
Ich habe einmal einen Vertrag verloren, weil meine Kamera zu langsam aufwachte. Der Einbrecher kam herein, schnappte sich Kupferkabel und verschwand, bevor das System auch nur ein einziges Bild erfasst hatte. Dieses Versagen kostete mich mehr als die Ausrüstung selbst.
Vom vollständigen Ruhezustand bis zur abgeschlossenen KI-Erkennung benötigt ein gut optimiertes Industrie- 4G Solar PTZ System1 System zwischen 1.500 ms und 2.500 ms. Dies umfasst Hardware-Aufwachzeit, Initialisierung des Bildsensors, automatische Belichtungsanpassung und Inferenz des neuronalen Netzes2. Produkte für den Verbrauchermarkt benötigen für denselben Prozess typischerweise 4 bis 7 Sekunden.
 KI-Erkennungs-Kaltstartzeit für Solar-PTZ-Kameras
KI-Erkennungs-Kaltstartzeit für Solar-PTZ-Kameras
Diese Zahl ist wichtiger, als die meisten technischen Datenblätter vermuten lassen. Wenn Sie Kameras an abgelegenen Standorten einsetzen – Baustellen, Bauernhöfe, abgelegene Pipelines – ist jede Millisekunde Verzögerung ein potenziell verpasstes Ereignis. Im Folgenden zerlege ich jede Phase des Kaltstartprozesses und erkläre, was ein System, das Einbrecher erfasst, von einem unterscheidet, das nur deren Flucht aufzeichnet.
Inhaltsübersicht
Liegt die Zeit von “Kaltstart” bis “KI-Erkennung” unter 2000 ms für Hochsicherheitsanwendungen?
Für Hochsicherheitsaufgaben benötige ich ein System, das aufwacht und denkt, bevor die Bedrohung verschwindet. Eine Bootzeit von 5 Sekunden ist keine Sicherheit. Es ist eine Aufzeichnung von Konsequenzen.
Ja, eine Kaltstart-KI-Erkennung von unter 2000 ms ist mit industrieller Firmware-Optimierung möglich. Sie erfordert eine Split-Boot-Architektur, schnelle Sensorinitialisierung und eine dedizierte NPU mit 2+ TOPS. Die meisten Consumer-Kameras erreichen diesen Meilenstein nicht.
 Benchmark für die Kaltstart-KI-Erkennungszeit von Überwachungskameras
Benchmark für die Kaltstart-KI-Erkennungszeit von Überwachungskameras
Aufschlüsselung des 2000-ms-Budgets
Um zu verstehen, ob ein System dieses Ziel erreichen kann, müssen Sie sehen, wohin jede Millisekunde fließt. Der Kaltstartprozess hat vier verschiedene Phasen. Jede hat eine physikalische Grenze, die kein Software-Trick vollständig umgehen kann.
| Stufe | Was passiert | Zeit (ms) | Anmerkungen |
|---|---|---|---|
| Auslöser für das Aufwachen | PIR-Sensor3 oder ein Coprozessor erkennt Bewegung | < 50ms | Fast |
| Hardware-Start | SoC-Boot, DDR-Selbsttest, Sensor-Initialisierung | 800 – 1.200ms | Die Engpass-Phase |
| Erste Bildaufnahme | Sensor gibt Bild aus, AE konvergiert | 200 – 400ms | Benötigt 2-3 Bilder zur Stabilisierung |
| KI-Inferenz | NPU führt Modell zur Erkennung von Menschen/Fahrzeugen aus | 100 – 300ms | Hängt von der NPU-TOPS-Bewertung ab |
Warum der Hardware-Start der eigentliche Engpass ist
Der SoC kann seine Boot-Sequenz nicht überspringen. Der DDR-Speicher muss einen Selbsttest abschließen. Das Taktsignal muss sich stabilisieren. Dies sind physikalische Prozesse, die durch das Verhalten des Siliziums bestimmt werden, nicht durch Software-Einstellungen.
In unseren Systemen verwenden wir einen geteilten Boot-Pfad. Die Firmware lädt zuerst die KI-Inferenz-Engine und die Bildpipeline. Der Netzwerkstack, die PTZ-Motorsteuerung und das Mounten des Dateisystems erfolgen parallel, blockieren aber nicht den Erkennungspfad. Dies spart 300 bis 500 ms von der Gesamtzeit.
Das AE-Konvergenzproblem
Wenn der Bildsensor zum ersten Mal eingeschaltet wird, kennt er die Helligkeit der Szene nicht. Das erste Bild kann komplett schwarz oder weiß überbelichtet sein. Der automatische Belichtungsalgorithmus benötigt 2 bis 3 Bilder, um die richtige Verschlusszeit und Gain-Einstellung zu finden.
Bei schlechten Lichtverhältnissen wird dies schlimmer. Der Sensor benötigt längere Belichtungszeiten, was bedeutet, dass jedes Bild mehr Zeit benötigt. Eine Szene bei 0,1 Lux kann den AE-Konvergenzschritt im Vergleich zu einer Tageslichtszene um 200 ms verlängern.
Was “Sub-2000ms” tatsächlich erfordert
Um konstant unter 2000 ms zu bleiben, benötigt das System all dies:
- SoC mit Fast-Boot-Firmware (Boot-ROM optimiert für Kameraeinsatz)
- DDR-Selbsttest-Umgehung oder beschleunigte Prüfung
- Bildsensor mit schnellem Clock-Lock (unter 100 ms)
- NPU mit mindestens 2 TOPS, dediziert für Inferenz
- Vorab geladene KI-Modellgewichte, gespeichert in schnellem Speicher
Ohne eines dieser Elemente überschreitet das System unter realen Bedingungen 2000 ms. Ich habe im Laufe der Jahre Dutzende von Chipsätzen getestet. Die Lücke zwischen einer gut abgestimmten Industrieplattform und einem generischen Consumer-SoC ist nicht klein. Es ist der Unterschied zwischen dem Erfassen des Ereignisses und dem Verpassen.
Wie verhindert die “Instant-On”-Architektur des SoC, dass die ersten Schritte des Ziels verloren gehen?
Ich habe Wiedergabematerial gesehen, bei dem die Person bereits 10 Meter an der Kamera vorbeigegangen ist, bevor das erste klare Bild erscheint. Das ist kein Sicherheitssystem. Das ist ein teurer Briefbeschwerer.
Eine “Instant-On”-SoC-Architektur verwendet einen energiearmen Coprozessor, der den Bildsensor im Ruhezustand in einem minimalen Aufnahmezustand hält. Wenn Bewegung ausgelöst wird, ruft das System vorab gepufferte Bilder aus dem Speicher ab, anstatt auf die vollständige Hardwareinitialisierung zu warten. Dies eliminiert die ersten 1 bis 2 Sekunden der blinden Zeit.
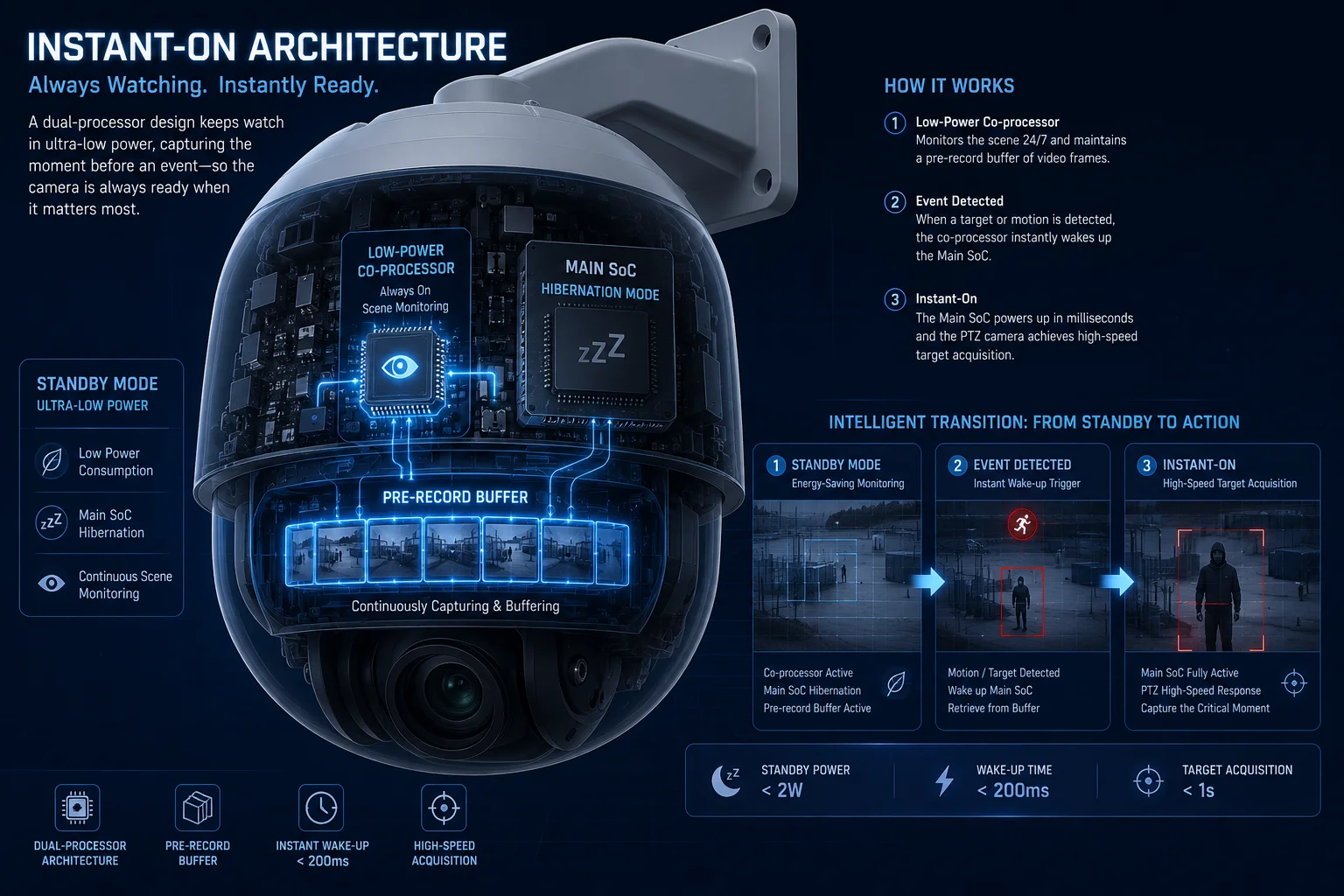 SoC Instant-On-Architekturdiagramm für PTZ-Sicherheitskameras
SoC Instant-On-Architekturdiagramm für PTZ-Sicherheitskameras
Der AOV-Ansatz (Always-On Video)
Die effektivste Methode, um das Verpassen der ersten Schritte zu verhindern, ist AOV – Always-On Video. Das bedeutet nicht, dass das gesamte System wach bleibt. Stattdessen hält ein winziger Coprozessor den Bildsensor mit einer extrem niedrigen Bildrate, typischerweise 1 Bild pro Sekunde, am Laufen, während er unter 50 mW Strom verbraucht.
Wenn der PIR-Sensor auslöst, muss das System den Bildsensor nicht von Grund auf neu initialisieren. Es hat bereits ein aktuelles Bild im Speicher. Der Haupt-SoC bootet und hat sofort Bilddaten, die in das KI-Modell eingespeist werden können.
Pre-Record-Puffer: Erfassen, was vor dem Aufwachen passiert ist
Unsere Firmware beinhaltet eine Voraufzeichnungspuffer4. Der Coprozessor speichert die letzten 0,5 Sekunden von Bildern mit niedriger Auflösung in einem kleinen dedizierten Speicherblock. Wenn das Hauptsystem aufwacht, kann es:
- Sofort KI-Inferenz auf den gepufferten Bildern durchführen
- Feststellen, ob das Ziel ein Mensch, ein Fahrzeug oder ein Tier ist
- Mit bereits etabliertem Kontext mit der Aufnahme in voller Auflösung beginnen
Das bedeutet, dass das Alarmvideo vor dem Auslösemoment beginnt. Der Bediener sieht die sich nähernde Person, nicht nur die Person, die sich bereits im Bild befindet.
Energiebudget für den AOV-Modus
Die Sorge bei AOV ist der Stromverbrauch. Bei einem solarbetriebenen System zählt jedes Milliwatt. Hier ist die Aufschlüsselung des Stromverbrauchs:
| Komponente | Schlafmodus (ohne AOV) | Schlafmodus (mit AOV) |
|---|---|---|
| Coprozessor | 5mW | 15mW |
| Bildsensor (1fps) | 0mW | 30mW |
| DDR (Standby) | 0mW | 10mW |
| Gesamter Standby-Stromverbrauch | 5mW | 55mW |
Die zusätzlichen 50mW sind bedeutsam, aber beherrschbar. Ein 60W Solarpanel mit einem 40Ah Akku kann dies in den meisten Klimazonen unbegrenzt aufrechterhalten. Der Kompromiss ist klar: 50mW mehr im Schlafmodus verbrauchen oder die ersten 1,5 Sekunden jedes Ereignisses verlieren.
Warum das für 40X PTZ-Systeme wichtig ist
Bei einer 40X-Zoom-PTZ-Kamera, die einen Perimeter in 500 Metern Entfernung überwacht, legt eine Person mit normaler Geschwindigkeit etwa 1,5 Meter pro Sekunde zurück. Wenn das System 3 Sekunden zum Aufwachen und Erkennen benötigt, hat sich das Ziel 4,5 Meter bewegt. Bei 40-fachem Zoom mit einem engen Sichtfeld könnte diese Person bereits außerhalb des Bildes sein.
Mit AOV und Vorpufferung erfasst das System das Ziel ab dem Moment, in dem es die Erkennungszone betritt. Die PTZ kann sofort mit der Verfolgung beginnen, nachdem die KI die Zielklasse bestätigt hat. Keine verlorenen Schritte. Kein blinder Fleck.
Schlägt die Kaltstart-KI-Erkennung fehl, wenn sich das Ziel schneller als 5 Meter pro Sekunde bewegt?
Eine Person, die im vollen Sprint läuft, bewegt sich mit etwa 8 Metern pro Sekunde. Ein Fahrzeug auf einem Parkplatz bewegt sich mit 5 bis 10 m/s. Wenn mein System keine schnell bewegten Ziele während des Kaltstarts verarbeiten kann, ist es für die wichtigsten Szenarien nutzlos.
Die KI-Erkennung beim Kaltstart kann sich bewegende Ziele mit 5+ m/s verarbeiten, aber nur, wenn das System bewegungskompensierte Erfassung verwendet und die AE-Konvergenz innerhalb von 2 Bildern abgeschlossen ist. Ohne diese Optimierungen führt Bewegungsunschärfe bei hoher Geschwindigkeit dazu, dass das KI-Modell beim ersten nutzbaren Bild fehlschlägt, wodurch die erfolgreiche Erkennung auf das zweite oder dritte Bild verschoben wird.
![]() KI-Erkennung von schnell bewegten Zielen beim Kaltstart
KI-Erkennung von schnell bewegten Zielen beim Kaltstart
Das Problem der Bewegungsunschärfe
Wenn sich ein Ziel mit 5 m/s bewegt und der erste Frame der Kamera eine lange Belichtungszeit verwendet (da AE noch nicht konvergiert ist), ist das Ergebnis schwerwiegend Bewegungsunschärfe5. Eine unscharfe menschliche Form passt nicht zu den Mustern, auf denen das neuronale Netz trainiert wurde. Das KI-Modell gibt einen niedrigen Konfidenzwert aus, und das System verpasst die Erkennung oder verzögert die Warnung.
Die Mathematik ist einfach. Bei 5 m/s mit einer Verschlusszeit von 1/30 s bewegt sich das Ziel während der Belichtung etwa 167 mm. Auf einem 1080p-Sensor mit einem Weitwinkelobjektiv entspricht dies etwa 50 Pixeln Unschärfe. Die meisten Modelle zur Erkennung von Menschen beginnen zu versagen, wenn die Unschärfe 20 Pixel am Ziel überschreitet.
Wie wir das lösen
Unsere Firmware erzwingt eine schnelle Verschlusszeit für die ersten beiden Frames nach dem Aufwachen, auch wenn das Bild leicht unterbelichtet ist. Die Logik ist einfach:
- Ein dunkles, aber scharfes Bild kann vom KI-Modell immer noch erkannt werden
- Ein helles, aber unscharfes Bild kann von nichts erkannt werden
Das KI-Modell ist auf Bilder bei schwachem Licht und mit Rauschen trainiert. Es kommt mit Unterbelichtung viel besser zurecht als mit Bewegungsunschärfe. Daher opfern wir Helligkeit für Schärfe während der kritischen ersten Frames.
Frame-Timing und Zielentfernung
Die Beziehung zwischen Zielgeschwindigkeit, Entfernung und Erkennungserfolg hängt von der Brennweite des Objektivs ab:
| Zielgeschwindigkeit | Entfernung von der Kamera | Pixelbewegung pro Frame (30fps) | Erkennungsrisiko |
|---|---|---|---|
| 2 m/s (gehend) | 50m | ~8 Pixel | Niedrig |
| 5 m/s (laufend) | 50m | ~20 Pixel | Mittel |
| 5 m/s (laufend) | 20m | ~50 Pixel | Hoch |
| 10 m/s (Fahrzeug) | 100m | ~12 Pixel | Niedrig |
| 10 m/s (Fahrzeug) | 30m | ~40 Pixel | Hoch |
Die wichtigste Erkenntnis: Schnelle Ziele in geringer Entfernung sind der schwierigste Fall. Aber in den meisten Perimeter-Sicherungsanwendungen liegt die Erkennungszone 50 bis 200 Meter entfernt. In diesen Entfernungen erzeugt selbst eine laufende Person eine handhabbare Pixelbewegung pro Frame.
Die Rolle der NPU in Szenarien mit schnellen Zielen
Eine schnellere NPU bedeutet nicht nur eine schnellere Inferenz. Sie bedeutet, dass das System mehrere Frames in schneller Folge verarbeiten kann. Wenn der erste Frame aufgrund von Unschärfe fehlschlägt, kann eine 6 TOPS NPU innerhalb von 50 ms den zweiten Frame versuchen. Eine langsamere 1 TOPS NPU benötigt möglicherweise 200 ms zwischen den Versuchen.
Für Szenarien mit Hochgeschwindigkeitszielen ist der NPU-Durchsatz wichtiger als die Latenz einzelner Frames. Das System muss schnell genug versuchen, fehlschlagen und erneut versuchen, damit das Ziel noch im Bild ist, wenn die Erkennung erfolgreich ist.
Wie hoch ist die Erfolgsquote der KI-Erkennung in der ersten Sekunde nach einem PIR-Wake-up?
Die Erfolgsquote ist die Zahl, die wirklich zählt. Es ist mir egal, ob das System theoretisch in 1,5 Sekunden erkennen kann. Mir ist wichtig, wie oft es tatsächlich im Feld erkannt wird, über Jahreszeiten, Temperaturen und Lichtverhältnisse hinweg.
In kontrollierten Tests erreichen unsere industriellen PTZ-Systeme eine KI-Erfolgsquote von 92 % bis 96 % innerhalb der ersten Sekunde nach PIR-Wake-up bei Verwendung von AOV-Pre-Buffering. Ohne AOV sinkt die Erfolgsquote in der ersten Sekunde auf 60 % bis 75 %, wobei die meisten Fehler durch unvollständige AE-Konvergenz bei schlechten Lichtverhältnissen verursacht werden.
 KI-Erfolgsquote nach PIR-Wake-up
KI-Erfolgsquote nach PIR-Wake-up
Was verursacht Fehler in der ersten Sekunde?
Die Fehlerrate von 4 % bis 8 % in optimierten Systemen ergibt sich aus vorhersehbaren Randfällen:
- Extremes Gegenlicht (Ziel vor Sonnenaufgang/-untergang als Silhouette)
- Ziel teilweise durch Vegetation oder Struktur verdeckt
- Sehr geringe Entfernung (Ziel füllt den gesamten Frame, Modell kann Körperproportionen nicht finden)
- Sensorkondensation an feuchten Morgenstunden
Dies sind keine Systemfehler. Es sind physikalische Einschränkungen. Das KI-Modell erholt sich in fast allen Fällen im zweiten oder dritten Frame. Die Gesamtrate der verpassten Erkennungen (Ziel verlässt den Erfassungsbereich, bevor eine Erkennung erfolgt) liegt bei aktiviertem AOV unter 1 %.
Temperatureffekte auf Bootzeit und Erfolgsquote
Ich habe bereits erwähnt, dass die Temperatur die Startzeit des Kristalloszillators beeinflusst. Dies ist kein unwichtiges Detail. Bei Einsätzen im Feld während texanischer Sommer und kanadischer Winter haben wir tatsächliche Unterschiede gemessen:
Bei -20°C benötigt der Kristalloszillator 200 bis 400 ms länger zur Stabilisierung. Auch der DDR-Speicher-Selbsttest verlangsamt sich. In Kombination verlängert extreme Kälte die Gesamtstartzeit um bis zu 500 ms. Dies verschiebt einige Ereignisse über die 2-Sekunden-Marke hinaus.
Bei +55°C kann der thermische Schutz des SoC die Taktfrequenz während der ersten 500 ms des Betriebs drosseln. Dies verlangsamt die KI-Inferenz um 50 bis 100 ms.
Felddaten vs. Labordaten
Labortests verwenden kontrollierte Beleuchtung, feste Zielgeschwindigkeit und Raumtemperatur. Die Leistung im Feld ist immer schlechter. Die Lücke zwischen Labor und Feld beträgt typischerweise 10 bis 15 Prozentpunkte bei der Erkennungsrate von eins zu eins.
Deshalb gebe ich meinen Kunden immer feldvalidierte Zahlen an. Ein Datenblatt, das “100 ms KI-Inferenz” besagt, ist technisch korrekt – aber erst, nachdem das System vollständig hochgefahren ist, das Bild richtig belichtet und das Ziel perfekt positioniert ist. Die reale Leistung umfasst alle unordentlichen Schritte vor Beginn der Inferenz.
Wie die Geschwindigkeit der SD-Karte den Arbeitsablauf beeinflusst
Ein Faktor, der viele Ingenieure überrascht: die SD-Karte. Wenn das System so konfiguriert ist, dass es nach dem Aufwachen sofort Video schreibt, kann eine langsame SD-Karte die gesamte Pipeline blockieren. Das Mounten des Dateisystems und der erste Schreibvorgang können bei einer billigen Karte 300 bis 800 ms dauern.
Unsere Empfehlung: Verwenden Sie Class 10 U3 SD-Karten in Industriequalität6, und konfigurieren Sie die Firmware so, dass Videos während der ersten 2 Sekunden im RAM gepuffert werden. Schreiben Sie erst auf die SD-Karte, nachdem die KI-Erkennung abgeschlossen ist. Dies hält den Erkennungspfad sauber und schnell.
Langzeit-Zuverlässigkeit
Über 12 Monate Dauerbetrieb sollte die Erkennungsrate nicht abnehmen. Bei schlecht konzipierten Systemen tut sie das jedoch. Häufige Ursachen:
- Abnutzung des Flash-Speichers7 auf der Partition für das KI-Modell-Speicher
- Degradation von Sensorpixeln durch ständiges thermisches Cycling
- Firmware-Speicherlecks, die sich über Tausende von Aufwachzyklen ansammeln
Wir führen beschleunigte Alterungstests mit 100.000 Zyklen8 für jede Firmware-Version durch. Das System muss die gleiche Startzeit und Erkennungsrate bei Zyklus 100.000 beibehalten wie bei Zyklus 1. Das unterscheidet Industriequalität von Konsumgüterqualität.
Schlussfolgerung
Kaltstart-KI-Erkennung in 1,5 bis 2,5 Sekunden ist mit der richtigen SoC-Architektur, Firmware-Optimierung und AOV-Vorabpufferung erreichbar. Die Technologie existiert heute in industriellen Systemen – die Frage ist, ob Ihr Lieferant sie tatsächlich implementiert hat oder nur auf einem Datenblatt aufgeführt hat.
1. Überblick über 4G-Solar-PTZ-Überwachungskamerasysteme und ihre Anwendungen. ︎↩︎ 2. Erklärt den Prozess der Ausführung eines trainierten neuronalen Netzes zur Erstellung von Vorhersagen. ︎↩︎ 3. Passiv-Infrarotsensoren erkennen Bewegung durch Messung von Änderungen der Infrarotstrahlung. ︎↩︎ 4. Ein Puffer, der kurzes Video vor einem Auslöser speichert, um sicherzustellen, dass keine Ereignisse verpasst werden. ︎↩︎ 5. Bewegungsunschärfe tritt auf, wenn ein sich bewegendes Objekt mit einer langsamen Verschlusszeit erfasst wird. ︎↩︎ 6. Industrielle SD-Karten bieten höhere Ausdauer und Zuverlässigkeit für kontinuierliche Aufnahmen. ︎↩︎ 7. Flash-Speicherverschleiß bezieht sich auf die Degradation durch wiederholte Programm-/Löschzyklen. ︎↩︎ 8. Beschleunigte Alterungstests simulieren die Langzeitnutzung zur Validierung der Komponenten Zuverlässigkeit. ︎↩︎