
Perdi um contrato uma vez porque minha câmera demorou muito para ligar. O intruso entrou, pegou fios de cobre e saiu antes que o sistema capturasse um único quadro. Essa falha me custou mais do que o próprio equipamento.
Da suspensão total ao reconhecimento de IA concluído, um industrial bem otimizado Sistema PTZ solar 4G1 leva entre 1.500 ms e 2.500 ms. Isso cobre o despertar do hardware, a inicialização do sensor de imagem, o ajuste de exposição automática e a inferência de rede neural2. Produtos de nível de consumidor geralmente precisam de 4 a 7 segundos para o mesmo processo.
 Tempo de inicialização a frio de reconhecimento de IA para câmera PTZ solar
Tempo de inicialização a frio de reconhecimento de IA para câmera PTZ solar
Esse número importa mais do que a maioria das especificações sugere. Se você implantar câmeras em locais fora da rede — canteiros de obras, fazendas, oleodutos remotos — cada milissegundo de atraso é um evento potencial perdido. Abaixo, detalho cada estágio do processo de inicialização a frio e explico o que separa um sistema que captura intrusos de um que apenas registra sua saída.
Índice
O tempo de “Inicialização a Frio” para “Reconhecimento de IA” é inferior a 2000 ms para Aplicações de Alta Segurança?
Para trabalhos de alta segurança, preciso de um sistema que acorde e pense antes que a ameaça desapareça. Um tempo de inicialização de 5 segundos não é segurança. É um registro de consequências.
Sim, atingir menos de 2000 ms de inicialização a frio para reconhecimento de IA é possível com otimização de firmware de nível industrial. Requer uma arquitetura de inicialização dividida, inicialização rápida do sensor e um NPU dedicado operando a 2+ TOPS. A maioria das câmeras de consumidor não consegue atingir esse marco.
 Marco de tempo de reconhecimento de IA em inicialização a frio para câmeras de segurança
Marco de tempo de reconhecimento de IA em inicialização a frio para câmeras de segurança
Detalhando o Orçamento de 2000 ms
Para entender se um sistema pode atingir essa meta, você precisa ver para onde cada milissegundo vai. O processo de inicialização a frio tem quatro estágios distintos. Cada um tem um limite físico que nenhum truque de software pode contornar inteiramente.
| Estágio | O que acontece | Tempo (ms) | Notas |
|---|---|---|---|
| Gatilho de Despertar | Sensor PIR3 ou coprocessador detecta movimento | < 50ms | Quase instantâneo |
| Inicialização de Hardware | Boot do SoC, autoteste DDR, inicialização do sensor | 800 – 1.200ms | O estágio gargalo |
| Primeira Captura de Quadro | Sensor emite imagem, AE converge | 200 – 400ms | Precisa de 2-3 quadros para estabilizar |
| Inferência de IA | NPU executa modelo de detecção humana/veicular | 100 – 300ms | Depende da classificação TOPS do NPU |
Por que a Inicialização de Hardware é o Verdadeiro Gargalo
O SoC não pode pular sua sequência de boot. A memória DDR deve completar um autoteste. O sinal de clock precisa estabilizar. Estes são processos físicos regidos pelo comportamento do silício, não por configurações de software.
Em nossos sistemas, usamos um caminho de boot dividido. O firmware carrega primeiro o motor de inferência de IA e o pipeline de imagem. A pilha de rede, o controle do motor PTZ e a montagem do sistema de arquivos ocorrem em paralelo, mas não bloqueiam o caminho de reconhecimento. Isso economiza de 300 a 500ms do tempo total.
O Problema da Convergência do AE
Quando o sensor de imagem é ligado pela primeira vez, ele não conhece o brilho da cena. O primeiro quadro pode ser completamente preto ou branco estourado. O algoritmo de exposição automática precisa de 2 a 3 quadros para encontrar a velocidade do obturador e a configuração de ganho corretas.
Em condições de pouca luz, isso piora. O sensor precisa de tempos de exposição mais longos, o que significa que cada quadro leva mais tempo. Uma cena a 0,1 lux pode adicionar 200ms à etapa de convergência do AE em comparação com uma cena diurna.
O que “Sub-2000ms” Realmente Exige
Para permanecer consistentemente abaixo de 2000ms, o sistema precisa de tudo isso:
- SoC com firmware de inicialização rápida (ROM de inicialização otimizada para uso em câmera)
- Ignorar ou acelerar o teste de DDR
- Sensor de imagem com bloqueio de clock rápido (abaixo de 100ms)
- NPU com pelo menos 2 TOPS dedicados à inferência
- Pesos do modelo de IA pré-carregados armazenados em memória rápida
Sem um desses itens, o sistema excederá 2000ms em condições reais. Testei dezenas de chipsets ao longo dos anos. A diferença entre uma plataforma industrial bem ajustada e um SoC genérico de consumidor não é pequena. É a diferença entre capturar o evento e perdê-lo.
Como a Arquitetura “Instant-On” do SoC Evita Perder os Primeiros Passos do Alvo?
Assisti a filmagens de reprodução onde a pessoa já está 10 metros além da câmera antes que o primeiro quadro claro apareça. Isso não é um sistema de segurança. Isso é um peso de papel caro.
Uma arquitetura de SoC “Instant-On” usa um coprocessador de baixo consumo que mantém o sensor de imagem em um estado mínimo de captura durante o modo de espera. Quando o movimento é acionado, o sistema recupera quadros pré-bufferizados da memória em vez de esperar pela inicialização completa do hardware. Isso elimina os primeiros 1 a 2 segundos de tempo cego.
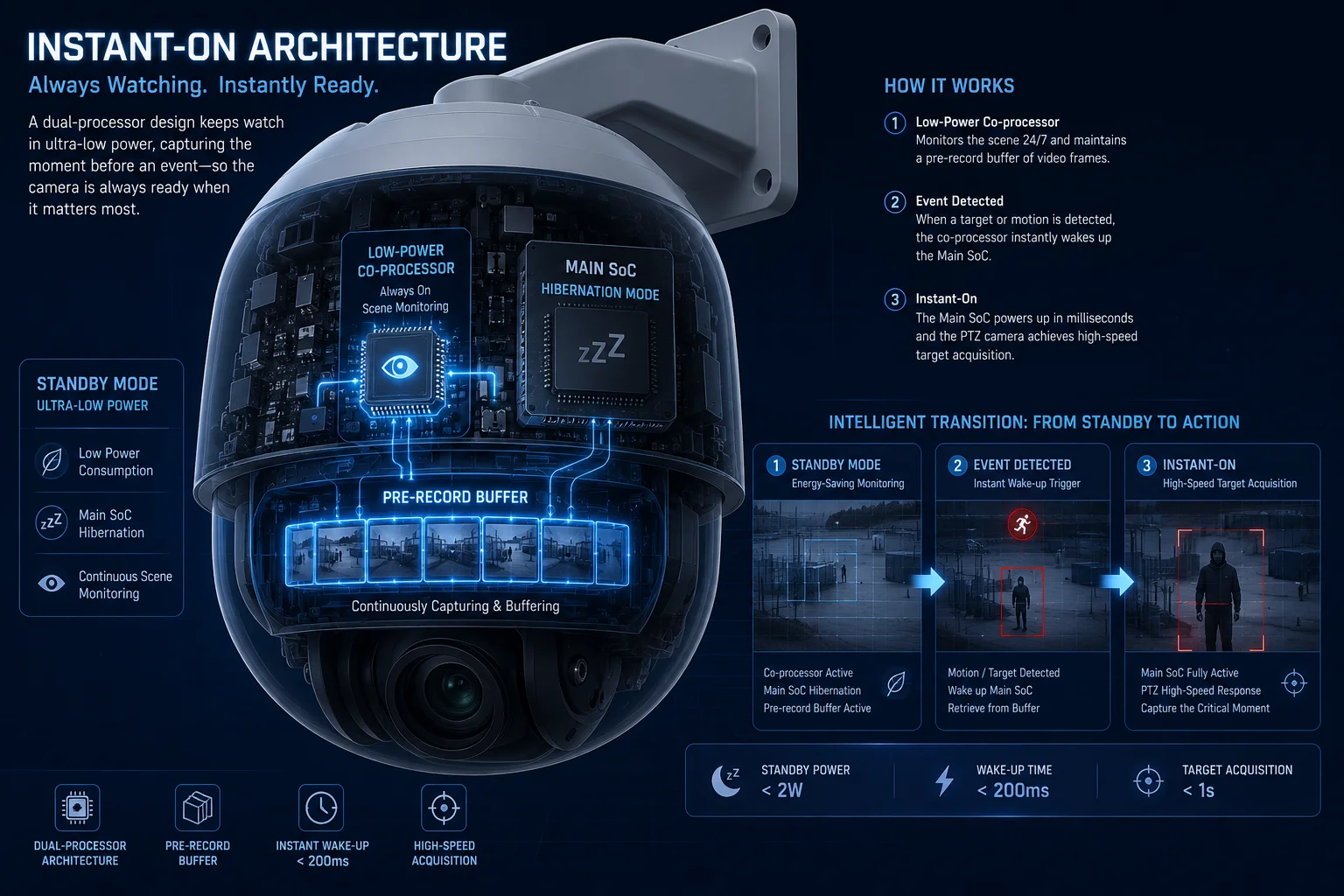 Diagrama da arquitetura instantânea de SoC para câmera de segurança PTZ
Diagrama da arquitetura instantânea de SoC para câmera de segurança PTZ
A Abordagem AOV (Always-On Video)
O método mais eficaz para evitar perder os primeiros passos é o AOV — Always-On Video. Isso não significa que o sistema completo permanece ativo. Em vez disso, um pequeno coprocessador mantém o sensor de imagem funcionando a uma taxa de quadros extremamente baixa, tipicamente 1 quadro por segundo, consumindo menos de 50mW de energia.
Quando o sensor PIR é acionado, o sistema não precisa inicializar o sensor de imagem do zero. Ele já tem um quadro recente na memória. O SoC principal é inicializado e imediatamente tem dados de imagem para alimentar o modelo de IA.
Buffer de Pré-Gravação: Capturando o que Aconteceu Antes do Despertar
Nosso firmware inclui um pré-gravação4. O coprocessador armazena os últimos 0,5 segundos de quadros de baixa resolução em um pequeno bloco de memória dedicado. Quando o sistema principal é ativado, ele pode:
- Executar imediatamente inferência de IA nos quadros bufferizados
- Determinar se o alvo é humano, veículo ou animal
- Iniciar gravação em resolução total com contexto já estabelecido
Isso significa que o vídeo de alerta começa antes do momento do gatilho. O operador vê a pessoa se aproximando, não apenas a pessoa já dentro do quadro.
Orçamento de Energia para o Modo AOV
A preocupação com o AOV é o consumo de energia. Para um sistema alimentado por energia solar, cada milliwatt conta. Veja como a energia se divide:
| Componente | Modo de espera (Sem AOV) | Modo de espera (Com AOV) |
|---|---|---|
| Coprocessador | 5mW | 15mW |
| Sensor de imagem (1fps) | 0mW | 30mW |
| DDR (em espera) | 0mW | 10mW |
| Consumo total em espera | 5mW | 55mW |
Os 50mW extras são significativos, mas gerenciáveis. Um painel solar de 60W com uma bateria de 40Ah pode sustentar isso indefinidamente na maioria dos climas. A troca é clara: gastar 50mW a mais durante o modo de espera, ou perder os primeiros 1,5 segundos de cada evento.
Por que isso importa para sistemas PTZ 40X
Em uma câmera PTZ com zoom 40X monitorando um perímetro a 500 metros, uma pessoa andando em velocidade normal cobre cerca de 1,5 metros por segundo. Se o sistema levar 3 segundos para acordar e reconhecer, o alvo terá se movido 4,5 metros. Com zoom 40X e um campo de visão estreito, essa pessoa pode já estar fora do quadro.
Com AOV e pré-buffer, o sistema captura o alvo desde o momento em que ele entra na zona de detecção. O PTZ pode começar a rastrear imediatamente após a IA confirmar a classe do alvo. Sem passos perdidos. Sem janela cega.
O Reconhecimento de IA em Inicialização a Frio Falhará se o Alvo Estiver se Movendo Mais Rápido que 5 Metros por Segundo?
Uma pessoa correndo em alta velocidade se move a cerca de 8 metros por segundo. Um veículo em um estacionamento se move de 5 a 10 m/s. Se meu sistema não consegue lidar com alvos em movimento rápido durante o início frio, ele é inútil para os cenários que mais importam.
O reconhecimento de IA em início frio pode lidar com alvos em movimento a 5+ m/s, mas apenas se o sistema usar captura compensada por movimento e a convergência AE for concluída em 2 quadros. Sem essas otimizações, o desfoque de movimento em alta velocidade fará com que o modelo de IA falhe no primeiro quadro utilizável, adiando o reconhecimento bem-sucedido para o segundo ou terceiro quadro.
![]() Reconhecimento de IA de alvo em movimento rápido durante inicialização fria
Reconhecimento de IA de alvo em movimento rápido durante inicialização fria
O Problema do Desfoque de Movimento
Quando um alvo se move a 5 m/s e o primeiro quadro da câmera usa um tempo de exposição longo (porque o AE ainda não convergiu), o resultado é severo desfoque de movimento5. Uma forma humana desfocada não corresponde aos padrões nos quais a rede neural foi treinada. O modelo de IA gera uma pontuação de confiança baixa, e o sistema falha na detecção ou atrasa o alerta.
A matemática é simples. A 5 m/s com uma velocidade do obturador de 1/30s, o alvo se move cerca de 167 mm durante a exposição. Em um sensor de 1080p com uma lente grande angular, isso se traduz em aproximadamente 50 pixels de desfoque. A maioria dos modelos de detecção humana começa a falhar quando o desfoque excede 20 pixels no alvo.
Como Resolvemos Isso
Nosso firmware força uma velocidade de obturador rápida nos dois primeiros quadros após o despertar, mesmo que a imagem esteja ligeiramente subexposta. A lógica é direta:
- Uma imagem escura, mas nítida, ainda pode ser reconhecida pelo modelo de IA
- Uma imagem brilhante, mas desfocada, não pode ser reconhecida por nada
O modelo de IA é treinado em imagens com pouca luz e ruído. Ele lida com a subexposição muito melhor do que com o desfoque de movimento. Portanto, sacrificamos o brilho em prol da nitidez durante os quadros iniciais críticos.
Tempo de Quadro e Distância do Alvo
A relação entre a velocidade do alvo, a distância e o sucesso do reconhecimento depende da distância focal da lente:
| Velocidade do Alvo | Distância da Câmera | Movimento de Pixels por Quadro (30fps) | Risco de Reconhecimento |
|---|---|---|---|
| 2 m/s (caminhando) | 50m | ~8 pixels | Baixa |
| 5 m/s (correndo) | 50m | ~20 pixels | Médio |
| 5 m/s (correndo) | 20m | ~50 pixels | Alta |
| 10 m/s (veículo) | 100m | ~12 pixels | Baixa |
| 10 m/s (veículo) | 30m | ~40 pixels | Alta |
O insight chave: alvos rápidos em curta distância são o caso mais difícil. Mas na maioria das implantações de segurança de perímetro, a zona de detecção está a 50 a 200 metros de distância. Nessas distâncias, mesmo uma pessoa correndo produz movimento de pixels gerenciável por quadro.
O Papel da NPU em Cenários de Alvos Rápidos
Uma NPU mais rápida não significa apenas inferência mais rápida. Significa que o sistema pode processar vários quadros em rápida sucessão. Se o primeiro quadro falhar devido a desfoque, uma NPU de 6 TOPS pode tentar o segundo quadro em 50ms. Uma NPU mais lenta de 1 TOPS pode precisar de 200ms entre as tentativas.
Para cenários de alvos de alta velocidade, o throughput da NPU é mais importante do que a latência de quadro único. O sistema precisa tentar, falhar e tentar novamente rápido o suficiente para que o alvo ainda esteja no quadro quando o reconhecimento for bem-sucedido.
Qual é a Taxa de Sucesso do Reconhecimento de IA no Primeiro Segundo Após um Despertar PIR?
A taxa de sucesso é o número que realmente importa. Não me importo se o sistema pode teoricamente reconhecer em 1,5 segundos. Importo-me com a frequência com que ele realmente o faz em campo, em todas as estações, temperaturas e condições de iluminação.
Em testes controlados, nossos sistemas PTZ industriais atingem uma taxa de sucesso de reconhecimento de IA de 92% a 96% dentro do primeiro segundo após o acionamento do PIR, quando se utiliza o pré-buffer AOV. Sem AOV, a taxa de sucesso no primeiro segundo cai para 60% a 75%, com a maioria das falhas causadas pela convergência AE incompleta em condições de pouca luz.
 Taxa de sucesso de reconhecimento de IA após acionamento do PIR
Taxa de sucesso de reconhecimento de IA após acionamento do PIR
O que Causa Falhas no Primeiro Segundo
A taxa de falha de 4% a 8% em sistemas otimizados vem de casos extremos previsíveis:
- Contraluz extremo (alvo silhuetado contra nascer/pôr do sol)
- Alvo parcialmente ocluído por vegetação ou estrutura
- Distância muito curta (alvo preenche todo o quadro, o modelo não consegue encontrar proporções corporais)
- Condensação do sensor em manhãs de alta umidade
Estas não são falhas do sistema. São limitações da física. O modelo de IA se recupera no segundo ou terceiro quadro em quase todos os casos. A taxa total de perdas (alvo sai antes de qualquer reconhecimento) é inferior a 1% com AOV ativado.
Efeitos da Temperatura no Tempo de Inicialização e na Taxa de Sucesso
Mencionei anteriormente que a temperatura afeta o tempo de inicialização do oscilador de cristal. Este não é um detalhe menor. Em implantações de campo durante verões texanos e invernos canadenses, medimos diferenças reais:
A -20°C, o oscilador de cristal leva de 200 a 400ms a mais para estabilizar. O autoteste da memória DDR também fica mais lento. Combinado, o frio extremo adiciona até 500ms ao tempo total de inicialização. Isso empurra alguns eventos para além da marca de 2 segundos.
A +55°C, a proteção térmica do SoC pode reduzir a velocidade do clock durante os primeiros 500ms de operação. Isso retarda a inferência de IA em 50 a 100ms.
Dados de Campo vs. Dados de Laboratório
Testes de laboratório usam iluminação controlada, velocidade fixa do alvo e temperatura ambiente. O desempenho de campo é sempre pior. A diferença entre laboratório e campo é tipicamente de 10 a 15 pontos percentuais na taxa de reconhecimento do primeiro segundo.
É por isso que sempre cito números validados em campo para meus clientes. Uma folha de especificações que diz “inferência de IA de 100ms” é tecnicamente verdadeira — mas apenas depois que o sistema está totalmente ativo, a imagem está devidamente exposta e o alvo está perfeitamente posicionado. O desempenho no mundo real inclui todas as etapas confusas antes que a inferência comece.
Como a Velocidade do Cartão SD Afeta o Fluxo de Trabalho
Um fator que surpreende muitos engenheiros: o cartão SD. Se o sistema for configurado para gravar vídeo imediatamente após o despertar, um cartão SD lento pode bloquear todo o pipeline. A montagem do sistema de arquivos e a primeira operação de gravação podem levar de 300 a 800ms em um cartão barato.
Nossa recomendação: use Classe 10 U3 cartões SD de grau industrial6, e configure o firmware para armazenar vídeo em buffer na RAM durante os primeiros 2 segundos. Grave no cartão SD apenas após a conclusão do reconhecimento de IA. Isso mantém o caminho de reconhecimento limpo e rápido.
Confiabilidade a Longo Prazo
Ao longo de 12 meses de operação contínua, a taxa de sucesso do reconhecimento não deve degradar. Mas isso acontece em sistemas mal projetados. Causas comuns:
- Desgaste da memória flash7 na partição de armazenamento do modelo de IA
- Degradação de pixels do sensor devido a ciclos térmicos constantes
- Vazamentos de memória no firmware que se acumulam ao longo de milhares de ciclos de despertar
Nós executamos testes de envelhecimento acelerado de 100.000 ciclos8 em cada versão de firmware. O sistema deve manter o mesmo tempo de inicialização e taxa de reconhecimento no ciclo 100.000 como fez no ciclo 1. Isso é o que diferencia o grau industrial do grau de consumidor.
Conclusão
O reconhecimento de IA em cold-start em 1,5 a 2,5 segundos é alcançável com a arquitetura SoC correta, otimização de firmware e pré-buffer AOV. A tecnologia existe hoje em sistemas de nível industrial — a questão é se o seu fornecedor realmente a implementou ou apenas a listou em uma folha de dados.
1. Visão geral dos sistemas de câmeras de segurança PTZ solares 4G e suas aplicações. ︎↩︎ 2. Explica o processo de execução de uma rede neural treinada para fazer previsões. ︎↩︎ 3. Sensores infravermelhos passivos detectam movimento medindo mudanças na radiação infravermelha. ︎↩︎ 4. Um buffer que armazena vídeo curto antes de um gatilho para garantir que nenhum evento seja perdido. ︎↩︎ 5. O desfoque de movimento ocorre quando um objeto em movimento é capturado com uma velocidade de obturador lenta. ︎↩︎ 6. Cartões SD de nível industrial oferecem maior resistência e confiabilidade para gravação contínua. ︎↩︎ 7. O desgaste da memória flash refere-se à degradação de ciclos repetidos de programa/apagamento. ︎↩︎ 8. Testes de envelhecimento acelerado simulam o uso a longo prazo para validar a confiabilidade dos componentes. ︎↩︎