم بالمعايرة في الموقع، ودع الذكاء الاصطناعي يتولى الباقي. إذا كنت بحاجة إلى مساعدة في تكوين هذا لمشروعك المحدد، فتواصل معي على sales05@.com.
1. شرح دقة 4 ميجابكسل وتأثيرها على جودة الصورة وكثافة البكسل. ︎↩︎ 2. نظرة عامة على أنظمة المراقبة التي تعمل بالجيل الرابع بالطاقة الشمسية وتحديات إدارة الطاقة الخاصة بها. ︎↩︎ 3. وصف تقني لترشيح حجم الكائن بناءً على القطر المستخدم في كاميرات المراقبة المتقدمة. ︎↩︎ 4. ما هو طقم تطوير البرامج وكيف يتيح التكامل المخصص. ︎↩︎ 5. تفاصيل حول نسب التقريب البصري وتأثيرها على قدرات المراقبة. ︎↩︎ 6. شرح لكيفية تشويه الاضطرابات الجوية والوهج الحراري للتصوير بعيد المدى. ︎↩︎ 7. كيف تعمل محركات PTZ وتداعيات استهلاكها للطاقة. ︎↩︎ 8. نظرة عامة على إدارة الكاميرات المستندة إلى السحابة وقدرات التكوين عن بُعد. ︎↩︎ 9. شرح لتصنيف الصور المستند إلى الذكاء الاصطناعي المستخدم في المراقبة الحديثة. ︎↩︎