
Uma vez perdi um contrato de R$12.000 porque uma PTZ de lente dupla saiu do alinhamento após três meses no calor do Texas. Essa falha me ensinou tudo sobre por que a calibração de fábrica é importante.
As fábricas alcançam o alinhamento de lentes em nível de milissegundo através de um processo de quatro estágios: alinhamento ativo robótico de 6-DOF no nível do mícron durante a montagem, varredura automatizada de MTF para validação de nitidez, compensação dinâmica de LUT no firmware para correção em tempo real e acionamento de clock mestre para sincronização de quadros em nível de nanossegundo entre os sensores.
 calibração de fábrica de câmera PTZ de lente dupla alinhamento
calibração de fábrica de câmera PTZ de lente dupla alinhamento
Abaixo, detalho cada etapa desta cadeia de calibração. Explicarei o mapeamento pixel-a-coordenada, opções de recalibração remota, precisão de rotação completa e prevenção de desvio térmico. Se você está adquirindo câmeras PTZ de lente dupla para infraestrutura crítica, este é o detalhe de engenharia que separa uma unidade confiável de um pesadelo de garantia.
Índice
Qual é o Processo de Mapeamento “Pixel-a-Coordenada” Usado para Sincronizar as Duas Lentes Durante a Produção?
Quando visitei pela primeira vez nosso laboratório de calibração, esperava ver técnicos com chaves de fenda. Em vez disso, vi robôs, lâmpadas UV e alvos gigantes em forma de tabuleiro de xadrez. A antiga maneira de alinhamento manual morreu.
O mapeamento pixel-a-coordenada é um processo de fábrica onde cada lente captura um alvo de calibração de precisão em cada nível de zoom. O software, então, registra o deslocamento exato de pixels entre os dois eixos ópticos e armazena esses dados como uma tabela de consulta (LUT) no firmware da câmera para correção em tempo real.
 mapeamento pixel a coordenada alvo de calibração lente dupla
mapeamento pixel a coordenada alvo de calibração lente dupla
Como o Alinhamento Físico Acontece Primeiro
Antes que qualquer mapeamento de software comece, as lentes devem ser posicionadas fisicamente com extrema precisão. Nossa fábrica usa braços robóticos de 6-DOF (seis graus de liberdade). Esses robôs ajustam o módulo da lente em seis direções: X, Y, Z, Inclinação, Ponta e Rotação. A precisão é no nível do micrômetro.
Veja como a sequência funciona. O módulo da câmera é ligado durante a montagem. Uma imagem ao vivo alimenta o algoritmo de alinhamento. O braço robótico segura a lente acima do sensor enquanto o adesivo óptico fica entre eles, ainda líquido. O algoritmo analisa um gráfico de teste Siemens Star1 em tempo real. Ele verifica o MTF (função de transferência de modulação)5 valor no centro e nos quatro cantos da imagem. Quando todas as cinco zonas atingem o pico de nitidez no mesmo instante, uma lâmpada UV dispara. O adesivo cura em cerca de 200 milissegundos. A lente agora está travada no lugar.
O Estágio de Mapeamento de Software
Após o alinhamento físico, a câmera é posicionada em frente a um alvo de calibração grande e de alta precisão em forma de tabuleiro de xadrez. O sistema, então, percorre todas as distâncias focais que a lente de zoom suporta. Em cada etapa de zoom, ele registra as coordenadas de pixel onde o mesmo ponto de referência aparece tanto na imagem de luz visível quanto na imagem térmica (ou na segunda lente visível).
O resultado é uma tabela de valores de deslocamento. Por exemplo, com zoom de 10X, o centro da imagem térmica pode estar 3 pixels à esquerda e 2 pixels para cima em comparação com o centro da imagem visível. Em Zoom de 40X8, esse deslocamento pode mudar para 7 pixels à direita e 1 pixel para baixo. Cada posição de zoom recebe seu próprio valor de correção.
Como a LUT Funciona em Tempo Real
Esta tabela de deslocamento é a LUT — a tabela de consulta. Ela é gravada no firmware da câmera antes que a unidade saia da fábrica. Quando você opera a PTZ e altera o nível de zoom, o processador lê a posição de zoom atual, consulta o deslocamento correspondente e comanda o motor da PTZ para microajustar. Isso acontece em milissegundos de um dígito. Você nunca percebe. As duas imagens apenas permanecem alinhadas.
| Estágio | O que acontece | Saída |
|---|---|---|
| Alinhamento físico | Robô 6-DOF posiciona a lente no sensor | Precisão mecânica em nível de mícron |
| Captura de alvo | Câmera captura tabuleiro de xadrez em todos os níveis de zoom | Dados brutos de deslocamento por distância focal |
| Geração de LUT | Algoritmo calcula (dx, dy) para cada etapa de zoom | Tabela de consulta de firmware |
| Correção em tempo de execução | Processador lê a LUT e ajusta a posição do motor | Compensação ao vivo em nível de milissegundo |
Por que isso importa para zoom 40X
Com zoom 1X, um pequeno desalinhamento é invisível. Mas o zoom amplia os erros. Um deslocamento do eixo óptico de 0,5 graus a 1X se torna um desvio aparente de 20 graus a 40X. O alvo sai da sua tela. É por isso que câmeras PTZ baratas “perdem o alvo” quando você aumenta o zoom. Elas pulam o processo de LUT inteiramente ou só calibraram em poucas posições de zoom em vez da faixa completa.
Posso Realizar uma “Calibração de Um Clique” Remota se as Lentes Desalinharem Após uma Tempestade?
Já tive instaladores me ligando às 2 da manhã porque uma tempestade tirou o alinhamento de sua PTZ. Enviar um técnico para um local remoto alimentado por energia solar custa mais do que a própria câmera. A recalibração remota não é um luxo — é um recurso de sobrevivência.
Sim. Nosso firmware PTZ suporta recalibração remota através da interface web ou integração VMS. O sistema reexecuta seu algoritmo interno de correção LUT usando um ponto de referência conhecido ou padrão de teste embutido, restaurando o alinhamento em nível de pixel sem a necessidade de uma visita técnica.
 interface web da câmera PTZ com calibração remota de um clique
interface web da câmera PTZ com calibração remota de um clique
O Que Pode Realmente Mudar Após uma Tempestade
Vento forte, impacto de granizo ou choque térmico podem causar microdeslocamentos na carcaça da PTZ. Os elementos da lente raramente se movem porque o adesivo curado por UV é extremamente forte. O que muda é a relação entre a posição “home” do gimbal PTZ e o eixo óptico real. Pense desta forma: a lente está boa, mas a plataforma em que ela está montada girou 0,1 graus. Com 40X, esses 0,1 graus se tornam um problema visível.
Como Funciona a Recalibração Remota
O processo tem três etapas:
- Aquisição de referência. A câmera aponta para um marco conhecido ou usa seu padrão de retículo eletrônico embutido. O firmware captura quadros de ambas as lentes simultaneamente.
- Recálculo de deslocamento. O processador onboard compara o deslocamento de pixel atual com a linha de base LUT de fábrica. Ele calcula a nova diferença.
- Atualização de compensação do motor. O firmware grava uma camada de correção sobre a LUT original. Os motores PTZ agora incluem esse deslocamento adicional em cada comando de movimento.
Todo esse processo leva menos de 30 segundos. Você o aciona pela GUI web da câmera ou através de uma chamada de API do seu VMS.
Limitações que você deve saber
A recalibração remota corrige desvios corrigíveis por software. Ela não pode corrigir danos físicos. Se uma pedra de granizo quebrar o vidro da cúpula ou entortar o suporte do gimbal, nenhum software poderá compensar. O sistema relatará uma “falha de calibração” se o deslocamento medido exceder a faixa de correção do motor. Nesse ponto, você precisará de uma visita ao local.
Quando Usar vs. Quando Chamar um Técnico
| Sintoma | Correção Remota Possível? | Ação |
|---|---|---|
| Leve deslocamento de imagem após evento de vento | Sim | Execute a recalibração de um clique |
| Deslocamento aumenta lentamente ao longo dos meses | Sim | Agende a autocaliibração periódica |
| Deslocamento grande súbito após impacto | Talvez | Tente correção remota; se falhar, envie técnico |
| Dano físico visível na cúpula ou suporte | Não | Visita ao local necessária |
| Imagem borrada ou perda de foco | Não | Provável deslocamento interno da lente; RMA necessário |
Para David e outros integradores que trabalham em áreas remotas — fazendas, campos de petróleo, fazendas solares — este recurso de recalibração remota reduz diretamente o custo total de propriedade. Uma visita técnica evitada paga a diferença de preço da câmera em relação a uma unidade mais barata que não possui essa capacidade.
A Calibração Mantém Sua Precisão em Toda a Rotação de 360 Graus do Módulo PTZ?
Testei uma unidade de um concorrente uma vez, girando-a em um círculo completo com zoom de 40X. Quando ela retornou à posição inicial, o alvo havia se deslocado 15 pixels. Isso não é calibração. Isso é uma sugestão.
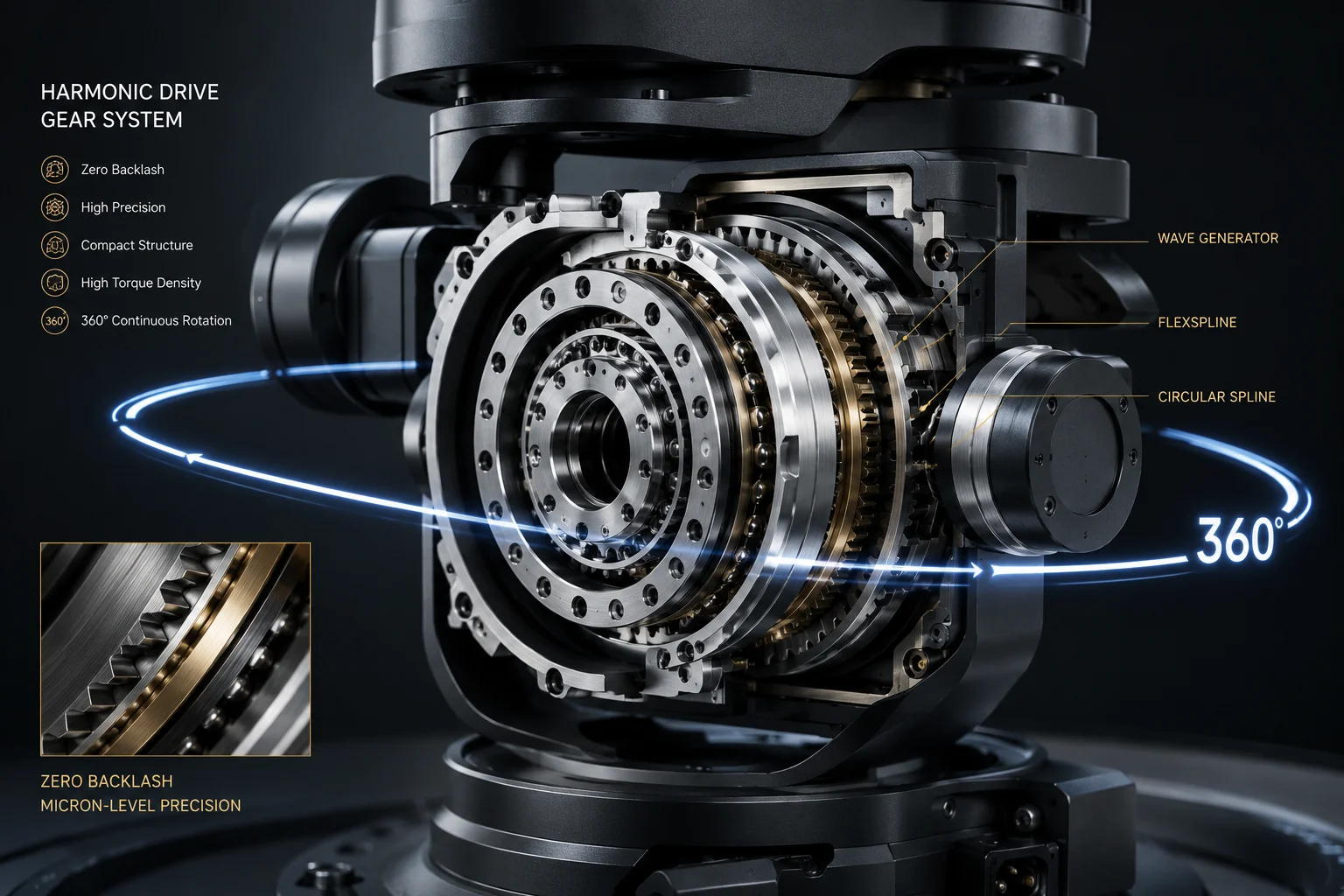
A verdadeira calibração deve se manter em todos os 360 graus de rotação e em todos os ângulos de inclinação. Nossa fábrica consegue isso mapeando a LUT não apenas por nível de zoom, mas por posição de rotação e inclinação, e usando engrenagens de acionamento harmônico de precisão que eliminam a folga no mecanismo de rotação.
 Teste de precisão de calibração de rotação de 360 graus PTZ
Teste de precisão de calibração de rotação de 360 graus PTZ
Por que a Rotação Introduz Erro
Uma câmera PTZ não é uma câmera fixa. Toda vez que o gimbal gira, as tolerâncias mecânicas se acumulam. Folga da engrenagem, estiramento da correia, jogo do rolamento — tudo isso cria pequenos erros de posição. Com zoom 1X, ninguém percebe. Com zoom 40X, uma folga de engrenagem de 0,01 grau se traduz em múltiplos pixels de desvio.
Existem dois tipos de erro de rotação:
- Erro sistemático: Deslocamentos repetíveis que ocorrem na mesma posição todas as vezes. Estes vêm do espaçamento dos dentes da engrenagem, excentricidade de montagem ou arrasto do cabo.
- Erro aleatório: Tremor não repetível devido ao desgaste do rolamento, vibração ou expansão térmica. Estes são mais difíceis de compensar.
Como a Fábrica Lida com Erro Sistemático
Durante os testes de produção, a PTZ é comandada a girar por toda a sua faixa em passos finos. Em cada passo, o sistema mede a direção real de apontamento em relação à direção comandada. A diferença é registrada. Isso cria uma segunda tabela de consulta — um mapa de correção de rotação e inclinação.
Este mapa funciona em conjunto com a LUT de zoom. Assim, quando você comanda a câmera para girar em 127,3 graus e dar zoom em 35X, o firmware aplica duas correções simultaneamente: uma para o deslocamento óptico dependente do zoom e outra para o deslocamento mecânico dependente da posição.
Engrenagens Harmonic Drive: A Solução de Hardware
A correção de software tem limites. Se o erro mecânico for muito grande ou muito aleatório, nenhuma LUT pode corrigi-lo. É por isso que a seleção da engrenagem é enormemente importante.
Nossos módulos PTZ usam engrenagens harmonic drive3 (também chamadas de engrenagens de onda de tensão). Estas têm folga quase zero — tipicamente abaixo de 1 minuto de arco. Compare isso com engrenagens retas padrão, que podem ter 10-20 minutos de arco de folga.
O Protocolo de Teste de Círculo Completo
Antes que qualquer unidade seja enviada, ela executa um teste de repetibilidade de círculo completo:
- A câmera aponta para um alvo de referência.
- A câmera gira 360 graus e retorna à mesma posição comandada.
- O sistema mede o deslocamento de pixels entre o quadro original e o quadro de retorno.
- Critérios de aprovação: o deslocamento deve ser inferior a 2 pixels no zoom máximo.
Se uma unidade falhar neste teste, ela retorna à estação de ajuste mecânico. Não há solução de software para engrenagens ruins.
O que isso significa para aplicações de rastreamento
Se você usar Rastreamento automático de IA6 — onde a câmera segue uma pessoa ou veículo — a deriva de calibração durante a rotação significa que a caixa de rastreamento se afastará lentamente do alvo. A IA tentará corrigir, criando um movimento irregular e oscilante. Com a calibração adequada de rotação completa, o rastreamento permanece suave porque a plataforma mecânica entrega exatamente o que o software comanda.
Como Vocês Evitam que a Expansão Térmica Afete o Alinhamento de Coordenadas de Lente Dupla ao Longo do Tempo?
Já vi câmeras que funcionam perfeitamente em laboratório a 25°C e se desfazem a 60°C em um telhado no Arizona. A deriva térmica é o assassino silencioso da precisão de calibração a longo prazo.
Evitamos a deriva térmica através de três métodos: materiais com CTE (Coeficiente de Expansão Térmica) combinados na carcaça da lente, ajuste em tempo real da LUT compensado pela temperatura no firmware e um teste de estresse de ciclo térmico de 72 horas durante a produção que valida a estabilidade de -40°C a +70°C.
 câmara de teste de expansão térmica calibração de câmera PTZ
câmara de teste de expansão térmica calibração de câmera PTZ
Por que o calor move suas lentes
Todo material se expande quando aquecido. O alumínio se expande cerca de 23 micrômetros por metro por grau Celsius. O aço se expande cerca de 12. O vidro se expande cerca de 8. Quando o corpo da sua câmera é de alumínio, o cano da sua lente é de aço e os elementos da sua lente são de vidro, todos eles se expandem em taxas diferentes.
Uma variação de temperatura de 40°C (manhã para tarde em um deserto) pode mover os elementos da lente em vários micrômetros em relação ao sensor. Em zoom alto, vários micrômetros de deslocamento físico equivalem a vários pixels de deslocamento de imagem. Seu alinhamento cuidadosamente calibrado se desvia.
Seleção de Material: A Primeira Defesa
A solução mais eficaz é prevenir o problema na origem. Nossas montagens ópticas usam materiais com coeficientes de expansão térmica combinados sempre que possível.
| Componente | Escolha de Material | CTE (μm/m/°C) | Por que Este Material |
|---|---|---|---|
| Corpo da lente | Liga de magnésio | 26 | Leve, forte, próximo ao CTE do alumínio |
| Montagem do sensor | Liga Invar4 | 1.2 | Expansão quase zero mantém a posição do sensor |
| Espaçadores da lente | Cerâmica | 6-8 | Combina com o CTE do vidro, mantém os elementos alinhados |
| Corpo principal | Alumínio fundido sob pressão | 23 | Padrão, econômico, previsível |
A interface crítica é entre o sensor e o último elemento da lente. Ao usar Invar (uma liga de níquel-ferro com expansão térmica quase zero) para a montagem do sensor, mantemos a distância sensor-lente constante, independentemente da temperatura.
Compensação Térmica em Nível de Firmware
A correspondência de materiais reduz a deriva, mas não a elimina completamente. O erro restante é tratado no firmware.
Cada câmera possui um sensor de temperatura interno. O firmware lê este sensor continuamente. Com base na temperatura atual, ele aplica um deslocamento de correção térmica à LUT base. Este deslocamento foi caracterizado durante o teste de ciclagem térmica de fábrica.
Aqui está a lógica:
- A 25°C (temperatura de referência), a LUT base é aplicada com deslocamento térmico zero.
- A 50°C, o firmware adiciona uma correção pré-medida — talvez +1 pixel em X e -0,5 pixel em Y.
- A -20°C, ele aplica uma correção diferente na direção oposta.
Esta compensação é executada continuamente em segundo plano. Você nunca a vê. O alinhamento simplesmente permanece estável.
O Teste de Ciclagem Térmica de 72 Horas
Durante a produção, cada unidade passa 72 horas em uma câmara térmica. A câmara cicla repetidamente entre -40°C e +70°C. Em cada extremo de temperatura e em vários pontos intermediários, o sistema de teste automatizado captura quadros de calibração e mede o alinhamento.
Este teste serve a dois propósitos. Primeiro, valida que a unidade mantém o alinhamento em sua faixa de temperatura nominal. Segundo, gera os dados de compensação térmica que são armazenados no firmware. Unidades que apresentam deriva excessiva ou imprevisível em qualquer ponto de temperatura são rejeitadas.
Efeitos de Envelhecimento a Longo Prazo
Mesmo com todas essas medidas, os materiais envelhecem. Adesivos podem sofrer fluência sob estresse térmico sustentado. Plásticos podem deformar. É por isso que nosso adesivo óptico curado por UV2 é especificamente escolhido por sua baixa taxa de fluência e alta temperatura de transição vítrea (Tg > 150°C). Ele não amolecerá nem fluirá sob nenhuma temperatura operacional que a câmera encontrar.
Para David e outros integradores que implementam em climas extremos — seja um campo de petróleo no Texas a 50°C ou um local na fronteira canadense a -35°C — essa engenharia térmica é o que mantém suas câmeras precisas ano após ano sem visitas de recalibração.
Conclusão
A calibração de milissegundos em nível de fábrica é um sistema de quatro camadas: alinhamento físico robótico, mapeamento LUT de alcance total, compensação de temperatura e sincronização de quadro acionada por hardware. Quando essas camadas trabalham juntas, sua PTZ de lente dupla permanece pixel-precisa do Dia 1 ao Ano 5, em todos os níveis de zoom, todos os ângulos de rotação e todas as condições climáticas.
1. Descubra como o gráfico de teste estrela de Siemens é usado para testes de resolução óptica. ︎↩︎ 2. Entenda o papel dos adesivos curados por UV na montagem de lentes de precisão. ︎↩︎ 3. Aprenda como as engrenagens de acionamento harmônico fornecem folga quase zero para rotação PTZ. ︎↩︎ 4. Explore como a baixa expansão térmica do Invar estabiliza a posição do sensor. ︎↩︎ 5. Compreenda a medida padrão de nitidez da lente usada na calibração. ︎↩︎ 6. Aprenda como o rastreamento automático impulsionado por IA depende de uma calibração precisa para manter o bloqueio do alvo. ︎↩︎ 7. Compreenda o processo fundamental de mapeamento de posições de pixels para coordenadas do mundo real. ︎↩︎ 8. Aprenda como o zoom óptico amplia os erros de alinhamento e por que a calibração de alcance total é crítica. ︎↩︎