
Já vi muitas câmeras PTZ que dizem ter 255 predefinições, mas que engasgam após as primeiras 10. Se estiver criando sistemas de vigilância em larga escala, você precisa saber o que realmente acontece quando você pressiona “Go to Preset”.”
Uma câmera PTZ bem projetada completa uma chamada predefinida de 180 graus em menos de 1,5 segundo. O backend armazena contagens absolutas de pulso do motor, posição de zoom e dados de foco para todas as 255 predefinições em uma memória não volátil. A latência lógica desde o recebimento do comando até a ativação do motor é inferior a 50 ms. O verdadeiro gargalo de velocidade é sempre o motor físico de pan e tilt, não a pesquisa de predefinições.
 Velocidade de resposta predefinida da câmera PTZ e lógica de back-end
Velocidade de resposta predefinida da câmera PTZ e lógica de back-end
Abaixo, detalho as quatro perguntas que mais ouço de integradores de sistemas como David Miller - pessoas que operam centenas de câmeras em locais de trabalho e não podem permitir que uma única predefinição sofra desvios ou atrasos. Vamos entrar em detalhes.
Quantos milissegundos são necessários para chamar uma predefinição localizada a 180 graus de distância?
Todo integrador com quem trabalho faz essa pergunta primeiro. Uma chamada predefinida lenta significa eventos perdidos, tempo de gravação desperdiçado e clientes finais irritados. A velocidade não é opcional - ela é a linha de base.
Chamar uma predefinição a 180 graus de distância leva menos de 1,5 segundo no total. A latência lógica - do recebimento do comando à partida do motor - é inferior a 50 ms. O restante do tempo é a rotação física. Nossos motores de panorâmica atingem de 240°/s a 300°/s e os motores de inclinação atingem de 160°/s a 200°/s. A câmera acelera, gira, desacelera e trava no alvo dentro dessa janela de 1,5 segundo.
 Velocidade de chamada predefinida da câmera PTZ Tempo de rotação de 180 graus
Velocidade de chamada predefinida da câmera PTZ Tempo de rotação de 180 graus
Detalhando as duas partes da “velocidade de resposta”
Quando as pessoas dizem “velocidade de resposta”, geralmente confundem duas coisas muito diferentes. Deixe-me separá-las claramente.
Parte 1: Latência lógica. Esse é o tempo entre o recebimento da câmera e o Chamada predefinida e o motor começa a se mover de fato. Em nossas câmeras PTZ industriais, o principal SoC 1 lê as coordenadas predefinidas da memória flash e as converte em sinais de pulso do motor. Isso leva menos de 50 milissegundos. Quer você chame a predefinição 1 ou a predefinição 255, o tempo de pesquisa é o mesmo. O número da predefinição não torna as coisas mais lentas. A estrutura de dados é uma tabela plana - cada entrada é acessada em tempo constante.
Parte 2: Rotação física. É aqui que entra o tempo real. A câmera precisa girar fisicamente os motores de panorâmica e inclinação do ponto A ao ponto B. É isso que determina quanto tempo isso leva:
| Fator | Valor típico | Impacto na velocidade |
|---|---|---|
| Velocidade máxima do motor da panela | 240°/s - 300°/s | Ângulo maior = mais tempo |
| Velocidade máxima do motor de inclinação | 160°/s - 200°/s | Os movimentos verticais são mais lentos |
| Reposicionamento do zoom | Depende da distância focal | Os lançamentos de zoom longos adicionam 0,3 a 0,5s |
| Reaquisição de foco | Simultaneamente com a rotação | Nenhum atraso extra se o foco preditivo for usado |
| Curva de aceleração/desaceleração | Rampa suave integrada ao firmware | Adiciona ~0,2s a cada movimento |
Por que “menos de 1,5 segundo” é importante em implementações reais
Deixe-me colocar isso em contexto. Se você executar uma ronda com 16 predefinições e cada chamada de predefinição desperdiçar 4 segundos (como fazem muitas câmeras PTZ baratas), você perderá mais de um minuto por ciclo apenas em transições. Esse é um minuto de pontos cegos. Com nossas câmeras, o mesmo tour de 16 predefinições perde menos de 24 segundos em transições. Essa diferença se soma à operação 24 horas por dia, 7 dias por semana.
O fator oculto: Zoom e foco simultâneos
Muitas câmeras PTZ de baixo custo movem os motores de pan/tilt primeiro, depois ajustam o zoom e, em seguida, procuram o foco. Isso adiciona de 2 a 3 segundos de filmagem borrada após cada chamada predefinida. Nossa lógica de back-end armazena o posição do motor de foco ao lado de cada predefinição. Quando a câmera começa a girar, os motores de zoom e foco se movem ao mesmo tempo. O resultado: quando a rotação é interrompida, a imagem já está nítida. Não há “caça ao foco”. Sem segundos borrados. Isso é o que chamamos de Foco instantâneo, e é um resultado direto de como o backend armazena e recupera dados predefinidos.
E quanto ao atraso da rede?
Se você usar ONVIF sobre IP, a rede adicionará 1 a 50 ms de latência em uma LAN local. Em uma conexão 4G, espere 30 a 150 ms. Sobre RS-485 com Protocolo Pelco-D 2, O comando em si é transmitido em microssegundos. Em todos os casos, o atraso da rede é pequeno em comparação com o tempo de rotação física. Ele não é o gargalo.
Posso priorizar predefinições específicas em um “Guard Tour” com diferentes tempos de espera?
Essa é uma pergunta que recebo de todos os integradores sérios. Uma ronda de vigilância que trata todas as predefinições da mesma forma é quase inútil. Você precisa olhar fixamente para o portão principal por 30 segundos, mas só olhar para o estacionamento por 5 segundos.
Sim. Nossas câmeras PTZ suportam até 8 rondas de cruzeiro independentes (rondas de guarda), cada uma contendo até 32 predefinições. Cada predefinição em uma ronda pode ter seu próprio tempo de permanência, sua própria velocidade de movimento e sua própria prioridade de sequência. Você pode configurar isso por meio da interface da Web, do NVR ou de comandos ONVIF.
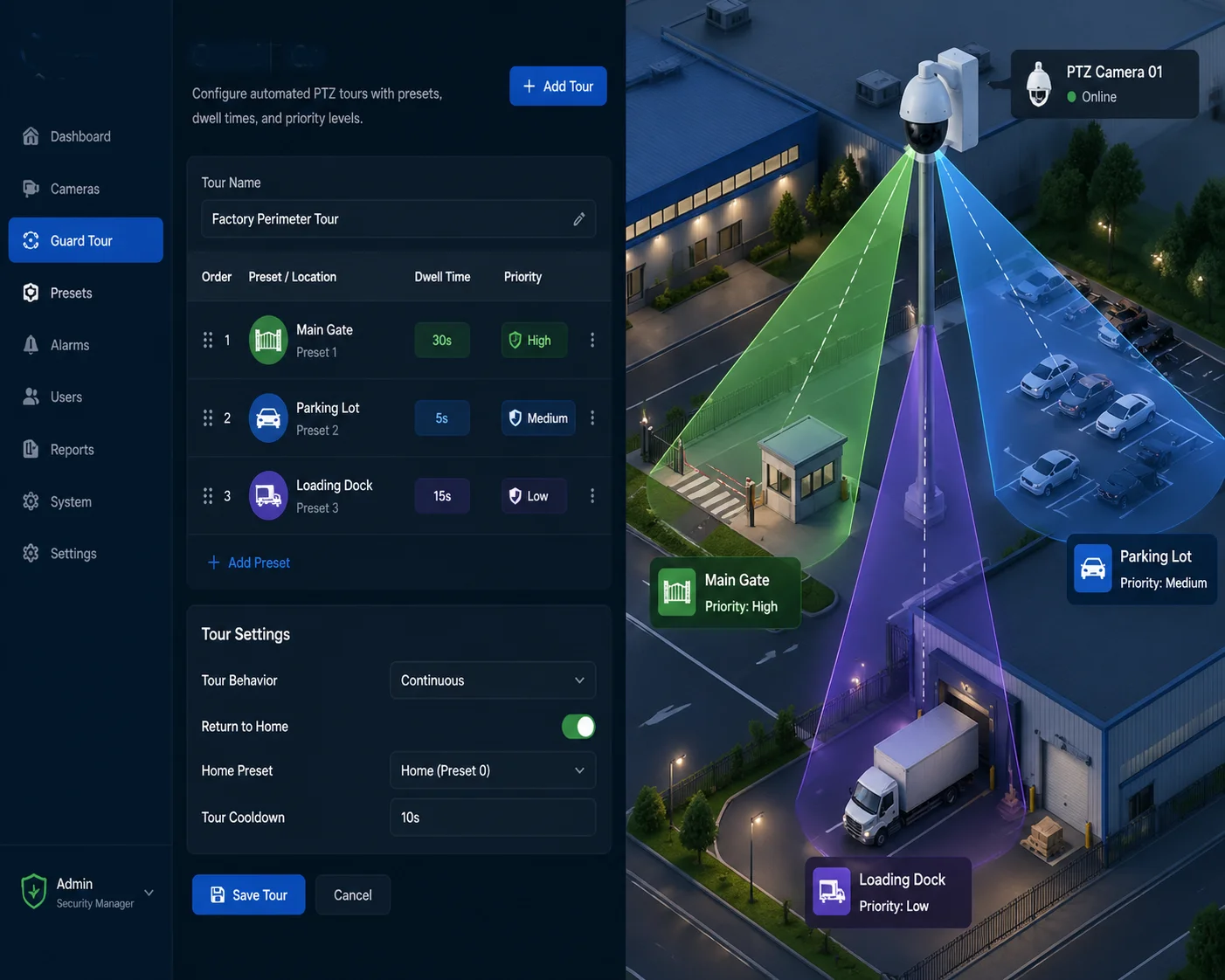 Configuração do tempo de permanência predefinido da ronda de guarda PTZ
Configuração do tempo de permanência predefinido da ronda de guarda PTZ
Como os Guard Tours realmente funcionam no back-end
Uma ronda de guarda é um loop simples armazenado no firmware da câmera. Cada entrada no loop contém três informações:
- Número predefinido (para qual posição ir)
- Tempo de espera (quanto tempo permanecerá lá, em segundos)
- Velocidade de movimento (a velocidade de deslocamento para essa predefinição - lenta, média ou rápida)
Aqui está um exemplo de uma configuração real de ronda de guarda:
| Etapa da turnê | Número predefinido | Tempo de permanência | Velocidade de movimento |
|---|---|---|---|
| 1 | Predefinição 1 (Portão principal) | 30 segundos | Alta |
| 2 | Predefinição 5 (Estacionamento) | 5 segundos | Médio |
| 3 | Predefinição 12 (Doca de carga) | 20 segundos | Alta |
| 4 | Predefinição 3 (Cerca de perímetro) | 10 segundos | Baixa |
| 5 | Predefinição 8 (Saída de emergência) | 15 segundos | Alta |
Por que diferentes tempos de permanência são importantes para o ROI
Os clientes de David Miller pagam pelos resultados do monitoramento, não pelas especificações da câmera. Se a câmera passa o mesmo tempo em uma parede em branco e na entrada principal, o sistema está desperdiçando metade do seu valor. Ao definir tempos de permanência mais longos em predefinições de alta prioridade, você obtém mais tempo de gravação nas áreas que importam. Isso reduz diretamente o número de câmeras necessárias para um projeto. Menos câmeras significa menor custo de hardware, menor custo de instalação e menor custo de manutenção.
O conceito de “prioridade predefinida
Alguns integradores perguntam: “Posso interromper uma ronda de vigilantes se um alarme for acionado?” Sim. A maioria das câmeras PTZ profissionais suporta chamadas predefinidas vinculadas a alarmes. Quando um alarme externo (como um sensor de movimento ou um evento de detecção de IA) é disparado, a câmera sai imediatamente da ronda de guarda, salta para a predefinição vinculada ao alarme, permanece lá por um tempo configurável e, em seguida, retoma a ronda. Isso é tratado no nível do firmware. O NVR ou o VMS envia um comando de predefinição vinculada a alarme e a câmera o prioriza em relação à etapa de ronda atual.
Uma armadilha comum com as câmeras PTZ chinesas
Algumas câmeras PTZ chinesas de baixo custo “roubam” números de predefinição para funções especiais. Por exemplo, a predefinição 65 pode acionar o início de uma turnê em vez de ir para uma posição. A predefinição 95 pode redefinir a câmera para os padrões de fábrica. Já vi integradores apagarem acidentalmente suas configurações ao chamar o número de predefinição errado em seu VMS. Sempre peça ao fabricante um tabela de mapeamento de funções de números predefinidos antes de fazer a integração. Na Loyalty-Secu, fornecemos essa tabela com cada remessa de produto. Nossas predefinições padrão variam de 1 a 255, sem funções ocultas, a menos que estejam explicitamente documentadas.
A lógica de back-end permite a “partida suave” e a “parada suave” para reduzir o desgaste mecânico?
Substituí câmeras PTZ que morreram depois de 8 meses porque os motores foram danificados por partidas instantâneas e paradas bruscas em cada chamada predefinida. O desgaste mecânico é um custo real, especialmente em locais remotos onde um caminhão custa mais do que a câmera.
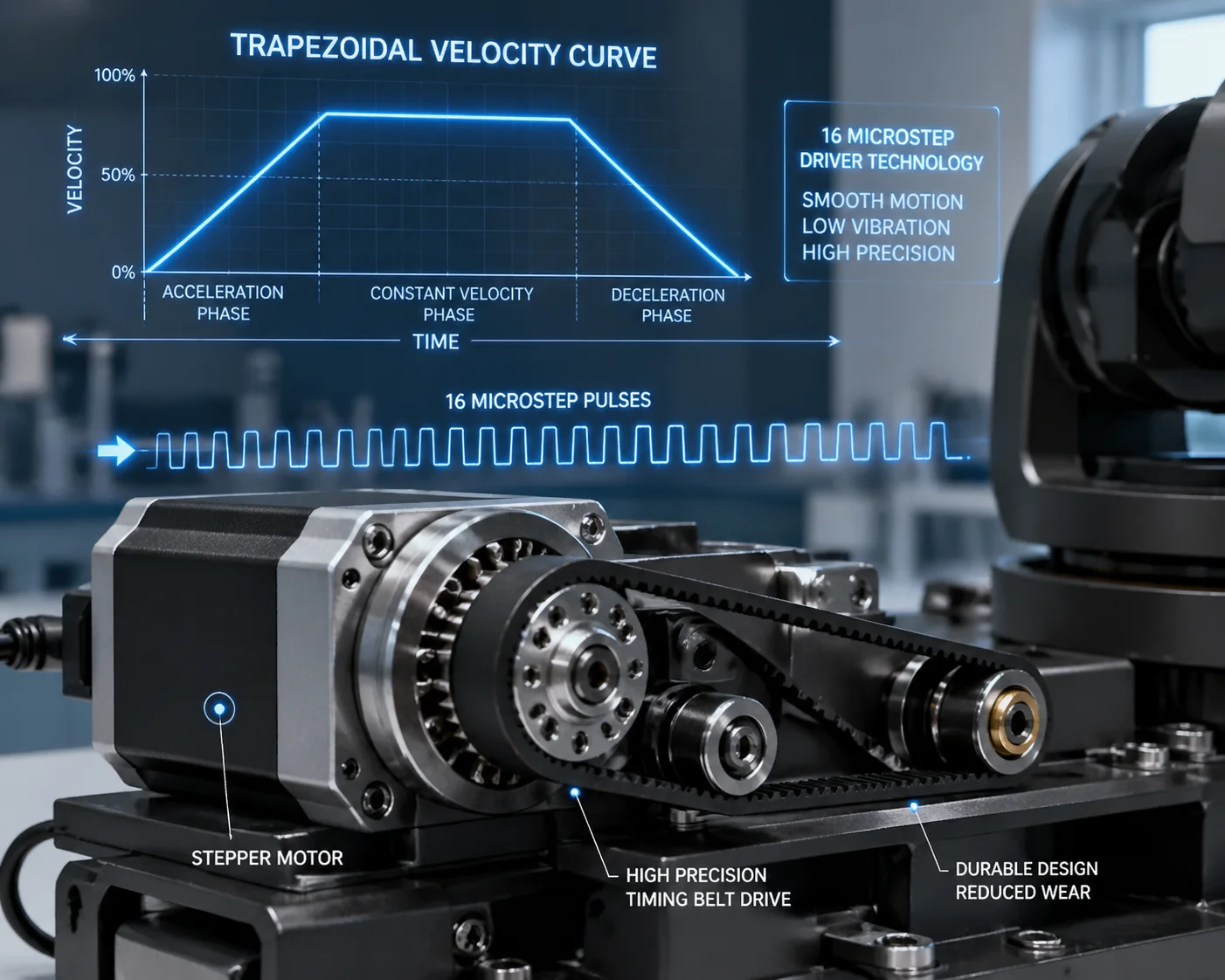
Sim. Nossas câmeras PTZ usam curvas de aceleração e desaceleração controladas por firmware (soft-start e soft-stop) em cada chamada predefinida. Os motores de passo aumentam gradualmente e diminuem antes de atingir a posição de destino. Isso reduz o desgaste da engrenagem, o estresse da correia e a vibração. Combinados com a tecnologia de driver de micropasso, os motores operam suavemente mesmo na velocidade máxima.
 Redução do desgaste do motor com partida suave e parada suave da câmera PTZ
Redução do desgaste do motor com partida suave e parada suave da câmera PTZ
O que “Soft-Start” e “Soft-Stop” realmente significam no nível do motor
Os movimentos de pan e tilt de uma câmera PTZ são acionados por motores de passo (ou, em alguns casos, servomotores CC com codificadores). Quando você chama uma predefinição, o motor precisa ir da velocidade zero à velocidade máxima, percorrer a distância necessária e parar exatamente na coordenada de destino.
Sem o soft-start/soft-stop, o motor recebe a tensão total instantaneamente. Ele entra em movimento, vibra e para no alvo. Isso gera três problemas:
- Tensão no dente da engrenagem. Partidas fortes colocam uma carga máxima sobre os dentes da engrenagem. Ao longo de milhares de ciclos, os dentes se desgastam ou racham.
- Deslizamento da correia. Se a câmera usar uma correia dentada (comum em projetos de dome PTZ), o torque repentino pode causar microdeslizamento. Com o tempo, isso leva a um desvio da predefinição.
- Vibração da imagem. Uma parada brusca faz com que o compartimento da câmera oscile por 0,5 a 1 segundo. A imagem treme. A qualidade da gravação cai.
Como nosso firmware lida com isso
Nosso firmware de controle de motor usa um perfil de velocidade trapezoidal:
- Fase de aceleração: O motor acelera de zero até a velocidade alvo em aproximadamente 0,1 a 0,2 segundos.
- Fase de cruzeiro: O motor funciona em velocidade máxima durante a maior parte da distância percorrida.
- Fase de redução de velocidade: O firmware calcula o ponto de desaceleração com base na distância restante. O motor diminui a velocidade gradualmente e para precisamente na contagem de pulsos desejada.
Não se trata de uma simples chave liga/desliga. O firmware calcula continuamente o ponto de desaceleração ideal com base na velocidade atual e na distância restante. Se a predefinição estiver muito próxima (digamos, 5 graus de distância), o motor pode nunca atingir a velocidade total - ele apenas faz um movimento suave e curto.
Drivers Microstep: A camada de precisão
Nossos motores de passo usam drivers microstep. Isso significa que cada etapa completa do motor é dividida em etapas menores. O resultado:
- Movimento mais suave. O motor se move em pequenos incrementos em vez de grandes saltos. Menos vibração, menos ruído.
- Maior precisão. Uma rotação panorâmica completa de 360 graus é dividida em dezenas de milhares de microposições. A precisão predefinida atinge ±0,1 graus.
- Ressonância mais baixa. O acionamento em etapas completas em determinadas velocidades causa ressonância (o motor vibra e perde o torque). O microstepping elimina esse problema.
A rede de segurança de calibração automática
Mesmo com partida suave/parada suave, a operação de longo prazo 24 horas por dia, 7 dias por semana, pode causar pequenos erros cumulativos. Uma correia se estica ligeiramente. Uma engrenagem se desgasta em uma fração de grau. Após 3 meses, a predefinição 1 não está mais centralizada no portão principal. O pior pesadelo de David Miller.
Nossa solução: calibração automática do ponto zero. Em cada inicialização (e, opcionalmente, a cada 24 horas), a câmera gira para encontrar seu ponto zero mecânico usando um interruptor de acoplador óptico. Isso redefine a referência de posição absoluta. Todas as 255 predefinições são então medidas a partir desse ponto zero confirmado. O desvio é eliminado antes de se tornar visível.
A chamada de uma predefinição acionará uma nova varredura de IA imediata da nova cena?
Essa é a questão que separa uma câmera PTZ moderna de uma antiga. Se a sua câmera for movida para uma nova predefinição e o mecanismo de IA levar 5 segundos para “acordar” e começar a detectar, você já perdeu o intruso.
Sim. Em nossos modelos PTZ equipados com IA, chamar uma predefinição aciona uma reinicialização imediata da cena. O mecanismo de IA começa a processar o novo campo de visão dentro de 300 a 500 ms após a câmera atingir a posição de destino. A detecção de pessoas e veículos é ativada antes que o primeiro segundo de tempo de espera completo tenha passado. Não há necessidade de rearmamento manual.
 Verificação de IA da câmera PTZ após detecção de cena de chamada predefinida
Verificação de IA da câmera PTZ após detecção de cena de chamada predefinida
Como o pipeline de IA responde a uma alteração predefinida
Quando uma câmera PTZ se move para uma nova predefinição, toda a cena visual muda. O mecanismo de detecção de IA precisa lidar com essa transição sem gerar alarmes falsos e sem perder alvos reais. Veja como nosso sistema gerencia isso:
Etapa 1: Detecção de mudança de cena
No momento em que a câmera começa a se mover, o mecanismo de IA reconhece que os quadros de vídeo estão em movimento. Ele suprime temporariamente a detecção para evitar alarmes falsos causados por desfoque de movimento e transição de cena. Essa supressão dura apenas durante a rotação física, normalmente menos de 1,5 segundo.
Etapa 2: Verificação da estabilização da cena
Quando a câmera atinge a predefinição de destino e os motores param, o firmware envia um sinal interno de “posição alcançada” para o módulo de processamento de IA. O mecanismo de IA aguarda de 1 a 2 quadros estáveis (aproximadamente 30 a 60 ms a 30 fps) para confirmar que a imagem não está mais se movendo.
Etapa 3: nova varredura imediata
O mecanismo de IA executa seu modelo de detecção no primeiro quadro estável. Em nossas câmeras com NPU (Unidade de Processamento Neural) dedicada 3 hardware, uma análise de um único quadro leva aproximadamente 30-50ms. A detecção humana, a detecção de veículos e as verificações de zonas de intrusão são executadas em paralelo.
| Estágio do pipeline de IA | Tempo necessário | Notas |
|---|---|---|
| Rotação do motor (180°) | ~1,2-1,5 segundos | Partida suave/parada suave incluídas |
| Estabilização da estrutura | ~30-60ms | Aguardando 1-2 quadros limpos |
| Primeira inferência de IA | ~30-50ms | Detecção acelerada por NPU |
| Tempo total até a primeira detecção | ~1,3-1,6 segundos | Da chamada predefinida para a IA ativa |
Por que isso é importante para combinações de ronda de guarda + IA
Se você executar uma ronda de guarda com 16 predefinições e tempos de permanência de 10 segundos, a câmera visitará cada predefinição por 10 segundos. Se a IA levar 5 segundos para começar a detectar em cada parada, você terá apenas 5 segundos de cobertura real da IA por predefinição. Isso representa uma perda de eficiência de 50%.
Com nosso sistema, a IA está ativa no primeiro segundo. Você obtém aproximadamente 9 de 10 segundos de cobertura total da IA em cada predefinição. Em um período de 24 horas, essa diferença resulta em horas adicionais de monitoramento eficaz.
A função das zonas de IA vinculadas a predefinições
Nossas câmeras também suportam zonas de detecção vinculadas a predefinições. Isso significa que você pode desenhar diferentes áreas de detecção de intrusão, linhas de fio de disparo e caixas de região de interesse para cada predefinição. Quando a câmera chega à Predefinição 5, ela carrega automaticamente as zonas de detecção que você configurou para a Predefinição 5. Quando passa para a Predefinição 12, ela carrega as zonas da Predefinição 12. Tudo isso é armazenado na memória local da câmera. O NVR não precisa enviar as configurações de zona a cada mudança de predefinição.
Esse recurso é essencial para integradores que implantam câmeras PTZ em ambientes complexos. Uma única câmera pode monitorar um portão (Predefinição 1, com um fio de disparo na entrada), um estacionamento (Predefinição 5, com uma região de interesse ao redor da faixa de veículos) e um telhado (Predefinição 12, com uma zona de intrusão ao longo da borda). Cada cena tem necessidades de detecção completamente diferentes. As zonas de IA vinculadas a predefinições lidam com isso automaticamente.
Conclusão
As 255 predefinições não são apenas um número em uma folha de especificações. Elas são respaldadas por controle motor de precisão, foco preditivo, calibração automática e firmware pronto para IA. Para os integradores que precisam de velocidade, precisão e desvio zero durante anos de operação 24 horas por dia, 7 dias por semana, a lógica de backend por trás de cada chamada de predefinição é o que separa uma implementação confiável de uma falha dispendiosa.
1. Arquitetura SoC (System-on-Chip) para pesquisa de predefinição de PTZ. ︎ 2. Protocolo Pelco-D RS-485 para controle de câmera PTZ. ︎ 3. Unidade de processamento neural (NPU) para inferência de IA de borda. ︎ 4. Armazenamento predefinido em memória não volátil para 255 posições. ︎ 5. Teste de vida acelerado para desgaste da engrenagem do motor PTZ. ︎ 6. Microstepping do motor de passo para um movimento PTZ suave. ︎ 7. Perfil de velocidade trapezoidal versus controle de motor de onda quadrada. ︎ 8. Calibração do ponto zero do acoplador óptico para desvio predefinido. ︎ 9. Padrões de metadados e gerenciamento de predefinições ONVIF. ︎ 10. Configuração da região de interesse (ROI) por predefinição do VMS. ︎