
Una vez perdí un contrato de 12.000 $ porque una PTZ de doble lente se desalineó después de tres meses bajo el calor de Texas. Ese fallo me enseñó todo sobre por qué la calibración de fábrica es importante.
Las fábricas logran la alineación de lentes a nivel de milisegundos a través de un proceso de cuatro etapas: alineación activa robótica de 6 DOF a nivel de micrones durante el ensamblaje, escaneo automatizado de MTF para validación de nitidez, compensación dinámica de LUT en firmware para corrección en tiempo real y activación de reloj maestro para sincronización de fotogramas a nivel de nanosegundos entre sensores.
 calibración de fábrica de cámara PTZ de doble lente alineación
calibración de fábrica de cámara PTZ de doble lente alineación
A continuación, desgloso cada paso de esta cadena de calibración. Explicaré el mapeo de píxeles a coordenadas, las opciones de recalibración remota, la precisión de rotación completa y la prevención de la deriva térmica. Si está adquiriendo cámaras PTZ de doble lente para infraestructura crítica, este es el detalle de ingeniería que separa una unidad confiable de una pesadilla de garantía.
Índice
¿Cuál es el proceso de mapeo de “píxeles a coordenadas” utilizado para sincronizar las dos lentes durante la producción?
Cuando visité por primera vez nuestro laboratorio de calibración, esperaba ver técnicos con destornilladores. En cambio, vi robots, lámparas UV y objetivos gigantes de tablero de ajedrez. La vieja forma de alineación manual está muerta.
El mapeo de píxeles a coordenadas es un proceso de fábrica donde cada lente captura un objetivo de calibración de precisión en cada nivel de zoom. Luego, el software registra el desplazamiento exacto de píxeles entre los dos ejes ópticos y almacena estos datos como una tabla de consulta (LUT) en el firmware de la cámara para corrección en tiempo real.
 mapeo de píxeles a coordenadas objetivo de calibración doble lente
mapeo de píxeles a coordenadas objetivo de calibración doble lente
Cómo ocurre primero la alineación física
Antes de que comience cualquier mapeo de software, las lentes deben posicionarse físicamente con extrema precisión. Nuestra fábrica utiliza brazos robóticos de 6 DOF (seis grados de libertad). Estos robots ajustan el módulo de la lente en seis direcciones: X, Y, Z, Inclinación, Punta y Rotación. La precisión es a nivel de micrómetro.
Así es como funciona la secuencia. El módulo de la cámara se enciende durante el ensamblaje. Una imagen en vivo se introduce en el algoritmo de alineación. El brazo robótico sostiene la lente sobre el sensor mientras el adhesivo óptico se encuentra entre ellos, aún líquido. El algoritmo analiza un gráfico de prueba Siemens Star1 en tiempo real. Comprueba el MTF (función de transferencia de modulación)5 valor en el centro y en las cuatro esquinas de la imagen. Cuando las cinco zonas alcanzan la máxima nitidez en el mismo instante, se dispara una lámpara UV. El adhesivo se cura en aproximadamente 200 milisegundos. La lente ahora está fijada en su lugar.
La etapa de mapeo de software
Después de la alineación física, la cámara se enfrenta a un objetivo de calibración de tablero de ajedrez grande y de alta precisión. Luego, el sistema recorre cada distancia focal que admite la lente de zoom. En cada paso de zoom, registra las coordenadas de píxeles donde el mismo punto de referencia aparece tanto en la imagen de luz visible como en la imagen térmica (o la segunda lente visible).
El resultado es una tabla de valores de desplazamiento. Por ejemplo, con un zoom de 10X, el centro de la imagen térmica podría estar 3 píxeles a la izquierda y 2 píxeles hacia arriba en comparación con el centro de la imagen visible. En Zoom 40X8, ese desplazamiento podría cambiar a 7 píxeles a la derecha y 1 píxel hacia abajo. Cada posición de zoom obtiene su propio valor de corrección.
Cómo funciona la LUT en tiempo real
Esta tabla de desplazamiento es la LUT — la tabla de consulta. Se graba en el firmware de la cámara antes de que la unidad salga de fábrica. Cuando opera la PTZ y cambia el nivel de zoom, el procesador lee la posición de zoom actual, busca el desplazamiento correspondiente y ordena al motor de la PTZ que realice un microajuste. Esto ocurre en milisegundos de un solo dígito. Nunca lo ves. Las dos imágenes simplemente permanecen alineadas.
| Etapa | Qué ocurre | Salida |
|---|---|---|
| Alineación física | El robot 6-DOF posiciona la lente en el sensor | Precisión mecánica a nivel de micras |
| Captura de objetivo | La cámara captura un tablero de ajedrez en todos los niveles de zoom | Datos de desplazamiento brutos por distancia focal |
| Generación de LUT | El algoritmo calcula (dx, dy) para cada paso de zoom | Tabla de consulta de firmware |
| Corrección en tiempo de ejecución | El procesador lee la LUT y ajusta la posición del motor | Compensación en vivo a nivel de milisegundos |
Por qué esto es importante para el zoom 40X
Con un zoom de 1X, un pequeño desajuste es invisible. Pero el zoom magnifica los errores. Un desplazamiento del eje óptico de 0.5 grados a 1X se convierte en un desplazamiento aparente de 20 grados a 40X. El objetivo se sale de su pantalla. Es por eso que las cámaras PTZ baratas “pierden el objetivo” cuando se acerca el zoom. O bien omiten el proceso de LUT por completo o solo calibran en unas pocas posiciones de zoom en lugar del rango completo.
¿Puedo realizar una “calibración de un clic” remota si las lentes se desalinean después de una tormenta?
He tenido instaladores llamándome a las 2 AM porque una tormenta desalineó su PTZ. Enviar un técnico a un sitio remoto con energía solar cuesta más que la propia cámara. La recalibración remota no es un lujo, es una característica de supervivencia.
Sí. Nuestro firmware PTZ admite la recalibración remota a través de la interfaz web o la integración VMS. El sistema vuelve a ejecutar su algoritmo interno de corrección LUT utilizando un punto de referencia conocido o un patrón de prueba incorporado, restaurando la alineación a nivel de píxel sin necesidad de una visita técnica.
 calibración remota de un clic cámara PTZ interfaz web
calibración remota de un clic cámara PTZ interfaz web
¿Qué puede desplazarse realmente después de una tormenta?
El viento fuerte, el impacto del granizo o el choque térmico pueden causar microdesplazamientos en la carcasa de la PTZ. Los elementos de la lente rara vez se mueven porque el adhesivo curado con UV es extremadamente fuerte. Lo que se mueve es la relación entre la posición “home” del cardán PTZ y el eje óptico real. Piénselo de esta manera: la lente está bien, pero la plataforma sobre la que se asienta ha girado 0,1 grados. A 40X, esos 0,1 grados se convierten en un problema visible.
Cómo funciona la recalibración remota
El proceso tiene tres pasos:
- Adquisición de referencia. La cámara apunta a un punto de referencia conocido o utiliza su patrón de retícula electrónica incorporado. El firmware captura fotogramas de ambas lentes simultáneamente.
- Recálculo de desplazamiento. El procesador a bordo compara el desplazamiento de píxeles actual con la línea base LUT de fábrica. Calcula la nueva diferencia.
- Actualización de compensación del motor. El firmware escribe una capa de corrección sobre la LUT original. Los motores PTZ ahora incluyen este desplazamiento adicional en cada comando de movimiento.
Todo este proceso dura menos de 30 segundos. Lo activa desde la GUI web de la cámara o a través de una llamada API desde su VMS.
Limitaciones que debe conocer
La recalibración remota soluciona la deriva corregible por software. No puede solucionar daños físicos. Si una piedra de granizo agrieta el cristal de la cúpula o dobla el soporte del cardán, ningún software puede compensarlo. El sistema informará de un “fallo de calibración” si el desplazamiento medido excede el rango de corrección del motor. En ese momento, necesita una visita al sitio.
Cuándo usarlo y cuándo llamar a un técnico
| Síntoma | ¿Reparación remota posible? | Acción |
|---|---|---|
| Ligero desplazamiento de imagen después de un evento de viento | Sí | Ejecute la recalibración de un clic |
| El desplazamiento aumenta lentamente con el tiempo | Sí | Programe la recalibración automática periódica |
| Desplazamiento grande repentino después del impacto | Quizás | Intente la reparación remota; si falla, envíe un técnico |
| Daño físico visible en la cúpula o el soporte | No | Se requiere visita al sitio |
| Imagen borrosa o pérdida de enfoque | No | Probable desplazamiento interno de la lente; se necesita RMA |
Para David y otros integradores que trabajan en áreas remotas — ranchos, campos petroleros, granjas solares — esta función de recalibración remota reduce directamente su costo total de propiedad. Una visita de técnico evitada paga la diferencia de precio de la cámara con respecto a una unidad más barata que carece de esta capacidad.
¿Mantiene la calibración su precisión en toda la rotación de 360 grados del módulo PTZ?
Una vez probé una unidad de la competencia girándola en un círculo completo con un zoom de 40X. Para cuando regresó a la posición inicial, el objetivo se había desplazado 15 píxeles. Eso no es calibración. Eso es una sugerencia.
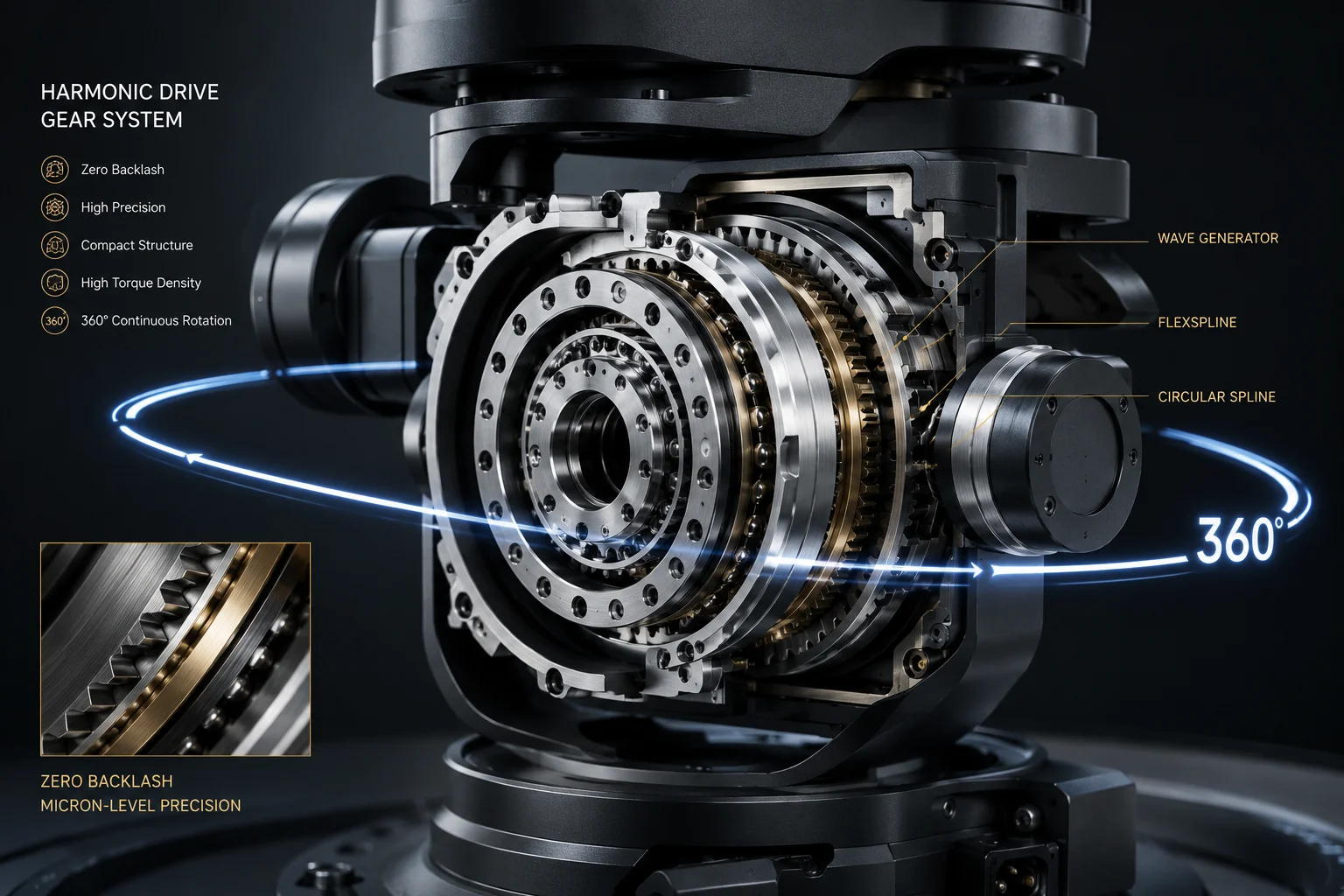
La verdadera calibración debe mantenerse en los 360 grados de giro y en todos los ángulos de inclinación. Nuestra fábrica logra esto mapeando la LUT no solo por nivel de zoom, sino por posición de giro-inclinación, y utilizando engranajes de accionamiento armónico de precisión que eliminan el juego en el mecanismo de rotación.
 Prueba de precisión de calibración de rotación PTZ de 360 grados
Prueba de precisión de calibración de rotación PTZ de 360 grados
Por qué la rotación introduce errores
Una cámara PTZ no es una cámara fija. Cada vez que el cardán gira, las tolerancias mecánicas se suman. El juego de los engranajes, la elasticidad de la correa, el juego de los rodamientos — todo esto crea pequeños errores de posición. Con un zoom de 1X, nadie se da cuenta. Con un zoom de 40X, un juego de engranajes de 0.01 grados se traduce en múltiples píxeles de deriva.
Hay dos tipos de error de rotación:
- Error sistemático: Desplazamientos repetibles que ocurren en la misma posición cada vez. Provienen del espaciado de los dientes del engranaje, la excentricidad del montaje o la resistencia del cable.
- Error aleatorio: Vibración no repetible por desgaste de rodamientos, vibración o expansión térmica. Estos son más difíciles de compensar.
Cómo la fábrica maneja el error sistemático
Durante las pruebas de producción, se ordena a la PTZ que gire en todo su rango en pasos finos. En cada paso, el sistema mide la dirección de apuntamiento real frente a la dirección comandada. Se registra la diferencia. Esto crea una segunda tabla de búsqueda — un mapa de corrección de giro-inclinación.
Este mapa funciona junto con la LUT de zoom. Por lo tanto, cuando ordena a la cámara que gire a 127.3 grados y haga zoom a 35X, el firmware aplica dos correcciones simultáneamente: una para el desplazamiento óptico dependiente del zoom y otra para el desplazamiento mecánico dependiente de la posición.
Engranajes Harmonic Drive: La Solución de Hardware
La corrección por software tiene límites. Si el error mecánico es demasiado grande o demasiado aleatorio, ninguna LUT puede solucionarlo. Es por eso que la selección de engranajes es enormemente importante.
Nuestros módulos PTZ utilizan engranajes Harmonic Drive3 (también llamados engranajes de onda de deformación). Estos tienen una holgura casi nula, típicamente inferior a 1 minuto de arco. Compárelo con los engranajes rectos estándar, que pueden tener de 10 a 20 minutos de arco de holgura.
El Protocolo de Prueba de Círculo Completo
Antes de que se envíe cualquier unidad, realiza una prueba de repetibilidad de círculo completo:
- La cámara apunta a un objetivo de referencia.
- La cámara gira 360 grados y regresa a la misma posición comandada.
- El sistema mide el desplazamiento de píxeles entre el fotograma original y el fotograma de retorno.
- Criterios de aprobación: el desplazamiento debe ser inferior a 2 píxeles con el zoom máximo.
Si una unidad falla esta prueba, regresa a la estación de ajuste mecánico. No hay una solución de software para engranajes defectuosos.
Lo que esto significa para las aplicaciones de seguimiento
Si utiliza Seguimiento automático de IA6 — donde la cámara sigue a una persona o vehículo — la deriva de calibración durante la rotación significa que el cuadro de seguimiento se alejará lentamente del objetivo. La IA intentará corregir, creando un movimiento brusco y oscilante. Con una calibración adecuada de rotación completa, el seguimiento se mantiene suave porque la plataforma mecánica entrega exactamente lo que el software comanda.
¿Cómo evita que la expansión térmica afecte la alineación de coordenadas de doble lente con el tiempo?
He visto cámaras que funcionan perfectamente en el laboratorio a 25 °C y se desmoronan a 60 °C en una azotea en Arizona. La deriva térmica es el asesino silencioso de la precisión de calibración a largo plazo.
Evitamos la deriva térmica a través de tres métodos: materiales con CTE (Coeficiente de Expansión Térmica) coincidentes en la carcasa de la lente, ajuste de LUT compensado por temperatura en tiempo real en el firmware y una prueba de estrés de ciclo térmico de 72 horas durante la producción que valida la estabilidad de -40 °C a +70 °C.
 cámara de prueba de expansión térmica calibración de cámara PTZ
cámara de prueba de expansión térmica calibración de cámara PTZ
Por qué el calor mueve sus lentes
Todos los materiales se expanden al calentarse. El aluminio se expande unos 23 micrómetros por metro por grado Celsius. El acero se expande unos 12. El vidrio se expande unos 8. Cuando la carcasa de su cámara es de aluminio, el barril de su lente es de acero y los elementos de su lente son de vidrio, todos se expanden a diferentes velocidades.
Un cambio de temperatura de 40 °C (de la mañana a la tarde en un desierto) puede mover los elementos de la lente varios micrómetros en relación con el sensor. Con un zoom alto, varios micrómetros de desplazamiento físico equivalen a varios píxeles de desplazamiento de imagen. Su alineación cuidadosamente calibrada se desvía.
Selección de materiales: La primera defensa
La solución más eficaz es prevenir el problema en la fuente. Nuestros ensamblajes ópticos utilizan materiales con coeficientes de expansión térmica coincidentes siempre que sea posible.
| Componente | Elección de materiales | CTE (μm/m/°C) | Por qué este material |
|---|---|---|---|
| Carcasa de la lente | Aleación de magnesio | 26 | Ligera, resistente, CTE cercana a la del aluminio |
| Montura del sensor | Aleación Invar4 | 1.2 | Expansión casi nula mantiene la posición del sensor |
| Espaciadores de la lente | Cerámica | 6-8 | Coincide con el CTE del vidrio, mantiene los elementos alineados |
| Carcasa principal | Aluminio fundido a presión | 23 | Estándar, rentable, predecible |
La interfaz crítica está entre el sensor y el último elemento de la lente. Al utilizar Invar (una aleación de níquel-hierro con expansión térmica casi nula) para la montura del sensor, mantenemos la distancia sensor-lente constante independientemente de la temperatura.
Compensación térmica a nivel de firmware
La coincidencia de materiales reduce la deriva, pero no la elimina por completo. El error restante se maneja en el firmware.
Cada cámara tiene un sensor de temperatura interno. El firmware lee este sensor continuamente. Basándose en la temperatura actual, aplica un desplazamiento de corrección térmica a la LUT base. Este desplazamiento se caracterizó durante la prueba de ciclado térmico de fábrica.
Aquí está la lógica:
- A 25 °C (temperatura de referencia), la LUT base se aplica con un desplazamiento térmico cero.
- A 50 °C, el firmware agrega una corrección pre-medida, quizás +1 píxel en X y -0.5 píxeles en Y.
- A -20 °C, aplica una corrección diferente en la dirección opuesta.
Esta compensación se ejecuta continuamente en segundo plano. Nunca la ves. La alineación simplemente se mantiene estable.
Prueba de ciclado térmico de 72 horas
Durante la producción, cada unidad pasa 72 horas en una cámara térmica. La cámara cicla repetidamente entre -40 °C y +70 °C. En cada extremo de temperatura y en varios puntos intermedios, el sistema de prueba automatizado captura fotogramas de calibración y mide la alineación.
Esta prueba tiene dos propósitos. Primero, valida que la unidad mantiene la alineación en su rango de temperatura nominal. Segundo, genera los datos de compensación térmica que se almacenan en el firmware. Se rechazan las unidades que muestran una deriva excesiva o impredecible en cualquier punto de temperatura.
Efectos del envejecimiento a largo plazo
Incluso con todas estas medidas, los materiales envejecen. Los adhesivos pueden arrastrarse bajo estrés térmico sostenido. Los plásticos pueden deformarse. Es por eso que nuestro adhesivo óptico curado con UV2 se elige específicamente por su baja tasa de fluencia y alta temperatura de transición vítrea (Tg > 150 °C). No se ablandará ni fluirá bajo ninguna temperatura de operación que la cámara pueda encontrar.
Para David y otros integradores que implementan en climas extremos, ya sea un campo petrolero de Texas a 50 °C o un sitio en la frontera canadiense a -35 °C, esta ingeniería térmica es lo que mantiene sus cámaras precisas año tras año sin visitas de recalibración.
Conclusión
La calibración de milisegundos a nivel de fábrica es un sistema de cuatro capas: alineación física robótica, mapeo LUT de rango completo, compensación de temperatura y sincronización de fotogramas activada por hardware. Cuando estas capas trabajan juntas, su PTZ de doble lente se mantiene preciso a nivel de píxel desde el día 1 hasta el año 5, en todos los niveles de zoom, todos los ángulos de rotación y todas las condiciones climáticas.
1. Descubra cómo se utiliza la carta de prueba de estrella de Siemens para la prueba de resolución óptica. ︎↩︎ 2. Comprenda el papel de los adhesivos curados con UV en el ensamblaje de lentes de precisión. ︎↩︎ 3. Aprenda cómo los engranajes de transmisión armónica proporcionan un juego casi nulo para la rotación PTZ. ︎↩︎ 4. Explore cómo la baja expansión térmica del Invar estabiliza la posición del sensor. ︎↩︎ 5. Comprender la medida estándar de nitidez de la lente utilizada en la calibración. ︎↩︎ 6. Aprender cómo el seguimiento automático impulsado por IA depende de una calibración precisa para mantener el bloqueo del objetivo. ︎↩︎ 7. Comprender el proceso fundamental de mapeo de posiciones de píxeles a coordenadas del mundo real. ︎↩︎ 8. Aprender cómo el zoom óptico magnifica los errores de alineación y por qué la calibración de rango completo es crítica. ︎↩︎