
J'ai regardé Caméras PTZ1 fixer un mur blanc pendant ce qui m'a semblé une éternité après avoir perdu une cible. C'est frustrant et cela gaspille la batterie sur les sites solaires.
Une caméra PTZ industrielle typique attend entre 15 et 30 secondes à un obstacle avant de retourner à sa position d'origine. Ce délai d'attente est réglable dans les paramètres du firmware. Avant que le délai d'attente ne commence, la caméra passe 3 à 10 secondes à utiliser des algorithmes de prédiction pour retrouver la cible.
 La caméra PTZ attend à un obstacle avant de retourner à sa position d'origine
La caméra PTZ attend à un obstacle avant de retourner à sa position d'origine
Ci-dessous, j'expliquerai exactement comment fonctionne cette logique d'attente, comment vous pouvez la personnaliser et quels paramètres sont appropriés pour différents environnements de déploiement. Que vous exploitiez un site alimenté à l'énergie solaire dans le Texas rural ou l'entrée d'un entrepôt animé, ces détails sont importants.
Table des matières
Puis-je personnaliser le “ temps d'attente ” (par exemple, 5s à 30s) pour qu'une cible émerge de derrière un mur ?
Oui, vous le pouvez. J'ai configuré ce paramètre sur des dizaines de déploiements, et le régler correctement permet d'économiser la batterie et de réduire les usures inutiles du moteur PTZ8.
La plupart des caméras PTZ industrielles vous permettent de définir un temps d'attente personnalisé entre 5 et 60 secondes via l'interface web. Recherchez l'option ‘Délai de suivi2‘ ou ‘ Délai de retour ’ dans le menu Suivi intelligent. La valeur correcte dépend des conditions de votre site.
![]() Interface de configuration du temps d'attente de la caméra PTZ
Interface de configuration du temps d'attente de la caméra PTZ
Où trouver le réglage
Dans la plupart des firmwares PTZ professionnels, le temps d'attente se trouve sous Suivi intelligent > Délai de suivi dans le panneau de configuration web. Certains fabricants l'appellent “ Temps de dwell ” ou “ Délai de cible perdue ”. Le paramètre contrôle la durée pendant laquelle la caméra maintient sa position actuelle après que l'IA a perdu de vue la cible.
Comment choisir la bonne valeur
Le bon délai d'attente dépend de votre environnement. Une entrée de magasin très fréquentée nécessite un délai court. Une barrière de ferme isolée nécessite un délai plus long. Voici comment je réfléchis :
| Type de site | Temps d'attente recommandé | Raison |
|---|---|---|
| Entrée à fort trafic | 5s – 10s | Empêche la caméra d'ignorer de nouvelles menaces tout en fixant le vide |
| Périmètre standard | 15s – 20s | Approche équilibrée pour la plupart des sites commerciaux |
| Site isolé/alimenté par énergie solaire | 20s – 30s | Donne au sujet le temps de réapparaître ; économise les cycles du moteur |
| Champ ouvert avec peu d'activité | 30s – 60s | Maximise les chances de réacquisition dans les zones à faible trafic |
Pourquoi c'est important pour les déploiements solaires 4G
Sur un site 4G alimenté par énergie solaire, chaque mouvement de PTZ coûte de l'énergie. Si votre délai d'attente est trop court, la caméra retourne à sa position initiale, puis détecte immédiatement la même personne sortant de derrière un camion. Elle bouge alors à nouveau. Cela fait deux cycles moteur au lieu d'un.
Je recommande 15 à 20 secondes pour la plupart des sites solaires 4G. Cela donne au système suffisamment de temps pour capturer un instantané d'alarme et le transmettre via la 4G avant que la caméra ne bouge. Cela évite également une rotation excessive du moteur qui épuise votre parc de batteries.
Le délai en deux phases
Ce que la plupart des gens ne réalisent pas, c'est que le “ temps d'attente ” comporte en fait deux phases. La première phase est la phase de prédiction (3 à 10 secondes), où la caméra utilise un Filtre de Kalman3 pour deviner où la cible est allée. Pendant cette phase, la PTZ peut encore bouger légèrement, suivant la trajectoire prédite. La deuxième phase est le maintien statique (votre délai configuré), où la caméra reste immobile et attend. Ce n'est qu'après la fin des deux phases que la caméra retourne à sa position initiale.
Donc, si vous définissez votre délai sur 15 secondes, l'attente totale réelle pourrait être de 18 à 25 secondes en incluant la phase de prédiction.
La caméra scannera-t-elle la zone environnante avant d'abandonner une cible cachée ?
J'avais l'habitude de supposer que la caméra restait là sans rien faire pendant la période d'attente. Ce n'est pas ainsi que fonctionne le suivi IA moderne.
Les caméras PTZ avancées effectuent un balayage limité pendant la phase de prédiction. Le système utilise la dernière vitesse et direction connues de la cible pour balayer une petite zone autour du point d'obstruction. Si Re-ID (ré-identification)4 est activé, la caméra recherche activement des caractéristiques correspondantes dans les zones voisines.
 Zone de balayage de la caméra PTZ autour de l'obstruction
Zone de balayage de la caméra PTZ autour de l'obstruction
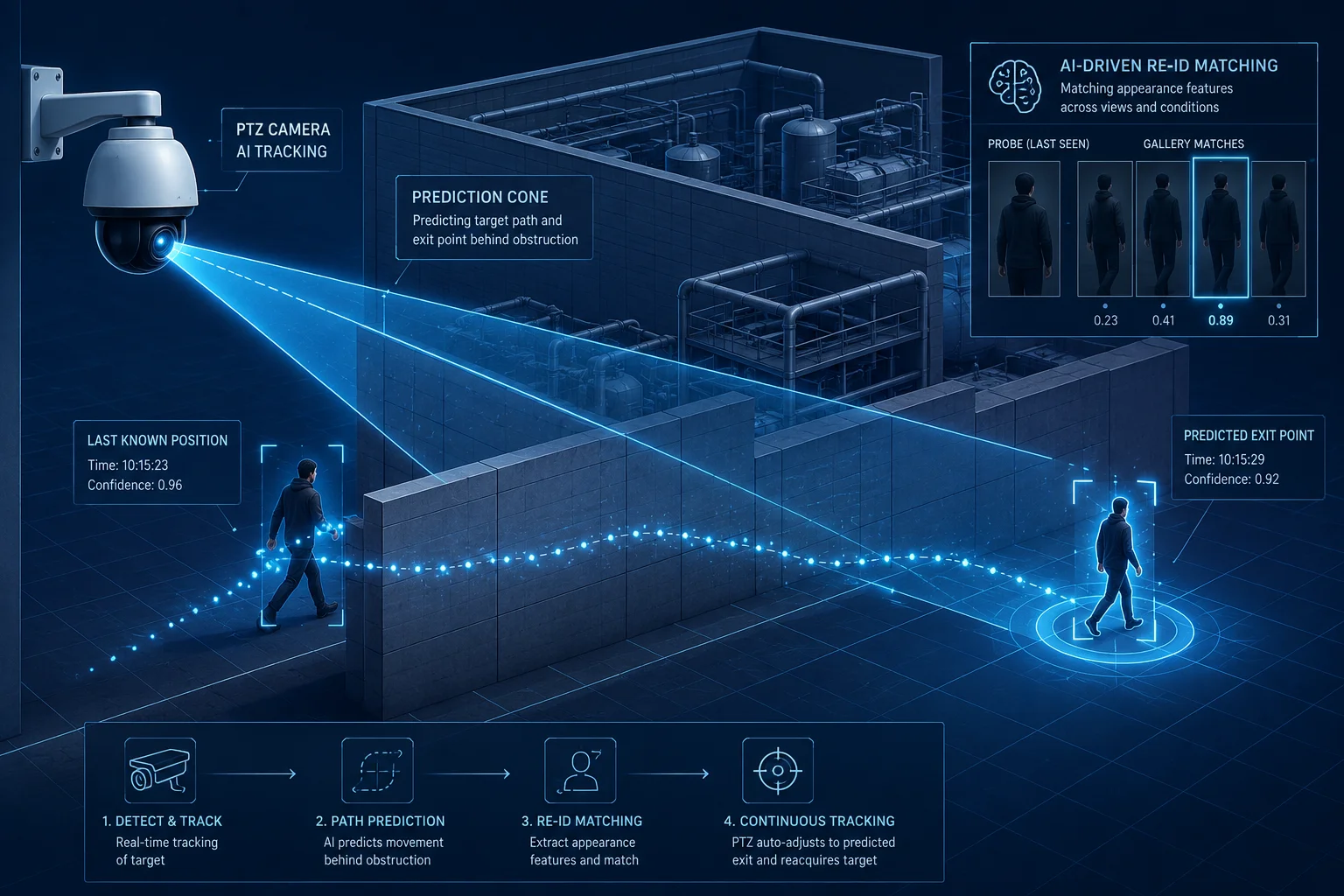
Ce qui se passe pendant la phase de prédiction
Lorsqu'une cible disparaît derrière un mur ou un véhicule, l'algorithme de suivi ne se fige pas. Il calcule où la cible devrait réapparaître en se basant sur trois entrées :
- Dernière vitesse connue
- Dernière direction de déplacement connue
- Largeur de l'obstruction (estimée à partir de l'image)
La caméra effectue ensuite un léger panoramique vers le point de sortie prédit. C'est pourquoi vous voyez parfois une PTZ “dériver” de quelques degrés après avoir perdu une cible. Ce n'est pas un bug. C'est le moteur de prédiction qui fonctionne.
Re-ID : L'étape de correspondance des caractéristiques
Si votre caméra prend en charge Re-ID (Ré-Identification), le système enregistre un instantané des caractéristiques de la cible avant sa disparition. Cela inclut la forme du corps, la couleur des vêtements et le schéma de mouvement. Lorsqu'un objet émerge près de l'obstruction, le système le compare à ce profil stocké.
Ce que la caméra NE FAIT PAS
La caméra n'effectuera pas un balayage complet à 360 degrés à la recherche de la cible perdue. Cela gaspillerait trop de temps et d'énergie. Le balayage est limité à un cône étroit, généralement de 10 à 20 degrés de chaque côté de la trajectoire prédite.
| Comportement de balayage | Activé par défaut ? | Réglable ? |
|---|---|---|
| Panoramique prédictif vers le point de sortie | Oui | Non (piloté par algorithme) |
| Correspondance des caractéristiques Re-ID | Dépend du modèle | Oui (activer dans les paramètres IA) |
| Balayage de zone complète | Non | Peut être scripté via SDK |
| Vérification multi-zones | Non | Oui (avec liaison de préréglages) |
En cas d'échec du balayage
Le balayage fonctionne bien pour les obstructions fines comme les poteaux, les arbres ou les véhicules uniques. Il a du mal avec les obstructions larges comme les bâtiments ou les longs murs. Si la cible entre dans un bâtiment, aucun balayage ne sera utile. Dans ces cas, la caméra abandonne correctement après le délai d'attente et retourne à sa position d'origine.
Pour les sites avec des obstructions larges connues, je recommande de configurer des positions prédéfinies de l'autre côté du bâtiment. Vous pouvez lier ces préréglages à la logique de suivi afin que la caméra saute vers une position de “vérification” avant de retourner à sa position d'origine.
Comment la logique de “ retour intelligent ” empêche-t-elle la caméra de revenir trop rapidement ?
J'ai vu des caméras PTZ bon marché revenir instantanément à leur position d'origine dès qu'elles perdent une cible. Cela rend mal la lecture, et elles manquent la cible la moitié du temps lorsqu'elle réapparaît deux secondes plus tard.
Logique de retour intelligent5 ajoute un système de délai gradué qui empêche un retour immédiat. La caméra maintient sa position pendant une période configurable, puis effectue une transition douce vers la position initiale à vitesse réduite. Cela donne au système une dernière chance de réacquérir la cible pendant le mouvement de retour.
 Logique de retour intelligent PTZ empêchant un retour rapide
Logique de retour intelligent PTZ empêchant un retour rapide
Les trois protections contre le retour prématuré
Les caméras PTZ professionnelles utilisent trois niveaux de protection pour éviter le problème du “retour rapide” :
Protection 1 : Temps de maintien minimum
Même si votre délai de suivi est réglé sur 5 secondes, la plupart des firmwares imposent un maintien minimum de 3 secondes. Ceci est codé en dur. La caméra ne peut physiquement pas revenir à sa position initiale plus rapidement que cela. Cela existe pour éviter les contraintes mécaniques sur les moteurs de panoramique/inclinaison.
Protection 2 : Vitesse de retour lente
Lorsque la caméra revient à sa position initiale, elle ne se déplace pas à pleine vitesse. Le retour intelligent réduit la vitesse de panoramique à environ 30% de la vitesse maximale pendant le trajet de retour. Pourquoi ? Parce que si la cible réapparaît pendant le mouvement de retour, la caméra a besoin de temps pour la détecter et inverser sa direction. Une caméra se déplaçant à pleine vitesse dépasserait la cible.
Protection 3 : Fenêtre de réacquisition
Pendant le retour lent, le moteur d'IA reste actif. S'il détecte une cible correspondante n'importe où dans le cadre pendant le mouvement de retour, il annule le retour et se ré-verrouille. C'est le mécanisme de “dernière chance”. J'ai vu cela capturer des cibles qui étaient revenues de derrière un camion juste au moment où la caméra commençait à rentrer.
Comment cela vous fait économiser de l'argent
Pour les intégrateurs facturant au projet, une caméra qui revient trop rapidement signifie des événements manqués. Des événements manqués signifient des clients mécontents. Des clients mécontents signifient des rappels sous garantie. Chaque intervention sur site distant coûte entre 200 et 500 dollars. La logique de retour intelligent n'est pas seulement une fonctionnalité pratique. Elle réduit directement votre taux de rappels.
Configuration du retour intelligent
Dans la plupart des interfaces de firmware, le retour intelligent est une option à bascule sous PTZ > Action au ralenti > Mode de retour. Vous verrez des options telles que :
- Retour immédiat : La caméra revient à pleine vitesse (non recommandé)
- Retour intelligent : La caméra utilise un délai gradué et une vitesse lente
- Retour retardé : La caméra attend la durée complète du délai d'attente, puis revient à vitesse normale
Je recommande toujours le Retour Intelligent pour tout site où la précision du suivi est importante.
Puis-je déclencher un préréglage de “ zone de silence ” si la cible disparaît dans une direction spécifique ?
C'est là que les choses deviennent intéressantes. Le suivi standard abandonne et rentre. Mais avec le lien prédéfini6, vous pouvez rendre la caméra plus intelligente que cela.
Oui, vous pouvez configurer des déclencheurs de préréglage basés sur la direction. Si une cible disparaît en se déplaçant vers la gauche, la caméra peut passer au Préréglage 2 (couvrant le point mort gauche). Si elle disparaît en se déplaçant vers la droite, elle passe au Préréglage 3. Cela nécessite une configuration au niveau du SDK ou un firmware avancé qui prend en charge le lien de préréglage directionnel9.
 Configuration du préréglage du point mort PTZ
Configuration du préréglage du point mort PTZ
Comment fonctionne le lien de préréglage directionnel
Le concept est simple. Vous divisez le champ de vision de la caméra en zones. Chaque zone a une “direction d'évasion” associée. Lorsqu'une cible est perdue dans une zone spécifique, la caméra ne rentre pas. Au lieu de cela, elle passe à un préréglage qui couvre l'endroit où la cible est probablement allée.
Configuration de la logique
Voici le flux de travail de base :
-
Définissez vos préréglages. Définissez le Préréglage 1 comme vue de votre porte principale. Définissez le Préréglage 2 comme le côté gauche du bâtiment. Définissez le Préréglage 3 comme la zone de stationnement droite.
-
Mappez les directions d'évasion. Dans le SDK ou la configuration avancée, créez des règles :
- Cible perdue se déplaçant vers la GAUCHE → Aller au Préréglage 2, maintenir 10 secondes
- Cible perdue se déplaçant vers la DROITE → Aller au Préréglage 3, maintenir 10 secondes
- Cible perdue se déplaçant VERS la caméra → Rester en place (elle pourrait approcher)
- Pas de réacquisition après maintien → Retour à l'accueil (Préréglage 1)
-
Définir les temps de maintien pour chaque préréglage. Chaque préréglage de zone d'angle mort doit avoir son propre temps de séjour. Une ruelle étroite peut n'avoir besoin que de 5 secondes. Un grand parking peut nécessiter 15 secondes.
Quand utiliser cette fonctionnalité
| Scénario | Avantages des préréglages de zone d'angle mort |
|---|---|
| Deux points d'entrée visibles depuis un seul support | La caméra vérifie le deuxième point d'entrée avant de retourner à l'accueil |
| La cible passe derrière un bâtiment | La caméra se déplace de l'autre côté pour la capturer à sa sortie |
| Un véhicule entre dans une aire de chargement | La caméra se déplace vers la sortie de l'aire de chargement pour attendre le départ |
| Une personne s'approche d'une clôture | La caméra effectue un panoramique vers le portail pour voir si elle entre |
Limitations à connaître
Cette fonctionnalité n'est pas disponible sur toutes les caméras. Les modèles économiques manquent de la logique du micrologiciel pour la liaison directionnelle des préréglages. Vous aurez besoin d'une caméra qui prend en charge l'une des options suivantes :
- Un SDK ouvert avec des appels de préréglages déclenchés par des événements
- “Liaison intelligente” ou “Logique de patrouille” intégrée avec des règles conditionnelles
Notre Caméras de suivi IA à double objectif7 prennent en charge cela via l'interface SDK. L'objectif fixe maintient la vue large tandis que l'objectif PTZ exécute le saut de préréglage. Cela signifie que vous ne perdez jamais la conscience situationnelle, même pendant la vérification de la zone d'angle mort.
Un exemple concret
Imaginez une caméra solaire à la porte d'une ferme. La vue principale couvre la porte. Mais il y a une brèche dans la clôture à 30 mètres à gauche. Sans préréglages de zone d'angle mort, une personne qui marche vers la gauche et disparaît derrière la grange est simplement perdue. La caméra retourne à l'accueil après 20 secondes.
Avec les préréglages de zone d'angle mort, la caméra détecte le mouvement vers la gauche, saute à la vue de l'ouverture de la clôture et s'y maintient pendant 10 secondes. Si une personne apparaît à l'ouverture, la caméra la capture. Sinon, elle retourne à sa position initiale. Temps supplémentaire total : 10 secondes. Coût énergétique supplémentaire total : minimal. Mais le taux de détection pour ce chemin de menace spécifique passe de 0% à plus de 70%.
Conclusion
Les caméras PTZ attendent 15 à 30 secondes à un obstacle avant de retourner à leur position initiale. Vous pouvez personnaliser ce délai d'attente, activer le balayage intelligent, configurer des vitesses de retour graduelles et définir des préréglages de zone d'angle mort directionnels pour maximiser les taux de détection sur votre site.
1. Apprenez-en davantage sur les caméras Pan-Tilt-Zoom et leurs applications en matière de vidéosurveillance. ︎↩︎ 2. Configurez la durée pendant laquelle la caméra attend avant de retourner à sa position initiale après avoir perdu une cible. ︎↩︎ 3. Comprenez comment les filtres de Kalman prédisent le mouvement de la cible dans les systèmes de suivi. ︎↩︎ 4. Découvrez comment Re-ID associe des objets entre différentes vues de caméra. ︎↩︎ 5. Apprenez comment le retour intelligent évite un retour brusque et améliore la réacquisition. ︎↩︎ 6. Configurez des positions prédéfinies pour déplacer automatiquement la caméra en fonction des événements. ︎↩︎ 7. Explorez les caméras avec des objectifs fixes et PTZ pour une vue large continue et un suivi. ︎↩︎ 8. Apprenez à prolonger la durée de vie des moteurs PTZ en réduisant les mouvements inutiles. ︎↩︎ 9. Configurez la caméra pour qu'elle saute vers des préréglages spécifiques en fonction de la direction dans laquelle une cible est perdue. ︎↩︎