
Ich habe schon zu viele PTZ-Kameras gesehen, die 255 Voreinstellungen angeben, aber nach den ersten 10 nicht mehr funktionieren. Wenn Sie große Überwachungssysteme aufbauen, müssen Sie wissen, was tatsächlich passiert, wenn Sie “Go to Preset” drücken.”
Eine ausgereifte PTZ-Kamera führt einen 180-Grad-Voreinstellungsaufruf in weniger als 1,5 Sekunden aus. Das Backend speichert die absoluten Motorimpulszahlen, die Zoomposition und die Fokusdaten für alle 255 Voreinstellungen im nichtflüchtigen Speicher. Die logische Latenzzeit vom Befehlseingang bis zur Motoraktivierung liegt unter 50 ms. Der eigentliche Geschwindigkeitsengpass ist immer der physische Schwenk- und Neigemotor, nicht die Voreinstellungssuche.
 PTZ-Kamera-Voreinstellung, Reaktionsgeschwindigkeit und Backend-Logik
PTZ-Kamera-Voreinstellung, Reaktionsgeschwindigkeit und Backend-Logik
Im Folgenden gehe ich auf die vier Fragen ein, die ich am häufigsten von Systemintegratoren wie David Miller höre - von Leuten, die Hunderte von Kameras an verschiedenen Standorten betreiben und sich nicht leisten können, dass eine einzige Voreinstellung abweicht oder verzögert. Lassen Sie uns ins Detail gehen.
Wie viele Millisekunden dauert es, eine Voreinstellung aufzurufen, die sich 180 Grad entfernt befindet?
Jeder Integrator, mit dem ich zusammenarbeite, stellt sich diese Frage zuerst. Ein langsamer voreingestellter Anruf bedeutet verpasste Ereignisse, verschwendete Aufnahmezeit und verärgerte Endkunden. Geschwindigkeit ist nicht optional - sie ist die Basis.
Das Aufrufen eines um 180 Grad entfernten Presets dauert insgesamt weniger als 1,5 Sekunden. Die logische Latenzzeit - vom Befehlseingang bis zum Motorstart - liegt unter 50 ms. Der Rest der Zeit ist physische Rotation. Unsere Schwenkmotoren erreichen 240°/s bis 300°/s, und die Neigemotoren erreichen 160°/s bis 200°/s. Innerhalb dieses 1,5-Sekunden-Fensters wird die Kamera beschleunigt, gedreht, abgebremst und auf das Ziel ausgerichtet.
 PTZ-Kamera voreingestellte Rufgeschwindigkeit 180 Grad Drehzeit
PTZ-Kamera voreingestellte Rufgeschwindigkeit 180 Grad Drehzeit
Aufschlüsselung der beiden Teile von “Reaktionsgeschwindigkeit”
Wenn Menschen von “Reaktionsgeschwindigkeit” sprechen, verwechseln sie meist zwei sehr unterschiedliche Dinge. Ich möchte sie klar trennen.
Teil 1: Logische Latenzzeit. Dies ist die Zeitspanne, die zwischen dem Empfang Ihrer Daten durch die Kamera Voreinstellung aufrufen Befehl und dem tatsächlichen Anlaufen des Motors. Bei unseren industriellen PTZ-Kameras ist die Haupt SoC 1 liest die voreingestellten Koordinaten aus dem Flash-Speicher und wandelt sie in Motorimpulssignale um. Dies dauert weniger als 50 Millisekunden. Ob Sie Preset 1 oder Preset 255 aufrufen, die Suchzeit ist dieselbe. Die Voreinstellungsnummer verlangsamt die Dinge nicht. Die Datenstruktur ist eine flache Tabelle - auf jeden Eintrag wird in konstanter Zeit zugegriffen.
Teil 2: Physikalische Rotation. Das ist der eigentliche Zeitaufwand. Die Kamera muss die Schwenk- und Neigemotoren physisch von Punkt A nach Punkt B drehen:
| Faktor | Typischer Wert | Auswirkungen auf die Geschwindigkeit |
|---|---|---|
| Maximale Geschwindigkeit des Pan-Motors | 240°/s - 300°/s | Größerer Winkel = mehr Zeit |
| Höchstgeschwindigkeit des Kippmotors | 160°/s - 200°/s | Vertikale Bewegungen sind langsamer |
| Zoom-Neupositionierung | Abhängig von der Brennweitenlücke | Lange Zoom-Würfe fügen 0,3-0,5s hinzu |
| Fokus Neuakquisition | Zeitgleich mit der Rotation | Keine zusätzliche Verzögerung, wenn der prädiktive Fokus verwendet wird |
| Beschleunigungs-/Abbremskurve | In der Firmware integrierte Softrampe | Verlängert jeden Zug um ~0,2s |
Warum “unter 1,5 Sekunden” in echten Einsätzen wichtig ist
Lassen Sie mich das in den Kontext stellen. Wenn Sie einen Wachrundgang mit 16 Voreinstellungen durchführen und jeder Voreinstellungsaufruf 4 Sekunden vergeudet (wie es bei vielen billigen PTZ-Kameras der Fall ist), verlieren Sie pro Zyklus über eine Minute nur für Übergänge. Das ist eine Minute mit blinden Flecken. Mit unseren Kameras verliert dieselbe Tour mit 16 Voreinstellungen weniger als 24 Sekunden für Übergänge. Dieser Unterschied summiert sich bei einem 24/7-Betrieb.
Der verborgene Faktor: Gleichzeitiges Zoomen und Fokussieren
Viele PTZ-Kameras der unteren Preisklasse bewegen zuerst die Schwenk-/Neigemotoren, stellen dann den Zoom ein und suchen dann den Fokus. Das führt zu 2-3 Sekunden unscharfem Bildmaterial nach jedem Aufruf der Voreinstellung. Unsere Backend-Logik speichert die Position des Fokusmotors neben jeder Voreinstellung. Wenn die Kamera zu rotieren beginnt, bewegen sich die Motoren für Zoom und Fokus gleichzeitig. Das Ergebnis: Wenn die Drehung stoppt, ist das Bild bereits scharf. Kein “Schärfejagen”. Keine verschwommenen Sekunden. Das nennen wir Schnappschuss, und ist eine direkte Folge davon, wie das Backend voreingestellte Daten speichert und abruft.
Was ist mit der Netzverzögerung?
Wenn Sie ONVIF über IP verwenden, fügt das Netzwerk eine Latenzzeit von 1-50 ms in einem lokalen LAN hinzu. Bei einer 4G-Verbindung sind 30-150 ms zu erwarten. Über RS-485 mit Pelco-D-Protokoll 2, Der Befehl selbst wird in Mikrosekunden übertragen. In allen Fällen ist die Netzverzögerung im Vergleich zur physikalischen Rotationszeit winzig. Sie ist nicht der Engpass.
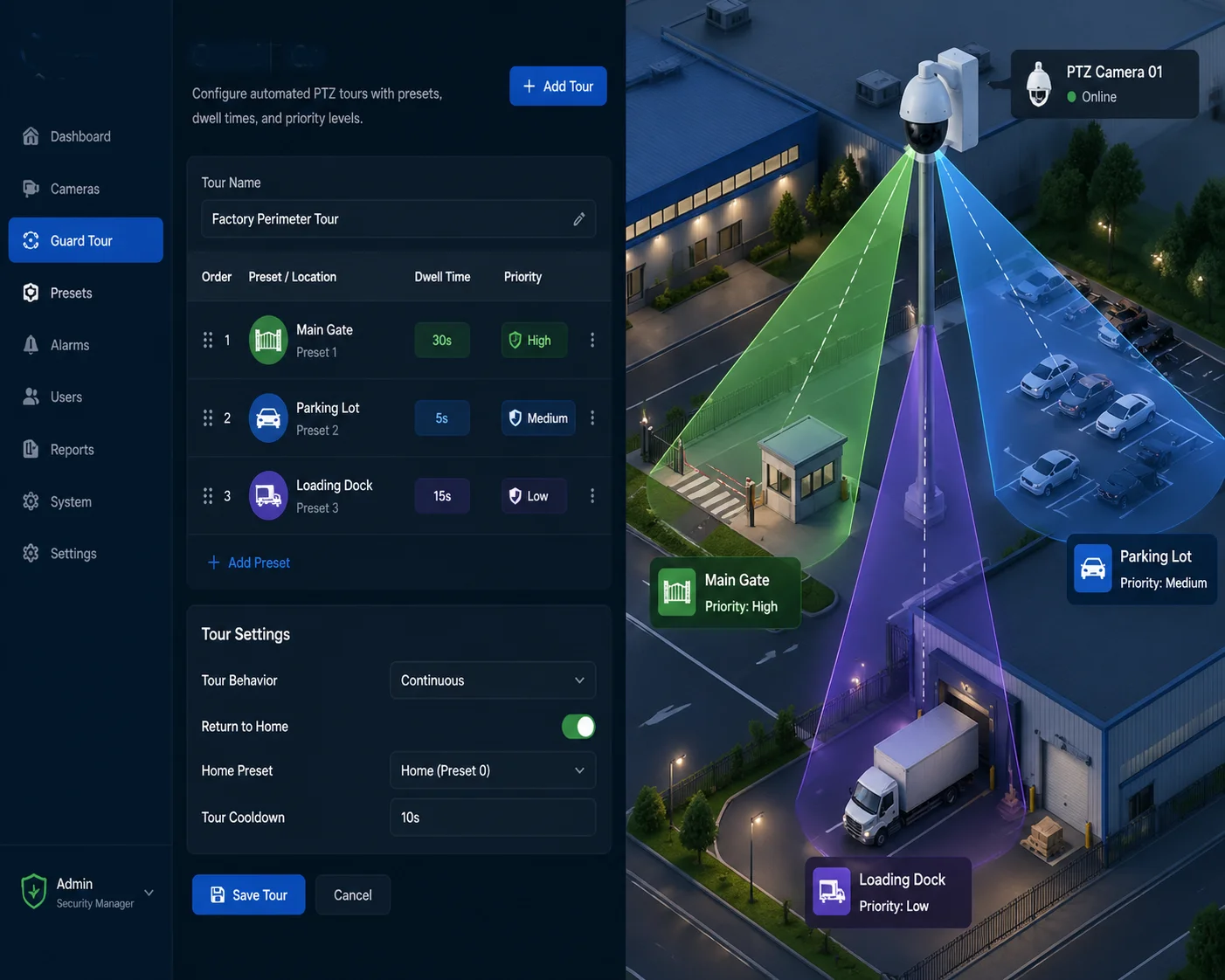
Kann ich bestimmten Voreinstellungen in einer “Guard Tour” mit unterschiedlichen Verweilzeiten Priorität einräumen?
Diese Frage wird mir von jedem ernsthaften Integrator gestellt. Ein Wachrundgang, bei dem jede Voreinstellung gleich behandelt wird, ist nahezu nutzlos. Sie müssen 30 Sekunden lang auf das Haupttor starren, aber nur 5 Sekunden lang einen Blick auf den Parkplatz werfen.
Ja. Unsere PTZ-Kameras unterstützen bis zu 8 unabhängige Rundgänge (Wächterrundgänge), die jeweils bis zu 32 Voreinstellungen enthalten. Jede Voreinstellung innerhalb einer Tour kann ihre eigene Verweilzeit, ihre eigene Bewegungsgeschwindigkeit und ihre eigene Sequenzpriorität haben. Die Konfiguration erfolgt über die Weboberfläche, den NVR oder über ONVIF-Befehle.
 PTZ-Wächterrundgang Konfiguration der voreingestellten Verweilzeit
PTZ-Wächterrundgang Konfiguration der voreingestellten Verweilzeit
Wie Guard Tours im Backend tatsächlich funktionieren
Ein Wachrundgang ist eine einfache Schleife, die in der Firmware der Kamera gespeichert ist. Jeder Eintrag in der Schleife enthält drei Informationen:
- Voreingestellte Nummer (welche Position ist anzusteuern)
- Verweilzeit (wie lange man sich dort aufhält, in Sekunden)
- Geschwindigkeit der Bewegung (wie schnell diese Voreinstellung erreicht werden soll - langsam, mittel oder schnell)
Hier ist ein Beispiel für eine echte Wächterrundgangskonfiguration:
| Tour Schritt | Voreingestellte Nummer | Verweilzeit | Geschwindigkeit der Bewegung |
|---|---|---|---|
| 1 | Voreinstellung 1 (Haupttor) | 30 Sekunden | Hoch |
| 2 | Voreinstellung 5 (Parkplatz) | 5 Sekunden | Mittel |
| 3 | Voreinstellung 12 (Laderampe) | 20 Sekunden | Hoch |
| 4 | Voreinstellung 3 (Begrenzungszaun) | 10 Sekunden | Niedrig |
| 5 | Voreinstellung 8 (Notausstieg) | 15 Sekunden | Hoch |
Warum unterschiedliche Verweilzeiten für den ROI wichtig sind
David Millers Kunden zahlen für die Überwachungsergebnisse, nicht für die Kameraspezifikationen. Wenn die Kamera gleich viel Zeit auf eine leere Wand und den Haupteingang verwendet, verschwendet das System die Hälfte seines Wertes. Durch die Einstellung längerer Verweilzeiten für Voreinstellungen mit hoher Priorität erhalten Sie mehr Aufnahmezeit für die Bereiche, die wichtig sind. Dadurch wird die Anzahl der für ein Projekt benötigten Kameras direkt reduziert. Weniger Kameras bedeuten geringere Hardwarekosten, geringere Installationskosten und geringere Wartungskosten.
Das Konzept der “voreingestellten Priorität”
Manche Integratoren fragen: “Kann ich einen Wachrundgang unterbrechen, wenn ein Alarm ausgelöst wird?” Ja. Die meisten professionellen PTZ-Kameras unterstützen alarmgesteuerte voreingestellte Anrufe. Wenn ein externer Alarm (z. B. ein Bewegungssensor oder ein AI-Erkennungsereignis) ausgelöst wird, verlässt die Kamera sofort den Wachrundgang, springt zu der mit dem Alarm verknüpften Voreinstellung, bleibt dort für eine konfigurierbare Zeit und setzt dann den Rundgang fort. Dieser Vorgang wird auf Firmware-Ebene durchgeführt. Der NVR oder das VMS sendet einen alarmverknüpften Voreinstellungsbefehl, und die Kamera priorisiert diesen vor dem aktuellen Rundgang.
Eine häufige Falle bei chinesischen PTZ-Kameras
Einige preiswerte chinesische PTZ-Kameras “stehlen” Voreinstellungsnummern für spezielle Funktionen. So kann z. B. die Voreinstellung 65 einen Tourstart auslösen, anstatt eine Position anzufahren. Die Voreinstellung 95 kann die Kamera auf die Werkseinstellungen zurücksetzen. Ich habe schon erlebt, dass Integratoren ihre Konfigurationen versehentlich gelöscht haben, indem sie die falsche Voreinstellungsnummer über ihr VMS aufgerufen haben. Fragen Sie immer den Hersteller nach einer Preset-Nummern-Funktionszuordnungstabelle bevor Sie integrieren. Bei Loyalty-Secu liefern wir diese Tabelle mit jeder Produktlieferung. Unsere Standardvoreinstellungen reichen von 1-255 und enthalten keine versteckten Funktionen, es sei denn, sie sind ausdrücklich dokumentiert.
Erlaubt die Backend-Logik “Soft-Start” und “Soft-Stop”, um den mechanischen Verschleiß zu reduzieren?
Ich habe schon PTZ-Kameras ersetzt, die nach 8 Monaten den Geist aufgegeben haben, weil die Motoren bei jedem voreingestellten Aufruf durch sofortiges Starten und hartes Anhalten beschädigt wurden. Mechanischer Verschleiß ist ein echter Kostenfaktor - vor allem an abgelegenen Standorten, wo eine LKW-Rolle mehr kostet als die Kamera.
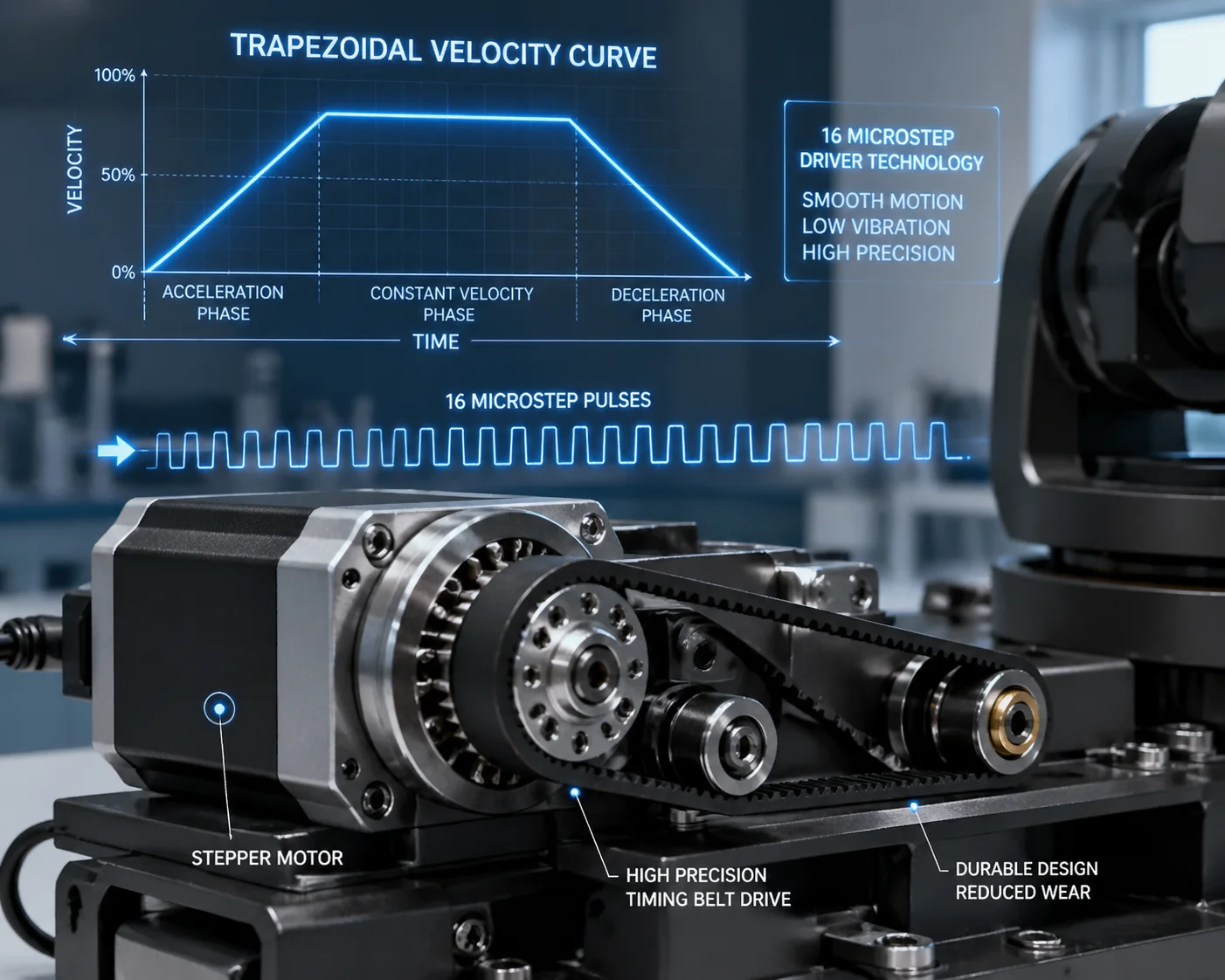
Ja. Unsere PTZ-Kameras verwenden firmwaregesteuerte Beschleunigungs- und Verzögerungskurven (Soft-Start und Soft-Stop) bei jedem voreingestellten Aufruf. Die Schrittmotoren fahren allmählich hoch und herunter, bevor sie die Zielposition erreichen. Dadurch werden Getriebeverschleiß, Riemenbelastung und Vibrationen reduziert. In Kombination mit der Mikroschritt-Treibertechnologie arbeiten die Motoren auch bei maximaler Geschwindigkeit reibungslos.
 PTZ-Kamera Soft-Start Soft-Stop Motorverschleißreduzierung
PTZ-Kamera Soft-Start Soft-Stop Motorverschleißreduzierung
Was “Soft-Start” und “Soft-Stop” auf Motorebene tatsächlich bedeuten
Die Schwenk- und Neigebewegungen einer PTZ-Kamera werden von Schrittmotoren (oder in einigen Fällen von DC-Servomotoren mit Encodern) angetrieben. Wenn Sie eine Voreinstellung aufrufen, muss der Motor von Null auf volle Geschwindigkeit gehen, die erforderliche Strecke zurücklegen und dann genau an der Zielkoordinate anhalten.
Ohne Soft-Start/Soft-Stop erhält der Motor sofort die volle Spannung. Er setzt sich ruckartig in Bewegung, vibriert und kommt am Ziel zum Stehen. Dies führt zu drei Problemen:
- Belastung der Zahnräder. Harte Starts belasten die Verzahnung am stärksten. Nach Tausenden von Zyklen nutzen sich die Zähne ab oder brechen.
- Riemenschlupf. Wenn die Kamera einen Zahnriemen verwendet (häufig bei Dome-PTZ-Konstruktionen), kann ein plötzliches Drehmoment einen Mikroschlupf verursachen. Mit der Zeit führt dies zu einer Drift der Voreinstellung.
- Bildvibrationen. Ein harter Anschlag bewirkt, dass das Kameragehäuse 0,5-1 Sekunde lang schwankt. Das Bild verwackelt. Die Aufnahmequalität nimmt ab.
Wie unsere Firmware damit umgeht
Unsere Motorsteuerungs-Firmware verwendet eine trapezförmiges Geschwindigkeitsprofil:
- Hochlaufphase: Der Motor beschleunigt von Null auf die Zielgeschwindigkeit in etwa 0,1-0,2 Sekunden.
- Kreuzfahrtphase: Der Motor läuft während des größten Teils der Fahrtstrecke mit voller Geschwindigkeit.
- Ramp-down-Phase: Die Firmware berechnet den Verzögerungspunkt anhand der verbleibenden Strecke. Der Motor wird allmählich langsamer und hält genau bei der Zielimpulszahl an.
Dabei handelt es sich nicht um einen einfachen Ein/Aus-Schalter. Die Firmware berechnet kontinuierlich den optimalen Verzögerungspunkt auf der Grundlage der aktuellen Geschwindigkeit und der verbleibenden Entfernung. Wenn der voreingestellte Punkt sehr nah ist (z. B. 5 Grad entfernt), erreicht der Motor möglicherweise nie die volle Geschwindigkeit - er macht nur eine sanfte, kurze Bewegung.
Microstep-Treiber: Die Präzisionsschicht
Unsere Schrittmotoren verwenden Mikroschritt-Treiber. Das bedeutet, dass jeder Vollschritt des Motors in kleinere Schritte unterteilt wird. Das Ergebnis:
- Sanftere Bewegung. Der Motor bewegt sich in kleinen Schritten statt in großen Sprüngen. Weniger Vibration, weniger Lärm.
- Höhere Präzision. Eine volle 360-Grad-Schwenkbewegung ist in Zehntausende von Mikropositionen unterteilt. Die voreingestellte Genauigkeit erreicht ±0,1 Grad.
- Niedrigere Resonanz. Vollschrittbetrieb bei bestimmten Drehzahlen führt zu Resonanz (der Motor vibriert und verliert an Drehmoment). Das Mikroschrittverfahren beseitigt dieses Problem.
Das Sicherheitsnetz der Auto-Kalibrierung
Selbst bei Soft-Start/Soft-Stopp kann ein langfristiger 24/7-Betrieb zu kleinen kumulativen Fehlern führen. Ein Riemen dehnt sich leicht. Ein Zahnrad nutzt sich um einen Bruchteil eines Grades ab. Nach 3 Monaten ist die Voreinstellung 1 nicht mehr auf das Haupttor zentriert. Der schlimmste Albtraum von David Miller.
Unsere Lösung: automatische Nullpunkt-Kalibrierung. Bei jedem Einschalten (und optional alle 24 Stunden) dreht sich die Kamera, um ihren mechanischen Nullpunkt mit Hilfe eines Optokopplerschalters zu finden. Dadurch wird die absolute Positionsreferenz zurückgesetzt. Alle 255 Voreinstellungen werden dann von diesem bestätigten Nullpunkt aus gemessen. Die Drift wird eliminiert, bevor sie sichtbar wird.
Löst das Aufrufen einer Voreinstellung einen sofortigen AI Re-Scan der neuen Szene aus?
Dies ist die Frage, die eine moderne PTZ-Kamera von einer älteren unterscheidet. Wenn sich Ihre Kamera zu einer neuen Voreinstellung bewegt und die KI-Engine 5 Sekunden braucht, um “aufzuwachen” und mit der Erkennung zu beginnen, haben Sie den Eindringling bereits verpasst.
Ja. Bei unseren mit AI ausgestatteten PTZ-Modellen löst der Aufruf einer Voreinstellung eine sofortige Neuinitialisierung der Szene aus. Die KI-Engine beginnt mit der Verarbeitung des neuen Sichtfelds innerhalb von 300-500 ms, nachdem die Kamera ihre Zielposition erreicht hat. Die Erkennung von Personen und Fahrzeugen ist bereits vor Ablauf der ersten vollen Verweildauer-Sekunde aktiv. Es ist keine manuelle Nachrüstung erforderlich.
 KI-Neuscan der PTZ-Kamera nach voreingestellter Rufszenenerkennung
KI-Neuscan der PTZ-Kamera nach voreingestellter Rufszenenerkennung
Wie die AI Pipeline auf eine Voreinstellungsänderung reagiert
Wenn eine PTZ-Kamera zu einer neuen Voreinstellung wechselt, ändert sich die gesamte visuelle Szene. Die KI-Erkennungsmaschine muss diesen Übergang bewältigen, ohne Fehlalarme auszulösen und ohne echte Ziele zu übersehen. Hier sehen Sie, wie unser System dies bewerkstelligt:
Schritt 1: Erkennung von Szenenänderungen
In dem Moment, in dem sich die Kamera zu bewegen beginnt, erkennt die KI-Engine, dass die Videobilder in Bewegung sind. Sie unterdrückt die Erkennung vorübergehend, um Fehlalarme aufgrund von Bewegungsunschärfe und Szenenübergängen zu vermeiden. Diese Unterdrückung dauert nur während der physischen Drehung - normalerweise weniger als 1,5 Sekunden.
Schritt 2: Überprüfung der Stabilisierung der Szene
Sobald die Kamera die Zielvorgabe erreicht und die Motoren angehalten haben, sendet die Firmware ein internes Signal “Position erreicht” an das AI-Verarbeitungsmodul. Die AI-Engine wartet auf 1-2 stabile Bilder (ca. 30-60ms bei 30fps), um zu bestätigen, dass sich das Bild nicht mehr bewegt.
Schritt 3: Sofortiger Re-Scan
Die KI-Engine führt ihr Erkennungsmodell mit dem ersten stabilen Bild aus. Bei unseren Kameras mit dedizierter NPU (Neural Processing Unit) 3 Hardware dauert eine Einzelbildanalyse etwa 30-50ms. Die Erkennung von Personen, Fahrzeugen und Eindringlingen erfolgt parallel.
| AI-Pipeline-Stufe | Erforderliche Zeit | Anmerkungen |
|---|---|---|
| Motordrehung (180°) | ~1,2-1,5 Sekunden | Soft-Start/Soft-Stop inklusive |
| Stabilisierung des Rahmens | ~30-60ms | Warten auf 1-2 saubere Bilder |
| Erste AI-Schlussfolgerung | ~30-50ms | NPU-beschleunigte Erkennung |
| Gesamtzeit bis zur ersten Entdeckung | ~1,3-1,6 Sekunden | Vom voreingestellten Anruf zum aktiven AI |
Warum dies für Kombinationen aus Wächterrundgang und AI wichtig ist
Wenn Sie einen Wachrundgang mit 16 Voreinstellungen und Verweilzeiten von 10 Sekunden durchführen, besucht die Kamera jede Voreinstellung 10 Sekunden lang. Wenn die KI 5 Sekunden braucht, um bei jedem Halt mit der Erkennung zu beginnen, erhalten Sie nur 5 Sekunden tatsächliche KI-Abdeckung pro Voreinstellung. Das ist ein Effizienzverlust von 50%.
Bei unserem System ist die KI innerhalb der ersten Sekunde aktiv. Sie erhalten etwa 9 von 10 Sekunden voller AI-Abdeckung bei jeder Voreinstellung. Über einen Zeitraum von 24 Stunden summiert sich dieser Unterschied zu Stunden zusätzlicher effektiver Überwachung.
Die Rolle der voreingestellten, verknüpften AI-Zonen
Unsere Kameras unterstützen außerdem voreingestellte verknüpfte Erkennungsbereiche. Das bedeutet, dass Sie für jede Voreinstellung unterschiedliche Einbruchserkennungsbereiche, Stolperdrahtlinien und Interessensgebiete zeichnen können. Wenn die Kamera bei Voreinstellung 5 ankommt, lädt sie automatisch die Erkennungsbereiche, die Sie für Voreinstellung 5 konfiguriert haben. Wenn sie zu Voreinstellung 12 wechselt, lädt sie die Bereiche für Voreinstellung 12. Dies alles wird im lokalen Speicher der Kamera gespeichert. Der NVR muss die Zonenkonfigurationen nicht bei jeder Änderung der Voreinstellung aktualisieren.
Diese Funktion ist entscheidend für Integratoren, die PTZ-Kameras in komplexen Umgebungen einsetzen. Eine einzelne Kamera kann ein Tor überwachen (Voreinstellung 1, mit einem Stolperdraht über dem Eingang), einen Parkplatz (Voreinstellung 5, mit einer Region von Interesse rund um die Fahrspur) und ein Dach (Voreinstellung 12, mit einer Einbruchszone entlang der Kante). Jede Szene hat völlig unterschiedliche Erkennungsanforderungen. Mit Voreinstellungen verknüpfte AI-Zonen erledigen dies automatisch.
Schlussfolgerung
Die 255 Voreinstellungen sind nicht nur eine Zahl auf einem Datenblatt. Sie werden von einer präzisen Motorsteuerung, prädiktiver Fokussierung, automatischer Kalibrierung und AI-fähiger Firmware unterstützt. Für Integratoren, die Geschwindigkeit, Genauigkeit und keine Drift über Jahre hinweg im 24/7-Betrieb benötigen, ist die Backend-Logik hinter jedem Preset-Aufruf das, was einen zuverlässigen Einsatz von einem kostspieligen Ausfall trennt.
1. System-on-Chip (SoC)-Architektur für PTZ-Preset-Lookup. ︎ 2. Pelco-D RS-485-Protokoll für PTZ-Kamerasteuerung. ︎ 3. Neural Processing Unit (NPU) für Edge AI Inferenz. ︎ 4. Nichtflüchtiger Speicher zur Speicherung von 255 Positionen. ︎ 5. Beschleunigter Lebensdauertest für PTZ-Motorgetriebeverschleiß. ︎ 6. Schrittmotor-Microstepping für gleichmäßige PTZ-Bewegung. ︎ 7. Trapezförmiges Geschwindigkeitsprofil im Vergleich zur Motorsteuerung mit Rechteckwellen. ︎ 8. Nullpunktkalibrierung des Optokopplers für voreingestellte Drift. ︎ 9. ONVIF-Standards für die Verwaltung von Voreinstellungen und Metadaten. ︎ 10. Region-of-Interest-Konfiguration (ROI) pro VMS-Voreinstellung. ︎