
J'ai perdu un contrat une fois parce que ma caméra s'est réveillée trop lentement. L'intrus est entré, a volé du fil de cuivre et est parti avant même que le système n'ait capturé une seule image. Cet échec m'a coûté plus cher que l'équipement lui-même.
De la veille complète à la reconnaissance IA terminée, un système industriel bien optimisé Système solaire PTZ 4G1 prend entre 1 500 ms et 2 500 ms. Cela couvre le réveil du matériel, l'initialisation du capteur d'image, le réglage de l'exposition automatique et l'inférence du réseau neuronal2. Les produits grand public nécessitent généralement 4 à 7 secondes pour le même processus.
 Temps de démarrage à froid de la reconnaissance IA pour caméra PTZ solaire
Temps de démarrage à froid de la reconnaissance IA pour caméra PTZ solaire
Ce chiffre est plus important que ce que suggèrent la plupart des fiches techniques. Si vous déployez des caméras dans des endroits hors réseau — chantiers de construction, fermes, pipelines éloignés — chaque milliseconde de retard est un événement manqué potentiel. Ci-dessous, je détaille chaque étape du processus de démarrage à froid et j'explique ce qui sépare un système qui attrape les intrus de celui qui enregistre seulement leur sortie.
Table des matières
Le temps de “ démarrage à froid ” à “ reconnaissance IA ” est-il inférieur à 2000 ms pour les applications de haute sécurité ?
Pour les missions de haute sécurité, j'ai besoin d'un système qui se réveille et réfléchit avant que la menace ne disparaisse. Un temps de démarrage de 5 secondes n'est pas de la sécurité. C'est un enregistrement des conséquences.
Oui, il est possible d'atteindre un temps de démarrage à froid à reconnaissance IA inférieur à 2000 ms grâce à l'optimisation du firmware de qualité industrielle. Cela nécessite une architecture à démarrage fractionné, une initialisation rapide du capteur et un NPU dédié fonctionnant à plus de 2 TOPS. La plupart des caméras grand public ne peuvent pas atteindre ce niveau.
 Barème de temps de reconnaissance IA au démarrage à froid pour les caméras de sécurité
Barème de temps de reconnaissance IA au démarrage à froid pour les caméras de sécurité
Répartition du budget de 2000 ms
Pour comprendre si un système peut atteindre cet objectif, vous devez voir où va chaque milliseconde. Le processus de démarrage à froid comporte quatre étapes distinctes. Chacune a une limite physique qu'aucun truc logiciel ne peut contourner entièrement.
| Étape | Ce qui se passe | Temps (ms) | Notes |
|---|---|---|---|
| Déclencheur de réveil | Capteur PIR3 ou le coprocesseur détecte un mouvement | < 50 ms | Quasi instantané |
| Mise sous tension matérielle | Démarrage du SoC, auto-test DDR, initialisation des capteurs | 800 – 1 200 ms | L'étape du goulot d'étranglement |
| Première capture d'image | Le capteur produit une image, l'AE converge | 200 – 400 ms | Nécessite 2-3 images pour se stabiliser |
| Inférence IA | Le NPU exécute le modèle de détection d'humains/véhicules | 100 – 300 ms | Dépend de la puissance TOPS du NPU |
Pourquoi la mise sous tension matérielle est le véritable goulot d'étranglement
Le SoC ne peut pas sauter sa séquence de démarrage. La mémoire DDR doit terminer un auto-test. Le signal d'horloge doit se stabiliser. Ce sont des processus physiques régis par le comportement du silicium, pas par des paramètres logiciels.
Dans nos systèmes, nous utilisons un chemin de démarrage divisé. Le firmware charge d'abord le moteur d'inférence IA et le pipeline d'images. La pile réseau, le contrôle du moteur PTZ et le montage du système de fichiers se font en parallèle mais ne bloquent pas le chemin de reconnaissance. Cela réduit le temps total de 300 à 500 ms.
Le problème de la convergence AE
Lorsque le capteur d'image est mis sous tension pour la première fois, il ne connaît pas la luminosité de la scène. La première image peut être complètement noire ou surexposée en blanc. L'algorithme d'exposition automatique a besoin de 2 à 3 images pour trouver le bon réglage de vitesse d'obturation et de gain.
Dans des conditions de faible luminosité, cela s'aggrave. Le capteur a besoin de temps d'exposition plus longs, ce qui signifie que chaque image prend plus de temps. Une scène à 0,1 lux peut ajouter 200 ms à l'étape de convergence AE par rapport à une scène de jour.
Ce que “Moins de 2000 ms” nécessite réellement
Pour rester constamment sous 2000 ms, le système a besoin de tout cela :
- SoC avec firmware de démarrage rapide (ROM de démarrage optimisée pour l'utilisation de la caméra)
- Contournement ou vérification accélérée de l'auto-test DDR
- Capteur d'image avec verrouillage d'horloge rapide (moins de 100 ms)
- NPU avec au moins 2 TOPS dédiés à l'inférence
- Poids du modèle IA préchargés stockés dans une mémoire rapide
Sans l'un de ces éléments, le système dépassera 2000 ms dans des conditions réelles. J'ai testé des dizaines de chipsets au fil des ans. L'écart entre une plateforme industrielle bien réglée et un SoC grand public générique n'est pas mince. C'est la différence entre attraper l'événement et le manquer.
Comment l'architecture “ Instant-On ” du SoC empêche-t-elle de perdre les premières étapes de la cible ?
J'ai regardé des enregistrements où la personne est déjà à 10 mètres de la caméra avant que la première image nette n'apparaisse. Ce n'est pas un système de sécurité. C'est un presse-papiers coûteux.
Une architecture SoC “Instant-On” utilise un coprocesseur basse consommation qui maintient le capteur d'image dans un état de capture minimal pendant la veille. Lorsqu'un mouvement est détecté, le système récupère des images pré-tamponnées de la mémoire au lieu d'attendre une initialisation matérielle complète. Cela élimine les 1 à 2 premières secondes de temps aveugle.
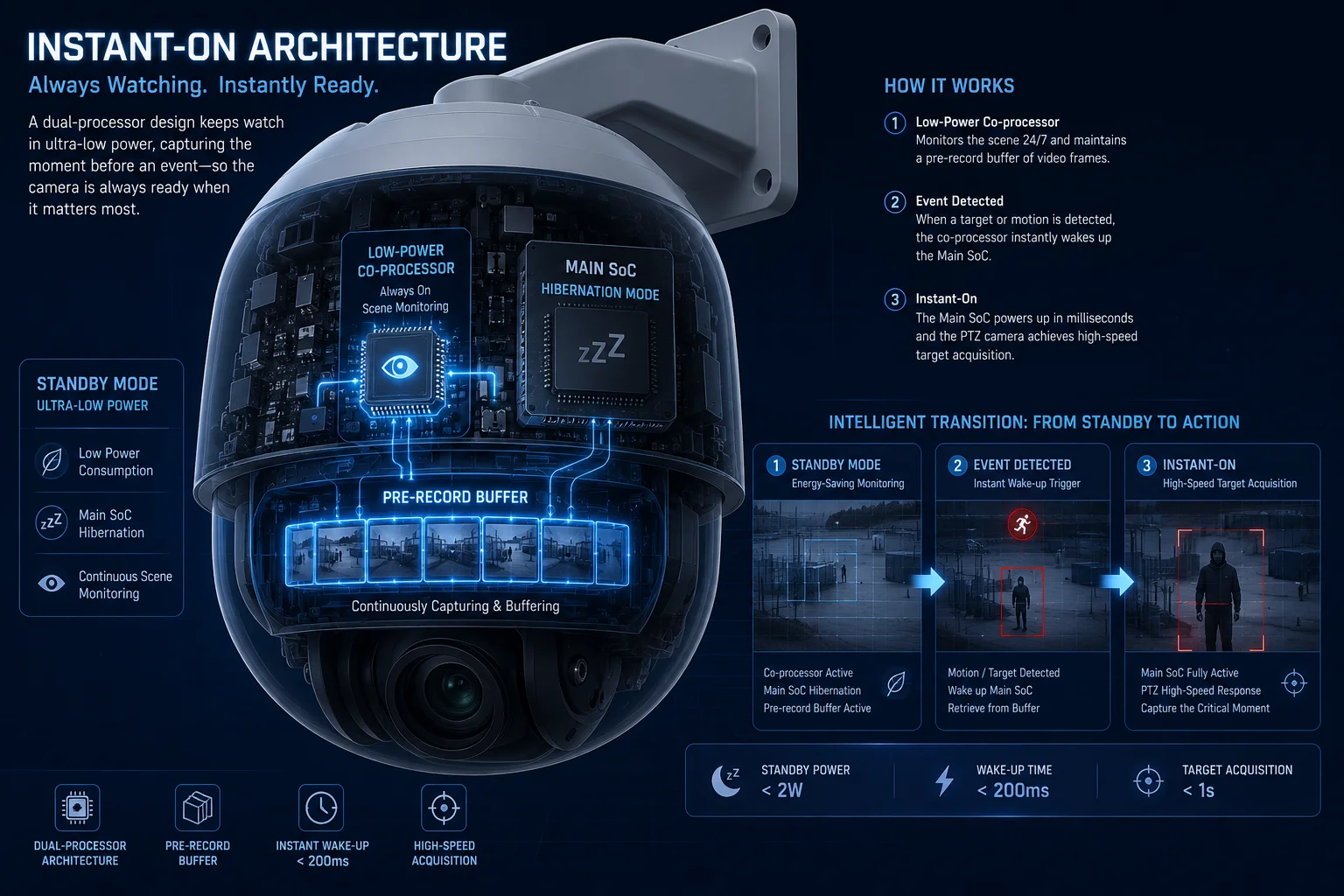 Diagramme d'architecture instantanée SoC pour caméra de sécurité PTZ
Diagramme d'architecture instantanée SoC pour caméra de sécurité PTZ
L'approche AOV (Always-On Video)
La méthode la plus efficace pour éviter de manquer les premières étapes est l'AOV — Always-On Video. Cela ne signifie pas que le système complet reste éveillé. Au lieu de cela, un minuscule coprocesseur maintient le capteur d'image en fonctionnement à une fréquence d'images extrêmement faible, généralement 1 image par seconde, tout en consommant moins de 50 mW de puissance.
Lorsque le capteur PIR se déclenche, le système n'a pas besoin d'initialiser le capteur d'image à partir de zéro. Il dispose déjà d'une image récente en mémoire. Le SoC principal démarre et dispose immédiatement de données d'image à fournir au modèle IA.
Tampon de pré-enregistrement : Capturer ce qui s'est passé avant le réveil
Notre firmware comprend une de 5 à 10 secondes4. Le coprocesseur stocke les 0,5 dernières secondes d'images basse résolution dans un petit bloc de mémoire dédié. Lorsque le système principal se réveille, il peut :
- Exécuter immédiatement l'inférence IA sur les images mises en mémoire tampon
- Déterminer si la cible est humaine, un véhicule ou un animal
- Commencer l'enregistrement en pleine résolution avec le contexte déjà établi
Cela signifie que la vidéo d'alerte commence avant le moment du déclenchement. L'opérateur voit la personne approcher, pas seulement la personne déjà dans le cadre.
Budget d'alimentation pour le mode AOV
La préoccupation avec l'AOV est la consommation d'énergie. Pour un système alimenté à l'énergie solaire, chaque milliwatt compte. Voici comment l'énergie se répartit :
| Composant | Mode veille (sans AOV) | Mode veille (avec AOV) |
|---|---|---|
| Coprocesseur | 5mW | 15mW |
| Capteur d'image (1 ips) | 0mW | 30mW |
| DDR (veille) | 0mW | 10mW |
| Consommation totale en veille | 5mW | 55mW |
Les 50mW supplémentaires sont significatifs mais gérables. Un panneau solaire de 60W avec une batterie de 40Ah peut maintenir cela indéfiniment dans la plupart des climats. Le compromis est clair : dépenser 50mW de plus pendant la veille, ou perdre les 1,5 premières secondes de chaque événement.
Pourquoi cela est important pour les systèmes PTZ 40X
Sur une caméra PTZ à zoom 40X surveillant un périmètre à 500 mètres, une personne marchant à vitesse normale parcourt environ 1,5 mètre par seconde. Si le système met 3 secondes à se réveiller et à reconnaître, la cible a parcouru 4,5 mètres. À un zoom 40X avec un champ de vision étroit, cette personne pourrait déjà être hors du cadre.
Avec l'AOV et le pré-buffering, le système capture la cible dès qu'elle entre dans la zone de détection. Le PTZ peut commencer le suivi immédiatement après que l'IA a confirmé la classe de la cible. Pas de pas perdus. Pas de fenêtre aveugle.
La reconnaissance IA au démarrage à froid échouera-t-elle si la cible se déplace plus vite que 5 mètres par seconde ?
Une personne courant à toute vitesse se déplace à environ 8 mètres par seconde. Un véhicule dans un parking se déplace à 5 à 10 m/s. Si mon système ne peut pas gérer les cibles en mouvement rapide lors d'un démarrage à froid, il est inutile pour les scénarios les plus importants.
La reconnaissance IA au démarrage à froid peut gérer des cibles se déplaçant à plus de 5 m/s, mais seulement si le système utilise une capture compensée par le mouvement et que la convergence AE s'achève dans les 2 images. Sans ces optimisations, le flou de mouvement à grande vitesse fera échouer le modèle IA sur la première image utilisable, repoussant la reconnaissance réussie à la deuxième ou troisième image.
![]() Reconnaissance IA de cibles en mouvement rapide lors du démarrage à froid
Reconnaissance IA de cibles en mouvement rapide lors du démarrage à froid
Le problème du flou de mouvement
Lorsqu'une cible se déplace à 5 m/s et que la première image de la caméra utilise un temps d'exposition long (car l'AE n'a pas encore convergé), le résultat est un flou de mouvement sévère. flou de mouvement5. Une forme humaine floue ne correspond pas aux modèles sur lesquels le réseau neuronal a été entraîné. Le modèle d'IA produit un score de confiance faible, et le système manque la détection ou retarde l'alerte.
Le calcul est simple. À 5 m/s avec une vitesse d'obturation de 1/30 s, la cible se déplace d'environ 167 mm pendant l'exposition. Sur un capteur 1080p avec un objectif grand angle, cela se traduit par environ 50 pixels de flou. La plupart des modèles de détection humaine commencent à échouer lorsque le flou dépasse 20 pixels sur la cible.
Comment nous résolvons ce problème
Notre firmware force une vitesse d'obturation rapide sur les deux premières images après le réveil, même si l'image est légèrement sous-exposée. La logique est simple :
- Une image sombre mais nette peut toujours être reconnue par le modèle d'IA.
- Une image lumineuse mais floue ne peut être reconnue par rien.
Le modèle d'IA est entraîné sur des images bruitées en basse lumière. Il gère la sous-exposition beaucoup mieux qu'il ne gère le flou de mouvement. Nous sacrifions donc la luminosité au profit de la netteté pendant les premières images critiques.
Synchronisation des images et distance de la cible
La relation entre la vitesse de la cible, la distance et le succès de la reconnaissance dépend de la distance focale de l'objectif :
| Vitesse de la cible | Distance par rapport à la caméra | Mouvement en pixels par image (30 ips) | Risque de reconnaissance |
|---|---|---|---|
| 2 m/s (marche) | 50 m | ~8 pixels | Faible |
| 5 m/s (course) | 50 m | ~20 pixels | Moyen |
| 5 m/s (course) | 20 m | ~50 pixels | Haut |
| 10 m/s (véhicule) | 100m | ~12 pixels | Faible |
| 10 m/s (véhicule) | 30m | ~40 pixels | Haut |
L'idée clé : les cibles rapides à courte portée sont le cas le plus difficile. Mais dans la plupart des déploiements de sécurité périmétrique, la zone de détection se situe entre 50 et 200 mètres. À ces distances, même une personne qui court produit un mouvement de pixels gérable par image.
Le rôle du NPU dans les scénarios de cibles rapides
Un NPU plus rapide ne signifie pas seulement une inférence plus rapide. Cela signifie que le système peut traiter plusieurs images en succession rapide. Si la première image échoue en raison du flou, un NPU de 6 TOPS peut tenter la deuxième image en moins de 50 ms. Un NPU plus lent de 1 TOPS pourrait nécessiter 200 ms entre les tentatives.
Pour les scénarios de cibles à haute vitesse, le débit du NPU est plus important que la latence d'une seule image. Le système doit essayer, échouer et réessayer assez rapidement pour que la cible soit toujours dans le champ de vision lorsque la reconnaissance réussit.
Quel est le taux de réussite de la reconnaissance IA dans la première seconde après un réveil PIR ?
Le taux de réussite est le chiffre qui compte vraiment. Peu m'importe si le système peut théoriquement reconnaître en 1,5 seconde. Ce qui m'importe, c'est la fréquence à laquelle il le fait sur le terrain, quelles que soient les saisons, les températures et les conditions d'éclairage.
Dans des tests contrôlés, nos systèmes PTZ industriels atteignent un taux de réussite de reconnaissance IA de 92 % à 96 % dans la première seconde après le réveil PIR lors de l'utilisation du pré-tampon AOV. Sans AOV, le taux de réussite de la première seconde tombe à 60 % à 75 %, la plupart des échecs étant causés par une convergence AE incomplète dans des conditions de faible luminosité.
 Taux de réussite de la reconnaissance IA après le réveil PIR
Taux de réussite de la reconnaissance IA après le réveil PIR
Causes des échecs de la première seconde
Le taux d'échec de 4 % à 8 % dans les systèmes optimisés provient de cas limites prévisibles :
- Contre-jour extrême (cible en silhouette devant le lever/coucher du soleil)
- Cible partiellement occultée par la végétation ou une structure
- Portée très courte (la cible remplit tout le cadre, le modèle ne peut pas trouver les proportions du corps)
- Condensation du capteur les matins de forte humidité
Ce ne sont pas des défaillances du système. Ce sont des limitations physiques. Le modèle d'IA récupère sur la deuxième ou troisième image dans presque tous les cas. Le taux de non-détection total (la cible disparaît avant toute reconnaissance) est inférieur à 1 % avec l'AOV activé.
Effets de la température sur le temps de démarrage et le taux de réussite
J'ai mentionné plus tôt que la température affecte le temps de démarrage de l'oscillateur à cristal. Ce n'est pas un détail mineur. Lors de déploiements sur le terrain pendant les étés texans et les hivers canadiens, nous avons mesuré des différences réelles :
À -20°C, l'oscillateur à cristal met 200 à 400 ms de plus à se stabiliser. L'auto-test de la mémoire DDR ralentit également. Combiné, le froid extrême ajoute jusqu'à 500 ms au temps de démarrage total. Cela repousse certains événements au-delà de la barre des 2 secondes.
À +55°C, la protection thermique du SoC peut réduire la vitesse d'horloge pendant les 500 premières millisecondes de fonctionnement. Cela ralentit l'inférence IA de 50 à 100 ms.
Données terrain vs Données laboratoire
Les tests en laboratoire utilisent un éclairage contrôlé, une vitesse cible fixe et une température ambiante. Les performances sur le terrain sont toujours moins bonnes. L'écart entre le laboratoire et le terrain est généralement de 10 à 15 points de pourcentage sur le taux de reconnaissance de la première seconde.
C'est pourquoi je cite toujours des chiffres validés sur le terrain à mes clients. Une fiche technique indiquant “inférence IA de 100 ms” est techniquement vraie - mais seulement après que le système soit complètement réveillé, que l'image soit correctement exposée et que la cible soit parfaitement positionnée. Les performances du monde réel incluent toutes les étapes complexes avant le début de l'inférence.
Comment la vitesse de la carte SD affecte le flux de travail
Un facteur qui surprend de nombreux ingénieurs : la carte SD. Si le système est configuré pour écrire la vidéo immédiatement après le réveil, une carte SD lente peut bloquer tout le pipeline. Le montage du système de fichiers et la première opération d'écriture peuvent prendre 300 à 800 ms sur une carte bon marché.
Notre recommandation : utiliser des cartes SD de classe 10 U3 de qualité industrielle6, et configurer le firmware pour mettre en mémoire tampon la vidéo dans la RAM pendant les 2 premières secondes. Écrire sur la carte SD uniquement après la fin de la reconnaissance IA. Cela maintient le chemin de reconnaissance propre et rapide.
Fiabilité à long terme
Sur 12 mois de fonctionnement continu, le taux de succès de la reconnaissance ne devrait pas se dégrader. Mais cela se produit sur des systèmes mal conçus. Causes courantes :
- Usure de la mémoire flash7 sur la partition de stockage du modèle IA
- Dégradation des pixels du capteur due aux cycles thermiques constants
- Fuites de mémoire du firmware qui s'accumulent sur des milliers de cycles de réveil
Nous effectuons des tests de vieillissement accéléré sur 100 000 cycles8 sur chaque version du firmware. Le système doit maintenir le même temps de démarrage et le même taux de reconnaissance au cycle 100 000 qu'au cycle 1. C'est ce qui distingue la qualité industrielle de la qualité grand public.
Conclusion
La reconnaissance IA au démarrage à froid en 1,5 à 2,5 secondes est réalisable avec une architecture SoC appropriée, une optimisation du firmware et un pré-buffering AOV. La technologie existe aujourd'hui dans les systèmes de qualité industrielle — la question est de savoir si votre fournisseur l'a réellement mise en œuvre ou simplement listée sur une fiche technique.
1. Aperçu des systèmes de caméras de sécurité PTZ solaires 4G et de leurs applications. ︎↩︎ 2. Explique le processus d'exécution d'un réseau neuronal entraîné pour faire des prédictions. ︎↩︎ 3. Les capteurs infrarouges passifs détectent le mouvement en mesurant les changements de rayonnement infrarouge. ︎↩︎ 4. Un tampon qui stocke une courte vidéo avant un déclencheur pour s'assurer qu'aucun événement n'est manqué. ︎↩︎ 5. Le flou de mouvement se produit lorsqu'un objet en mouvement est capturé avec une vitesse d'obturation lente. ︎↩︎ 6. Les cartes SD de qualité industrielle offrent une endurance et une fiabilité accrues pour l'enregistrement continu. ︎↩︎ 7. L'usure de la mémoire flash fait référence à la dégradation due aux cycles répétés de programmation/effacement. ︎↩︎ 8. Les tests de vieillissement accéléré simulent une utilisation à long terme pour valider la fiabilité des composants. ︎↩︎