
Eu assisti Câmeras PTZ1 encarar uma parede em branco pelo que pareceu uma eternidade depois de perder um alvo. É frustrante e desperdiça bateria em locais com energia solar.
Uma câmera PTZ industrial típica espera entre 15 e 30 segundos em uma obstrução antes de retornar à sua posição inicial. Esse tempo limite é ajustável nas configurações de firmware. Antes que o tempo limite comece, a câmera gasta de 3 a 10 segundos usando algoritmos de predição para encontrar o alvo novamente.
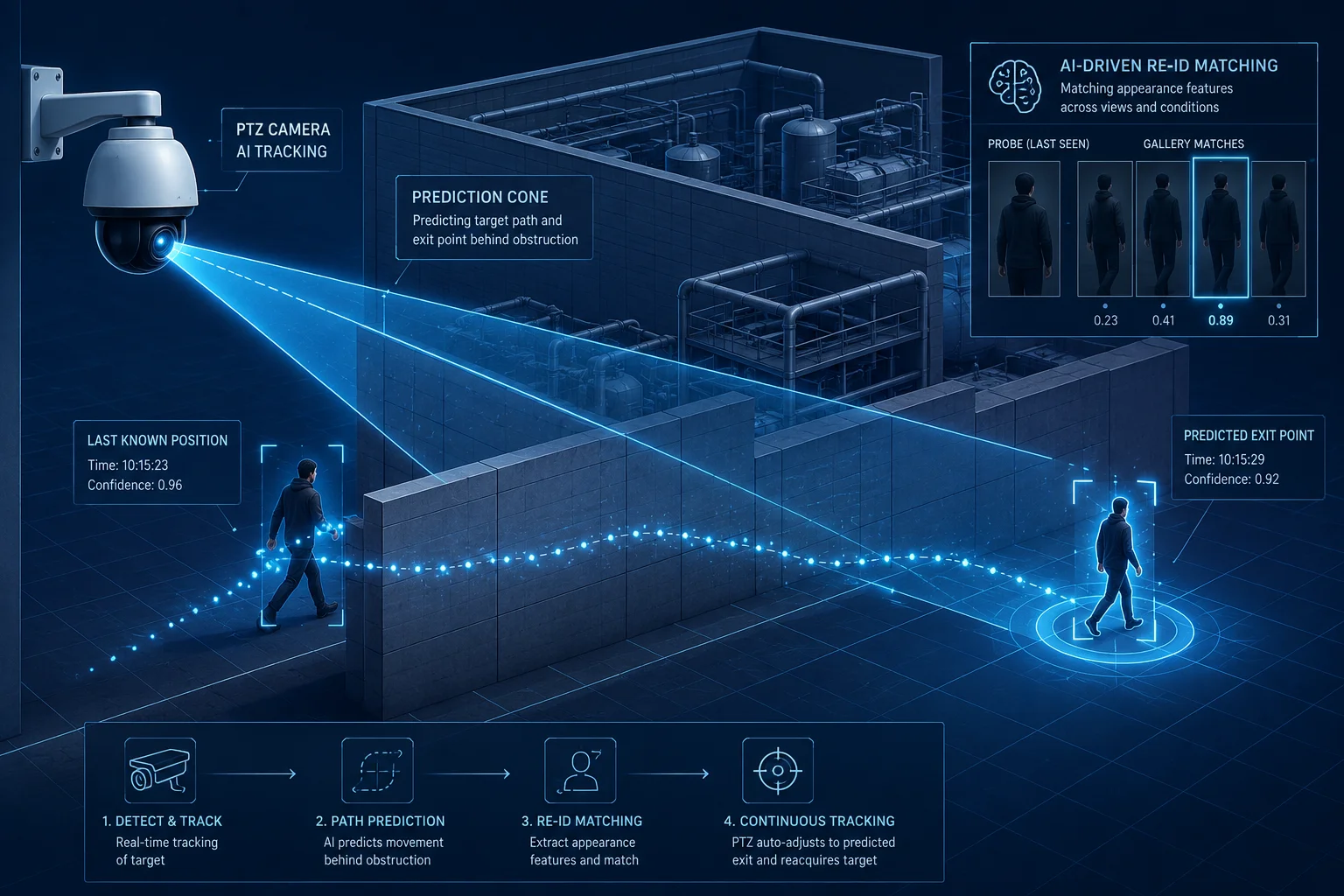
 Câmera PTZ esperando em obstrução antes de retornar à posição inicial
Câmera PTZ esperando em obstrução antes de retornar à posição inicial
Abaixo, detalharei exatamente como essa lógica de espera funciona, como você pode personalizá-la e quais configurações fazem sentido para diferentes ambientes de implantação. Se você está operando um local alimentado por energia solar no interior do Texas ou a entrada de um armazém movimentado, esses detalhes são importantes.
Índice
Posso personalizar o “Tempo de Espera” (por exemplo, 5s a 30s) para um alvo emergir de trás de uma parede?
Sim, você pode. Configurei essa configuração em dezenas de implantações, e acertar economiza vida útil da bateria e reduz o desgaste desnecessário do motor do motor PTZ8.
A maioria das câmeras PTZ industriais permite definir um tempo de espera personalizado entre 5 e 60 segundos através da interface web. Procure a opção ‘Tempo Limite de Rastreamento2‘ ou ‘Atraso de Retorno’ no menu Rastreamento Inteligente. O valor correto depende das condições do seu local.
![]() Interface de configuração do tempo de espera da câmera PTZ
Interface de configuração do tempo de espera da câmera PTZ
Onde Encontrar a Configuração
Na maioria dos firmwares PTZ profissionais, o tempo de espera está em Rastreamento Inteligente > Tempo Limite de Rastreamento no painel de configuração web. Alguns fabricantes o chamam de “Tempo de Permanência” ou “Atraso de Alvo Perdido”. A configuração controla por quanto tempo a câmera mantém sua posição atual após a IA perder o alvo de vista.
Como Escolher o Valor Correto
O tempo limite correto depende do seu ambiente. Uma entrada movimentada de varejo precisa de um tempo limite curto. Um portão de fazenda remoto precisa de um mais longo. Veja como eu penso sobre isso:
| Tipo de Local | Tempo de Espera Recomendado | Razão |
|---|---|---|
| Entrada de alto tráfego | 5s – 10s | Impede que a câmera ignore novas ameaças enquanto olha para o nada |
| Perímetro padrão | 15s – 20s | Abordagem equilibrada para a maioria dos locais comerciais |
| Local remoto/alimentado por energia solar | 20s – 30s | Dá tempo para o alvo reaparecer; conserva ciclos do motor |
| Campo aberto com pouca atividade | 30s – 60s | Maximiza a chance de readquisição em áreas de baixo tráfego |
Por que isso importa para Implantações Solares 4G
Em um local 4G alimentado por energia solar, cada movimento da PTZ custa energia. Se o seu tempo limite for muito curto, a câmera volta para a posição inicial e, em seguida, imediatamente detecta a mesma pessoa saindo de trás de um caminhão. Agora ela está se movendo novamente. São dois ciclos do motor em vez de um.
Recomendo de 15 a 20 segundos para a maioria dos locais solares 4G. Isso dá ao sistema tempo suficiente para capturar um instantâneo de alarme e transmiti-lo via 4G antes que a câmera se mova. Também evita rotação excessiva do motor que drena seu banco de baterias.
A Espera em Duas Fases
O que a maioria das pessoas não percebe é que o “tempo de espera” na verdade tem duas fases. A primeira fase é a fase de predição (3 a 10 segundos), onde a câmera usa um Filtro de Kalman3 para adivinhar para onde o alvo foi. Durante esta fase, a PTZ ainda pode se mover ligeiramente, seguindo o caminho previsto. A segunda fase é a espera estática (seu tempo limite configurado), onde a câmera fica parada e espera. Somente após a conclusão de ambas as fases a câmera retorna à posição inicial.
Portanto, se você definir seu tempo limite para 15 segundos, a espera total real poderá ser de 18 a 25 segundos, quando você incluir a fase de previsão.
A câmera escaneará a área circundante antes de desistir de um alvo oculto?
Eu costumava assumir que a câmera simplesmente ficava lá sem fazer nada durante o período de espera. É assim que o rastreamento moderno de IA funciona.
Câmeras PTZ avançadas realizam uma varredura limitada durante a fase de previsão. O sistema usa a última velocidade e direção conhecidas do alvo para varrer uma pequena área ao redor do ponto de obstrução. Se Re-ID (re-identificação)4 estiver habilitado, a câmera procura ativamente por recursos correspondentes em zonas próximas.
 Área de varredura da câmera PTZ ao redor da obstrução
Área de varredura da câmera PTZ ao redor da obstrução
O que Acontece Durante a Fase de Previsão
Quando um alvo desaparece atrás de uma parede ou veículo, o algoritmo de rastreamento não congela simplesmente. Ele calcula onde o alvo deve emergir com base em três entradas:
- Última velocidade conhecida
- Última direção de viagem conhecida
- Largura da obstrução (estimada a partir da imagem)
A câmera então se move ligeiramente em direção ao ponto de saída previsto. É por isso que às vezes você vê uma PTZ “desviar” alguns graus após perder um alvo. Não é uma falha. É o motor de previsão funcionando.
Re-ID: A Etapa de Correspondência de Recursos
Se sua câmera suporta Re-ID (Re-Identificação), o sistema armazena um instantâneo de recursos do alvo antes que ele desaparecesse. Isso inclui forma do corpo, cor da roupa e padrão de movimento. Quando qualquer objeto emerge perto da obstrução, o sistema o compara com este perfil armazenado.
O que a Câmera NÃO Faz
A câmera não realizará uma varredura completa de 360 graus procurando o alvo perdido. Isso desperdiçaria muito tempo e energia. A varredura é limitada a um cone estreito, tipicamente de 10 a 20 graus de cada lado do caminho previsto.
| Comportamento de Varredura | Habilitado por Padrão? | Ajustável? |
|---|---|---|
| Panorâmica preditiva em direção ao ponto de saída | Sim | Não (orientado por algoritmo) |
| Correspondência de recursos Re-ID | Depende do modelo | Sim (habilitar nas configurações de IA) |
| Varredura de área completa | Não | Pode ser scriptado via SDK |
| Verificação de várias zonas | Não | Sim (com vinculação de predefinições) |
Quando a Varredura Falha
A varredura funciona bem para obstruções finas como postes, árvores ou veículos únicos. Ela tem dificuldades com obstruções largas como edifícios ou muros longos. Se o alvo entrar em um edifício, nenhuma quantidade de varredura ajudará. Nesses casos, a câmera desiste corretamente após o tempo limite e retorna para casa.
Para locais com obstruções largas conhecidas, recomendo configurar posições predefinidas do outro lado do edifício. Você pode vincular essas predefinições à lógica de rastreamento para que a câmera salte para uma posição de “verificação” antes de retornar para casa.
Como a lógica de “Retorno Inteligente” impede que a câmera retorne muito rapidamente?
Eu vi câmeras PTZ baratas voltarem para casa no instante em que perdem um alvo. Fica terrível na reprodução e perde o alvo metade das vezes quando eles reaparecem dois segundos depois.
Lógica de Retorno Inteligente5 adiciona um sistema de atraso graduado que impede o retorno imediato. A câmera mantém a posição por um período configurável, depois realiza uma transição suave de volta para a posição inicial em velocidade reduzida. Isso dá ao sistema uma última chance de readquirir o alvo durante o movimento de retorno.
 Lógica de retorno inteligente PTZ que impede o retorno rápido
Lógica de retorno inteligente PTZ que impede o retorno rápido
As Três Salvaguardas Contra Retorno Prematuro
Câmeras PTZ de nível profissional usam três camadas para evitar o problema de “retorno rápido”:
Salvaguarda 1: Tempo Mínimo de Espera
Mesmo que o seu tempo limite de rastreamento esteja definido para 5 segundos, a maioria dos firmwares impõe um tempo mínimo de espera de 3 segundos. Isso é codificado. A câmera fisicamente não pode retornar à posição inicial mais rápido do que isso. Existe para evitar estresse mecânico nos motores de pan/tilt.
Salvaguarda 2: Velocidade de Retorno Lenta
Quando a câmera retorna à posição inicial, ela não se move na velocidade máxima. O Retorno Inteligente reduz a velocidade de pan para cerca de 30% do máximo durante a viagem de retorno. Por quê? Porque se o alvo reaparecer durante o movimento de retorno, a câmera precisa de tempo para detectá-lo e reverter a direção. Uma câmera se movendo na velocidade máxima ultrapassaria o alvo.
Salvaguarda 3: Janela de Reaquisição
Durante o retorno lento, o motor de IA permanece ativo. Se ele detectar um alvo correspondente em qualquer lugar do quadro durante o movimento de retorno, ele cancela o retorno e rebloqueia. Este é o mecanismo de “última chance”. Eu já vi isso capturar alvos que saíram de trás de um caminhão assim que a câmera começou a voltar para a posição inicial.
Como Isso Economiza Dinheiro
Para integradores que cobram por projeto, uma câmera que retorna muito rápido significa eventos perdidos. Eventos perdidos significam clientes insatisfeitos. Clientes insatisfeitos significam chamadas de garantia. Cada deslocamento para um local remoto custa de R$ 200 a R$ 500. A lógica de Retorno Inteligente não é apenas um recurso de conveniência. Ela reduz diretamente sua taxa de chamadas de retorno.
Configurando o Retorno Inteligente
Na maioria das interfaces de firmware, o Retorno Inteligente é uma opção em PTZ > Ação Inativa > Modo de Retorno. Você verá opções como:
- Retorno Imediato: A câmera retorna na velocidade máxima (não recomendado)
- Retorno Inteligente: A câmera usa atraso graduado e velocidade lenta
- Retorno Atrasado: A câmera espera o tempo limite completo e retorna em velocidade normal
Eu sempre recomendo o Retorno Inteligente para qualquer local onde a precisão do rastreamento seja importante.
Posso acionar um preset de “Ponto Cego” se o alvo desaparecer em uma direção específica?
É aqui que as coisas ficam interessantes. O rastreamento padrão simplesmente desiste e volta para casa. Mas com vinculação de predefinições6, você pode tornar a câmera mais inteligente do que isso.
Sim, você pode configurar gatilhos de predefinição baseados em direção. Se um alvo desaparecer movendo-se para a esquerda, a câmera pode pular para a Predefinição 2 (cobrindo o ponto cego esquerdo). Se eles desaparecerem movendo-se para a direita, ela pula para a Predefinição 3. Isso requer configuração em nível de SDK ou firmware avançado que suporte vinculação de predefinições direcionais9.
 Configuração de predefinições de ponto cego PTZ
Configuração de predefinições de ponto cego PTZ
Como Funciona a Vinculação de Predefinições Direcionais
O conceito é simples. Você divide o campo de visão da câmera em zonas. Cada zona tem uma “direção de fuga” associada. Quando um alvo é perdido em uma zona específica, a câmera não retorna para casa. Em vez disso, ela pula para uma predefinição que cobre para onde o alvo provavelmente foi.
Configurando a Lógica
Aqui está o fluxo de trabalho básico:
-
Defina suas predefinições. Defina a Predefinição 1 como a visualização do portão principal. Defina a Predefinição 2 como o lado esquerdo do prédio. Defina a Predefinição 3 como a área de estacionamento direita.
-
Mapeie as direções de fuga. No SDK ou na configuração avançada, crie regras:
- Alvo perdido movendo-se para a ESQUERDA → Ir para a Predefinição 2, segurar por 10 segundos
- Alvo perdido movendo-se para a DIREITA → Ir para a Predefinição 3, segurar por 10 segundos
- Alvo perdido movendo-se EM DIREÇÃO à câmera → Permanecer no lugar (eles podem estar se aproximando)
- Sem readquirir após pausa → Retornar à página inicial (Predefinição 1)
-
Defina os tempos de pausa para cada predefinição. Cada predefinição de ponto cego deve ter seu próprio tempo de permanência. Um beco estreito pode precisar de apenas 5 segundos. Um amplo estacionamento pode precisar de 15.
Quando usar este recurso
| Cenário | Benefício das predefinições de ponto cego |
|---|---|
| Dois pontos de entrada visíveis de um único ponto de montagem | A câmera verifica o segundo ponto de entrada antes de retornar à página inicial |
| O alvo caminha atrás de um prédio | A câmera salta para o outro lado para pegá-los saindo |
| O veículo entra em uma doca de carga | A câmera se move para a saída da doca para esperar a partida |
| Uma pessoa se aproxima de uma cerca | A câmera se move para o portão para ver se eles entram |
Limitações a saber
Este recurso não está disponível em todas as câmeras. Modelos econômicos não possuem a lógica de firmware para ligação direcional de predefinições. Você precisará de uma câmera que suporte:
- Um SDK aberto com chamadas de predefinição acionadas por eventos
- “Link Inteligente” ou “Lógica de Patrulha” integrados com regras condicionais
Nosso câmeras de rastreamento com IA de lente dupla7 suportam isso através da interface SDK. A lente fixa mantém a visão ampla enquanto a lente PTZ executa o salto de predefinição. Isso significa que você nunca perde a consciência situacional, mesmo durante a verificação do ponto cego.
Um Exemplo do Mundo Real
Imagine uma câmera movida a energia solar no portão de uma fazenda. A visão principal cobre o portão. Mas há uma lacuna na cerca a 30 metros à esquerda. Sem predefinições de ponto cego, uma pessoa que caminha para a esquerda e desaparece atrás do celeiro simplesmente se perde. A câmera retorna à página inicial após 20 segundos.
Com predefinições de ponto cego, a câmera detecta o movimento para a esquerda, salta para a visualização da lacuna da cerca e mantém por 10 segundos. Se a pessoa aparecer na lacuna, a câmera a captura. Se não, ela retorna à posição inicial. Tempo extra total: 10 segundos. Custo de energia extra total: mínimo. Mas a taxa de detecção para esse caminho de ameaça específico vai de 0% para mais de 70%.
Conclusão
Câmeras PTZ esperam de 15 a 30 segundos em um obstáculo antes de retornar à posição inicial. Você pode personalizar esse tempo limite, habilitar varredura inteligente, configurar velocidades de retorno graduais e configurar predefinições de ponto cego direcionais para maximizar as taxas de detecção em seu local.
1. Saiba mais sobre câmeras Pan-Tilt-Zoom e suas aplicações em vigilância. ︎↩︎ 2. Configure a duração que a câmera espera antes de retornar à posição inicial após perder um alvo. ︎↩︎ 3. Entenda como os Filtros de Kalman preveem o movimento do alvo em sistemas de rastreamento. ︎↩︎ 4. Descubra como o Re-ID combina objetos em diferentes visualizações de câmera. ︎↩︎ 5. Saiba como o Retorno Inteligente evita o retorno abrupto e melhora a readquisição. ︎↩︎ 6. Configure posições predefinidas para mover a câmera automaticamente com base em eventos. ︎↩︎ 7. Explore câmeras com lentes fixas e PTZ para visualização ampla contínua e rastreamento. ︎↩︎ 8. Saiba como estender a vida útil dos motores PTZ reduzindo movimentos desnecessários. ︎↩︎ 9. Configure a câmera para saltar para predefinições específicas com base na direção em que um alvo é perdido. ︎↩︎