
لقد شاهدت كاميرات PTZ1 تحدق في جدار فارغ لما بدا وكأنه إلى الأبد بعد فقدان هدف. هذا محبط، ويهدر البطارية في المواقع التي تعمل بالطاقة الشمسية.
تنتظر كاميرا PTZ الصناعية النموذجية ما بين 15 و 30 ثانية عند وجود عائق قبل العودة إلى وضعها الأصلي. يمكن تعديل هذا المهلة في إعدادات البرامج الثابتة. قبل بدء المهلة، تقضي الكاميرا من 3 إلى 10 ثوانٍ في استخدام خوارزميات التنبؤ للعثور على الهدف مرة أخرى.
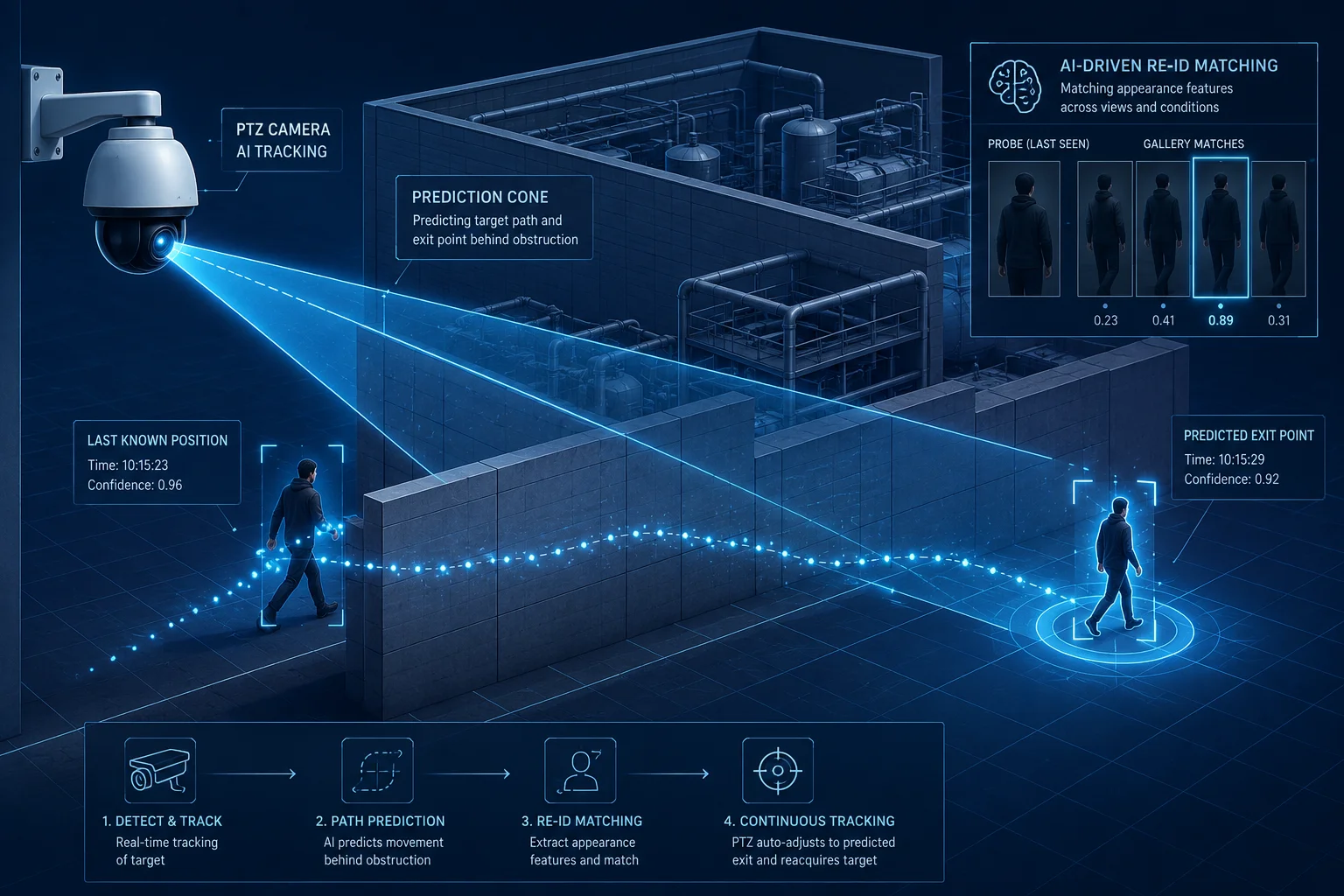
 كاميرا PTZ تنتظر عند وجود عائق قبل العودة إلى الوضع الأصلي
كاميرا PTZ تنتظر عند وجود عائق قبل العودة إلى الوضع الأصلي
أدناه، سأوضح بالتفصيل كيف تعمل منطق الانتظار هذا، وكيف يمكنك تخصيصه، وما هي الإعدادات المناسبة لبيئات النشر المختلفة. سواء كنت تدير موقعًا يعمل بالطاقة الشمسية في ريف تكساس أو مدخل مستودع مزدحم، فإن هذه التفاصيل مهمة.
جدول المحتويات
هل يمكنني تخصيص “وقت الانتظار” (على سبيل المثال، من 5 إلى 30 ثانية) لظهور هدف من خلف جدار؟
نعم، يمكنك ذلك. لقد قمت بتكوين هذا الإعداد في عشرات عمليات النشر، والحصول عليه بشكل صحيح يوفر عمر البطارية ويقلل من تآكل محرك PTZ غير الضروري8.
تسمح لك معظم كاميرات PTZ الصناعية بتعيين وقت انتظار مخصص يتراوح بين 5 و 60 ثانية من خلال واجهة الويب. ابحث عن خيار ‘مهلة التتبع2‘ أو ‘تأخير العودة’ ضمن قائمة التتبع الذكي. تعتمد القيمة الصحيحة على ظروف موقعك.
![]() واجهة تكوين وقت انتظار كاميرا PTZ
واجهة تكوين وقت انتظار كاميرا PTZ
أين تجد الإعداد
في معظم برامج PTZ الاحترافية، يوجد وقت الانتظار ضمن التتبع الذكي > مهلة التتبع في لوحة تكوين الويب. تسمي بعض الشركات المصنعة هذا “وقت الاستقرار” أو “تأخير الهدف المفقود”. يتحكم الإعداد في المدة التي تحتفظ فيها الكاميرا بموضعها الحالي بعد أن يفقد الذكاء الاصطناعي رؤية الهدف.
كيفية اختيار القيمة الصحيحة
يعتمد وقت الانتظار الصحيح على بيئتك. يحتاج مدخل متجر مزدحم إلى وقت انتظار قصير. يحتاج بوابة مزرعة بعيدة إلى وقت أطول. إليك كيف أفكر في الأمر:
| نوع الموقع | وقت الانتظار الموصى به | السبب |
|---|---|---|
| مدخل عالي الحركة | 5 ثوانٍ - 10 ثوانٍ | يمنع الكاميرا من تجاهل التهديدات الجديدة أثناء التحديق في لا شيء |
| محيط قياسي | 15 ثانية - 20 ثانية | نهج متوازن لمعظم المواقع التجارية |
| موقع بعيد / يعمل بالطاقة الشمسية | 20 ثانية - 30 ثانية | يمنح الهدف وقتًا للظهور مرة أخرى؛ يحافظ على دورات المحرك |
| حقل مفتوح بنشاط متناثر | 30 ثانية - 60 ثانية | يزيد فرصة إعادة الاستحواذ في المناطق ذات الحركة المرورية المنخفضة |
لماذا هذا مهم لعمليات نشر الطاقة الشمسية 4G
في موقع 4G يعمل بالطاقة الشمسية، كل حركة PTZ تكلف طاقة. إذا كان وقت الانتظار قصيرًا جدًا، تعود الكاميرا إلى وضعها الأصلي، ثم تلتقط على الفور نفس الشخص وهو يخرج من خلف شاحنة. الآن تتحرك مرة أخرى. هذا يعني دورتين للمحرك بدلاً من واحدة.
أوصي بـ 15 إلى 20 ثانية لمعظم مواقع 4G الشمسية. هذا يمنح النظام وقتًا كافيًا لالتقاط لقطة إنذار وإرسالها عبر 4G قبل أن تتحرك الكاميرا. كما أنه يمنع دوران المحرك المفرط الذي يستنزف بنك البطارية الخاص بك.
فترة الانتظار ذات المرحلتين
ما لا يدركه معظم الناس هو أن “وقت الانتظار” له في الواقع مرحلتان. المرحلة الأولى هي مرحلة التنبؤ (3 إلى 10 ثوانٍ)، حيث تستخدم الكاميرا مرشح كالمان3 لتخمين أين ذهب الهدف. خلال هذه المرحلة، قد تظل كاميرا PTZ تتحرك قليلاً، متبعة المسار المتوقع. المرحلة الثانية هي الثبات الثابت (مهلة الانتهاء التي قمت بتكوينها)، حيث تظل الكاميرا ثابتة وتنتظر. فقط بعد اكتمال المرحلتين تعود الكاميرا إلى وضعها الأصلي.
لذا، إذا قمت بتعيين مهلة الانتهاء الخاصة بك إلى 15 ثانية، فقد يكون إجمالي الانتظار الفعلي من 18 إلى 25 ثانية عند تضمين مرحلة التنبؤ.
هل ستقوم الكاميرا بمسح المنطقة المحيطة قبل التخلي عن هدف مخفي؟
اعتدت أن أفترض أن الكاميرا كانت تجلس هناك لا تفعل شيئًا خلال فترة الانتظار. هذا ليس كيف يعمل تتبع الذكاء الاصطناعي الحديث.
تقوم كاميرات PTZ المتقدمة بإجراء مسح محدود أثناء مرحلة التنبؤ. يستخدم النظام آخر سرعة واتجاه معروفين للهدف لاجتياح منطقة صغيرة حول نقطة الانسداد. إذا تم تمكين4 إعادة التعريف (إعادة التعرف).
 ، تبحث الكاميرا بنشاط عن ميزات مطابقة في المناطق المجاورة.
، تبحث الكاميرا بنشاط عن ميزات مطابقة في المناطق المجاورة.
منطقة مسح كاميرا PTZ حول الانسداد
ماذا يحدث أثناء مرحلة التنبؤ
- عندما يختفي هدف خلف جدار أو مركبة، لا يتجمد خوارزمية التتبع ببساطة. إنها تحسب أين يجب أن يظهر الهدف بناءً على ثلاثة مدخلات:
- آخر سرعة معروفة
- آخر اتجاه معروف للسفر
عرض الانسداد (مقدر من الصورة).
ثم تقوم الكاميرا بالتحريك قليلاً نحو نقطة الخروج المتوقعة. هذا هو السبب في أنك ترى أحيانًا كاميرا PTZ "تنحرف" بضع درجات بعد فقدان هدف. إنه ليس خللاً. إنه محرك التنبؤ الذي يعمل.
إعادة التعريف: خطوة مطابقة الميزات إذا كانت الكاميرا الخاصة بك تدعم, ، يقوم النظام بتخزين لقطة مميزة للهدف قبل اختفائه. يشمل ذلك شكل الجسم، ولون الملابس، ونمط الحركة. عندما يظهر أي كائن بالقرب من العائق، يقارنه النظام بهذا الملف الشخصي المخزن.
ما لا تفعله الكاميرا
لن تقوم الكاميرا بمسح كامل بزاوية 360 درجة بحثًا عن الهدف المفقود. سيؤدي ذلك إلى إهدار الكثير من الوقت والطاقة. يقتصر المسح على مخروط ضيق، عادةً ما بين 10 إلى 20 درجة على جانبي المسار المتوقع.
| سلوك المسح | ممكّن افتراضيًا؟ | قابل للتعديل؟ |
|---|---|---|
| تحريك بانورامي تنبؤي نحو نقطة الخروج | نعم | لا (مدفوع بالخوارزمية) |
| مطابقة ميزة إعادة التعريف | يعتمد على الطراز | نعم (تمكين في إعدادات الذكاء الاصطناعي) |
| مسح المنطقة بالكامل | لا يوجد | يمكن برمجته عبر SDK |
| فحص مناطق متعددة | لا يوجد | نعم (مع ربط الإعدادات المسبقة) |
عند فشل المسح
يعمل المسح بشكل جيد مع العوائق الرفيعة مثل الأعمدة أو الأشجار أو المركبات الفردية. يعاني مع العوائق الواسعة مثل المباني أو الجدران الطويلة. إذا دخل الهدف مبنى، فلن يساعد أي قدر من المسح. في هذه الحالات، تتخلى الكاميرا بشكل صحيح بعد انتهاء المهلة وتعود إلى المنزل.
بالنسبة للمواقع التي توجد بها عوائق واسعة معروفة، أوصي بإعداد مواضع مسبقة على الجانب الآخر من المبنى. يمكنك ربط هذه المواضع المسبقة بمنطق التتبع حتى تقفز الكاميرا إلى موضع “فحص” قبل العودة إلى المنزل.
كيف يمنع منطق “العودة الذكية” الكاميرا من العودة بسرعة كبيرة؟
لقد رأيت كاميرات PTZ الرخيصة تعود إلى المنزل فور فقدانها للهدف. يبدو الأمر فظيعًا عند إعادة التشغيل، وتفقد الهدف نصف الوقت عندما يظهر مرة أخرى بعد ثانيتين.
منطق العودة الذكية5 يضيف نظام تأخير متدرج يمنع الارتداد الفوري. تحتفظ الكاميرا بموضعها لفترة قابلة للتكوين، ثم تقوم بانتقال سلس إلى الوضع الرئيسي بسرعة مخفضة. يمنح هذا النظام فرصة أخيرة لإعادة التقاط الهدف أثناء حركة العودة.
 منطق العودة الذكي للكاميرات PTZ يمنع الارتداد السريع
منطق العودة الذكي للكاميرات PTZ يمنع الارتداد السريع
الضمانات الثلاث ضد العودة المبكرة
تستخدم كاميرات PTZ الاحترافية ثلاث طبقات لمنع مشكلة “الارتداد السريع”:
الضمان 1: الحد الأدنى لوقت الانتظار
حتى لو تم ضبط مهلة التتبع لديك على 5 ثوانٍ، فإن معظم البرامج الثابتة تفرض حدًا أدنى للانتظار يبلغ 3 ثوانٍ. هذا مبرمج بشكل ثابت. لا يمكن للكاميرا فعليًا العودة إلى الوضع الرئيسي بشكل أسرع من ذلك. إنه موجود لمنع الإجهاد الميكانيكي على محركات الحركة الأفقية والرأسية.
الضمان 2: سرعة العودة البطيئة
عندما تعود الكاميرا إلى الوضع الرئيسي، فإنها لا تتحرك بأقصى سرعة. يقلل العودة الذكية سرعة الحركة الأفقية إلى حوالي 30% من الحد الأقصى أثناء رحلة العودة. لماذا؟ لأنه إذا ظهر الهدف مرة أخرى أثناء حركة العودة، تحتاج الكاميرا إلى وقت لاكتشافه وعكس اتجاهه. الكاميرا التي تتحرك بأقصى سرعة ستتجاوز الهدف.
الضمان 3: نافذة إعادة الالتقاط
أثناء العودة البطيئة، يظل محرك الذكاء الاصطناعي نشطًا. إذا اكتشف هدفًا مطابقًا في أي مكان في الإطار أثناء حركة العودة، فإنه يلغي العودة ويعيد القفل. هذه هي آلية “الفرصة الأخيرة”. لقد رأيتها تلتقط أهدافًا خرجت من خلف شاحنة بمجرد أن بدأت الكاميرا في التوجه إلى الوضع الرئيسي.
كيف يوفر هذا المال
بالنسبة للمدمجين الذين يتقاضون أجورهم حسب المشروع، فإن الكاميرا التي ترتد بسرعة كبيرة تعني تفويت الأحداث. الأحداث المفقودة تعني عملاء غير راضين. العملاء غير الراضين يعنيون استدعاءات الضمان. كل رحلة شاحنة إلى موقع بعيد تكلف ما بين 200 دولار و 500 دولار. منطق العودة الذكية ليس مجرد ميزة راحة. إنه يقلل بشكل مباشر من معدل استدعاءاتك.
تكوين العودة الذكية
في معظم واجهات البرامج الثابتة، تكون العودة الذكية عبارة عن مفتاح تبديل ضمن PTZ > إجراء الخمول > وضع العودة. سترى خيارات مثل:
- العودة الفورية: تتحرك الكاميرا للخلف بأقصى سرعة (غير مستحسن)
- العودة الذكية: تستخدم الكاميرا تأخيرًا متدرجًا وسرعة بطيئة
- عودة متأخرة: تنتظر الكاميرا انتهاء المهلة بالكامل، ثم تعود بالسرعة العادية
أوصي دائمًا بالعودة الذكية لأي موقع تكون فيه دقة التتبع مهمة.
هل يمكنني تشغيل إعداد مسبق لـ “نقطة عمياء” إذا اختفى الهدف في اتجاه معين؟
هنا تصبح الأمور مثيرة للاهتمام. التتبع القياسي يتخلى عن الأمر ويعود إلى المنزل. ولكن مع الربط المسبق6, ، يمكنك جعل الكاميرا أذكى من ذلك.
نعم، يمكنك تكوين مشغلات مسبقة تعتمد على الاتجاه. إذا اختفى هدف يتحرك إلى اليسار، يمكن للكاميرا الانتقال إلى الإعداد المسبق 2 (الذي يغطي النقطة العمياء اليسرى). إذا اختفوا يتحركون إلى اليمين، فإنها تنتقل إلى الإعداد المسبق 3. يتطلب هذا تكوينًا على مستوى SDK أو برنامجًا ثابتًا متقدمًا يدعم الربط المسبق الاتجاهي9.
 تكوين الإعداد المسبق للنقطة العمياء PTZ
تكوين الإعداد المسبق للنقطة العمياء PTZ
كيف يعمل الربط المسبق الاتجاهي
المفهوم بسيط. تقوم بتقسيم مجال رؤية الكاميرا إلى مناطق. كل منطقة لها “اتجاه هروب” مرتبط بها. عندما يتم فقدان هدف في منطقة معينة، لا تعود الكاميرا إلى المنزل. بدلاً من ذلك، تنتقل إلى إعداد مسبق يغطي المكان الذي من المحتمل أن يكون الهدف قد ذهب إليه.
إعداد المنطق
إليك سير العمل الأساسي:
-
حدد الإعدادات المسبقة الخاصة بك. قم بتعيين الإعداد المسبق 1 كمنظر لبوابتك الرئيسية. قم بتعيين الإعداد المسبق 2 كجانب المبنى الأيسر. قم بتعيين الإعداد المسبق 3 كمنطقة وقوف السيارات اليمنى.
-
قم بتعيين اتجاهات الهروب. في SDK أو التكوين المتقدم، قم بإنشاء قواعد:
- تم فقدان الهدف يتحرك إلى اليسار → انتقل إلى الإعداد المسبق 2، استمر لمدة 10 ثوانٍ
- تم فقدان الهدف يتحرك إلى اليمين → انتقل إلى الإعداد المسبق 3، استمر لمدة 10 ثوانٍ
- تم فقدان الهدف يتحرك نحو الكاميرا → ابق في مكانك (قد يقتربون)
- لا إعادة استحواذ بعد التثبيت → العودة إلى المنزل (الإعداد المسبق 1)
-
اضبط أوقات التثبيت لكل إعداد مسبق. يجب أن يكون لكل إعداد مسبق لنقطة عمياء وقت استقرار خاص به. قد يحتاج زقاق ضيق إلى 5 ثوانٍ فقط. قد يحتاج موقف سيارات واسع إلى 15 ثانية.
متى تستخدم هذه الميزة
| السيناريو | فائدة الإعدادات المسبقة للنقاط العمياء |
|---|---|
| نقطتا دخول مرئيتان من حامل واحد | تتحقق الكاميرا من نقطة الدخول الثانية قبل العودة إلى المنزل |
| الهدف يسير خلف مبنى | تقفز الكاميرا إلى الجانب الآخر لالتقاط خروجه |
| تدخل مركبة إلى رصيف تحميل | تنتقل الكاميرا إلى مخرج الرصيف لانتظار المغادرة |
| يقترب شخص من خط سياج | تقوم الكاميرا بالدوران نحو البوابة لمعرفة ما إذا كانوا سيدخلون |
قيود يجب معرفتها
هذه الميزة غير متوفرة في جميع الكاميرات. تفتقر الموديلات الاقتصادية إلى منطق البرامج الثابتة لربط الإعدادات المسبقة الاتجاهية. ستحتاج إلى كاميرا تدعم أحد الخيارات التالية:
- حزمة تطوير برامج مفتوحة (SDK) مع استدعاءات إعدادات مسبقة مشغلة بالأحداث
- “ربط ذكي” مدمج أو “منطق دورية” مع قواعد شرطية
برنامجنا كاميرات تتبع بالذكاء الاصطناعي مزدوجة العدسات7 تدعم هذا من خلال واجهة حزمة تطوير البرامج (SDK). تحافظ العدسة الثابتة على العرض الواسع بينما تنفذ عدسة PTZ قفزة الإعداد المسبق. هذا يعني أنك لا تفقد الوعي بالموقف أبدًا، حتى أثناء فحص النقطة العمياء.
مثال من واقع الحياة
تخيل كاميرا تعمل بالطاقة الشمسية عند بوابة مزرعة. يغطي العرض الرئيسي البوابة. ولكن هناك فجوة في السياج على بعد 30 مترًا إلى اليسار. بدون إعدادات مسبقة للنقاط العمياء، يُفقد ببساطة شخص يسير إلى اليسار ويختفي خلف الحظيرة. تعود الكاميرا إلى المنزل بعد 20 ثانية.
مع الإعدادات المسبقة لنقطة العمى، تكتشف الكاميرا الحركة نحو اليسار، وتقفز إلى عرض فجوة السياج، وتستمر لمدة 10 ثوانٍ. إذا ظهر شخص عند الفجوة، تلتقطه الكاميرا. إذا لم يظهر، تعود إلى وضعها الأصلي. إجمالي الوقت الإضافي: 10 ثوانٍ. إجمالي تكلفة الطاقة الإضافية: ضئيلة. لكن معدل الكشف عن مسار التهديد المحدد هذا يرتفع من 0% إلى أكثر من 70%.
الخاتمة
تنتظر كاميرات PTZ من 15 إلى 30 ثانية عند وجود عائق قبل العودة إلى وضعها الأصلي. يمكنك تخصيص هذا المهلة، وتمكين المسح الذكي، وتكوين سرعات عودة متدرجة، وإعداد نقاط عمى اتجاهية مسبقة لزيادة معدلات الكشف في موقعك.
1. تعرف على كاميرات Pan-Tilt-Zoom وتطبيقاتها في المراقبة. ︎↩︎ 2. قم بتكوين المدة التي تنتظرها الكاميرا قبل العودة إلى وضعها الأصلي بعد فقدان الهدف. ︎↩︎ 3. افهم كيف تتنبأ مرشحات كالمان بحركة الهدف في أنظمة التتبع. ︎↩︎ 4. اكتشف كيف تقوم Re-ID بمطابقة الكائنات عبر وجهات نظر كاميرات مختلفة. ︎↩︎ 5. تعرف على كيف تمنع ميزة "العودة الذكية" الارتداد المفاجئ وتحسن إعادة الالتقاط. ︎↩︎ 6. قم بتكوين المواضع المسبقة لتحريك الكاميرا تلقائيًا بناءً على الأحداث. ︎↩︎ 7. استكشف الكاميرات التي تحتوي على عدسات ثابتة وعدسات PTZ للحصول على عرض واسع مستمر وتتبع. ︎↩︎ 8. تعلم كيفية إطالة عمر محركات PTZ عن طريق تقليل الحركات غير الضرورية. ︎↩︎ 9. قم بتكوين الكاميرا للانتقال إلى إعدادات مسبقة محددة بناءً على اتجاه فقدان الهدف. ︎↩︎