
He visto demasiadas cámaras PTZ que dicen tener 255 preajustes pero que se atascan después de los 10 primeros. Si estás construyendo sistemas de vigilancia a gran escala, necesitas saber qué ocurre realmente cuando pulsas “Ir a preajuste”.”
Una cámara PTZ bien diseñada completa una llamada de preajuste de 180 grados en menos de 1,5 segundos. El backend almacena los recuentos absolutos de impulsos del motor, la posición del zoom y los datos de enfoque de los 255 preajustes en una memoria no volátil. La latencia lógica desde la recepción del comando hasta la activación del motor es inferior a 50 ms. El verdadero cuello de botella de la velocidad es siempre el motor físico de giro e inclinación, no la búsqueda de preajustes.
 Velocidad de respuesta de los preajustes de la cámara PTZ y lógica de backend
Velocidad de respuesta de los preajustes de la cámara PTZ y lógica de backend
A continuación, desgloso las cuatro preguntas que más me plantean los integradores de sistemas como David Miller, que gestionan cientos de cámaras en distintos lugares de trabajo y no pueden permitirse que un solo preajuste se desvíe o se retrase. Entremos en detalles.
¿Cuántos milisegundos se tarda en llamar a una preselección situada a 180 grados?
Todos los integradores con los que trabajo se hacen esta pregunta en primer lugar. Una llamada preestablecida lenta significa eventos perdidos, tiempo de grabación malgastado y clientes finales enfadados. La velocidad no es opcional: es la base.
Llamar a una preselección a 180 grados tarda menos de 1,5 segundos en total. La latencia lógica -desde la recepción de la orden hasta el arranque del motor- es inferior a 50 ms. El resto del tiempo es rotación física. Nuestros motores de giro alcanzan entre 240°/s y 300°/s, y los de inclinación entre 160°/s y 200°/s. La cámara acelera, gira, desacelera y se fija en el objetivo en ese intervalo de 1,5 segundos.
 Velocidad de llamada preestablecida de la cámara PTZ Tiempo de rotación de 180 grados
Velocidad de llamada preestablecida de la cámara PTZ Tiempo de rotación de 180 grados
Desglose de las dos partes de la “velocidad de respuesta”
Cuando la gente dice “velocidad de respuesta”, suele mezclar dos cosas muy distintas. Permítanme separarlas claramente.
Parte 1: Latencia lógica. Este es el tiempo que transcurre entre que la cámara recibe su Preselección de llamada y el motor empieza a moverse. En nuestras cámaras PTZ industriales, el SoC 1 lee las coordenadas preestablecidas de la memoria flash y las convierte en señales de impulsos del motor. Esto lleva menos de 50 milisegundos. Tanto si llama a la preselección 1 como a la 255, el tiempo de búsqueda es el mismo. El número de preconfiguración no ralentiza el proceso. La estructura de datos es una tabla plana: se accede a cada entrada en tiempo constante.
Parte 2: Rotación física. Aquí es donde transcurre el tiempo real. La cámara tiene que hacer girar físicamente los motores de giro e inclinación desde el punto A al punto B. Esto es lo que determina el tiempo que tarda:
| Factor | Valor típico | Impacto en la velocidad |
|---|---|---|
| Velocidad máxima del motor | 240°/s - 300°/s | Mayor ángulo = más tiempo |
| Velocidad máxima del motor de inclinación | 160°/s - 200°/s | Los movimientos verticales son más lentos |
| Reposicionamiento del zoom | Depende de la distancia focal | Los lanzamientos largos del zoom añaden 0,3-0,5s |
| Readquisición de Focus | Simultáneo a la rotación | Sin retardo adicional si se utiliza el enfoque predictivo |
| Curva de aceleración/deceleración | Rampa suave integrada en el firmware | Añade ~0.2s a cada movimiento |
Por qué “menos de 1,5 segundos” es importante en implantaciones reales
Permítanme poner esto en contexto. Si ejecuta una ronda de vigilancia con 16 preajustes y cada llamada de preajuste desperdicia 4 segundos (como hacen muchas cámaras PTZ baratas), perderá más de un minuto por ciclo sólo en transiciones. Eso es un minuto de puntos ciegos. Con nuestras cámaras, el mismo recorrido de 16 preajustes pierde menos de 24 segundos en transiciones. Esa diferencia se acumula en un funcionamiento 24/7.
El factor oculto: Zoom y enfoque simultáneos
Muchas cámaras PTZ de gama baja mueven primero los motores de movimiento horizontal y vertical, luego ajustan el zoom y después buscan el enfoque. Esto añade 2-3 segundos de imágenes borrosas después de cada llamada preestablecida. Nuestra lógica de backend almacena los posición del motor de enfoque junto a cada preselección. Cuando la cámara empieza a girar, los motores de zoom y enfoque se mueven al mismo tiempo. El resultado: cuando la rotación se detiene, la imagen ya es nítida. Sin “caza de enfoque”. Sin segundos borrosos. Esto es lo que llamamos Snap Focus, y es un resultado directo de cómo el backend almacena y recupera los datos preestablecidos.
¿Y el retardo de la red?
Si utilizas ONVIF sobre IP, la red añade 1-50ms de latencia en una LAN local. Sobre una conexión 4G, espere 30-150ms. A través de RS-485 con Protocolo Pelco-D 2, el propio comando se transmite en microsegundos. En todos los casos, el retraso de la red es ínfimo comparado con el tiempo de rotación física. No es el cuello de botella.
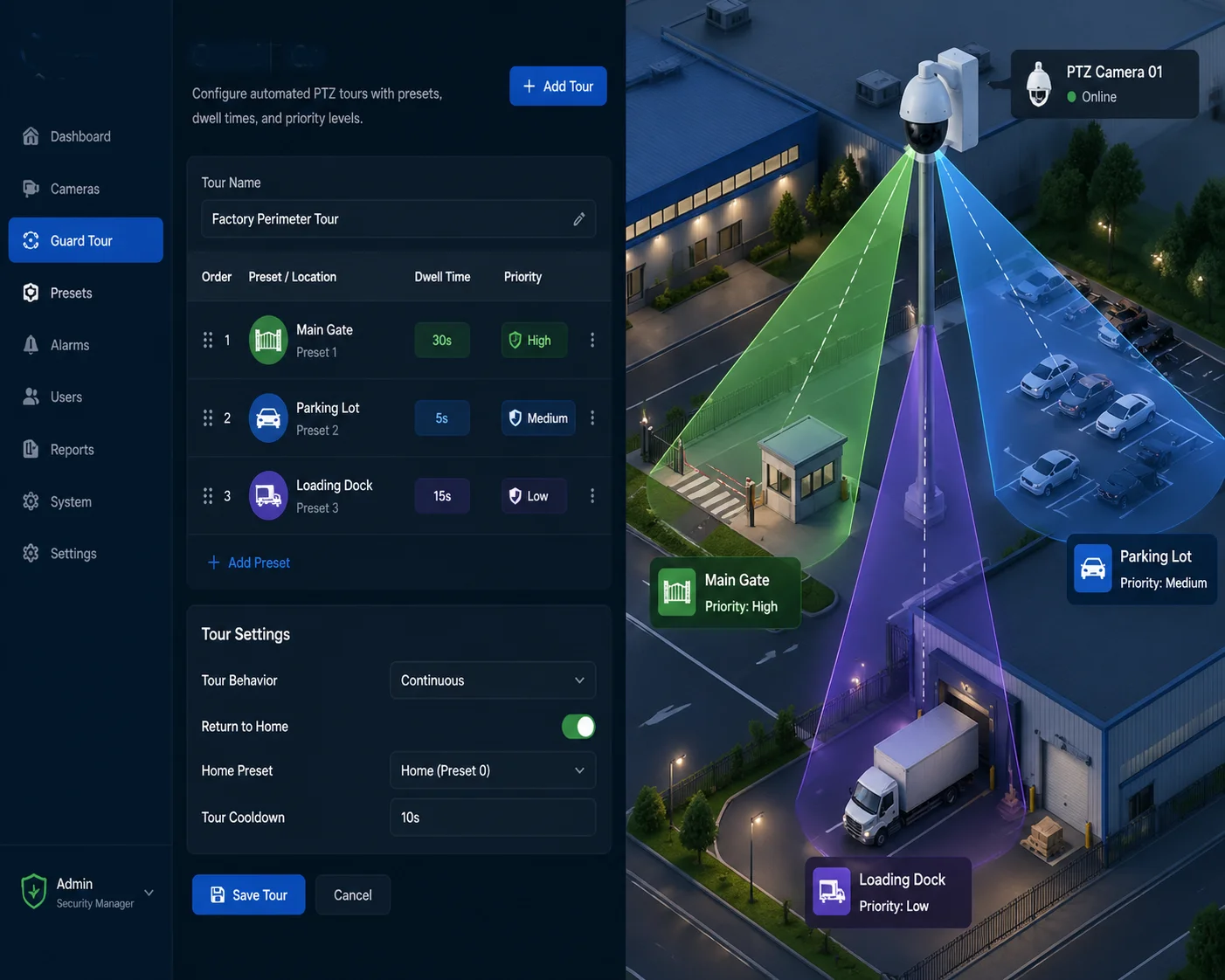
¿Puedo priorizar preselecciones específicas en un “Guard Tour” con diferentes tiempos de permanencia?
Esta pregunta me la hacen todos los integradores serios. Una ronda de vigilancia que trata cada preselección por igual es casi inútil. Es necesario mirar fijamente la puerta principal durante 30 segundos, pero sólo echar un vistazo al aparcamiento durante 5 segundos.
Sí. Nuestras cámaras PTZ admiten hasta 8 rondas de crucero independientes (rondas de vigilancia), cada una de las cuales contiene hasta 32 preajustes. Cada preajuste dentro de una ronda puede tener su propio tiempo de permanencia, su propia velocidad de movimiento y su propia prioridad de secuencia. Esto se configura a través de la interfaz web, el NVR o los comandos ONVIF.
 Configuración del tiempo de permanencia preestablecido de la ronda de vigilancia PTZ
Configuración del tiempo de permanencia preestablecido de la ronda de vigilancia PTZ
Cómo funcionan realmente los Guard Tours en el backend
Un circuito de vigilancia es un bucle simple almacenado en el firmware de la cámara. Cada entrada del bucle contiene tres datos:
- Número predefinido (a qué posición ir)
- Tiempo de permanencia (cuánto tiempo permanecer allí, en segundos)
- Velocidad de movimiento (la velocidad a la que se desplaza hasta ese preajuste: lenta, media o rápida)
He aquí un ejemplo de configuración real de una ronda de vigilancia:
| Tour Paso | Número predefinido | Tiempo de permanencia | Velocidad de movimiento |
|---|---|---|---|
| 1 | Preselección 1 (Puerta principal) | 30 segundos | Alta |
| 2 | Preajuste 5 (Aparcamiento) | 5 segundos | Medio |
| 3 | Preselección 12 (Muelle de carga) | 20 segundos | Alta |
| 4 | Preajuste 3 (Valla perimetral) | 10 segundos | Bajo |
| 5 | Preselección 8 (Salida de emergencia) | 15 segundos | Alta |
Por qué los tiempos de permanencia influyen en el retorno de la inversión
Los clientes de David Miller pagan por los resultados de la vigilancia, no por las especificaciones de las cámaras. Si la cámara pasa el mismo tiempo en una pared vacía y en la entrada principal, el sistema está desperdiciando la mitad de su valor. Al establecer tiempos de permanencia más largos en los preajustes de alta prioridad, se obtiene más tiempo de grabación en las áreas que importan. Esto reduce directamente el número de cámaras necesarias para un proyecto. Menos cámaras significa menos costes de hardware, de instalación y de mantenimiento.
El concepto de “prioridad preestablecida
Algunos integradores preguntan: “¿Puedo interrumpir una ronda de vigilancia si salta una alarma?”. Sí. La mayoría de las cámaras PTZ profesionales admiten llamadas preestablecidas vinculadas a la alarma. Cuando se dispara una alarma externa (como un sensor de movimiento o un evento de detección de IA), la cámara sale inmediatamente del recorrido de vigilancia, salta al preajuste vinculado a la alarma, permanece allí durante un tiempo configurable y, a continuación, reanuda el recorrido. Esto se gestiona a nivel de firmware. El NVR o VMS envía un comando de preajuste vinculado a alarma, y la cámara le da prioridad sobre el paso de ronda actual.
Una trampa común con las cámaras PTZ chinas
Algunas cámaras PTZ chinas económicas “roban” números de preselección para funciones especiales. Por ejemplo, el preajuste 65 podría activar un inicio de ronda en lugar de ir a una posición. El preajuste 95 podría restablecer la cámara a los valores predeterminados de fábrica. He visto a integradores borrar accidentalmente sus configuraciones llamando al número de preajuste equivocado desde su VMS. Pida siempre al fabricante un tabla de asignación de funciones antes de la integración. En Loyalty-Secu, proporcionamos esta tabla con cada envío de producto. Nuestros preajustes estándar van del 1 al 255 sin funciones ocultas a menos que estén explícitamente documentadas.
¿Permite la lógica de backend el “arranque suave” y la “parada suave” para reducir el desgaste mecánico?
He sustituido cámaras PTZ que murieron al cabo de 8 meses porque los motores estaban machacados por arranques instantáneos y paradas bruscas en cada llamada preestablecida. El desgaste mecánico es un coste real, sobre todo en lugares remotos donde un camión cuesta más que la cámara.
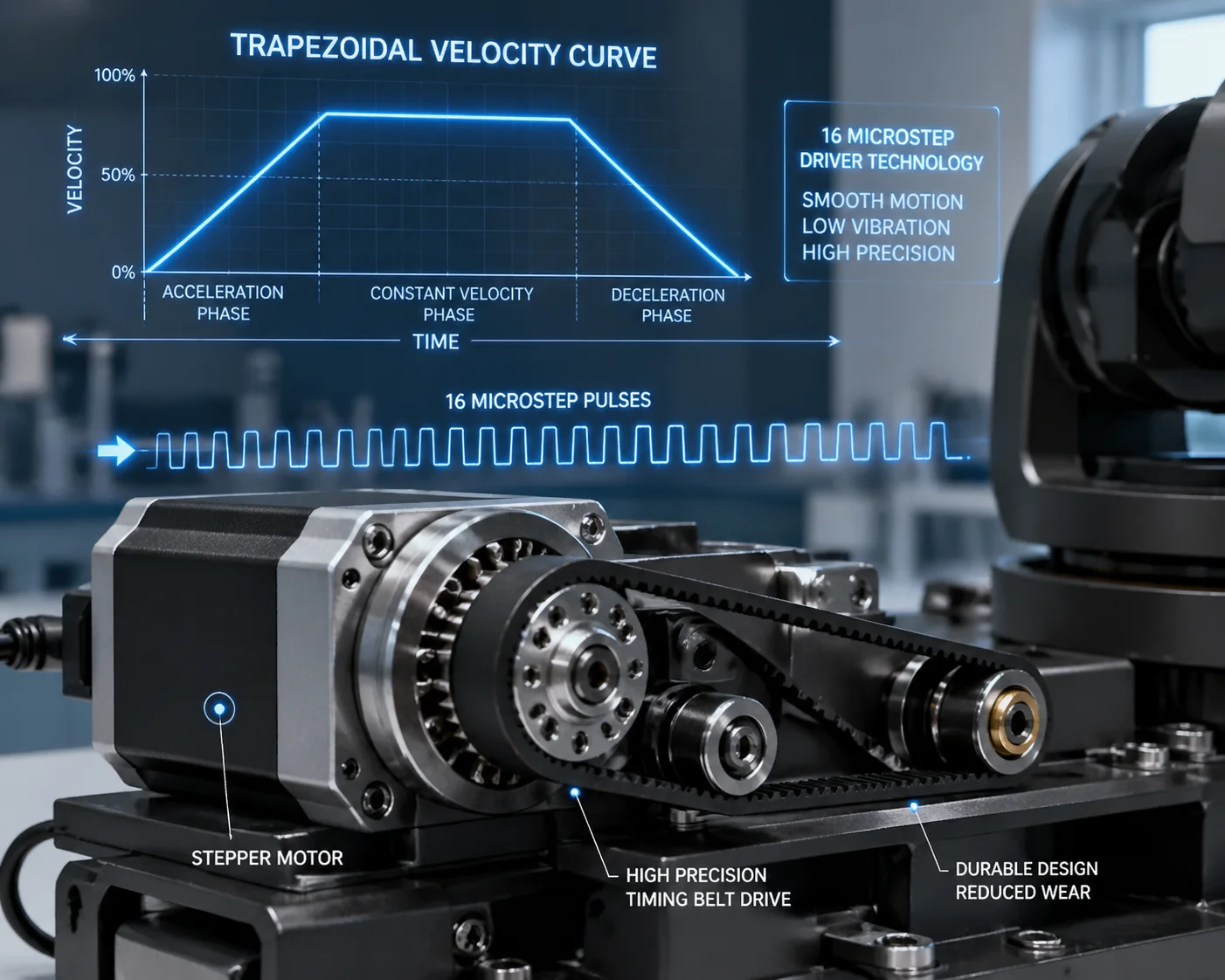
Sí. Nuestras cámaras PTZ utilizan curvas de aceleración y deceleración controladas por firmware (arranque y parada suaves) en cada llamada preestablecida. Los motores paso a paso suben y bajan gradualmente antes de alcanzar la posición objetivo. Esto reduce el desgaste de los engranajes, la tensión de las correas y las vibraciones. Combinados con la tecnología de controladores de micropasos, los motores funcionan con suavidad incluso a máxima velocidad.
 Arranque suave de la cámara PTZ Parada suave Reducción del desgaste del motor
Arranque suave de la cámara PTZ Parada suave Reducción del desgaste del motor
Qué significan realmente “arranque progresivo” y “parada progresiva” en el motor
Los movimientos de giro e inclinación de una cámara PTZ son accionados por motores paso a paso (o, en algunos casos, servomotores de CC con codificadores). Cuando se activa un preajuste, el motor debe pasar de velocidad cero a velocidad máxima, recorrer la distancia requerida y detenerse exactamente en la coordenada de destino.
Sin arranque/parada suaves, el motor recibe toda la tensión al instante. Se pone en movimiento bruscamente, vibra y se detiene de golpe en el objetivo. Esto crea tres problemas:
- Tensión del diente del engranaje. Los arranques bruscos suponen una carga máxima para los dientes del engranaje. Con miles de ciclos, los dientes se desgastan o se agrietan.
- Deslizamiento de la correa. Si la cámara utiliza una correa dentada (común en los diseños PTZ domo), un par repentino puede causar microdeslizamientos. Con el tiempo, esto conduce a la deriva de preajuste.
- Vibración de la imagen. Una parada brusca hace que la carcasa de la cámara oscile durante 0,5-1 segundo. La imagen tiembla. La calidad de la grabación disminuye.
Cómo lo gestiona nuestro firmware
Nuestro firmware de control del motor utiliza un perfil de velocidad trapezoidal:
- Fase de aceleración: El motor acelera desde cero hasta la velocidad objetivo en aproximadamente 0,1-0,2 segundos.
- Fase de crucero: El motor funciona a toda velocidad durante la mayor parte del recorrido.
- Fase de desaceleración: El firmware calcula el punto de deceleración en función de la distancia restante. El motor desacelera gradualmente y se detiene con precisión en el recuento de impulsos objetivo.
No se trata de un simple interruptor de encendido/apagado. El firmware calcula continuamente el punto óptimo de deceleración en función de la velocidad actual y la distancia restante. Si el punto preestablecido está muy cerca (por ejemplo, a 5 grados), es posible que el motor nunca alcance la velocidad máxima: sólo realiza un movimiento suave y corto.
Controladores de micropasos: La capa de precisión
Nuestros motores paso a paso utilizan controladores de micropasos. Esto significa que cada paso completo del motor se divide en pasos más pequeños. El resultado:
- Movimiento más suave. El motor se mueve en pequeños incrementos en lugar de grandes saltos. Menos vibraciones, menos ruido.
- Mayor precisión. Un giro completo de 360 grados se divide en decenas de miles de microposiciones. La precisión preestablecida alcanza ±0,1 grados.
- Baja la resonancia. El paso completo a ciertas velocidades provoca resonancia (el motor vibra y pierde par). El micropaso elimina este problema.
La red de seguridad de la calibración automática
Incluso con arranque y parada suaves, el funcionamiento ininterrumpido a largo plazo puede provocar pequeños errores acumulativos. Una correa se estira ligeramente. Un engranaje se desgasta una fracción de grado. Después de 3 meses, el preajuste 1 ya no está centrado en la puerta principal. La peor pesadilla de David Miller.
Nuestra solución: calibración automática del punto cero. En cada encendido (y opcionalmente cada 24 horas), la cámara gira para encontrar su punto cero mecánico utilizando un interruptor de acoplador óptico. Esto restablece la referencia de posición absoluta. Los 255 preajustes se miden a partir de este punto cero confirmado. La deriva se elimina antes de que sea visible.
¿La activación de un preajuste provocará una nueva exploración inmediata de la IA de la nueva escena?
Esta es la cuestión que diferencia a una cámara PTZ moderna de una antigua. Si tu cámara se mueve a un nuevo preajuste y el motor de IA tarda 5 segundos en “despertarse” y empezar a detectar, ya has pasado por alto al intruso.
Sí. En nuestros modelos PTZ equipados con IA, la llamada a un preajuste desencadena una reinicialización inmediata de la escena. El motor de IA comienza a procesar el nuevo campo de visión entre 300 y 500 ms después de que la cámara alcance su posición de destino. La detección de personas y vehículos se activa antes de que transcurra el primer segundo de tiempo de espera completo. No se requiere rearme manual.
 Reescaneado AI de cámara PTZ tras detección de escena de llamada preestablecida
Reescaneado AI de cámara PTZ tras detección de escena de llamada preestablecida
Cómo responde la AI Pipeline a un cambio de preajuste
Cuando una cámara PTZ se desplaza a un nuevo preajuste, toda la escena visual cambia. El motor de detección de IA debe gestionar esta transición sin generar falsas alarmas y sin pasar por alto objetivos reales. He aquí cómo lo gestiona nuestro sistema:
Paso 1: Detección de cambios en la escena
En el momento en que la cámara empieza a moverse, el motor de IA reconoce que los fotogramas de vídeo están en movimiento. Suprime temporalmente la detección para evitar falsas alarmas causadas por el desenfoque de movimiento y la transición de escenas. Esta supresión solo dura durante la rotación física, normalmente menos de 1,5 segundos.
Paso 2: Comprobación de la estabilización de la escena
Una vez que la cámara alcanza el objetivo preestablecido y los motores se detienen, el firmware envía una señal interna de “posición alcanzada” al módulo de procesamiento de IA. El motor de IA espera 1-2 fotogramas estables (aproximadamente 30-60 ms a 30 fps) para confirmar que la imagen ya no se mueve.
Paso 3: Reexploración inmediata
El motor de IA ejecuta su modelo de detección en el primer fotograma estable. En nuestras cámaras con NPU (unidad de procesamiento neuronal) dedicada. 3 hardware, el análisis de un fotograma tarda aproximadamente 30-50ms. La detección de personas, la detección de vehículos y las comprobaciones de zonas de intrusión se ejecutan en paralelo.
| AI Pipeline Stage | Tiempo necesario | Notas |
|---|---|---|
| Rotación del motor (180°) | ~1,2-1,5 segundos | Arranque y parada suaves incluidos |
| Estabilización del cuadro | ~30-60ms | A la espera de 1-2 cuadros limpios |
| Primera inferencia de IA | ~30-50ms | Detección acelerada por NPU |
| Tiempo total hasta la primera detección | ~1,3-1,6 segundos | De llamada preestablecida a IA activa |
Por qué es importante para las combinaciones de ronda de vigilancia + IA
Si ejecuta una ronda de vigilancia con 16 preajustes y tiempos de permanencia de 10 segundos, la cámara visita cada preajuste durante 10 segundos. Si la IA tarda 5 segundos en empezar a detectar en cada parada, sólo obtendrá 5 segundos de cobertura real de la IA por preselección. Esto supone una pérdida de eficiencia de 50%.
Con nuestro sistema, la IA se activa en el primer segundo. Obtendrá aproximadamente 9 de cada 10 segundos de cobertura total de IA en cada preselección. En un periodo de 24 horas, esta diferencia se traduce en horas de vigilancia eficaz adicional.
El papel de las zonas AI preestablecidas
Nuestras cámaras también admiten zonas de detección preestablecidas. Esto significa que puede dibujar diferentes zonas de detección de intrusión, líneas de cable trampa y cuadros de región de interés para cada preajuste. Cuando la cámara llega al preajuste 5, carga automáticamente las zonas de detección que configuró para el preajuste 5. Cuando se mueve al preajuste 12, carga las zonas para el preajuste 12. Todo esto se almacena en la memoria local de la cámara. El NVR no necesita introducir las configuraciones de zona en cada cambio de preajuste.
Esta función es fundamental para los integradores que instalan cámaras PTZ en entornos complejos. Una sola cámara puede vigilar una puerta (preajuste 1, con un cable trampa a lo largo de la entrada), un aparcamiento (preajuste 5, con una región de interés alrededor del carril de vehículos) y un tejado (preajuste 12, con una zona de intrusión a lo largo del borde). Cada escena tiene necesidades de detección completamente diferentes. Las zonas AI vinculadas a preajustes se encargan de ello automáticamente.
Conclusión
Los 255 preajustes no son sólo un número en una hoja de especificaciones. Están respaldadas por un control motorizado de precisión, enfoque predictivo, autocalibración y firmware preparado para IA. Para los integradores que necesitan velocidad, precisión y cero desviaciones durante años de funcionamiento ininterrumpido, la lógica que subyace a cada preajuste es lo que diferencia una instalación fiable de un costoso fallo.
1. Arquitectura de sistema en chip (SoC) para la búsqueda de preajustes PTZ. ︎ 2. Protocolo Pelco-D RS-485 para el control de cámaras PTZ. ︎ 3. Unidad de procesamiento neuronal (NPU) para la inferencia de inteligencia artificial en los bordes. ︎ 4. Memoria no volátil para 255 posiciones. ︎ 5. Pruebas de vida útil acelerada para el desgaste del engranaje del motor PTZ. ︎ 6. Motor paso a paso microstepping para un movimiento PTZ suave. ︎ 7. Perfil de velocidad trapezoidal frente a control de motor de onda cuadrada. ︎ 8. Calibración del punto cero del acoplador óptico para la deriva preestablecida. ︎ 9. Gestión de preajustes y normas de metadatos ONVIF. ︎ 10. Configuración de la región de interés (ROI) por preselección VMS. ︎